Pedestrian Action Prediction using Static Image Feature
Kenji Nishida
1
, Takumi Kobayashi
1
, Taro Iwamoto
2
and Shinya Yamasaki
2
1
National Institute of Advanced Industrial Science and Technology (AIST), 1-1-1 Umezono,
Tsukuba Ibaraki, 305-8568, Japan
2
Mazda Motor Co., 2-5 Moriya-cho Kanagawa-ku, Yokohama, Kanagawa 221-0022, Japan
Keywords:
Action Prediction, Feature Selection, Intelligent Transport System, Image Feature Extraction.
Abstract:
In this study, we propose a method to predict how the pedestrian move (run or walk) in the future by using
only appearance-based image features. Such kind of motion prediction significantly contributes to intelligent
braking system in cars; knowing that the objects will run in several seconds such as for crossing streets, the
car can start braking in advance, to effectively reduce the risk for crash accidents. In the proposed method,
we empirically evaluate which frames preceding the target action, ’running’ in this case, are effective for
predicting it in the framework of feature selection. By using the most effective frames at which the image
features are extracted, we can build the action prediction method. In the experiments, those frames are found
around 0.37 second before running action and we also show that they are closely related to human motion
phases from walking to running via biomechanical analysis.
1 INTRODUCTION
According to Japanese traffic accident statis-
tics (Ishikawa, 2010), the number of pedestrian
accidents are not decreasing while total number of
accidents are decreasing. Moreover, the fatality rate
in the pedestrian accidents are five times higher than
the other accidents. Therefore, prevention of the
pedestrian accidents is one of the most urgent issue
in our society. The statistics (Ishikawa, 2010) also
shows that 70% of the fatal pedestrian accidents
occurred during crossing streets, and thus it is par-
ticularly important to safely detect/recognize those
crossing pedestrians.
The fatality risk of pedestrian accidents is actu-
ally affected by the impact speed (Rosen and Sander,
2009): it is about 4% at the impact speed of 40km/h
while it increases to about 10% at 50km/h and 20%
at 60km/h. Thus, roughly speaking, the fatal risk
decreases by 10% as the impact speed decreases by
10km/h. In the situation that automatic emergency
braking (AEB) system works on 6m/s
2
as defined by
Euro-NCAP (Hulshof et al., 2013), it also means that
if a car brakes 0.5 sec earlier, the fatality risk in pedes-
trian accidents would be decreased by 10%. For real-
izing early braking, it is not sufficient only to detect
pedestrians, but it is highly requited to recognize the
pedestrian action of high risk, such as crossing street
with running, as early as possible.
In the last decade, pedestrian detection is one of
the most successful applications in the computer vi-
sion and pattern recognition fields. For example,
Dalal and Triggs attained over 99% detection rate by
introducing HOG feature (Daral, 2005), and very re-
cently it is further improved by deep CNN (Ouyang et
al., 2015). However, as described above, just detect-
ing pedestrians is not sufficient for reducing the risk
of pedestrian-car accidents. Keller and Gavrila de-
tected crossing people by analyzing pedestrian move-
ment which can be distinguished by the trajectory
in the feature space (Keller and Gavrila, 2014). Al-
though they showed promising results such as the ac-
curacy of 0.8 in classifying the correct pedestrian ac-
tion about 570 ms before the event, it is generally
difficult to estimate the precise movement of pedes-
trians from on-board camera due to its self-motion
(shaking). Reddy and Krishnaiah focused on running
pose to detect the pedestrian crossing streets (Reddy
and Krishnaiah, 2013). These approaches detect the
change of pedestrian action from walking to running
with the accuracy of 92%, but the detection is per-
formed after the pedestrian already starts running,
which is considered to be too late to contribute toward
early braking.
We tackle a challenging problem to predict a high
risk human action before it actually occurs. In the
Nishida, K., Kobayashi, T., Iwamoto, T. and Yamasaki, S..
Pedestrian Action Prediction using Static Image Feature.
In Proceedings of the 7th International Joint Conference on Computational Intelligence (IJCCI 2015) - Volume 3: NCTA, pages 99-105
ISBN: 978-989-758-157-1
Copyright
c
2015 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
99

realistic situations, we have to pay careful attention
to the pedestrians that cross a street with suddenly
running and such (sudden) running is regarded as a
high risk action to be treated by AEB system with
early braking. Therefore, in this paper, we address
the problem to predict the (sudden) running action of
pedestrians by detecting the sign for that action which
preindicates the running actions beforehand. In ad-
dition, we employ an appearance-based approach us-
ing only static image features, though motion features
might be suitable for recognizing actions, since it is
quite hard to extract reliable motion features from a
moving on-board camera. There is a primary ques-
tion how early we can predict the running action, or
more basically, whether such sign (preindicator) ex-
ists or not. We empirically answer this question in the
framework of feature selection and show the effective
preindicator from the quantitative viewpoint. Besides,
we also give useful qualitative meaning to it from the
biomechanical viewpoints.
2 APPEARANCE BASED ACTION
PREDICTION
In this section, we detail the action prediction method
using only static image features. This method is based
on the assumption that the action preindicator can be
sufficiently described by distinctive pedestrian shape,
not motion itself.
2.1 Static Image Feature
To characterize the human shape in detail, we
employ gradient local auto-correlation (GLAC)
method (Kobayashi and Otsu, 2008). The GLAC
method extracts co-occurrence of gradient orientation
as second-order statistics while HOG (Daral, 2005)
is based only on first-order statistics of occurrence of
gradient orientations. Suppose the pedestrian is de-
tected by arbitrary methods and the bounding box en-
closing the pedestrian is provided as shown in fig. 1.
As in the common approach such as of HOG (Daral,
2005), the bounding box is spatially partitioned into
regular grids of 3 × 3 at each of which the GLAC fea-
tures are extracted, then the final feature vector is con-
structed by concatenating those feature vectors; the
setting of 9 orientation bins for gradients and 4 spa-
tial co-occurrence patterns produces GLAC features
of 324 dimensionality, and the final feature is formed
as a 2916 = 324 × 3 × 3 dimensional vector.
The spatial grids of 3 × 3 is much coarser com-
pared to HOG-related methods. The GLAC method
can characterize the human shape more discrimina-
tively due to exploiting co-occurrence and thus even
such coarser grids are enough for static image fea-
tures. In addition, the coarser grids render robustness
regarding spatial position of human shape; that is,
the features are stably extracted even for miss-aligned
bounding boxes. On the other hand, 3 × 3 grids are
considered as the coarsest one for capturing the hu-
man shape; head, torso, two arms and two legs are
roughly aligned to respective spatial grids.
2.2 Action Prediction
Based on the time-series sequence of image features
extracted in the bounding boxes, we predict the action
which will occur in the near future.
We consider the subsequence of T frames which
are represented by image feature vectors as described
in the previous subsection. Then, we pick up D
frames (feature vectors) from them, [t − D + 1,t], to
predict the action which will occur at the T -th frame
indexed as time 0. Those D feature vectors are con-
catenated to single feature vector of relatively high
dimension (fig. 2) which is finally passed to a linear
SVM classifier for predicting whether running will
occur at time 0 or not. The concatenated feature indi-
rectly encodes motion information of pedestrian dur-
ing D frames. Because we can not know which tim-
ing {t, D} produces better performance for predicting
the running action, those parameters are empirically
determined based on data from the quantitative view-
point. And, it is obvious that the smaller t is prefer-
able since it provides the earlier prediction; on the
contrary, t = 0 means on time classification and does
not give any prediction at all.
3 EXPERIMENTS
This section shows the experimental procedure for
determining the parameters {t, D} in the proposed
method (section 2.2) as well as evaluating it.
3.1 Dataset
The dataset that we use contains 57 video sequences
of 12 children captured by a (fixed) video camera with
30 fps in a gymnasium (fig. 3).
1
Children behave
unpredictably in context and thus are regarded as the
subjects to be carefully paid attention. They first walk
1
This experiment is approved by the Ethical Review
Board of Mazda Motor Corporation and the informed con-
sent of all subjects were also obtained.
NCTA 2015 - 7th International Conference on Neural Computation Theory and Applications
100

x
Figure 1: Static image feature extraction by using GLAC method (Kobayashi and Otsu, 2008). The bounding box is partitioned
into 3 × 3 regular grids at each of which GLAC image feature is extracted.
x =
w’x = y
Figure 2: Action prediction framework. We consider T -frame subsequence as a unit. The action of running at t = 0 is
predicted by using D-frame features preceding it.
Figure 3: Example sequence in dataset and extracted samples.
and then suddenly run in an arbitrary timing. The
bounding boxes enclosing them are manually anno-
tated since the pedestrian detection is out of our focus
in this study. In addition, the frame when the subject
starts running is also manually indicated; it is denoted
as t
run
(fig. 3). The length of the subsequence is set
to T = 20, since all the subjects of 57 sequences are
definitely walking at the frame of t
run
−19; so the sign
Pedestrian Action Prediction using Static Image Feature
101

Timing t
-19 -15 -11-10 -7 -5 0
Accuracy (%)
50
60
70
80
90
Figure 4: Classification performance of one frame duration D = 1.
Duration D
1 5 10 15 20
Timing t
-19
-15
-10
-5
0
50
60
70
80
90
95
Accuracy (%)
Figure 5: Classification performance for all parameter pairs.
preindicating running is supposed to exist within this
period from t
run
− 19 to t
run
.
The subsequence of 20 frames that ends at t
run
is
regarded as a positive sample in each subsequence,
while negative samples are determined as all the other
subsequences except the ones overlapping the positive
subsequence with over 10 frames. We thereby obtain
one positive sample and about 50 to 100 negative sam-
ples from each sequence.
3.2 Evaluation
The prediction performance is measured by leave-
one-sequence-out cross validation, the procedure is
defined as follows. At the i-th iteration (i = 1,..,57),
we train the linear SVM classifier (Vapnik, 1998) over
the samples excluding the ones drawn from the i-th
sequence. Then, the samples from the i-th sequence
are evaluated by applying the classifier. In this case,
those evaluated samples are highly imbalanced due to
NCTA 2015 - 7th International Conference on Neural Computation Theory and Applications
102

Timing t
-19 -15 -11-10 -7 -5 0
Accuracy (%)
50
60
70
80
90
100
Figure 6: Classification performance for timing t with maximizing over D.
Timing t
-19 -18 -16 -14 -12 -11 -10 -8 -6 -4 -2 0
Accuracy (%)
50
55
60
65
70
75
80
85
90
95
100
D=2, Max=89.5
D=3, Max=91.2
D=8, Max=93.0
Figure 7: Classification performance for duration D = 2, 3,8.
containing only one positive sample. Therefore, we
regard the i-th sequence as correctly classified only
when all the sample of that sequence are successfully
classified, which is a relatively hard criterion. In an
overall evaluation, we measure the ratio of the cor-
rectly classified sequences out of 57 ones.
As to the prediction method (sec.2.2), we exam-
ined 210 pairs of {t,D} parameters: considering T =
20, the prediction timing t varies from 0 to -19, and
accordingly the period D can be changed from 1 to
t + 20.
4 EXPERIMENTAL RESULTS
Figure 4 shows the classification performance for one
frame duration (D = 1). We can see that the top ac-
curacy was obtained at t = −11 and −7. This result
suggests that the frames at t = −11 and −7 include
distinctive features to preindicate running. It should
be noted that though this task is to predict the running
action at t = 0, the performance at t = 0 (on-time clas-
sification) is not high. This is because the pedestrians
definitely run at t = 0 and some negative samples also
contain the running action at t = 0, making hard to
classify at t = 0.
Figure 5 shows the results for all parameter pairs
of {t, D}. The best accuracy 96.5% was attained at
t = −3 with D = 14,16 and t = −2 with D = 18; the
whole sequence (t = 0,D = 20) did not perform the
best, exhibiting 94.7%. However, t = −2 and t = −3
are not preferable for our purpose, early prediction.
As shown in fig. 4, the distinctive features are
found at t = −7 and −11, and thus we can push back
Pedestrian Action Prediction using Static Image Feature
103
t
R0
t
R1
t
run
Figure 8: Biomechanical analysis for transition from walking to running.
t
R0
! t
run
-1 -0.8 -0.6 -0.4 -0.2 0
0
5
10
15
20
25
30
35
40
45
(a) t
R0
t
R1
! t
run
-1 -0.8 -0.6 -0.4 -0.2 0
0
5
10
15
20
25
30
35
40
45
50
(b) t
R1
Figure 9: Histogram for t
R0
and t
R1
compared to t
run
the prediction earlier. For early prediction, the timing
t is rather important than the duration D, and we show
in fig. 6 the best performance at each t by picking up
the maximum accuracy over D. It apparently shows
that the performance is saturated at t = −11, slightly
increasing after t = −11; for example, 93.0% is at-
tained at t = −10 with D = 8 which is close to the
best 96.5% at t = −3. However, a pedestrian has to
be tracked through 8 frames for the duration D = 8,
which is not preferable for on-board (moving) cam-
eras. Figure 7 shows the classification accuracy and
timing with the duration D = 2,3 and 8. 91.2% is
attained at t = −11 with D = 3 which requires only
3 frame duration. Thus, we can conclude that it is
possible to predict the action of running at about 0.37
sec. earlier (corresponding to t = −11) with over 90%
accuracy. Moreover, if we can compromise with the
classification accuracy of 89.5%, the running action
can be predicted at about 0.4 sec. earlier (t = −12) by
using only 2 frame duration.
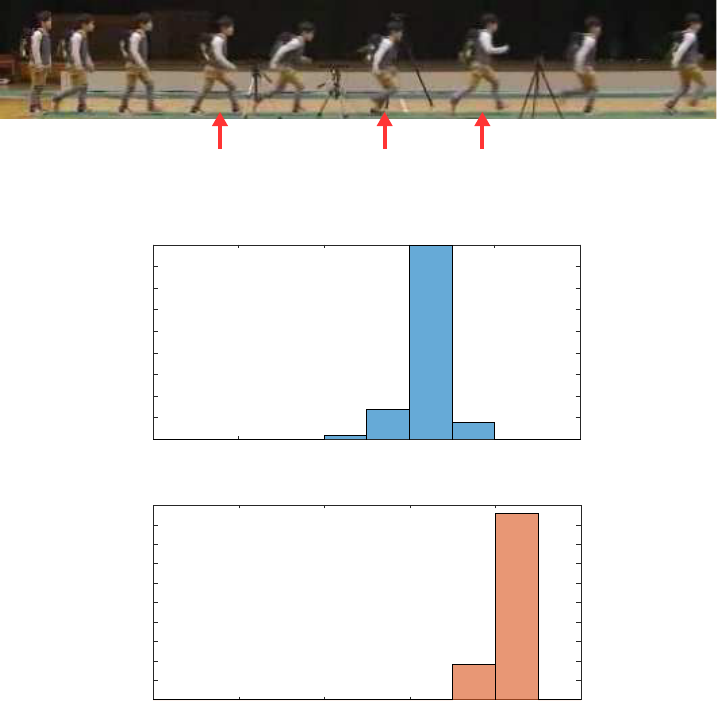
5 BIOMECHANICAL ANALYSIS
During the transition from walking to running, the vi-
sually most distinctive form is found when the head
reaches the minimum height. After that, the pedes-
trian jumps up a little bit and subsequently the phase
is completely changed into running. We call this point
as t
R1
(see fig. 8). On the other hand, when a pedes-
trian starts running from walking, the form accord-
ingly changes in order to facilitate its acceleration.
At that point, the pedestrian’s posture is learning for-
ward as well as stepping and shaking the arms more
largely. This point is denoted as t
R0
(see fig. 8). The
form at t
R0
is less salient compared to that at t
R1
, but
t
R0
precedes t
R1
. For comparing the above results
(section 4) to these biomechanically distinct points,
NCTA 2015 - 7th International Conference on Neural Computation Theory and Applications
104

we manually annotated t
R0
and t
R1
in the sequences.
The histograms for those timing points are shown
in fig 9. Those timing points are not diverse across
the pedestrians but relatively concentrated around the
means. This result shows that those distinct points
defined from the biomechanical viewpoint are also
regarded as general measure for predicting running
action. Those means are
¯
t
R0
= t
run
− 0.37 sec. and
¯
t
R1
= t
run
− 0.19 sec., corresponding to t = −11 and
t = −6, respectively. These are surprisingly coinci-
dent with the points t = −11 and −7 which are qual-
itatively obtained in fig. 4. Thus, we have shown that
those quantitatively obtained timing points are biome-
chanically meaningful.
6 CONCLUSION
We have proposed a method to predict the running
action of pedestrians at earlier timing before the ac-
tion actually occur. The method is based on the
appearance-based image features to extract distinc-
tive forms of the pedestrian in transition from walk-
ing to running. In addition, the motion information is
naively encoded via aggregating (concatenating) the
consecutive frame features in time series sequence,
with the two important parameters which indicate
the timing and duration, respectively. In the experi-
ments, we empirically determined those two param-
eters, showing favorable performance of prediction;
the running action can be predicted at about 0.4 sec
before. By further analyzing the postures from the
viewpoint of biomechanics, the prediction timing is
shown to be closely related to biomechanically dis-
tinct form. The experiments performed in this pa-
per are limited due to such as indoor and fixed cam-
era. Our future works include to apply the proposed
method to the movie which is captured in more real-
istic situations.
REFERENCES
T.Ishikawa: The analysis of pedestrian acci-
dents. https://www.itarda.or.jp/ws/pdf/h22/13 01
hokousyaziko.pdf in japanese
Dalal, N., Triggs, B.: Histograms of oriented gradients for
human detection. In: IEEE Conference on Computer
Vision and Pattern Recognition. pp. 886–893 (2005)
Hulshof, W., Knight, I., Edwards, A., Avery, M., Grover,
C.: Autonomous emergency braking test results. In:
International Technical Conference on the Enhanced
Safety of Vehicles (2013)
Keller, C.G., Gavrila, D.M.: Will the pedestrian cross? a
study on pedestrian path prediction. IEEE Transaction
on Intelligent Transportation Systems 15(2), 494–506
(2014)
Kobayashi, T., Otsu, N.: Image feature extraction using
gradient local auto-correlations. In: European Confer-
ence on Computer Vision. pp. 346–358 (2008)
Ouyang, W., Wang, X., Zeng, X., Qiu, S., Luo, P., Tian,
Y., Li, H., Yang, S., Wang, Z., Loy, C.C., Tang, X.:
Deepid-net: Deformable deep convolutional neural
networks for object detection. In: IEEE Conference on
Computer Vision and Pattern Recognition. pp. 2403–
2412 (2015)
Reddy, Y., Krishnaiah, R.: Driving assistance system for
identification of sudden pedestrian crossings. Interna-
tional Journal of Research in Information Technology
1(12), 281–295 (2013)
Rosen, E., Sander, U.: Pedestrian fatality risk as a function
of car impact speed. Accident Analysis and Prevention
41, 536–542 (2009)
Vapnik, V.: Statistical Learning Theory. Wiley (1998)
Pedestrian Action Prediction using Static Image Feature
105
