Towards Finding an Effective Way of Discrete Problems Solving: The
Particle Swarm Optimization, Genetic Algorithm and Linkage
Learning Techniques Hybrydization
Bartosz Andrzej Fidrysiak and Michal Witold Przewozniczek
Department of Computational Intelligence, Wroclaw University of Technology, Wroclaw, Poland
Keywords: PSO for Binary Problems, Genetic Algorithms, Coevolution, Deceptive Functions, Linkage Learning.
Abstract: Particle Swarm Optimization (PSO) and Genetic Algorithms (GA) are well known optimization tools. PSO
advantage is its capability for fast convergence to the promising solutions. On the other hand GAs are able
to process schemata thanks to the use of crossover operator. However, both methods have also their
drawbacks – PSO may fall into the trap of preconvergence, while GA capability of fast finding locally
optimal (or close to optimal) solutions seems low when compared to PSO. Relatively new, important
research direction in the field of Evolutionary Algorithms is linkage learning. The linkage learning methods
gather the information about possible gene dependencies and use it to improve their effectiveness. Recently,
the linkage learning evolutionary methods were shown to be effective tools to solve both: theoretical and
practical problems. Therefore, this paper proposes a PSO and GA hybrid, improved by the linkage learning
mechanisms, dedicated to solve binary problems. The proposed method tries to combine the GA schema
processing ability, linkage information processing and uses fast PSO convergence to quickly improve the
quality of already known solutions.
1 INTRODUCTION
Particle Swarm Optimization (PSO), proposed in
(Eberhart and Kennedy, 1995) is a popular
optimization technique, commonly used as a base
for proposals of methods designed to solve hard
computational problems (Baek et al., 2015; Liu
2015; Lim and Isa 2014; Moubayed et al., 2014; Xua
et al. 2015). Usually, the problems solved by PSO-
based methods use the floating-point problem
encoding. One of the PSO advantages is its
capability of reaching fast convergence speed. For
instance, in (Baek et al. 2015; Lim and Isa 2014; Liu
2015; Moubayed, et al. 2014) a stop condition is in
range of 3100 up to 4.5 *10
5
fitness function
evaluations (FFE) and is low when compared to
GAs (Kwasnicka et al., 2015). A detailed analysis of
PSO convergence speed and swarm diversity
preservation can be found in (Bergh 2010). On the
other hand the classical PSO analyses the
dependencies between particles in the topological
way – no schemata or Building Blocks (BB)
(Goldberg et al., 1993) are neither found nor
processed. The lack of BB processing and exchange
mechanisms might limit the genotype-based method
capability of solving hard discrete problems
(Thierens 1999). Therefore the possible application
of PSO-based methods to solve hard combinatorial
problems like the Travelling Salesman Problem
(TSP) (Rani and Vikas 2014), or the network flow
optimization problems (Przewozniczek et al., 2015;
Rani and Vikas 2014; Walkowiak et al., 2013)
seems to be limited.
The Genetic Algorithm (GA) is a base of many
methods designed to solve hard optimization
problems of discrete nature (Andrade at al., 2015;
Przewozniczek et al. 2015; Walkowiak et al., 2013).
Even the simple Genetic Algorithm (sGA) is able to
find, populate and exchange the BBs (Thierens
1999). The computational problem, when encoded
with the use of genotype, is, at least partially, built
from the groups of genes highly dependent on each
other. Finding BBs and exchanging them between
individuals opens the way for reaching the
breakthrough and finding the solutions of a very
good quality (Watson et. al. 1998). On the base of
the BB theory, the linkage learning techniques were
identified and their classification was proposed
228
Fidrysiak, B. and Przewozniczek, M..
Towards Finding an Effective Way of Discrete Problems Solving: The Particle Swarm Optimization, Genetic Algorithm and Linkage Learning Techniques Hybrydization.
In Proceedings of the 7th International Joint Conference on Computational Intelligence (IJCCI 2015) - Volume 1: ECTA, pages 228-236
ISBN: 978-989-758-157-1
Copyright
c
2015 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
(Chen et al. 2007b). Linkage learning methods
gather the information about possible dependencies
between genes and use this information to improve
their effectiveness. Linkage learning methods have
proven to be effective against both: theoretical
(Correa and Shapiro 2006; Kwasnicka and
Przewozniczek, 2011; Laumanns and Ocenasek
2002; Pelikan et. al 2006;) and practical problems
(Przewozniczek et al. 2015; Walkowiak et al. 2013).
The above description has lead us to conclusion
that a method characterized by PSO’s fast
convergence speed (in which the PSO is used as a
kind of clever local optimizer) and GA’s capability
of BBs exchange enhanced by linkage learning
techniques has a potential to be an effective one.
Therefore this paper proposes a Multi-Swarm
Particle Optimization with Crossing (MSPOCk). In
the proposed method, PSO is used as an intelligent
semi-local optimization tool (thanks to its fast
convergence capability) and the GA crossover is
used to exchange BBs and is enhanced by the
linkage learning mechanism. The proposed method
may be especially useful for solving practical
problems, where mixed (discrete and floating point)
problem encoding is used (Walkowiak et al. 2013;
Przewozniczek et al. 2015). In such problems one
gene is represented by two values: discrete one and
floating point one. The method that is both: PSO-
and GA-based may turn out to be an effective tool
for solving such problems.
This paper is organized as follows. In section 2
the related work is presented. Section 3 contains the
detailed description of the proposed MSPOCk
method. The experiment setup, results of the
computational tests and detailed experiment results
analysis are placed in section 4. Finally, the last
section concludes this work.
2 RELATED WORK
Since the paper considers a number of different
Evolutionary Computation fields this section is
divided into the following subsections. In first, the
description of linkage learning techniques is
presented. Then, PSO propositions for solving the
discrete problems, available in the literature, are
presented. Third subsection presents the already
known GA and PSO hybrids, Finally, the last
subsection presents multi-population PSOs.
2.1 Linkage Learning Techniques
The classification of linkage learning methods was
proposed in (Chen et al. 2007b). The classification
concerns different method features. In order to
distinguish a bad linkage from a good one, method
may use only the fitness function (unimetric
approach) (Kwasnicka and Przewozniczek 2011;
Przewozniczek et al. 2015; Walkowiak et al. 2013).
If in addition to fitness function, the method uses
additional measures then such approach is called
multimetric.
Linkage information may be represented in two
different ways: virtual or physical. If the method
uses matrices, graphs, gene patterns (Kwasnicka and
Przewozniczek 2011) to represent linkage then the
virtual way is used. If linkage is represented as the
location of two or more genes in the chromosome
(the closer the genes are in the chromosome the
more dependent they are) then the linkage is
represented in the physical way. The good example
of physical linkage representation is the messy
coding (Goldberg et. al 1993; Kwasnicka and
Przewozniczek 2011; Przewozniczek et al. 2015;
Walkowiak et al. 2013), where genes may have any
position in the chromosome. Finally, linkage
information may be stored in some central database
or be distributed in a genetic-linkage model manner.
Some methods, like Multi Population Pattern
Searching Algorithm (MuPPetS) (Kwasnicka and
Przewozniczek 2011), may be assigned more than
one value to one linkage classification category. For
example MuPPetS use both possible linkage
representation approaches and both linkage storage
ways.
Usually, the linkage information is used by the
crossover operator. In this group the GA methods
may be found like MuPPetS (Kwasnicka and
Przewozniczek 2011, Przewozniczek et al. 2015,
Walkowiak et al. 2013) or DSMGA (Fan et al.).
Recently, an interesting study proposing the Hybrid
Linkage Crossover (HLX) operator and
incorporating it into the Differential Evolution was
presented (Cai and Wang, 2015).
It is worth noting that linkage learning methods
are successful in solving hard computational
problems of both kinds: theoretical like CEC 2005
(Cai and Wang, 2015) or deceptive functions
concatenations (Correa and Shapiro 2006;
Kwasnicka and Przewozniczek, 2011; Pelikan et. al
2006;) and large-scale practical problems
(Walkowiak et al. 2013; Przewozniczek et al. 2015).
2.2 Particle Swarm Optimization in
Solving Discrete Problems
To our best knowledge, the first PSO for discrete
Towards Finding an Effective Way of Discrete Problems Solving: The Particle Swarm Optimization, Genetic Algorithm and Linkage
Learning Techniques Hybrydization
229

problem optimization was proposed in (Kennedy
and Eberhart 1997), this method will be called
PSO_V1. Due to the problem nature, the particle
speed is interpreted differently than in a classical
PSO – it describes the probability that the particle
position in each dimension will be assigned the
value of 0 or 1. To calculate the particle position
value on the base of particle speed, the sigmoid
function presented in equation (1) is used.
y
e
ysig
−
+
=
1
1
)(
(1)
The use of sigmoid function to translate the particle
speed into the particle position allows for using the
same particle speed computation as in classical PSO.
To omit the problem of too high particle speeds, the
speed limit is used. Here, as in (Bergh 2010), the
speed limit is set on <-4; 4>. Finally, the ith particle
position in jth dimension is calculated as follows.
+<
+≥
=
))1((1
))1((0
,
,
,
tvsigrif
tvsigrif
x
ji
ji
ji
,
(2)
where r is a random number from [0;1] uniform
distribution. It is randomly generated each time, the
particle position at each dimension is generated.
The drawback of PSO_V1 is the unintuitive
speed interpretation. Therefore the PSO_V2
(Khanesar et al. 2007) was proposed. PSO_V2 is
another PSO-based method for discrete (binary)
problem solving. In PSO_V2 two particle speeds are
used: the first one describes the probability to
change the position value from 0 to 1, while the
second is opposite. The speeds are defined as
follows.
)0(
2,,
)0(
1,,
)0(
,
)0(
,
)()1(
jijijiji
ddtvtv ++=+
λ
,
(3)
where
−
=
pp
pp
ji
rc
rc
d
)0(
1,,
1
0
,
,
=
=
best
ji
best
ji
xif
xif
−
=
gg
gg
ji
rc
rc
d
)0(
2,,
1
0
=
=
best
j
best
j
gif
gif
)1(
2,,
)1(
1,,
)1(
,
)1(
,
)()1(
jijijiji
ddtvtv ++=+
λ
,
(4)
where
−
=
pp
pp
ji
rc
rc
d
)1(
1,,
1
0
,
,
=
=
best
ji
best
ji
xif
xif
−
=
gg
gg
ji
rc
rc
d
)1(
2,,
1
0
=
=
best
j
best
j
gif
gif
where v
i,j
is the ith particle speed in jth dimension, t
is the iteration number, λ is the inertia weight, c
p
and
c
g
are positive constants, r
p
and r
g
are random
number from [0;1] uniform distribution, x
i,j
is the ith
particle position in jth dimension, x
i,j
best
and g
j
best
are
particle and global swarm optima found that far.
2.3 Genetic Algorithm and Particle
Swarm Optimization Hybrids
The GA and PSO work in different ways and have
different advantages and disadvantages. These
differences make them good candidates for
hybridization. Some PSO and GA hybrids were
already proposed (Chen et al. 2007; Devicharan and
Mohan 2004, Lovbjerg et al. 2001). In (Chen et al.
2007) the combination of crossover and selection
operator, PSO mechanisms and the linkage learning
are proposed. At the beginning of the method, the
PSO proposed in (Mu et al. 2009) is used. Then, the
groups of dependent genes are generated randomly.
For example the randomly generated gene group
may contain gene positions 2, 5 and 6 of 10-bit
problem. As long as the average population fitness
improves fast enough, the dependent gene groups
remain, otherwise they are reinitialized. Note that
such linkage learning mechanism is primitive and
may occur ineffective.
2.4 Particle Swarm Optimization as a
Multi-Population Method
Similarly to other evolutionary methods PSO may be
modified to become a multi-population method. The
good example may be found in (Chang, 2015),
where PSO’s original single swarm is divided into a
number of subswarms. Such a multi-swarm PSO is
used to solve multimodal problems. However, the
proposed method does not incorporate any
subswarm communication. A more evolved multi-
swarm PSO was presented in (Dahzi et al. 2008).
After a certain number of generations, the
neighbouring subswarms exchange their globally
best positions found that far. The Multi-Swarm
Cooperative Particle Swarm Optimizer (MCPSO)
was presented in (Niu et al. 2007). In MCPSO the
subswarms are not equal. One of them is the master
swarm, while the other are called slaves. The slave
swarms are executed independently, their role is to
preserve the particles diversity and support the
master swarm with knowledge they are able to
ECTA 2015 - 7th International Conference on Evolutionary Computation Theory and Applications
230

gather. Master swarm use its own knowledge and the
information it is able to possess from slave swarms
to improve the overall method effectiveness.
3 THE PROPOSED HYBRID
As stated in section 2.3, the GA and PSO hybrid
proposed in (Chen et al. 2007) may be easily
adjusted to solve binary problems. It is enough to
exchange the standard PSO from (Mu et al. 2009)
for PSO_V2. However, such a hybrid will have a
significant drawback. Since all the particles know
the best solution found by a method that far it is
likely that many particles will converge to this
solution. Therefore, in this section, a new GA and
PSO hybrid improved by linkage learning
mechanisms is proposed. In the proposed Multi-
Swarm Particle Optimization with Crossing
(MSPOCk), PSO_V2 is used only as fast, quasi local
optimizer. From this point of view, the very fast
PSO convergence is a positive feature (even if it
leads directly to preconvergence). In order avoid the
preconvergence, a number of PSO swarms are
executed separately and in parallel. These swarms
should converge to different solution space parts. In
order to exchange the information between the best
solutions found by the coevolving swarms, the
dedicated crossover operator is used and enforced
with linkage learning. If some of the subswarms start
to explore the same or similar solution space regions
then only one of these subswarms is left unchanged,
the rest is reinitialized. Note that such a way of
preserving the population diversity is not typical for
PSO-based methods. The usual way is to change the
population topology from global best, to local best
(Kennedy and Mendes 2006). In the MSPOCk
method the global best topology is used but only
within single subswarm.
3.1 General Method Overview
The general MSPOCk method overview, for P
particle subpopulations is presented in Figure 1.
The population initialization is done randomly for all
the particles. Before execution of PSO for each
subswarm, the check if subswarms are not too
similar is done. If some subswarms explore the same
or very similar solution space parts only one of them
is left, the other are reinitialized in order to give
them a chance to explore different solution space
parts. This operation preserves population diversity.
In order to choose which subswarms should be
reinitialized, the similarity measure of two
subswarms is defined and presented in equation (5).
t=0;
InitializePopulation();
While(!StopCondition)
Begin
ReinitializeSimilarSubswarms();
for(int p = 0; p < P; p++)
Run PSO_V2 for pth subswarm;
UpdateLinkageInformation();
CrossParticles();
t = t+1;
End of while;
Figure 1: MSPOCk pseudocode.
=
−=
n
j
best
jy
best
jxyx
ggGGd
1
,,
),(
,
(5)
where G
x
,G
y
are xth and yth subswarms respectively,
and the g
x,j
best
, g
y,j
best
, are the jth dimension values of
the best solution found by xth and yth subswarm
respectively.
The similarity check is done for all possible
subswarm pairs. If any two subswarms are more
similar than a user defined value D then the
subswarm with lower g
p
best
value is reinitialized.
3.2 New Particle Population Creation
on the Base of Crossover
In the particle creation phase, new particles, created
by crossover operation, replace the old ones. The
parents are chosen randomly with equal probability
from k best individuals of each subswarm. Note, that
except the incorporation of elitism, such a procedure
is close to the tournament selection idea. Such
method construction helps to preserve the population
diversity. This feature is also enforced by the
previously described subswarm reinitialization
procedure.
Before crossing, the linkage information is
updated. If this operation is done for the first time
every gene is randomly assigned to one of the two
gene groups: group A or group B. If the linkage
information update is done later then the current
gene groups are preserved, if the average population
fitness has increased. Otherwise the gene groups are
reinitialized.
When two parents are chosen the crossover
operator is used to generate offspring. The crossover
operator exchange genes marked by the current gene
exchange pattern. To create one offspring genes
from group A are taken from parent A and genes
from group B are taken from parent B. For example,
Towards Finding an Effective Way of Discrete Problems Solving: The Particle Swarm Optimization, Genetic Algorithm and Linkage
Learning Techniques Hybrydization
231
if the genotypes of parents A and B are: 111000110,
010101011, and the gene exchange pattern is
AAABBBAAB then the offspring genotype will be:
111 101 11 1. After crossing, for each subswarm, the
x
i
best
and g
p
best
are reinitialized with all the previous
history of found solutions cleaned. The particles
speeds are cleaned as well and are randomly
reinitialized.
Note that such linkage generation procedure is
similar to (Chen et al. 2007) and is still quite
primitive. Nevertheless it removes the gene order
dependency of single point crossover and allows for
significant method performance improvement if
good quality gene exchange pattern was created.
3.3 Proposed Method Summary
The proposed MSPOCk method is a multi-
population method which uses one of the main
weaknesses of PSO concept, namely the
preconvergence, as an advantage. The crossover
operator is used to transmit the genetic information
between fully separated and coevolving subswarms.
The mechanism of subswarm reinitialization
introduces the idea of global mutation into the
method.
The MSPOCk method uses simple, but still
effective, linkage learning mechanisms to reinforce
the quality of crossover operator. The linkage
information is stored in a centralized way. All
methods considered here use unimetric way to
distinguish the good and bad linkage as it is based
only on fitness value.
It is worth noting that MSPOCk is completely
different to other multi-swarm PSOs presented in
section 2.4. First of all it incorporates a direct data
exchange between particles by the use of crossover
operator. Second, it uses linkage learning to improve
the crossover quality. Third, it reinitializes
subswarms if they get too close to each other.
Finally, the possible PSO preconvergence is used as
advantage, not a drawback.
4 THE RESULTS
In this section the results of the performed
experiments are presented. This section is organized
as follows. First, the test problems based on
deceptive functions concatenations are presented
(Deb and Goldberg, 1992). In the second subsection
the tuning procedure and its results for all the
competing methods are presented. The third
subsection describes and discusses the main results.
The competing methods are: PSO_V1, PSO_V2,
GA+PSO (GA and PSO hybrid from (Chen et al.
2007) with PSO_V2 used) and MSPOCk. All
methods were coded in C++ in Qt 5.1.1 (MSCV
2010, 32-bit). The complete sourcecodes, results and
summaries may be downloaded from:
http://www.mp2.pl/download/ai/20150617_mspock.
zip. All the test runs were executed on Intel Core i7-
3632QM machine with 64-bit Windows 7 on board.
Each method was executed 5 times for each test
case. In order to make the results reliable, all the
methods shared the parts of code whenever it was
possible and all experiments were executed in clean
system environment with no other resource
consuming processes running.
4.1 The Deceptive Functions
Concatenations
In the performed experiments the deceptive
functions concatenations were used as a test
problems. The deceptive functions were proposed in
(Deb and Goldberg, 1992) and are a common test
tool for methods that use the binary coding. The
deceptive function value is based on its unitation.
The unitation of a binary string is a number of ‘1’s
in the string. The function value increase as its
unitation is decreasing, but the function value is
optimal only for the maximal unitation. Therefore,
the optimization methods are often misled to the
suboptimal solutions characterized with low
unitation.
The concatenations of deceptive functions are
hard to solve for any method that does not have
mechanisms based on the prior knowledge about
deceptive function nature. Usually, the test cases are
just concatenation of identical order-3 up to order-5
deceptive functions. Here, the test cases used, are
more diverse in order to better imitate the real life
problems. In other words – it seems doubtful that a
real life problem will be built from the identical
subproblems. It seems also reasonable that a real life
problem may contain a part that is easy to solve for
any GA-based method (Kwasnicka and
Przewozniczek). Therefore the test cases are the
concatenation of four different deceptive functions,
presented in Table 1 and the tail function given in
equation (6).
luxf
tail
/)( = ,
(6)
where u is the argument unitation, and l is a bit
number.
ECTA 2015 - 7th International Conference on Evolutionary Computation Theory and Applications
232
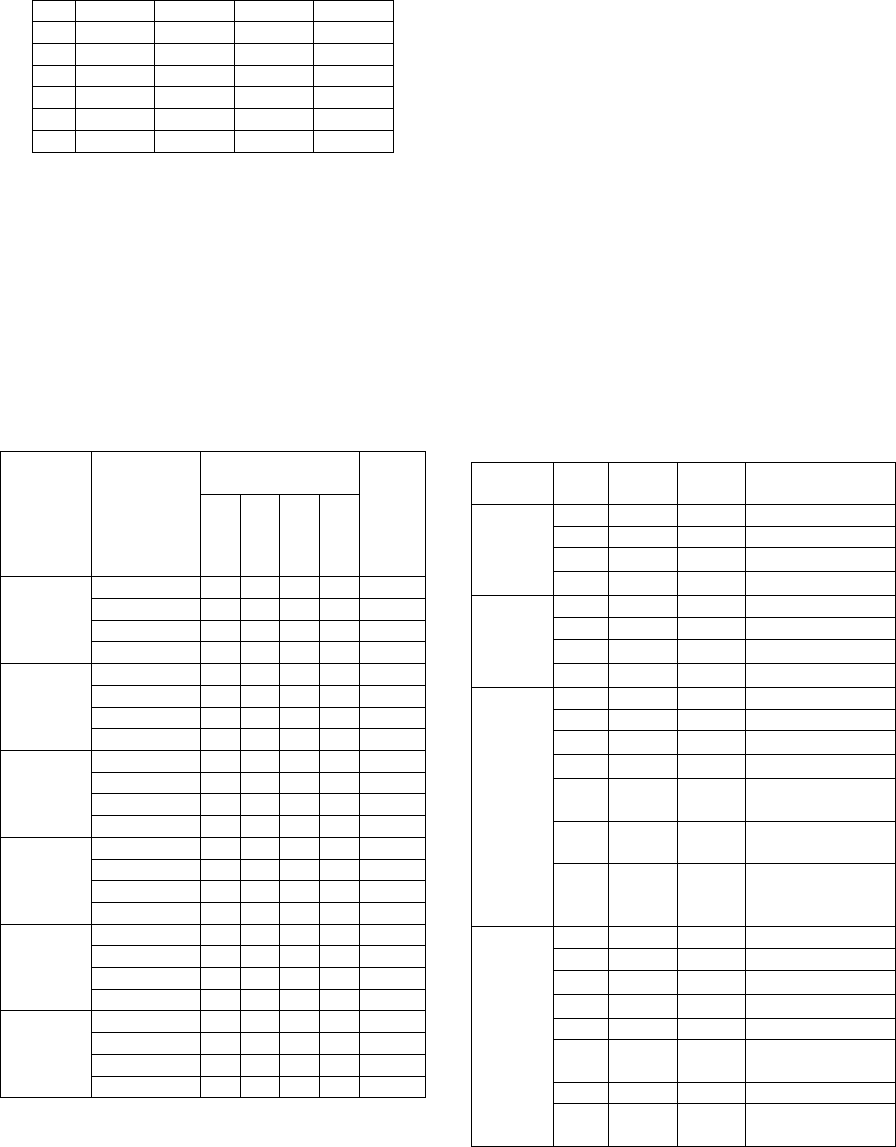
Table 1: Deceptive functions used for tests.
u 3a 3b 5a 5b
0 0.900 9.000 0.900 9.000
1 0.45 4.500 0.675 6.750
2 0.000 0.000 0.450 4.500
3 1.000 10.000 0.225 2.250
4 N/A N/A 0.000 0.000
5 N/A N/A 1.000 10.000
The concatenations of the functions presented above
were made in four different versions: flat, flat+tail,
rough, rough+tail. The flat test cases were built
from deceptive functions with the same maximum
value (only 3a and 5a functions), while rough are the
concatenation of functions with different maximum.
In addition, to some of the test cases, the tail
function was added to imitate the fact that some part
of the real life problem may be fairly easy to solve.
The list of used test cases is given in Table 2.
Table 2: The test cases used in the experiments.
Deceptive
functions
total len.
(order of
functions
used)
Version
Deceptive
function number
Tail
length
3a 3b 5a 5b
30
(3 and 5)
Flat 5 0 3 0 0
Flat+tail 5 0 3 0 30
Rough 3 2 2 1 0
Rough+Tail 3 2 2 1 30
30 (5)
Flat 0 0 6 0 0
Flat+tail 0 0 6 0 30
Rough 0 0 3 3 0
Rough+Tail 0 0 3 3 30
50
(3 and 5)
Flat 10 0 4 0 0
Flat+tail 10 0 4 0 50
Rough 5 5 2 2 0
Rough+Tail 5 5 2 2 50
50(5)
Flat 0 0 10 0 0
Flat+tail 0 0 10 0 50
Rough 0 0 5 5 0
Rough+Tail 0 0 5 5 50
150
(3 and 5)
Flat 30 0 12 0 0
Flat+tail 30 0 12 0 150
Rough 15 15 6 6 0
Rough+Tail 15 15 6 6 150
150 (5)
Flat 0 0 30 0 0
Flat+tail 0 0 30 0 150
Rough 0 0 15 15 0
Rough+Tail 0 0 15 15 150
Note, that similar test case generation was proposed
in (Kwasnicka and Przewozniczek, 2011). The genes
in the concatenations were not shuffled since all
competing methods are not gene order dependent,
which is a desired feature for any method that uses
genotype-based problem coding.
4.2 The Tuning Procedure
Finding the optimal parameter settings for the
competing methods, does not seem possible due to
practical reasons. Therefore the tuning procedure
was as follows. First, the initial settings for each
method were proposed on the base of authors
experience and literature review. Second, each
parameter was separately tuned in an order presented
in Table 3. For each parameter, a range of values
was checked and the best was chosen for further use.
The final parameter settings, with their initial values
are given in Table 3. The values
λ, c
p
and
c
g
for
GA+PSO and MSPOCk methods were copied from
the final values tuned for PSO_V2. The maximum
computation time was 3000 seconds for all methods.
Table 3: Tuning results.
Method Par. Initial
value
Final
value
Par. description
PSO
V1
N 1000 400 Population size
λ 1 0.99 Inertia weight
c
p
2 1.81
As in eq.
(3), (4)
c
g
2 1.50
As in eq.
(3), (4)
PSO
V2
N 1000 700 Population size
λ 1 0.87 Inertia weight
c
p
2 2.00
As in eq.
(3), (4)
c
g
2 1.86
As in eq.
(3), (4)
GA
+
PSO
N 1000 100 Population size
λ 0.87 0.87 Inertia weight
c
p
2.00 2.00
As in eq.
(3), (4)
c
g
1.86 1.86
As in eq.
(3), (4)
l
max
200 60
PSO iteration
number
k 0.25 0.27
% of best particles
used for crossover
ε 0.01 0.05
Min. avr. fitness
increase to stay
with cur. linkage
MSPO
Ck
N 1000 1000 Population size
λ 0.87 0.87 Inertia weight
c
p
2.00 2.00
As in eq.
(3), (4)
c
g
1.86 1.86
As in eq.
(3), (4)
l
max
200 160 PSO iter. num.
k 0.25 0.05
% of best particles
used for crossover
P 25 25 Subswam number
S 0.95 1.0
Min. subswarm
similarity
Towards Finding an Effective Way of Discrete Problems Solving: The Particle Swarm Optimization, Genetic Algorithm and Linkage
Learning Techniques Hybrydization
233
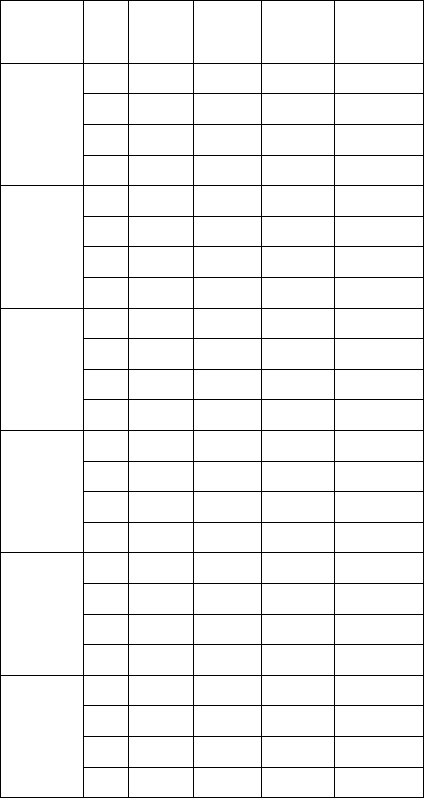
4.3 Main Results
The main measure of the result quality in the
performed tests is the function unitation – the higher
number of ‘1’s, the closer the solution is to the
optimum. Note, that sometimes the function value
difference may be relatively small, while the
difference in unitation will be very large. The
method capable of finding solutions with high
unitation is expected to be more capable of leaving
the local optima areas and less likely to stuck.
Therefore, such a method should be more useful for
solving hard computational problems (Kwasnicka
and Przewozniczek, 2011). The average unitation for
all the competing methods is given in
Table 4.
Table 4: Average untiation for each experiment group.
Test case
group Ver.
PSO
V1
[%]
PSO
V2
[%]
GA+
PSO
[%]
MSPOCk
[%]
30
(3 and 5)
r 96.67 76.67
100.00 100.00
r + t 98.33 88.33 95.00
100.00
f 93.33 66.67
100.00 100.00
f + t 96.67 86.67 93.33
100.00
30
(5)
r 93.33 60.00
100.00 100.00
r + t 93.33 78.33 93.33
100.00
f 90.00 70.00
100.00 100.00
f + t 91.67 83.33 93.33
100.00
50
(3 and 5)
r 90.00 82.00 92.00
100.00
r + t 97.00 89.00 90.00
100.00
f 80.00 72.00 88.00
100.00
f + t 94.00 87.00 83.00
100.00
50
(5)
r 82.00 52.00 74.00
100.00
r + t 92.00 77.00 77.00
100.00
f 74.00 40.00 54.00
100.00
f + t 78.00 70.00 63.00
100.00
150
(3 and 5)
r 68.00 69.33 68.00
74.00
r + t
86.00
85.00 83.33 84.33
f 65.33 70.00 68.67
71.33
f + t 84.33
85.00
83.67 82.67
150
(5)
r 26.00 23.33 26.00
40.00
r + t 61.33 61.00 63.00
69.67
f 14.00 22.00 18.67
42.67
f + t 56.00 61.00 56.67
69.67
As shown in Table 4, the proposed MSPOCk
method outperforms all the competing methods. It
was the best for 22 of 24 test problems. For the
shorter test cases the MSPOCk is able to report
perfect results in every run, for the 150-bit problems
the MSPOCk supremacy is still significant, but the
unitation rate significantly drops down. Both binary
PSO versions are able to propose reasonable results,
but of significantly lower quality than MSPOCk.
The MSPOCk advantage over the other methods is
smaller for the longest problems built from mixed
deceptive blocks of different size. It seems that these
problems are hard enough to deceive all methods
equalizing their quality. In all other problem groups
MSPOCk has clear advantage over the competing
methods (except the shortest problems, where
GA+PSO is sometimes also able to gain optimal
results in all runs). Note that the obtained results
indicate the importance of building deceptive
function concatenations also from blocks of mixed
size, not only identical ones.
For both PSO and MSPOCk, the unitation
increases if the problem is added a tail. This
observation is an expected one – for any PSO- or
GA-based method it is easy to optimize the tail-like
functions. In the case GA+PSO the situation is
sometimes opposite (for both 30-bit problems and
one 50-bit). The reason of this phenomenon is that
the more bits are necessary to encode the problem,
the harder it is to randomly generate proper linkage
information, therefore the overall effectiveness of
GA+PSO drops down. Note, that GA+PSO
generates the linkage information in the most
primitive way – randomly. It seems clear that
without any other performance improving
mechanisms, such a method will not be able to
effectively solve hard problems. On the other hand,
although MSPOCk also use primitive linkage
information generation procedure, it uses a number
of different diversity preservation mechanisms and a
kind of global mutation operator (subswarm
reinitialization). Therefore, MSPOCk is able to
remain effective even if the linkage information
quality is, in general, low. Note, that thanks to the
population diversity, MSPOCk is able to leave the
local optima and continue the search for the global
one.
Differently to results presented in (Kwasnicka
and Przewozniczek, 2011), the competing method
effectiveness was not always dependent on function
type (rough/flat) and, if the dependency was
occurring, then better results were proposed to the
rough function type (eg. PSO_V1, PSO_V2 and
GA+PSO results for both 50-bit problems). This last
observation is partially opposite to the analysis
presented in (Kwasnicka and Przewozniczek, 2011).
ECTA 2015 - 7th International Conference on Evolutionary Computation Theory and Applications
234
The explanation of this phenomenon may be that for
rough functions it is easier for the method to
concentrate its computation effort on the more
valuable (measured in fitness function value)
problem parts first, which improves the method
effectiveness as it works like if it was solving a
sequence of many shorter problems instead of
single, but long one. In the flat problems case such
computation effort concentration is impossible since
all problem parts are equally valuable.
5 CONCLUSIONS AND FURTHER
WORK
In this paper, the new PSO and GA hybrid with
linkage learning mechanisms for solving the binary
problems was presented. The proposed MSPOCk
uses many coevolving subswarms in order to be able
to leave local optima. The main paper purpose was
to show that the combination of PSO fast
convergence, GA capability of exchanging groups of
genes via crossover operator reinforced with linkage
learning is the promising way for discrete problems
solving. The MSPOCk was significantly more
effective than all other competing methods. In some
of the test cases it was able to repetitively find the
optimal solution.
As stated above, this work is only the
presentation of the possible effectiveness potential
behind the GA and PSO hybrids application to
discrete problems. Therefore, the future work shall
concern most of the MSPOCk mechanisms
presented here:
The linkage learning mechanisms, similar to
(Kwasnicka and Przewozniczek, 2011;
Pelikan et al. 2006) shall be introduced into
the method. Such modification should
improve the method effectiveness.
The subswarm number should not be a method
parameter. It should be designated by the
method itself. The interesting idea is to use the
same or similar mechanisms as presented in
(Kwasnicka and Przewozniczek, 2011;
Przewozniczek et al. 2015; Walkowiak et al.
2013) were a number of coevolving
subpopulations change during the method run
and is dependent on the method state.
PSO_V2, used in MSPOCk, is unable to solve
other than binary problems. The future work
should concentrate on proposing PSO based
methods capable of solving any discrete
problem, not only binary one.
The proposed MSPOCk should be compared
on the base of wide experiment set with well
known, effective GA-based methods like
MuPPetS, BOA and hBOA.
The further study on MSPOCk should also
consider its application to hard practical problems.
REFERENCES
Andrade, C., Toso, R., Resende, M., Miyazawa, F., 2015,
Biased Random-Key Genetic Algorithms for the
Winner Determination Problem in Combinatorial
Auctions, In Evolutionary Computation, Vol. 23, No.
2: 279–307.
Baek,H., Ryu, J., Oh, J., Kim T., 2015, Optimal design of
multi-storage network for combined sewer overflow
management using a diversity-guided, cyclic-
networking particle swarm optimizer – A case study in
the Gunja subcatchment area, Korea, In Expert
Systems with Applications, Vol. 42, Issue 20, pp.
6966-6975.
Bergh F., 2010, An Analysis of Particle Swarm
Optimization. In Computer and Information Science,
Vol.3, no. 1, pp.180-184.
Cai, Y, Wang, Y., 2015, Differential evolution with hybrid
linkage crossover. In Information Sciences, Vol. 237,
pp. 244-287.
Chang, W.D., 2015, A modified particle swarm
optimization with multiple subpopulations for
multimodal function optimization problems. In
Applied Soft Computing, Vol. 33, pp. 170-182.
Chen, Y., Peng. W, Jian M., 2007, Particle Swarm
Optimization With Recombination and Dynamic
Linkage Discovery, In IEEE Transactions on Systems,
Man and Cybernetics, Part B: Cybernetics, Vol.37,
Issue 6, pp.1460-1470.
Chen, Y., Sastry, K., Goldberg, D.E., 2007b, A Survey of
Linkage Learning Techniques in Genetic and
Evolutionary Algorithms, In IlliGAL Report No.
2007014, Illinois Genetic Algorithms Laboratory.
Correa, E.S., Shapiro, J.L., 2006, Model Complexity vs.
Performance in the Bayesian Optimization Algorithm,
In Lecture Notes in Computer Science , Vol. 4193, pp.
998-1007.
Dahzi, W.., Wu, CH., Ip, W.H., Wang, D., Yan, Y., 2008,
Parallel multi-population Particle Swarm Optimization
Algorithm for the Uncapacitated Facility Location
problem using OpenMP. In IEEE Congress on
Evolutionary Computation.
Deb, K., Goldberg, D. E., 1992, Sufficient Conditions for
Deceptive and Easy Binary Functions, In Annals of
Mathematics and Artificial Intelligence, Vol. 10, pp.
385-408.
Devicharan, D., Mohan, C.K., 2004, Particle Swarm
Optimization with Adaptive Linkage Learning, In
Congress on Evolutionary Computation, Vol.1,
pp.530-535.
Towards Finding an Effective Way of Discrete Problems Solving: The Particle Swarm Optimization, Genetic Algorithm and Linkage
Learning Techniques Hybrydization
235
Eberhart, R. & Kennedy, J., 1995. A New Optimizer
Using Particle Swarm Theory. In Proceeding of, 6th
International Symposium on Micro Machine and
Human Science, pp.530-535.
Fan, K., Yu, T. Lee, J., 2013, Linkage learning by number
of function evaluations estimation: practical view of
building blocks. In Information Sciences, Vol. 230,
Issue 1, pp. 162–182.
Goldberg, D.E., Deb, K., Kargupta H., Harik, G., 1993,
Rapid, accurate optimization of difficult problems
using fast messy genetic algorithms, In Proceedings of
5th International Conference on Genetic Algorithms.
Kennedy, J. & Eberhart, R., 1997, A Discrete Binary
Version of the Particle Swarm Algorithm. In IEEE
International Conference on Systems, Man and
Cybernetics, Computational Cybernetics and
Simulation, Vol.5, pp.4104-4108.
Kennedy, J., Mendes, R., 2006, Neighborhood Topologies
in Fully-InformedandBest-Of-Neighborhood
ParticleSwarms, In IEEE Transactions on
Systems,Man,and Cybernetics, PartC: Applications
and Reviews, Vol. 36, Issue 4, pp.515-519.
Khanesar, M. A, Teshnehlab, M. & Shoorehdeli, M.A.,
2007, A Novel Binary Particle Swarm Optimization,
In Proceedings of the 15th Mediterranean Conference
on Control&Automation, pp.1-6.
Kwasnicka, H., Przewozniczek, 2011, M., Multi
Population Pattern Searching Algorithm: a new
evolutionary method based on the idea of messy
Genetic Algorithm, In IEEE Transactions on
Evolutionary Computation, Vol. 15 Issue 5, pp.715-
734.
Laumanns, M., Ocenasek, J., 2002, Bayesian Optimization
Algorithms for multi-objective optimization, In
Lecture Notes in Computer Science , Vol. 2439, pp.
298-307.
Lim, W.H., Isa, N., 2014, Bidirectional teaching and peer-
learning particle swarm optimization, In Information
Sciences, Vol. 280, pp. 111-134.
Liu, Q., 2015, Order-2 Stability Analysis of Particle
Swarm Optimization, In Evolutionary Computation,
Vol. 23, No. 2, pp. 187–216.
Lovbjerg, M., Rasmussen, T. K., Krink, T., 2001, Hybrid
Particle Swarm Optimiser with Breeding and
Subpopulations, In Proceedings of the Genetic and
Evolutionary Computation Conference, Vol.24,
pp.469-476.
Moubayed, N., Petrovski, A., McCall, J., 2014,
D2MOPSO: MOPSO Based on Decomposition and
Dominance with Archiving Using Crowding Distance
in Objective and Solution Spaces, In Evolutionary
Computation, Vol. 22, No. 1, pp. 47–77.
Mu, A.Q., Cao, D.X., Wang, X.H., 2009, A Modified
Particle Swarm Optimization Algorithm, In Natural
Science, Vol.1, No. 2, pp. 151-155.
Niu, B., Zhu, Y., He, X., Wu, H., 2007, MCPSO: A multi-
swarm cooperative particle swarm optimizer, In
Applied Mathematics and Computation, Vol. 185, pp.
1050-1062.
Pelikan, M., Sastry, K., Butz, M.V., Goldberg, D.E., 2006,
Hierarchical BOA on Random Decomposable
Problems, In
MEDAL Report No. 2006001.
Przewozniczek, M., Goscien, R., Walkowiak, K.,
Klinkowski, M., 2015, Towards Solving Practical
Problems of Large Solution Space Using a Novel
Pattern Searching Hybrid Evolutionary Algorithm -
An Elastic Optical Network Optimization Case Study,
In Expert Systems with Applications, Vol. 42, pp.
7781-7796.
Rani K., Vikas K., 2014, Solving Travelling Salesman
Problem Using Genetic Algorithm Based On Heuristic
Crossover And Mutation Operator, In International
Journal of Research in Engineering & Technology,
Vol. 2, Issue 2, pp. 27-34.
Thierens, D., 1999, Scalability problems of simple genetic
algorithms, In Evolutionary Computation, Vol. 7,
Issue 4, pp. 331-352.
Walkowiak, K., Przewozniczek, M., Pajak, K., 2013,
Heuristic Algorithms for Survivable P2P Multicasting,
In Applied Artificial Intelligence, Vol. 27, Issue 4, pp.
278-303.
Watson, R.A., Hornby, G.S., Pollack, J.B., 1998,
Hierarchical Building-Block Problems for GA
Evaluation, In Parallel problem solving from nature ,
pp. 97-106.
Xu, L., Wang, J., Li, Y, Li, Q., Zhang, X., 2015, Resource
allocation algorithm based on hybrid particle swarm
optimization for multiuser cognitive OFDM network,
In Expert Systems with Applications, Vol. 42, Issue 20,
pp. 7186–7194.
ECTA 2015 - 7th International Conference on Evolutionary Computation Theory and Applications
236
