
An Improved Single Node Genetic Programming for Symbolic
Regression
Ji
ˇ
r
´
ı Kubal
´
ık
1
and Robert Babu
ˇ
ska
1,2
1
Czech Institute of Informatics, Robotics, and Cybernetics, CTU in Prague, Prague, Czech Republic
2
Delft Center for Systems and Control, Delft University of Technology, Delft, The Netherlands
Keywords:
Genetic Programming, Single Node Genetic Programming, Symbolic Regression.
Abstract:
This paper presents a first step of our research on designing an effective and efficient GP-based method for
solving the symbolic regression. We have proposed three extensions of the standard Single Node GP, namely
(1) a selection strategy for choosing nodes to be mutated based on the depth of the nodes, (2) operators
for placing a compact version of the best tree to the beginning and to the end of the population, and (3) a
local search strategy with multiple mutations applied in each iteration. All the proposed modifications have
been experimentally evaluated on three symbolic regression problems and compared with standard GP and
SNGP. The achieved results are promising showing the potential of the proposed modifications to significantly
improve the performance of the SNGP algorithm.
1 INTRODUCTION
This paper presents a first step of our research on ge-
netic programming (GP) for the symbolic regression
problem. The ultimate goal of our project is to design
an effective and efficient GP-based method for solv-
ing dynamic symbolic regression problems where the
target function evolves in time. Symbolic regression
(SR) is a type of regression analysis that searches the
space of mathematical expressions to find the model
that best fits a given dataset, both in terms of accuracy
and simplicity
1
.
Genetic programming belongs to effective and ef-
ficient methods for solving the SR problem. Besides
the standard Koza’s tree-based GP (Koza, 1992) there
have been many other variants proposed that proved
to perform well on the SR problem. They include, for
instance, Grammatical Evolution (GE) (Ryan et al.,
1998) which evolves programs whose syntax is de-
fined by a user-specified grammar (usually a grammar
in Backus-Naur form). Gene Expression Program-
ming (GEP) (Ferreira, 2001) is another GP variant
successful in solving the SR problems. Similarly to
GE it evolves linear chromosomes that are expressed
as tree structures through a genotype-phenotype map-
ping. A graph-based Cartesian GP (CGP) (Miller and
Thomson, 2000), is a GP technique that uses a very
1
https://en.wikipedia.org/wiki/Symbolic regression
simple integer based genetic representation of a pro-
gram in the form of a directed graph. In its classic
form, CGP uses a variant of a simple algorithm called
(1 + λ)-Evolution Strategy with a point mutation vari-
ation operator. When searching the space of candi-
date solutions, CGP makes use of so called neutral
mutations meaning that a move to the new state is ac-
cepted if it does not worsen the quality of the current
solution. This allows an introduction of new pieces of
genetic code that can be plugged into the functional
code later on and allows for traversing plateaus of the
fitness landscape.
A Single Node GP (SNGP) (Jackson, 2012a),
(Jackson, 2012b) is rather new graph-based GP sys-
tem that evolves a population of individuals, each
consisting of a single program node. Similarly to
CGP, the evolution is carried out via a hill-climbing
mechanism using a single reversible mutation opera-
tor. The first experiments with the SNGP were very
promising as they showed that the SNGP significantly
outperforms the standard GP on various problems in-
cluding the SR problem. In this work we take the stan-
dard SNGP as the baseline approach and propose sev-
eral modifications to further improve its performance.
The goals of this work are to verify performance
of the SNGP compared to the standard GP on vari-
ous SR benchmarks and to investigate the impact of
the following three design aspects of the SNGP algo-
rithm:
244
Kubalík, J. and Babuška, R..
An Improved Single Node Genetic Programming for Symbolic Regression.
In Proceedings of the 7th International Joint Conference on Computational Intelligence (IJCCI 2015) - Volume 1: ECTA, pages 244-251
ISBN: 978-989-758-157-1
Copyright
c
2015 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
• a strategy for selection of the nodes to be mutated,
• a strategy according to which the nodes are or-
dered in the population,
• and a type of the local search strategy used to
guide the optimization process
The paper is organized as follows. In Section 2,
the SNGP algorithm is described. In Section 3, three
modifications of the SNGP algorithm are proposed.
Experimental evaluation of the modified SNGP and
its comparison to the standard SNGP and standard
Koza’s GP is presented in Section 4. Finally, Sec-
tion 5 concludes the paper and proposes directions for
the further work on this topic.
2 SINGLE NODE GENETIC
PROGRAMMING
2.1 Representation
The Single Node Genetic Programming is a GP sys-
tem that evolves a population of individuals, each
consisting of a single program node. The node can
be either terminal, i.e. a constant or a variable node,
or a function from a set of functions defined for the
problem at hand. Importantly, individuals are not en-
tirely distinct, they are interlinked in a graph structure
similar to that of CGP, with population members act-
ing as operands of other members (Jackson, 2012a).
Formally, a SNGP population is a set of N in-
dividuals M = {m
0
, m
1
, .. . , m
N−1
}, each individual
m
i
being a single node represented by a tuple m
i
=
hu
i
, f
i
, Succ
i
, Pred
i
, O
i
i, where
• u
i
∈ T ∪F is either an element chosen from a func-
tion set F or a terminal set T defined for the prob-
lem,
• f
i
is the fitness of the individual,
• Succ
i
is a set of successors of this node, i.e. the
nodes whose output serves as the input to the
node,
• Pred
i
is a set of predecessors of this node, i.e. the
nodes that use this individual as an operand,
• O
i
is a vector of outputs produced by this node.
Typically, the population is partitioned so that first
N
term
nodes, at positions 0 to N
term
− 1, are terminals
(variables and constants in case of the SR problem),
followed by function nodes. Importantly, a function
node at position i can use as its successor (i.e. the
operand) any node that is positioned lower down in
the population relative to the node i. This means that
for each s ∈ Succ
i
we have 0 ≤ s < i (Jackson, 2012a).
Similarly, predecessors of individual i must occupy
higher positions in the population, i.e. for each p ∈
Pred
i
we have i < p < N. Note that each function
node is in fact a root of a tree that can be constructed
by recursively traversing the successors until the leaf
terminal nodes.
2.2 Evolutionary model
In (Jackson, 2012a), a single evolutionary operator
called successor mutate (smut) has been proposed.
It picks one individual of the population at random
and then one of its successors is replaced by a refer-
ence to another individual of the population making
sure that the constraint imposed on the successors is
satisfied. Predecessor lists of all affected individuals
are updated accordingly. Moreover, all individuals af-
fected by this action must be reevaluated as well. For
more details refer to (Jackson, 2012a).
The evolution is carried out via a hill-climbing
mechanism using a smut operator and an acceptance
rule. The acceptance rule can have various forms. In
(Jackson, 2012a), it was based on fitness measure-
ments across the whole population, rather than on sin-
gle individuals. This means that once the population
has been changed by a single application of the smut
operator and all affected individuals have been reeval-
uated the new population is accepted if and only if the
sum of the fitness values of all individuals in the pop-
ulation is no worse than the sum of fitness values be-
fore the mutation. Otherwise, the modifications made
by the mutation are reversed. In (Jackson, 2012b) the
acceptance rule is based only on the best fitness in the
population. The latter acceptance rule will be used in
this work as well. The reason for this choice is ex-
plained in Section 3.4.
3 PROPOSED MODIFICATIONS
In this section, the following three modifications of
the SNGP algorithm will be proposed:
1. A selection strategy for choosing nodes to be mu-
tated based on the depth of the nodes.
2. Operators for placing a compact version of the
tree rooted in the best performing node to the be-
ginning and to the end of the population, respec-
tively.
3. A local search strategy with multiple mutations
applied in each iteration.
In the following text, the term ”best tree” is used
to denote the tree rooted in the best performing node.
An Improved Single Node Genetic Programming for Symbolic Regression
245
3.1 Depthwise Selection Strategy
The first modification focuses on the strategy for se-
lecting the nodes to be mutated. In the standard
SNGP, the node to be mutated is chosen at random.
This means that all function nodes have the same
probability of selection irrespectively of (1) how well
they are performing and (2) how well the trees of
which they are a part are performing. This is not in
line with the evolutionary paradigm where the well fit
individuals should have higher chance to take part in
the process of an evolution of the population.
One way to narrow this situation is to select nodes
according to their fitness. However, this would pre-
fer just the root nodes of trees with high fitness while
neglecting the nodes at the deeper levels of such well-
performing trees which themselves have rather poor
fitness. In fact, imposing high selection pressure on
the root nodes might be counter-productive in the end
as the mutations applied on the root nodes are less
likely to bring an improvement than mutations ap-
plied on the deeper structures of the trees.
We propose a selection strategy that takes into ac-
count the quality of the mutated trees, so that better
performing trees are preferred, as well as the depth of
the mutated nodes so that deeper nodes of the trees
are preferred to the shallow ones. The selection pro-
cedure has four steps:
1. A function node n is chosen at random.
2. A tree t with the best fitness out of all trees that
use the node n is chosen.
3. All nodes of the tree t are collected in a set S. Each
node is assigned a score equal to its depth in the
tree t.
4. One node is chosen from the set S using a binary
tournament selection considering the score values
in the higher the better manner.
3.2 Organization of the Population
The second modification aims at improving the explo-
ration capabilities of the SNGP algorithm. Two oper-
ators for placing a compact version of the tree rooted
in the best performing node to the beginning or to the
end of the population are proposed.
moveLeft Operator. Let us first describe the idea
behind and the realization of the operator that places
the compact version of the best tree to the beginning
of the population. The motivation for this operator,
denoted in this work as moveLeft operator, is that
well-performing nodes (and the whole tree structure
rooted in this node) can represent a suitable building
block for constructing even better trees when used as
a successor of other nodes in the population. Since
the chance of any node of being selected as a succes-
sor by other nodes is higher if the node is more to
the left in the population and vice versa, it might be
beneficial to store the well performing nodes at lower
positions in the population. Thus, the operator takes
the best tree, T
best
, and puts its compact version to the
very beginning of the population. The operator works
as follows:
1. Start in the best performing node and traverse
its tree, T
best
, in the breadth-first manner so that
nodes with the lowest index i are processed first.
Put the nodes of the tree into a list of nodes, L, in
the order reversed to the order in which they were
processed.
2. Set all successor and predecessor links within L
so that the structure represents the same tree as
the original tree T
best
.
3. Place the tree stored in L to the beginning of the
population, i.e. the first node of L being at the first
function node position of the population.
4. Set the successor and predecessor links within the
original tree T
best
so that the tree retains the same
functionality as it had before the action.
5. Update the successor and predecessor links of the
other nodes in the population so that as many orig-
inal links as possible are preserved while the func-
tionality of the compact tree remains intact.
Note that after the application of the T
best
opera-
tion the population contains two versions of the best
tree, the original one and the compact one. It is made
sure that all nodes of the original tree have properly
set their successors sets. If for example some succes-
sors of a node of the original best tree gets affected
by the T
best
operation (i.e. the successor falls into the
portion of the population newly occupied by the com-
pact version of the tree), the successor of the respected
node is redirected to the new version of the successor.
Moreover, some links have to be added to the list of
predecessors of nodes of the compact tree in order to
ensure a feasibility of other nodes in the population.
moveRight Operator. Similarly, an operator that
places the compact version of the best tree to the end
of the population is proposed. The motivation for this
operator, denoted in this work as moveRight operator,
is that a performance of some well-performing tree
can be further improved by mutations applied to the
nodes on deeper levels of the tree more likely than by
mutations applied to the root node or shallow nodes of
the tree. In order to increase the number of possible
structural changes to the deeper nodes of the best tree
the compact version of the tree is placed to the end of
the population. The operator works similarly to the
ECTA 2015 - 7th International Conference on Evolutionary Computation Theory and Applications
246
moveLeft operator with the difference the successor
and predecessor links are updated. Here, the prede-
cessor links of nodes that refer to the nodes within the
area of the compact version of the best tree must be
removed. Otherwise, they would affect a functional-
ity of the best tree. Note that the application of the
moveRight operator might result in the final popula-
tion that contains just a single occurrence of the best
tree. This might happen when the nodes of the origi-
nal best tree fall into the area of the compact version
of the tree.
3.3 Local Search Strategy
The last modification of the standard SNGP algorithm
consists in allowing multiple mutation in a single it-
eration of the local search procedure. The idea be-
hind this modification is rather straightforward. Dur-
ing the course of the optimization process the popula-
tion might converge to the local optimum state where
it is hard to find further improvement by just one ap-
plication of the smut operator. With multiple muta-
tions applied in each iteration, the probability of get-
ting stuck in such local optimal should be reduced. In
this work, a parameter upToN specifying the maxi-
mum number of mutation applications is used. Thus,
if the parameter is set for example to 5, a randomly
chosen number from interval h1, 5i of mutations are
applied to the population in each iteration.
3.4 Outline of Tested SNGP Algorithm
This section presents an outline of the generic SNGP
algorithm with possible utilization of the proposed
modifications, see Fig. 1. In each iteration, k muta-
tions are applied to nodes of the population, see steps
8-10. In case of the standard SNGP just a single muta-
tion is applied in each iteration. After all k mutations
have been applied, the nodes affected by this action
gets reevaluated. If the best fitness of the modified
population is not worse than the current best-so-far
fitness than the modified population becomes the cur-
rent population for the next iteration, see step 15. In
step 16, the operators moving the best tree to the be-
ginning or to the end of the population are applied to
the population, if applicable. Then the fitness evalua-
tion counter is incremented and if there are still some
fitness evaluations left the next iteration is carried out.
Once the maximal number of fitness evaluations is
used the best node (and its tree) of the population is
returned.
In this work, we use the acceptance criterion, step
13, working with the best fitness in the population,
not the average fitness of the population. The reason
is that when the moveLe f t and moveRight operators
are used, they might significantly change the average
fitness of the population while the best fitness stays
intact.
1 Initialize population of nodes, P
2 evaluate P
3 bestSoFar ← best of P
4 i ← 0 // number of fitness evaluations
5 do
6 P
0
← P // work with a copy of P
7 Choose the no. of mutations, k ∈ (1, upToN),
to be applied to nodes from P
0
8 for(n = 1 .. . k)
9 Choose the node to be mutated, N
10 P
0
← Apply mutation to node N of P
0
11 evaluate P
0
12 currBest ← best of P
0
13 if(currBest is not worse than bestSoFar)
14 bestSoFar ← currBest
15 P ← P
0
// update the population
16 If applicable, apply either moveLe f t
or moveRight operator to P
17 i ← i + 1
18 while (i ≤ maxFitnessEvaluations)
19 return bestSoFar
Figure 1: Outline of the SNGP algorithm.
4 EXPERIMENTS
This section presents experiments carried out with
standard GP, standard SNGP and SNGP with the pro-
posed modifications.
4.1 Test Cases
The algorithms have been tested on five symbolic re-
gression benchmarks
• f
1
(x) = 4x
4
− 3x
3
+ 2x
2
− x, 32 training samples
equidistantly sampled from h0, 1.0),
• f
2
(x) = x
6
− 2x
4
+ x
2
, 100 training samples
equidistantly sampled from h−1.0, 1.0)
• f
3
(x) = x
6
− 2.6x
4
+ 1.7x
2
, 100 training samples
equidistantly sampled from h−1.0, 1.0)
• f
4
(x) = x
6
− 2.6x
4
+ 1.7x
2
− x, 100 training sam-
ples equidistantly sampled from h−1.4, 1.4)
• f
5
(x
1
, x
2
) =
(x
1
−3)
4
+(x
2
−3)
3
−(x
2
−3)
(x
2
−2)
4
+10
, 100 training
samples equidistantly sampled from h0.05, 6.05)
An Improved Single Node Genetic Programming for Symbolic Regression
247
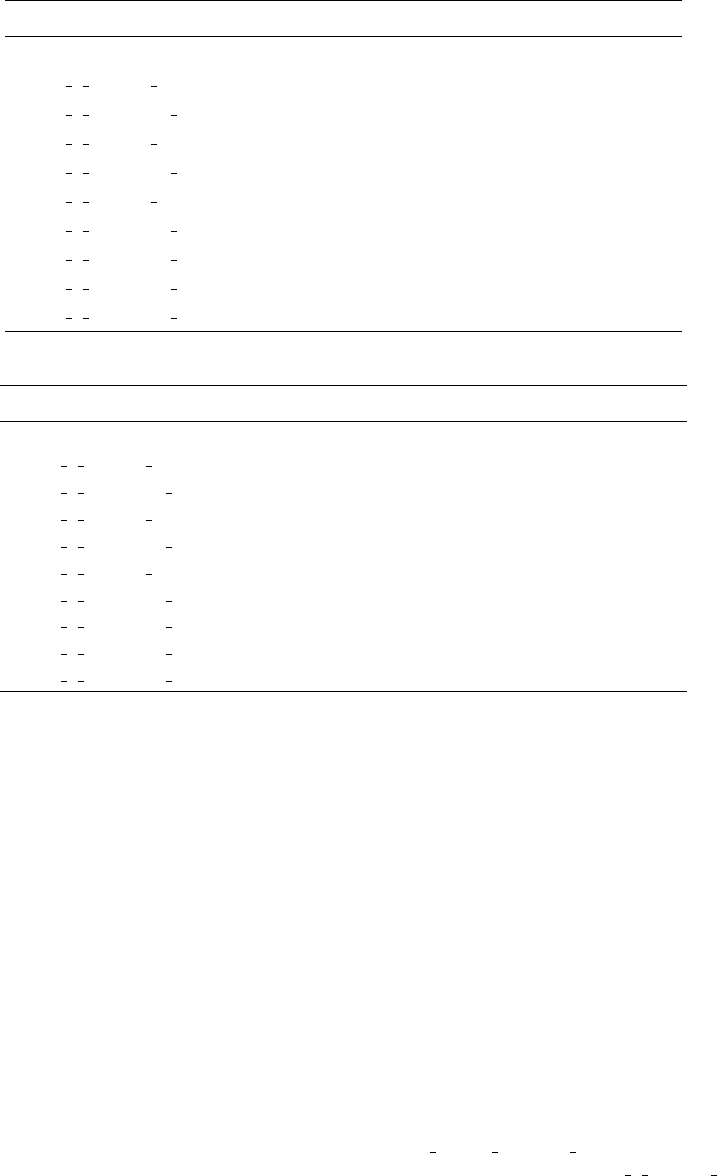
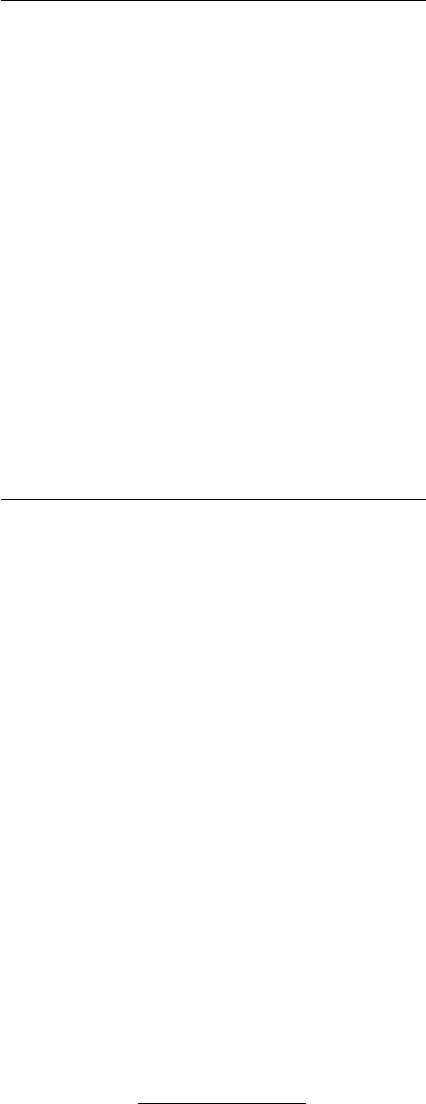
Table 1: Results obtained with the compared algorithms on the function f
1
.
algorithm fitness sample rate (%) solution rate (%) size
GP 0.14 82.8 49 151
SNGP 1 random noMove 0.65 37.2 5 26.8
SNGP 1 depthwise noMove 0.29 63.4 18 33.7
SNGP 1 random moveLeft 0.62 38.1 3 22.5
SNGP 1 depthwise moveLeft 0.25 68.4 24 33.9
SNGP 1 random moveRight 0.66 35.9 4 34.5
SNGP 1 depthwise moveRight 0.28 66.9 17 56.6
SNGP 5 depthwise noMove 0.16 78.8 49 32.3
SNGP 5 depthwise moveLeft 0.17 77.5 49 28.5
SNGP 5 depthwise moveRight 0.14 84.7 53 52.4
Table 2: Results obtained with the compared algorithms on the function f
2
.
algorithm fitness sample rate (%) solution rate (%) size
GP 0.78 88.7 69 175.1
SNGP 1 random noMove 0.85 73.4 33 27.7
SNGP 1 depthwise noMove 0.17 94.4 78 27.6
SNGP 1 random moveLeft 0.75 78 33 30.8
SNGP 1 depthwise moveLeft 0.25 92.8 65 27.7
SNGP 1 random moveRight 0.84 72.7 17 47
SNGP 1 depthwise moveRight 0.15 94.3 82 40.9
SNGP 5 depthwise noMove 1e-6 100 100 22.6
SNGP 5 depthwise moveLeft 0.08 97.8 87 21.2
SNGP 5 depthwise moveRight 0.05 98.2 91 37.2
The first two functions are rather simple polyno-
mials with small integer constants. We chose the
function f
1
since it was used in the original SNGP
paper (Jackson, 2012a). Function f
2
is the Koza-3
function taken from (McDermott, 2012). Functions
f
3
and f
4
are modifications of the Koza-3 function so
that they involve non-trivial decimal constants. Thus,
these functions should represent harder instances than
f
1
and f
2
. The function f
4
is made even harder than
f
3
while breaking the symmetry by adding the term
”−x”. The last function f
5
is a representative of a ra-
tional function of two variables. This function, known
as Vladislavleva-8 function (McDermott, 2012), rep-
resents the hardest SR problem used in this work.
The fitness of each individual is calculated as the
sum of absolute errors in the f (x) values computed by
the individual over all training samples.
4.2 Experimental Setup
All the tested variants of the SNGP use a popula-
tion of size 400. The population starts with terminal
nodes representing the variable x
1
and x
2
and a con-
stant 1.0 followed by function nodes of types {+, -, *,
/}. SNGP was run for 25,000 iterations, in each itera-
tion just a single population reevaluation is computed
(note, just the nodes that were affected by the muta-
tion are reevaluated). The number of iterations was
chosen so as to make the comparisons of the GP and
SNGP as fair as possible. This way a balance between
processed nodes and fitness evaluations is found, see
(Ryan and Azad, 2014).
The proposed modifications of the SNGP algo-
rithm are configured with the following parameters:
• upToN ∈ {1, 5},
• selection ∈ {random, depthwise}
• moveType ∈ {noMove, moveLe f t, moveRight}.
Names of the tested configurations
of the SNGP are constructed as follows
”SNGP upToN selection moveType”. The stan-
dard SNGP is denoted as SNGP 1 random noMove.
Standard GP with generational replacement strat-
egy was used with the following parameters:
ECTA 2015 - 7th International Conference on Evolutionary Computation Theory and Applications
248
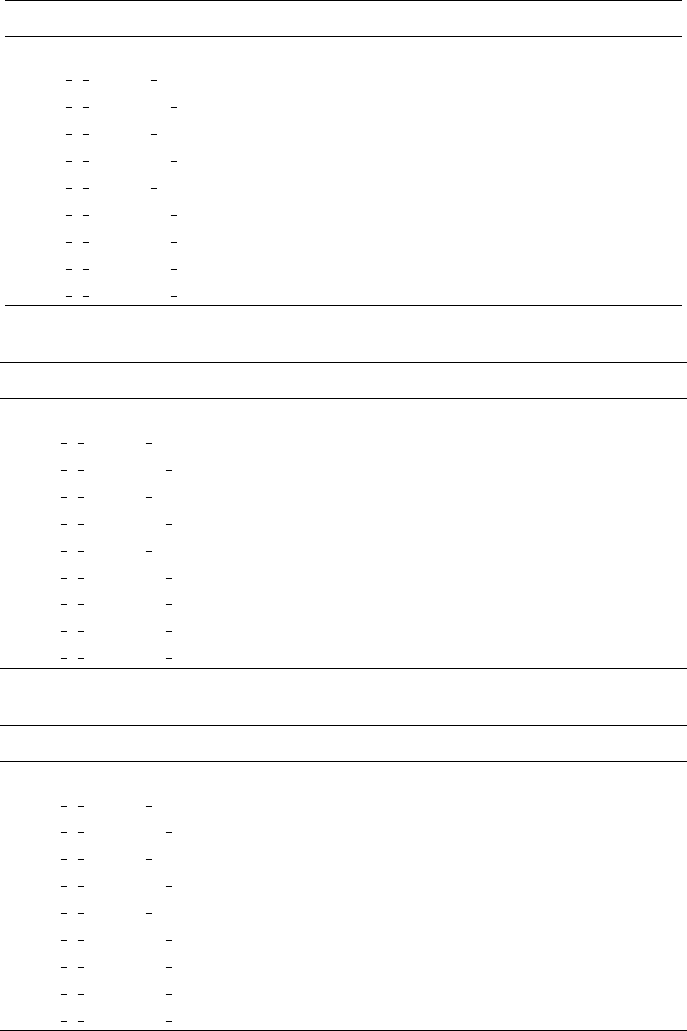
Table 3: Results obtained with the compared algorithms on the function f
3
.
algorithm fitness sample rate (%) solution rate (%) size
GP 1.19 68.4 0 155
SNGP 1 random noMove 2.7 40 0 28.9
SNGP 1 depthwise noMove 1.5 54.0 0 33.6
SNGP 1 random moveLeft 2.39 43.7 0 30.1
SNGP 1 depthwise moveLeft 1.4 59.2 0 35
SNGP 1 random moveRight 2.75 37.2 0 43.4
SNGP 1 depthwise moveRight 1.6 51.6 0 56.2
SNGP 5 depthwise noMove 1.37 59.2 0 32.6
SNGP 5 depthwise moveLeft 1.23 65.6 0 30.3
SNGP 5 depthwise moveRight 1.35 60.8 0 57.2
Table 4: Results obtained with the compared algorithms on the function f
4
.
algorithm fitness sample rate (%) solution rate (%) size
GP 11.0 19.4 0 146.8
SNGP 1 random noMove 10.5 12.9 0 26.1
SNGP 1 depthwise noMove 7.8 21.7 0 34.2
SNGP 1 random moveLeft 11.2 10.8 0 26.5
SNGP 1 depthwise moveLeft 8.3 19.0 0 32.9
SNGP 1 random moveRight 8.9 19.0 0 45.8
SNGP 1 depthwise moveRight 7.4 22.4 0 53.9
SNGP 5 depthwise noMove 7.15 25.8 0 31.5
SNGP 5 depthwise moveLeft 7.4 24.0 0 28
SNGP
5 depthwise moveRight 6.7 27.2 0 50.8
Table 5: Results obtained with the compared algorithms on the function f
5
.
algorithm fitness sample rate (%) solution rate (%) size
GP 71.2 4.4 0 194.3
SNGP 1 random noMove 64.1 4.0 0 26.0
SNGP 1 depthwise noMove 61.6 3.8 0 35.6
SNGP 1 random moveLeft 64.9 3.8 0 27.3
SNGP 1 depthwise moveLeft 60.0 4.1 0 34.9
SNGP 1 random moveRight 63.6 4.4 0 44.3
SNGP 1 depthwise moveRight 61.1 4.1 0 51.6
SNGP 5 depthwise noMove 60.7 3.7 0 32.8
SNGP 5 depthwise moveLeft 60.9 3.6 0 31.9
SNGP 5 depthwise moveRight 60.4 4.0 0 51.1
• Function set: {+, -, *, /}
• Terminal set: {x
1
, x
2
, 1.0}
• Population size: 500
• Initialization method: Ramped half-and-half
• Tournament selection: 5 candidates
• Number of generations: 55, i.e. 54 generations
plus initialization of the whole population
• Crossover probability: 90%
• Reproduction probability: 10%
• Probability of choosing internal node as crossover
point: 90%
An Improved Single Node Genetic Programming for Symbolic Regression
249

For the experiments with the GP we used the
Java-based Evolutionary Computation Research Sys-
tem ECJ 22
2
.
One hundred independent runs were carried out
with each tested algorithm on each benchmark and
the observed performance characteristics are
• fitness – the mean best fitness over 100 runs;
• sample rate – the mean number of successfully
solved samples by the best-fitted individual calcu-
lated over 100 runs, where the sample is consid-
ered to be successfully solved by the individual
iff the absolute error achieved by the individual
on this sample is less then 0.01;
• solution rate – the percentage of complete solu-
tions found within 100 runs, where the runs com-
pletely solves the problem iff the best individual
generates on all training samples the absolute er-
ror less than 0.01;
• size – the mean number of nodes of the best solu-
tion found calculated over 100 runs.
4.3 Results
The results obtained with the compared algorithms
are presented in Tables 1-5. The first observation
is that our results obtained on the benchmark f
1
are
quite different than the results presented in (Jackson,
2012a), as the performance of the SNGP is not as
good as the SNGP performance presented there whilst
the standard GP performs much better than presented
in (Jackson, 2012a). This might be caused by differ-
ent configurations of the SNGP and GP used in our
work and in (Jackson, 2012a). We used different ac-
ceptance criterion in SNGP and the generational in-
stead of the steady-state replacement strategy in GP.
This observation might indicate that both approaches
are quite sensitive to the proper setting of their indi-
vidual components.
The second observation is that the modified ver-
sions of SNGP systematically outperform the stan-
dard SNGP w.r.t. the fitness, sample rate and solution
rate performance measures. On the other hand, the
modified SNGP is not a clear winner over the stan-
dard GP. The SNGP outperforms GP on f
2
, f
4
and f
5
.
On f
1
it performs equally well as the GP On f
3
, all
versions of SNGP get outperformed by the GP w.r.t.
the f itness. It turns out functions f
3
, f
4
and f
5
repre-
sent a real challenge for all tested algorithms since no
one was able to find a single correct solution within
the 100 runs. We hypothesize the hardness of f
3
and
2
https://cs.gmu.edu/ eclab/projects/ecj/
f
4
stems from the fact these benchmarks involve non-
trivial constants that might be hard to evolve. Func-
tion f
5
is hard since it is a rational function.
The third observation is that there is a clear trend
showing that the depthwise node selection works sig-
nificantly better than the random one. Whenever the
SNGP configurations differ just in the selection type
the one using the depthwise selection outperforms the
one with the random selection.
The fourth observation is that the reorganiza-
tion of the population using either the moveLe f t or
moveRight operator does not have any significant im-
pact on the overall performance of the algorithm. It
happens only rarely that the SNGP using moveLe f t
or moveRight outperforms its counterpart configu-
ration with no move operator used. In particular,
the moveLe f t operator was significantly better
3
than
noMove in four cases, the moveRight operator was
significantly better than noMove in two cases as in-
dicated by values written in bold in Tables 1-5. On
the other hand, the noMove configuration happened
to outperform both the moveLe f t and moveRight con-
figuration on function f
2
.
The fifth observation is that the local search strat-
egy allowing multiple mutations in one iteration out-
performs the standard local search procedure with just
a single application of the mutation operator per iter-
ation. This is with agreement with our expectations.
Last but not least, the SNGP consistently finds
much smaller trees than the GP. This is very impor-
tant since very often solutions of small size that are
interpretable by human are sought in practice.
5 CONCLUSIONS
This paper proposes three extensions of the standard
Single Node GP, namely (1) a selection strategy for
choosing nodes to be mutated based on the depth of
the nodes, (2) operators for placing a compact version
of the best tree to the beginning and to the end of the
population, and (3) a local search strategy with multi-
ple mutations applied in each iteration.
All proposed modifications have been experimen-
tally evaluated on three symbolic regression prob-
lems and compared with standard GP and SNGP. The
achieved results are promising showing the potential
of the proposed modifications to significantly improve
the performance of the SNGP algorithm.
The next step of our research will be to carry out
a thorough experimental evaluation of the modified
SNGP algorithm and other GP paradigms such as the
3
Checked using the T-test at the 5% significance level
ECTA 2015 - 7th International Conference on Evolutionary Computation Theory and Applications
250
standard GP and GE with the primary objectives be-
ing the speed of convergence and the ability to react
fast to the changes of the environment. Further ex-
tensions of the SNGP algorithm will include a utiliza-
tion of new mutation operators, for example a mu-
tation operator altering the function type of the mu-
tated node. Since the local strategy is very prone to
get stuck in a local optimum, we will also investigate
mechanisms for escaping from the local optima such
as the restarted search with perturbations.
As the experimental results suggest, the SNGP al-
gorithm might become ineffective when trying to ap-
proximate a target function that involves non-trivial
constants. Thus, we will investigate possibilities of
hybridization of the SNGP with local tuning tech-
niques such as multivariate linear regression.
ACKNOWLEDGEMENT
This research was supported by the Grant Agency of
the Czech Republic (GA
ˇ
CR) with the grant no. 15-
22731S entitled ”Symbolic Regression for Reinforce-
ment Learning in Continuous Spaces”.
REFERENCES
Ferreira, C. (2001). Gene expression programming: A new
adaptive algorithm for solving problems. Complex
Systems, 13(2):87–129.
Jackson, D. (2012a). A new, node-focused model for ge-
netic programming. In EuroGP 2012, pages 49–60.
Jackson, D. (2012b). Single node genetic programming on
problems with side effects. In PPSN XII, pages 327–
336.
Koza, J. (1992). Genetic programming: On the Program-
ming of Computers by Means of Natural Selection.
MIT Press, Cambridge, 2nd edition.
McDermott, J. e. a. (2012). Genetic programming needs
better benchmarks. In Proceedings of the GECCO ’12,
pages 791–798, New York, NY, USA. ACM.
Miller, J. and Thomson, P. (2000). Cartesian genetic pro-
gramming. In Poli, R. et al. (eds.) EuroGP 2000,
LNCS, vol. 1802, pp. 121–132. Springer.
Ryan, C. and Azad, R. M. A. (2014). A simple ap-
proach to lifetime learning in genetic programming-
based symbolic regression. Evolutionary Computa-
tion, 22(2):287–317.
Ryan, C., Collins, J., Collins, J., and O’Neill, M. (1998).
Grammatical evolution: Evolving programs for an ar-
bitrary language. In LNCS 1391, Proceedings of the
First European Workshop on Genetic Programming,
pages 83–95. Springer-Verlag.
An Improved Single Node Genetic Programming for Symbolic Regression
251
