For Sale or Wanted: Directed Crossover in Adjudicated Space
Jeannie M. Fitzgerald and Conor Ryan
Biocomputing and Developmental Systems Group, University of Limerick, Limerick, Ireland
Keywords:
Search Spaces, Directed Crossover, Genetic Programming.
Abstract:
Significant recent effort in genetic programming has focused on selecting and combining candidate solutions
according to a notion of behaviour defined in semantic space and has also highlighted disadvantages of relying
on a single scalar measure to capture the complexity of program performance in evolutionary search. In this
paper, we take an alternative, yet complementary approach which directs crossover in what we call adjudicated
space, where adjudicated space represents an abstraction of program behaviour that focuses on the success or
failure of candidate solutions in solving problem sub-components. We investigate the effectiveness of several
possible adjudicated strategies on a variety of classification and symbolic regression problems, and show that
both of our novel pillage and barter tactics significantly outperform both a standard genetic programming and
an enhanced genetic programming configuration on the fourteen problems studied.
1 BACKGROUND
Previously, research effort in directed crossover has
focused primarily on determining suitable crossover
points in genetic programming trees (GP) (Koza,
1990). See, for example (Langdon, 1995; Langdon,
1999).
One example of this effort can be seen with Con-
text Aware Crossover (CAC) which was proposed in
(Majeed and Ryan, 2006). In this method, after two
parents have been selected for crossover, one sub-tree
is randomly chosen in the first parent and this sub-
tree is then crossed over into all possible locations in
the second parent and all generated children are eval-
uated. The best child (based on fitness) is selected
and copied to the next generation. An advantage of
such context-based crossovers is increased probabil-
ity of producing children which are better than their
parents. On the other hand, it can be time consuming
to evaluate the context of each sub-tree.
The notion of a potentially unifying, repre-
sentation independent geometric crossover operator
was initially explored in (Moraglio and Poli, 2004;
Moraglio and Poli, 2005; Moraglio et al., 2006) in
which the authors proposed viewing solution space as
a geometric discrete space rather than a graph struc-
ture as was previously the norm. This new view
of solution space supports the concept of distance
by which we can imagine measuring somehow the
distance between candidate solutions in the solution
space or the distance between a solution and the
global maximum/minimum.
These ideas provided a platform for looking at ge-
netic operators such as crossover in a profoundly dif-
ferent way, where the emphasis is shifted away from
the structure of solutions and focuses instead on their
meaning as expressed by their semantics. Taking this
approach facilitates the measurement and utilisation
of distances in semantic space both between candi-
date solutions and between those solutions and the
desired target.
There is currently no definitive agreement on the
exact meaning of the term semantics in GP. However,
a fairly widely adopted one (Krawiec and Lichocki,
2009; Moraglio et al., 2012; Castelli et al., 2014),
which we also adopt here, is that the semantics of a
GP program is the vector of outputs that GP program
produces on training data: i.e. each value in the out-
put vector represents the result of evaluating the GP
program on a single training instance.
Semantically Driven Crossover (SDC) was sug-
gested in (Beadle and Johnson, 2008) in which they
applied a technique which removed redundant and
unreachable arguments from boolean GP programs
and produced Reduced Order Binary Decision Dia-
grams (ROBBDs) which could then be used to com-
pare program semantics. In that work, crossovers
were discarded unless the offspring were semantically
different from the parents. They reported superior per-
formance and less code bloat using SDC and observed
Fitzgerald, J. and Ryan, C..
For Sale or Wanted: Directed Crossover in Adjudicated Space.
In Proceedings of the 7th International Joint Conference on Computational Intelligence (IJCCI 2015) - Volume 1: ECTA, pages 95-105
ISBN: 978-989-758-157-1
Copyright
c
2015 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
95
that bloat may be partially a result of intron creation
during crossover.
This ideas of SDC was extended for real val-
ued symbolic regression (SR) problems in (Nguyen
et al., 2009; Uy et al., 2009) which proposed Semantic
Aware Crossover (SAC), and investigated several pos-
sible scenarios in which they compared the semantics
of offspring with their parents, and depending on the
outcome accepted either or both offspring and/or par-
ents into the new population. They also examined the
effectiveness of a method which compared the seman-
tics of sub-trees at proposed crossover points, only ac-
cepting offspring into the new population if the sub-
trees were not semantically equivalent. They inves-
tigated SAC on several real-world SR problems and
concluded that the sub-tree approach was the most ef-
fective of those trials, and that SAC was a useful tech-
nique for maintaining diversity a GP population.
(Krawiec and Lichocki, 2009) developed an ap-
proach to semantic crossover that utilised a type of
brood recombination. In this method, called approx-
imately geometric semantic crossover (SX), a pool
of offspring is produced using sub-tree crossover for
each mating pair, and the offspring whose semantics
are closest to its parents is selected unless there is a
child with higher fitness than both parents, in which
case it is selected regardless of semantics.
The alluring appeal of geometric semantic
crossover is that effective operators of this type can
provide a guarantee that the fitness of the offspring
produced will be no worse than the fitness of its par-
ent with the worst fitness, providing the semantics of
the offspring lie between the semantics of its parents
in solution space. The challenge is to design opera-
tors that have this property but which are also usable
in practice. Against this background, Krawiec (Kraw-
iec, 2012) investigated two approaches for generat-
ing offspring GP individuals whose semantics are me-
dial (intermediate) with respect to the semantics of
their parents. Both methods concentrated on approx-
imating mediality by determining semantic similarity
of sub-programs and basing crossovers on that - an
approach that was much more computationally realis-
tic than trying to deal with whole programs.
A novel approach influenced by Quantitative
Genetics which the researchers called phenotypic
crossover was suggested in (Bassett et al., 2012).
This method aimed at maximising heritability by forc-
ing offspring to have similar traits to their ancestors.
The method delivered improved results over standard
GP on several problems.
(Naredo et al., 2013; Trujillo et al., 2013) adopted
a strategy which abstracted one or two levels beyond
semantic space into what they referred to as behaviour
space. They explored the idea of behaviour based
search using several binary classification problems,
where rather than using an explicit fitness function
they used open ended evolution guided by a type
of novelty search (NS) (Lehman and Stanley, 2008;
Lehman and Stanley, 2010). In this approach, selec-
tion was based on the relative novelty of individual
behaviour, where behaviour was represented by a bi-
nary descriptor. They experimented with two differ-
ent binary descriptors, each of which was a vector of
zeros and ones: one which captured whether the indi-
vidual correctly predicted each class label or not (ac-
curacy descriptor), and the other which captured the
predicted class labels (class descriptor). They re-
ported that NS outperformed standard GP on difficult
problems but did slightly worse on trivial ones. Inter-
estingly, they also observed that their application of
NS seemed to eliminate or at least control bloat.
ESAGP (Error Space Alignment GP) was pre-
sented by (Ruberto et al., 2014) who explored mech-
anisms for finding compatible individuals based on
their alignment in error space. In other work, (Kraw-
iec and O’Reilly, 2014) have recently proposed be-
havioural programming GP (BPGP), an approach
which involves decomposing and archiving for later
use, sub-programs which have good utility, where
utility captures both the error of the sub-program and
its perceived usefulness according to a decision tree
methodology. They reported excellent results on a
wide variety of problems.
A closely related but quite different idea was ex-
plored by (Krawiec and Liskowski, 2015) who ap-
plied a clustering technique to test based problems.
Their Discovery of Objectives by Clustering (DOC)
system clustered GP programs together if they had
similar behaviour on the same test cases. They con-
structed interaction matrices, obtaining derived ob-
jectives to approximately represent this common be-
haviour and produce more effective search drivers.
The method was compared with several other opti-
mised GP algorithms and was shown to deliver statis-
tically better results on a range of problems.
The notion of behaviour space has its origins in
the area of robotics research (Brooks, 1999) for which
the terminology would seem to be eminently suitable.
We propose to further refine and unify the terminol-
ogy for GP such that behaviour space as defined in
(Naredo et al., 2013; Trujillo et al., 2013) is decom-
posed into semantic space, result space and adjudi-
cated space. In this view, taking classification as an
example, result space maps to the class descriptor de-
scribed in (Naredo et al., 2013) and adjudicated space
to the accuracy descriptor. With regard to symbolic
regression, result space is equivalent to error space as
ECTA 2015 - 7th International Conference on Evolutionary Computation Theory and Applications
96
described in (Ruberto et al., 2014).
An exhaustive description of the relevant literature
is beyond the scope of this paper. For in depth re-
views of semantic approaches the reader is directed to
(Pawlak et al., 2014) and to (Vanneschi et al., 2014).
2 ADJUDICATED GP (AGP)
Our method is analagous to the process of selective
breeding (sometimes called artificial or unnatural se-
lection), whereby humans breed animals or plants for
certain traits – typically in order to domesticate them.
We have studied the effectiveness of our proposed
approach on both classification and SR problems. The
strategy is essentially the same for both tasks, but
is, of necessity, slightly more complex in the case of
symbolic regression. For the moment, we will explain
the basic method as it applies to classification and de-
fer description of symbolic details for later.
If we take a hypothetical example of a binary clas-
sification problem using GP, where each candidate so-
lution is evaluated on the same ten problem instances.
Supposing we have an individual which produces the
semantics shown in Figure 1 and we apply a threshold
whereby if the semantic is <= 50 the instance is clas-
sified as belonging to class 1 and otherwise to class 2.
10 23 126 4 78 33 279 8 67 22
Figure 1: Semantic descriptor.
This thresholding gives rise to the result descriptor
shown in Figure 2, where 0 represents instances of
class 1 and 1 represents instances of class 2.
0 0 1 0 1 0 1 0 1 0
Figure 2: Result descriptor.
Now, if we consider the ground truth for the 10 in-
stances as shown in Figure 3, we can adjudicate, i.e
make a judgement on the success or failure of our hy-
pothetical individual on each problem instance, re-
sulting in the adjudicated descriptor shown in Fig-
ure 4. The adjudicated representation provides a fine
grained view of individual performance compared to
a scalar fitness value such as classification accuracy.
We can easily imagine that even for a ten instance
problem there may be many individuals with exactly
the same fitness score, each of whom are correctly
classifying a different set of instances.
1 1 1 1 1 0 0 0 0 1
Figure 3: Ground Truth.
As Krawiec et al. (Krawiec and O’Reilly, 2014)
pointed out, the reliance on a scalar fitness value to
drive evolution “may be crippling because one cannot
expect difficult learning and optimization problems to
be efficiently solved by heuristic algorithms that are
driven by a scalar objective function which provides
low-information feedback”.
0 0 1 0 1 1 0 1 0 0
Figure 4: Adjudicated Descriptor.
With this in mind, we choose to pursue the goal of
effectively navigating the solution space by focusing
on program behaviour in adjudicated space. We are
not concerned with program syntax or representation
- simply on identifying which GP programs can solve
which problem instances and using this information
to determine a mating strategy.
Thus, for each individual we decompose its ad-
judicated descriptor into a for sale list which is a list
identifying the problem instances that it is able to cor-
rectly predict and a wanted list which details those in-
stances which it has failed to correctly predict. See
Figures 5 and 6.
In traditional GP approaches, individuals are se-
lected for mating based on fitness, where very unfit
individuals usually have very limited opportunities to
participate in crossover. In contrast, much of the re-
search effort outlined in section 1 explores various
strategies for finding pairs or groups of individuals
which are well-matched. according to some measure
of semantic compatibility before combining them to
produce new candidate solutions. Similar to other re-
cent work on semantic aware crossover, we choose to
explore the idea that it is more important that individ-
uals are compatible in other, potentially more impor-
tant ways than fitness.
The system that we propose simplifies the search
for compatible mates by focusing on individual be-
haviour in adjudicated space. Once an adjudication
has been made based on an individual’s results, and
the for sale and wanted lists have been populated, we
can select a mate for that individual by choosing a
prospective partner whose for sale list advertises the
ability to solve instances that are on its wanted list.
As long as all individuals are adjudicated in the
same way, if the for sale list of an individual contains
a reference to an instance which is on the wanted list
of another, then that pair of individuals are defined to
be compatible to some degree.
As we have already described, the adjudication pro-
cess for classification tasks is quite straightforward
regardless of the number of classes: each semantic
is converted into a result (predicted class label) and
For Sale or Wanted: Directed Crossover in Adjudicated Space
97

Table 1: Symbolic Regression Benchmarks.
Where X is one of 20 values uniformly distributed
between −1 and + 1.
Name Description
Nyg2 (Uy et al., 2011) X
4
+ X
3
+ X
2
+ X
Nyg3 (Uy et al., 2011) X
5
+ X
4
+ X
3
+ X
2
+ X
Nyg4 (Uy et al., 2011) X
6
+ X
5
+ X
4
+ X
3
+ X
2
+ X
this is judged to be correct or incorrect – for sale or
wanted. The process is slightly more complicated for
symbolic regression problems as the notion of cor-
rectness is not as clear cut. There are various ways
that this issue could be approached including, for ex-
ample, using the idea of “hits” where some defined
minimum level of error on a training instance con-
stitutes a hit. Preliminary experiments confirmed the
intuition that setting the threshold value too low was
unhelpful, particularly early in the evolutionary pro-
cess. Thus we choose to use the population median
mean absolute error (MAE) as the threshold for de-
termining whether an instance is put on the for sale or
wanted list. That is, for a given individual, if its error
for a given training instance is less than the popula-
tion median error for that instance it is adjudicated as
being a success and the fitness case is put on the in-
dividual’s for sale list, whereas if the error is greater
than or equal to the population median error, the in-
dividual is adjudicated to have failed on that fitness
case and the instance is put on the wanted list. This
is an aspect that requires further experimentation and
analysis.
2 4 5 7
Figure 5: For Sale List.
0 1 3 6 8 9
Figure 6: Wanted List.
Once the for sale and wanted lists have been created
for each individual in the population, there are proba-
bly many different strategies which could be adopted
in order to maximise compatibility. For this prelim-
inary study we have chosen to explore two different
strategies which we call pillage and barter. Each
of these strategies aims to find a mating pair which
are approximately optimally compatible according to
slightly differing objectives.
2.1 Pillage
The pillage method is a selfish strategy whereby for
each individual the system seeks out and chooses that
mate which offers the best return in terms of satisfy-
ing the wanted list of the first individual. For both SR
and classification tasks, the wanted list is compared
with the for sale list of every other individual and the
individual which has greatest number of elements in
the intersection of the two lists is selected.
2.2 Barter
As the name suggests, the barter approach is a more
congenial strategy whereby each participating indi-
vidual has the opportunity to gain from the transac-
tion. When the barter tactic is employed, directed
crossover only happens if each prospective parent lists
instance/s on their for sale list which the other has on
their wanted list.
At each generation the compatibility of each in-
dividual with every other individual is determined
by calculating a barter rate which is analogous to
the balanced accuracy measure used in classification.
Similar to the pillage approach, the mate with highest
compatibility is selected.
2.3 MuLambda GP (mlGP)
For the mlGP configuration crossover and mutation
operate as for stdGP, however the selection process is
slightly different: similar to the selection method ex-
plained in (Deb et al., 2002) where µ individuals from
the initial population are used to generate λ offspring,
and the best µ individuals from the entire µ + λ pool
are selected to form the new population. In this in-
stance λ = 2 ∗ µ; each crossover operation produces
two offspring.
2.4 AGP Selection
In traditional GP a mating pool is often created by pre-
selecting individuals according to some selection al-
gorithm. Tournament selection is a popular approach,
whereby the larger the tournament the more elitist the
selection process. We do not consider this method
appropriate for Adjudicated GP (AGP) as the overall
fitness score of any individual is largely irrelevant for
the purpose of directing crossover. For example, we
can easily imagine that an otherwise unfit individual
may have the capability to correctly solve some small
set of fitness cases. Thus, each individual in the pop-
ulation has the opportunity to participate in crossover
events and we perform post selection at each genera-
tion, once mating is completed.
This is achieved by adopting a µ + λ approach
similar to the mlGP method outlined above: a pop-
ulation of µ candidate solutions is used to produce a
ECTA 2015 - 7th International Conference on Evolutionary Computation Theory and Applications
98
Table 3: Classification Benchmarks (Bache and Lichman, 2013).
Dataset Acronym Instances Attributes Classes
Blood Transfusion BT 684 3 2
Liver Disorders BUPA 256 6 2
Caravan Insurance CAR 5946 85 2
German Credit GC 750 25 2
Haberman’s Survival HS 255 4 2
Ionosphere ION 348 35 2
Parkinsons Disease PK 195 22 2
Wisconsin Breast Cancer WBC 452 9 2
Iris IR 150 4 3
Vertebral Column VC 310 6 3
Wine WN 178 9 3
Table 2: GP Parameters. For classification problems a tour-
nament size of 3 applies to standard and Mu Lambda (ML)
experiments whereas tournaments of 7 candidates were
used for the AGP setups.
Parameter Value Value
Problem Type Classification SR
Population Size 200 200
Max. Generations 30 250
Max Init depth 6 6
Max Depth 16 16
Tournament Size 3/9 7
Crossover Prob. 0.9 0.9
Mutation Prob. 0.1 0.1
Evolutionary Model Generational Generational
pool of λ new individuals consisting of parents and
offspring, from which µ individuals are chosen by
tournament selection to form the next generation. In
the current implementation λ = 2 ∗ µ; each individual
program participates in crossover with its compatible
mate and each crossover, which occurs at a predeter-
mined probability, produces two offspring.
3 EXPERIMENTAL ANALYSIS
We choose to compare our proposed AGP variants
(pillage and barter) with a standard GP (stdGP) set-
up. In addition, and in order to isolate any poten-
tial effects we also compare with a basic µ + λ ap-
proach (mlGP) to determine if the selection strategy
confers any benefits in and of itself.
3.1 Problems
We have selected several well known classification
and symbolic regression benchmark problems on
which to evaluate our proposed method. Classifica-
tion problems consist of eight binary and three multi-
class problems with varying numbers of instances and
attributes as outlined in Table 3, whereas the three
symbolic regression tasks chosen are described in Ta-
ble 1.
3.2 Parameters
Details of the function sets used are shown in Table 4.
Note that constants are not used for any of the prob-
lems studied. Details of other relevant parameter set-
tings are detailed in Table 2.
Table 4: Function sets used. Division, log, exp are pro-
tected.
Type Function Set
Classification +,−,∗,/
Symbolic Regression +,−,∗,/,sin,cos,log,exp,neg
For the regression tasks the objective function aims to
minimise MAE, whereas for all of the classification
problems balanced accuracy is the objective function
which the system strives to maximise. Balanced ac-
curacy also known as Average accuracy which is a
well know performance measure used in classifica-
tion. This method modifies the calculation for overall
accuracy to better emphasise the performance of each
individual on each class as shown in Equation 1. The
true positive (TP) rate is the proportion of positive
instances which the individual classifies as positive,
whereas the true negative (TN) rate is the proportion
of negative instances which are classified as negative.
The false positive (FP) and false negative (FN) rates
are the proportions of negatives which are wrongly
classified as positive and the proportion of positive
instances which are incorrectly classified as negative.
Generally, positive and negative instances correspond
to instances of the minority and majority classes re-
spectively.
BalAcc = 0.5 ∗
T P
(T P + FN)
+
T N
(T N + FP)
(1)
For Sale or Wanted: Directed Crossover in Adjudicated Space
99
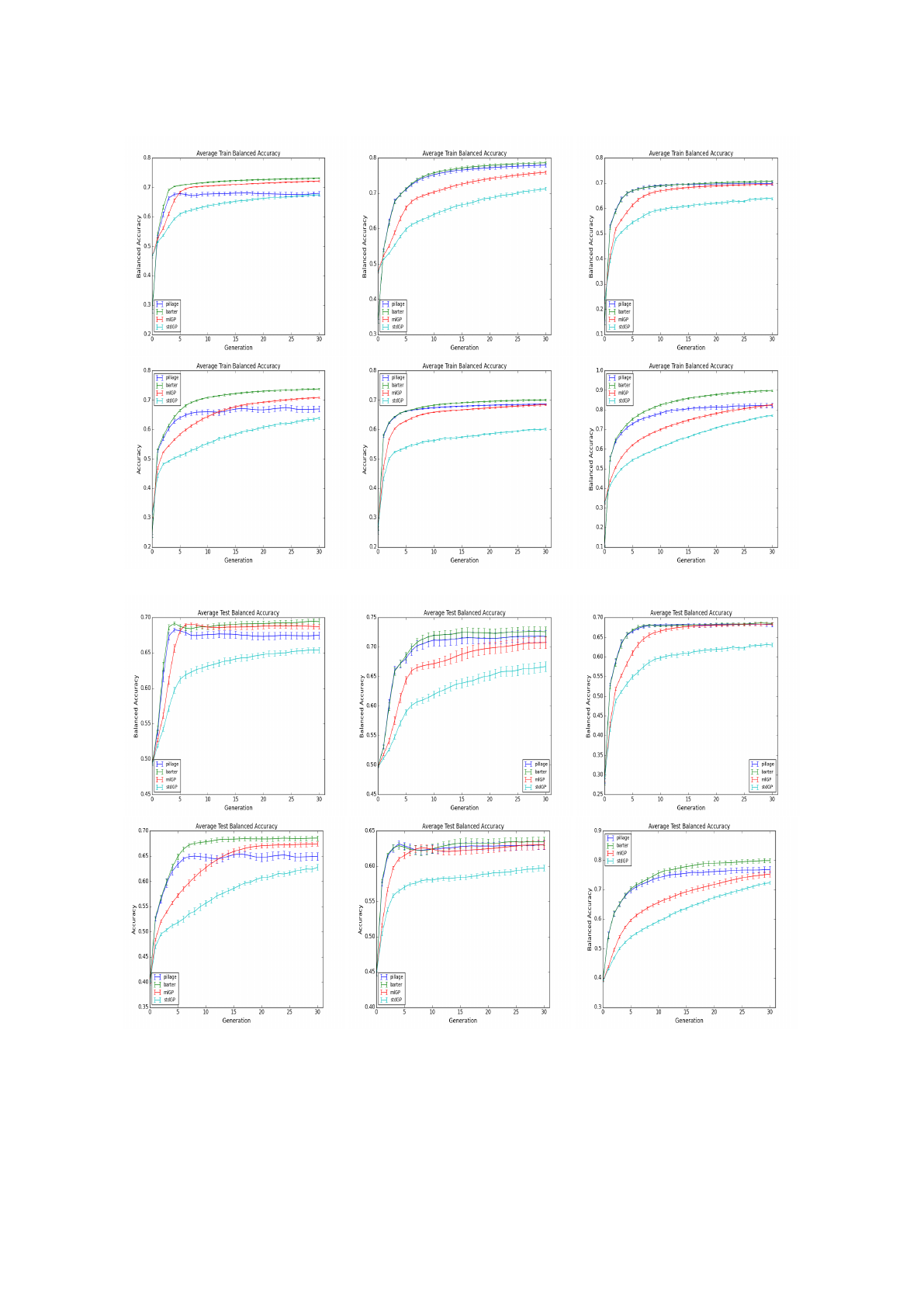
Figure 7: Balanced Training Accuracy for (from top to bottom and left to right) BT, BUPA, CAR, GC, HS and ION data.
Figure 8: Balanced Test Accuracy for (from left to right) BT, BUPA, CAR, GC. HS and ION data.
3.3 Results
For classification benchmarks we report the average
training and test balanced accuracy and the program
size. Looking at the plots in Figures 7 to 10 we can
see that a consistent pattern emerges: the Barter ap-
proach produces the best performance on all of
ECTA 2015 - 7th International Conference on Evolutionary Computation Theory and Applications
100
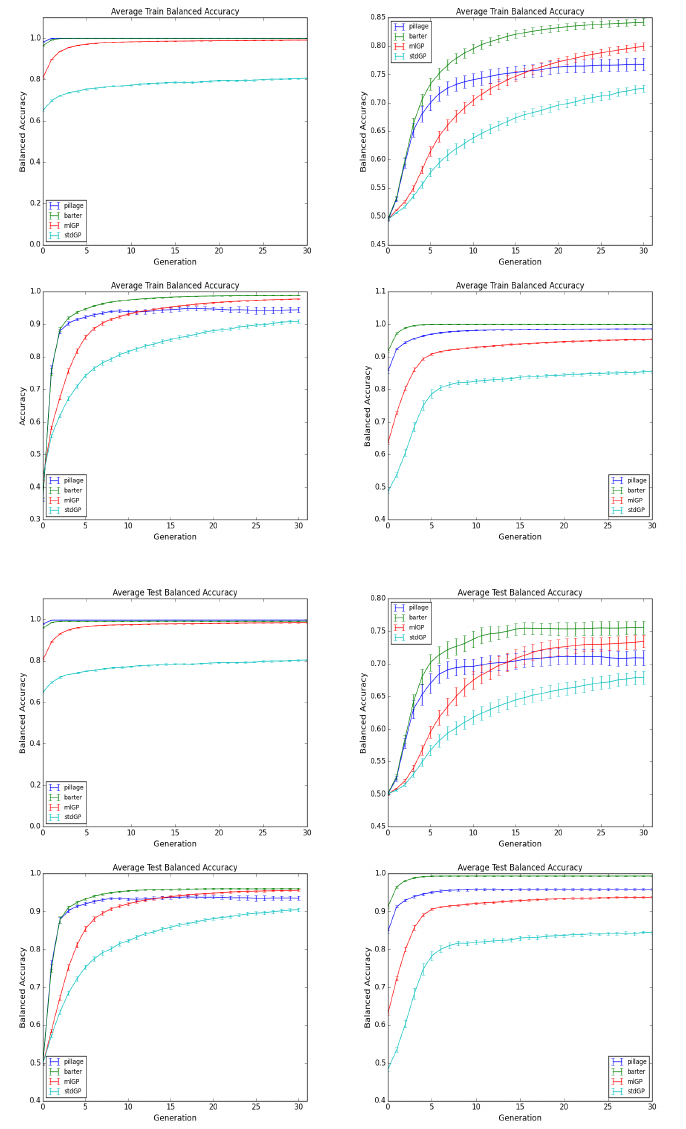
Figure 9: Training Accuracy for (from left to right) IRIS, PARK, WBC and WINE data.
Figure 10: Test Accuracy for (from left to right) IRIS, PARK, WBC and WINE data.
the benchmarks studied and stdGP delivers the weak-
est results overall. While the success of the barter
approach compared to pillage is philosophically sat-
isfying it is nevertheless somewhat surprising given
that there is almost inevitably a compromise associ-
ated with using the barter method. Interestingly, the
For Sale or Wanted: Directed Crossover in Adjudicated Space
101

Figure 11: Average Program Size for (from left to right, top to bottom) BT, BUPA, CAR, GC, HS, ION, IRIS and PARK data.
mlGP set-up produces results which are much better
than stdGP.
Turning our attention to the symbolic regression
tasks we report both the number of successful runs
together with the median MAE of the best of run in-
dividuals in Table 5. We use the same criteria for a
successful run as in (Uy et al., 2011) which defines a
successful run as one where any individual scores hits
on all fitness cases – where a hit occurs when the ab-
solute error is less than 0.01 for a single fitness case.
Looking at the results in Table 5 we can see that, simi-
lar to the classification performances, of the two AGP
configurations, the Barter configuration delivers su-
perior results in terms of the number of successful
runs on all three problems, also outperforming both
stdGP and mlGP, having almost twice as many suc-
cessful runs as stdGP on all problems. When it comes
to average MAE the situation is reversed, with both
stdGP and mlGP producing the lowest median error,
although the difference is not significant.
3.3.1 Program Size
For all of the classification problems studied pro-
gram growth during evolution was much more mod-
est when either of the AGP variants were employed
as can be seen in Figure 11. Of course, there is some
computational cost to the proposed AGP method as
compatibility has to be determined for each prospec-
tive mate. However, this is strongly mitigated by the
fact that solutions evolved using AGP are significantly
smaller than those produced by stdGP or mlGP.
Smaller solutions are also produced by the AGP
methods for the SR problems. This may partly be ex-
plained by the fact that evolution terminates if a per-
fect solution is found, and there are more of these dis-
ECTA 2015 - 7th International Conference on Evolutionary Computation Theory and Applications
102
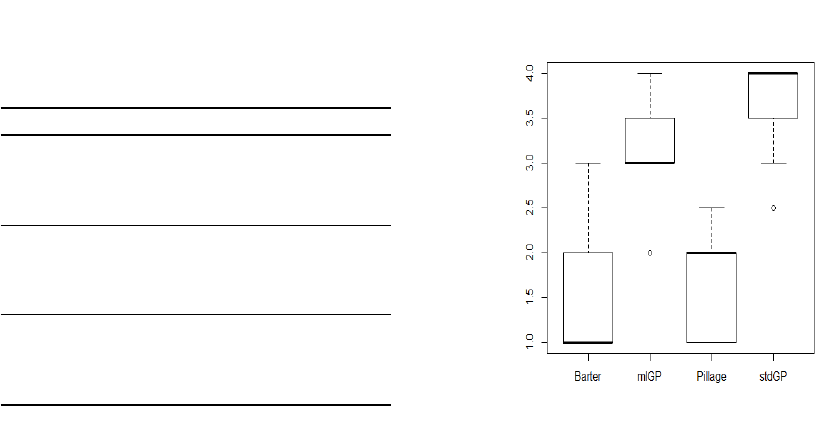
Table 5: Correct solutions, median error and nodes used for,
best-of-run individuals over 100 evolutionary runs.
Method Correct Median MAE Nodes
Nyg2
Barter 33 0.02 70.9
Pillage 20 0.02 63.3
mlGP 18 0.02 72.4
stdGP 16 0.02 95.6
Nyg3
Barter 20 0.03 84.0
Pillage 9 0.03 81.1
mlGP 8 0.02 97,2
stdGP 6 0.02 88.1
Nyg4
Barter 13 0.03 67.5
Pillage 13 0.03 64.1
mlGP 1 0.02 103.2
stdGP 4 0.02 108.7
covered during AGP runs. Thus, one possible reason
for smaller solutions is that the average size may be
smaller when there are more early terminations.
Aside from the empirical evidence we do not cur-
rently have any solid explanation as to why solutions
evolved using AGP are so much smaller than those
produced using the canonical GP on the classifica-
tion problems. However, we can hypothesise that the
targeted nature of the method may reduce the possi-
bility of intron development. In this regard, we note
the similarity with the behaviour reported in (Trujillo
et al., 2014) and also in (Beadle and Johnson, 2008).
To determine statistical significance, we carried
out the non-parametric Friedman test which is re-
garded as a suitable test for the empirical comparison
of the performance of different algorithms (Dem
ˇ
sar,
2006) as shown in Figure 12. Using this approach,
which does not simply count wins, but rather takes
into account the relative performance of each algo-
rithm compared with every other algorithm on all of
the problems tackled, makes it easier to gain a clear
insight into which are most effective. Results demon-
strated that the AGP barter approach performed sig-
nificantly better than the other methods investigated
on the selected benchmarks as post-hoc tests pro-
duced very small p-values (0.002 and 0.00006) for
the differences between it and mlGP and stdGP re-
spectively. A p-value of 0.003 was reported for the
difference between pillage and stdGP.
4 CONCLUSIONS
The evidence we have presented in this study suggests
that AGP, which operates in adjudicated space for
selection of compatible candidate solutions (for the
purpose of recombination) is a promising methodol-
Figure 12: Friedman plot of test accuracy on classification.
Methods ranked from 1 to 4 where 1 is better.
ogy for evolutionary computation – performing con-
sistently well across the range of benchmarks studied.
This preliminary work would seem to demonstrate
that the method offers several useful advantages: it is
relatively simple to implement; produces small pro-
grams showing no evidence of bloat and, most impor-
tantly, is independent of the chosen representation.
As this is very much a preliminary study, we are
not able to provide any theoretical guarantees as to the
likely performance of AGP on problems other than
those presented in this investigation. As a next step,
we will examine the mechanics and theoretical un-
derpinnings of the method in greater detail. We will
also investigate several other adjudication strategies
for SR problems.
REFERENCES
Bache, K. and Lichman, M. (2013). UCI machine learning
repository.
Bassett, J., Kamath, U., and De Jong, K. (2012). A new
methodology for the GP theory toolbox. In Soule,
T. et al., editors, GECCO ’12: Proceedings of the
fourteenth international conference on Genetic and
evolutionary computation conference, pages 719–726,
Philadelphia, Pennsylvania, USA. ACM.
Beadle, L. and Johnson, C. (2008). Semantically driven
crossover in genetic programming. In Wang, J., ed-
itor, Proceedings of the IEEE World Congress on
Computational Intelligence, pages 111–116, Hong
Kong. IEEE Computational Intelligence Society,
IEEE Press.
Brooks, R. A. (1999). Cambrian intelligence: the early
history of the new AI. Mit Press.
Castelli, M., Vanneschi, L., and Silva, S. (2014). Prediction
of the unified parkinson’s disease rating scale assess-
ment using a genetic programming system with ge-
For Sale or Wanted: Directed Crossover in Adjudicated Space
103
ometric semantic genetic operators. Expert Systems
with Applications, 41(10):4608–4616.
Deb, K., Pratap, A., Agarwal, S., and Meyarivan, T. (2002).
A fast and elitist multiobjective genetic algorithm:
Nsga-ii. Evolutionary Computation, IEEE Transac-
tions on, 6(2):182–197.
Dem
ˇ
sar, J. (2006). Statistical comparisons of classifiers
over multiple data sets. The Journal of Machine
Learning Research, 7:1–30.
Koza, J. R. (1990). Genetic programming: A paradigm
for genetically breeding populations of computer pro-
grams to solve problems. Technical report.
Krawiec, K. (2012). Medial crossovers for genetic program-
ming. In Moraglio, A., et al., editors, Proceedings of
the 15th European Conference on Genetic Program-
ming, EuroGP 2012, volume 7244 of LNCS, pages
61–72, Malaga, Spain. Springer Verlag.
Krawiec, K. and Lichocki, P. (2009). Approximating geo-
metric crossover in semantic space. In Raidl, G., et al.,
editors, GECCO ’09: Proceedings of the 11th Annual
conference on Genetic and evolutionary computation,
pages 987–994, Montreal. ACM.
Krawiec, K. and Liskowski, P. (2015). Automatic deriva-
tion of search objectives for test-based genetic pro-
gramming. In Genetic Programming, pages 53–65.
Springer.
Krawiec, K. and O’Reilly, U.-M. (2014). Behavioral pro-
gramming: a broader and more detailed take on se-
mantic gp. In Proceedings of the 2014 conference
on Genetic and evolutionary computation, pages 935–
942. ACM.
Langdon, W. B. (1995). Directed crossover within genetic
programming. Research Note RN/95/71, University
College London, Gower Street, London WC1E 6BT,
UK.
Langdon, W. B. (1999). Size fair and homologous tree
genetic programming crossovers. In Banzhaf, W., et
al., editors, Proceedings of the Genetic and Evolution-
ary Computation Conference, volume 2, pages 1092–
1097, Orlando, Florida, USA. Morgan Kaufmann.
Lehman, J. and Stanley, K. O. (2008). Exploiting open-
endedness to solve problems through the search for
novelty. In ALIFE, pages 329–336.
Lehman, J. and Stanley, K. O. (2010). Efficiently evolving
programs through the search for novelty. In Branke,
J., et al., editors, GECCO ’10: Proceedings of the
12th annual conference on Genetic and evolutionary
computation, pages 837–844, Portland, Oregon, USA.
ACM.
Majeed, H. and Ryan, C. (2006). Using context-aware
crossover to improve the performance of GP. In Kei-
jzer, M., et al., editors, GECCO 2006: Proceedings of
the 8th annual conference on Genetic and evolution-
ary computation, volume 1, pages 847–854, Seattle,
Washington, USA. ACM Press.
Moraglio, A., Krawiec, K., and Johnson, C. G. (2012). Ge-
ometric semantic genetic programming. In Coello
Coello, C. A., et al., editors, Parallel Problem Solv-
ing from Nature, PPSN XII (part 1), volume 7491
of Lecture Notes in Computer Science, pages 21–31,
Taormina, Italy. Springer.
Moraglio, A. and Poli, R. (2004). Topological interpre-
tation of crossover. In Deb, K., et al., editors, Ge-
netic and Evolutionary Computation – GECCO-2004,
Part I, volume 3102 of Lecture Notes in Computer Sci-
ence, pages 1377–1388, Seattle, WA, USA. Springer-
Verlag.
CEC Moraglio, A. and Poli, R. (2005). Geometric land-
scape of homologous crossover for syntactic trees. In
Proceedings of the 2005 IEEE Congress on Evolution-
ary Computation (CEC-2005), volume 1, pages 427–
434, Edinburgh. IEEE.
Moraglio, A., Poli, R., and Seehuus, R. (2006). Geomet-
ric crossover for biological sequences. In Collet, P., et
al., editors, Proceedings of the 9th European Confer-
ence on Genetic Programming, volume 3905 of Lec-
ture Notes in Computer Science, pages 121–132, Bu-
dapest, Hungary. Springer.
Naredo, E., Trujillo, L., and Martinez, Y. (2013). Searching
for novel classifiers. In Krawiec, K., et al., editors,
Proceedings of the 16th European Conference on Ge-
netic Programming, EuroGP 2013, volume 7831 of
LNCS, pages 145–156, Vienna, Austria. Springer Ver-
lag.
Nguyen, Q. U., Nguyen, X. H., and O’Neill, M. (2009). Se-
mantic aware crossover for genetic programming: The
case for real-valued function regression. In Vanneschi,
L., et al., editors, Proceedings of the 12th European
Conference on Genetic Programming, EuroGP 2009,
volume 5481 of LNCS, pages 292–302, Tuebingen.
Springer.
Pawlak, T. P., Wieloch, B., and Krawiec, K. (2014). Re-
view and comparative analysis of geometric semantic
crossovers. Genetic Programming and Evolvable Ma-
chines, pages 1–36.
Ruberto, S., Vanneschi, L., Castelli, M., and Silva, S.
(2014). ESAGP – A semantic GP framework based
on alignment in the error space. In Nicolau, M., et al.,
editors, 17th European Conference on Genetic Pro-
gramming, volume 8599 of LNCS, pages 150–161,
Granada, Spain. Springer.
Trujillo, L., Mu
˜
noz, L., Naredo, E., and Mart
´
ınez, Y.
(2014). Neat, theres no bloat. In Genetic Program-
ming, pages 174–185. Springer.
Trujillo, L., Naredo, E., and Martinez, Y. (2013). Pre-
liminary study of bloat in genetic programming with
behavior-based search. In Emmerich, M., et al., ed-
itors, EVOLVE - A Bridge between Probability, Set
Oriented Numerics, and Evolutionary Computation
IV, volume 227 of Advances in Intelligent Systems
and Computing, pages 293–305, Leiden, Holland.
Springer.
Uy, N. Q., Hoai, N. X., O’Neill, M., McKay, B., and
Galvan-Lopez, E. (2009). An analysis of semantic
aware crossover. In Cai, Z., et al., editors, Proceedings
of the International Symposium on Intelligent Com-
putation and Applications, volume 51 of Communi-
cations in Computer and Information Science, pages
56–65. Springer.
ECTA 2015 - 7th International Conference on Evolutionary Computation Theory and Applications
104
Uy, N. Q., Hoai, N. X., ONeill, M., McKay, R. I.,
and Galv
´
an-L
´
opez, E. (2011). Semantically-based
crossover in genetic programming: application to real-
valued symbolic regression. Genetic Programming
and Evolvable Machines, 12(2):91–119.
Vanneschi, L., Castelli, M., and Silva, S. (2014). A survey
of semantic methods in genetic programming. Genetic
Programming and Evolvable Machines, 15(2):195–
214.
For Sale or Wanted: Directed Crossover in Adjudicated Space
105
