There is Noisy Lunch: A Study of Noise in Evolutionary Optimization
Problems
Juan J. Merelo
1
, Federico Liberatore
1
, Antonio Fern
´
andez Ares
1
, Rub
´
en Garc
´
ıa
2
, Zeineb Chelly
3
,
Carlos Cotta
4
, Nuria Rico
5
, Antonio M. Mora
6
and Pablo Garc
´
ıa-S
´
anchez
1
1
Dept. ATC, University of Granada, Granada, Spain
2
Escuela de Doctorado, University of Granada, Granada, Spain
3
Lab. RODCP, Institut Sup
´
erieur de Gestion, Granada, Tunisia
4
Dept. LCC, University of M
´
alaga, M
´
alaga, Spain
5
Dept. EIO, University of Granada, Granada, Spain
6
Dept. TSTC, University of Granada, Granada, Spain
Keywords:
Games, Evolutionary Optimization, Noise, Uncertainty, Noisy Fitness.
Abstract:
Noise or uncertainty appear in many optimization processes when there is not a single measure of optimality
or fitness but a random variable representing it. These kind of problems have been known for a long time,
but there has been no investigation of the statistical distribution those random variables follow, assuming in
most cases that it is distributed normally and, thus, it can be modelled via an additive or multiplicative noise
on top of a non-noisy fitness. In this paper we will look at several uncertain optimization problems that
have been addressed by means of Evolutionary Algorithms and prove that there is no single statistical model
the evaluations of the fitness functions follow, being different not only from one problem to the next, but in
different phases of the optimization in a single problem.
1 INTRODUCTION
Optimization methods usually need a crisp and fixed
value to work correctly. This value, usually called
cost or fitness, informs the procedure on how good is
the solution and is used to select particular solution
over others. This does not imply that these methods
need a single floating point number; since they are
based on comparisons, it is usually enough that the
values can be partially ordered. Multiobjective opti-
mization, for instance, just need to know when com-
paring two solutions whether one or the other is the
best or there can be no comparison between them. In
either case, the answer to the question “Is this solu-
tion better than the other?” needs to be either a crisp
‘Yes’ or ‘No’, or simply “Impossible to know”.
In many cases, however, the fitness or cost of a so-
lution cannot be described by a crisp value. In those
cases where there is uncertainty in the measure, that
is, in most real world, physical cases, such as the one
described in (Chiaberge et al., 1994), where a con-
trol system was optimized , or in the procedure used
to evaluate the solution, for instance, when using a
stochastic procedure to make that measure, the best
way to describe a solution will be a random variable,
not a single, or even a vector, value. In our research
we have found this happens in many different opti-
mization problems:
• When optimizing the layout of a web-page using
Simulated Annealing (SA) (Pe
˜
nalver and Merelo,
1998). Since SA is a stochastic procedure, the fit-
ness obtained by a solution will be a random vari-
able.
• When training any kind of neural network, such as
those in (Chiaberge et al., 1994; Merelo-Guerv
´
os
et al., 2001); in the second case we dealt with a
physical installation, introducing another kind of
randomness. Since training a neural network is a
stochastic procedure, the error rate obtained after
every training run will also follow a statistical dis-
tribution.
• When evolving game bots (autonomous agents)
(Mora et al., 2010). In this case, the uncertainty
arises from the problem itself; in games, several
factors such as the initial positions of the players
Merelo, J., Liberatore, F., Ares, A., García, R., Chelly, Z., Cotta, C., Rico, N., Mora, A. and García-Sánchez, P..
There is Noisy Lunch: A Study of Noise in Evolutionary Optimization Problems.
In Proceedings of the 7th International Joint Conference on Computational Intelligence (IJCCI 2015) - Volume 1: ECTA, pages 261-268
ISBN: 978-989-758-157-1
Copyright
c
2015 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
261
or the opponent’s behavior add certain stochastic
component so that final score will also be uncer-
tain or noisy; in some cases, too, the bot itself
will rely on probabilities to generate its behavior
(Fern
´
andez-Ares et al., 2014b), in which case two
different runs with exactly the same initial condi-
tions and opponent will also yield different scores.
In all these cases it cannot be said that there is
noise added to a crisp fitness. The fitness itself is a
statistical variable whose value arises from a stochas-
tic process, evaluation or training, however, we have
not seen an exhaustive research of the behavior of fit-
ness as a random variable.
That is why, after some initial study of noise in
a particular game in (Merelo et al., 2014), where our
findings indicated that, in some cases, noise followed
a Gamma, that is a skewed normal distribution and
proposing a solution to this using Wilcoxon compar-
ison as a selection operator, we dug into data dis-
covering that, even if the distribution in that partic-
ular case was always a gamma, the parameters of the
distribution were different, which meant that the ran-
dom variable behaved in different ways depending on
the particular individual, the state of evolution and, of
course, the particular problem.
This initial conclusion disagrees with the usual as-
sumptions in optimization in uncertain environments,
where it is frequent to assume that the noise is nor-
mally distributed and with a fixed sigma (Arnold,
2001). For instance, in the Black Box Optimization
Benchmarks (Hansen et al., 2009) the uncertainty was
simulated by adding noise centered in 0 and with a
Cauchy that is, a centered, sharp bell shaped distri-
bution, with different widths. Either multiplicative or
additive noise has been used in different occasions.
That is why in this paper we have collected data
from three different problems, which will be pre-
sented later on in this paper and tried to find a model
for the fitness using statistical tools. Our aim is to
eventually find a model that is as general as possible
and that is able to account for most sources of uncer-
tainty; failing that, to try and find selection operators
that are able to work with random variables in a nat-
ural way. However, this is not the focus of this paper
and, if it is eventually needed, is left as future work.
The rest of the paper is organized as follows. Next
we present the state of the art in evolutionary algo-
rithms in uncertain environments, to be followed by
a short presentation of the three problems with uncer-
tainty whose measures will be used in this paper in
Section 3. Results will be presented in Section 4, fol-
lowed by our conclusions.
2 STATE OF THE ART
The most recent and comprehensive review of the
state of the art in evolutionary algorithms in uncertain
environments was done by (Jin and Branke, 2005), al-
though recent papers such as (Qian et al., 2013; Bhat-
tacharya et al., 2014) and (Qian et al., 2014) include
brief updates. In that first survey the authors state that
uncertainty is categorized into noise, robustness is-
sues, fitness approximation, and time-varying fitness
functions, and then, different options for dealing with
it are proposed. In principle, the approach presented
in this paper was designed to deal with the first kind
of uncertainty, noise or uncertainty in fitness evalua-
tion, although it could be argued that there is uncer-
tainty in the true fitness as stated in the third category;
however, we do not think that is the case and, in gen-
eral, that third issue refers to the case in which ex-
pensive fitness functions are substituted by surrogate
functions which carry a certain amount of error. They
suggest several methods, based either on using aver-
aging or using a selection threshold over which one
or other individual is selected. But since then, several
other solutions have been proposed.
For scientists not concerned on solving the prob-
lem of noise, but on a straightforward solution of the
optimization problem without modification of exist-
ing tools and methodologies, an usual approach is
just to disregard the fact that the fitness is noisy and
use whatever value is returned by a single evaluation
or after re-evaluation each generation. This was the
option in our previous research in games although
one evaluation in some of those works consists, in
fact, in an average of several evaluations, in differ-
ent maps or considering different opponents, for in-
stance. (Mora et al., 2010; Mora et al., 2012; Liber-
atore et al., 2015) and evolution of neural networks
(Castillo et al., 1999; Merelo-Guerv
´
os et al., 2001)
and leads, if the population is large enough, to an
implicit averaging as mentioned in (Jin and Branke,
2005).
In fact, selection used in evolutionary algorithms
is also stochastic, so noise in fitness evaluation will
have the same effect as randomness in selection or a
higher mutation rate, which might make the evolu-
tion process easier and not harder in some particular
cases (Qian et al., 2013). In fact, Miller and Goldberg
proved that an infinite population would not be af-
fected by noise (Miller and Goldberg, 1996) and Jun-
Hua and Ming studied the effect of noise in conver-
gence rates (Jun-hua and Ming, 2013), proving that
an elitist genetic algorithm finds at least one solution,
although with a lowered convergence rate.
But real populations are finite, so the usual ap-
ECTA 2015 - 7th International Conference on Evolutionary Computation Theory and Applications
262
proach to dealing with fitness with a degree of ran-
domness is to increase the population size to a value
bigger than would be needed in a non-noisy environ-
ment. In fact, it has been recently proved that us-
ing sex, that is, crossover, is able to deal successfully
with noise (Friedrich et al., 2015), while an evolution-
ary algorithm based mainly on mutation, such as the
µ+1 EA, or evolutionary programming, would suffer
a considerable degradation of performance. However,
crossover is part of the standard kit of evolutionary
algorithms, so using it and increasing the population
size has the advantage that no special provision or
change in the implementation has to be made, just dif-
ferent values of the standard parameters.
Another more theoretically sound way is using a
statistical central tendency indicator, which is usu-
ally the average; which happens to be equal to the
median in the case of the random variable following
the normal distribution. This strategy is called ex-
plicit averaging by Jin and Branke and is used, for
instance, in (Jun-hua and Ming, 2013). Averaging
decreases the variance of fitness but the problem is
that it is not clear in advance what would be the sam-
ple size used for averaging (Aizawa and Wah, 1994).
We have used it in some cases but in a different way:
not re-evaluating individuals every additional genera-
tion and computing the average but computing the fit-
ness using the average of several evaluations, usually
five or more (Mora et al., 2012). Most authors use
several measures of fitness for each new individual
(Costa et al., 2013), although other averaging strate-
gies have also been proposed, like averaging over the
neighbourhood of the individual or using resampling,
that is, more measures of fitness in a number which is
decided heuristically (Liu et al., 2014). This assumes
that there is, effectively, an average of the fitness val-
ues which is true for Gaussian random noise and other
distributions such as Gamma or Cauchy, but not nec-
essarily for all distributions.
To the best of our knowledge, other measures like
the median which might be more adequate for certain
noise models, but which is the same for the normal
distribution usually attributed to noise, have not been
tested; the median always exists, while the average
might not exist for non-centrally distributed variables.
Besides, most models keep the number of evaluations
fixed and independent of its value, which might result
in bad individuals being evaluated many times before
being discarded; some authors have proposed resam-
pling, (Rada-Vilela et al., 2014; Rakshit et al., 2014),
which will effectively increase the number of evalu-
ations and thus slow down the search. In any case,
using average is also a small change to the algorithm
framework, requiring only using as new fitness func-
tion the average of several evaluations.
These two approaches that are focused on the eval-
uation process might be complemented with changes
to the selection process. For instance, using a thresh-
old (Rudolph, 2001; Rakshit et al., 2014) that is re-
lated to the noise characteristics to avoid making com-
parisons of individuals that might, in fact, be very
similar or statistically the same; this is usually called
threshold selection and can be applied either to ex-
plicit or implicit averaging fitness functions. The al-
gorithms used for solution, themselves, can be also
tested, with some authors proposing, instead of tak-
ing more measures, testing different solvers (Cauwet
et al., 2014), some of which might be more af-
fected by noise than others. However, recent papers
have proved that sampling might be ineffective (Qian
et al., 2014) in some types of evolutionary algorithms,
adding running time without an additional benefit in
terms of performance. This is one lead we will use in
the current paper.
Any of these approaches do have the problem of
statistical representation of the true fitness, even more
so if there is not such a thing, but several measures
that represent, as a set the fitness of an individual.
This is what we are going to use in this paper, where
we present a method that uses resampling via an in-
dividual memory and use either explicit averaging or
statistical tests like the non-parametric Wilcoxon test.
First we will examine and try to find the shape of the
noise that actually appears in some games and other
optimization problems; then we will check in this pa-
per what is the influence on the quality of results of
these two strategies and which one, if any, is the best
when working in noisy environments.
3 PROBLEMS USED IN THIS
PAPER
The fitness of three different problems, all of them re-
lated to computational intelligence in games, has been
used in this paper: generation of character backsto-
ries in artificial worlds, described in subsection 3.1,
optimization of bots for playing the real time strat-
egy game Planet Wars in 3.2, and optimization of
the ghost team in Ms. Pac-Man, which will be de-
scribed in subsection 3.3. These three problems have
been chosen for several reasons, the most important
of which is that we have been working on them and
thus have data available; another reason is that the ori-
gin of the uncertainty is different in the three cases.
In the case of MADE, fitness is computed through a
simulation; in the case of Planet Wars, the bot them-
selves have a random component, with its represen-
There is Noisy Lunch: A Study of Noise in Evolutionary Optimization Problems
263
tation including probabilities of different courses of
action; and finally in Ms. Pac-Man, it is due to the
nature of the game itself. It is not a complete repre-
sentation of all causes of uncertainty, but the sample
is big enough so that we can generalize the results ob-
tained, which will be presented in the next section.
3.1 Creation of Character Backstories
MADE (Massive Drama Engine for non-player char-
acters) (Garc
´
ıa-Ortega et al., 2014) is a framework for
the automatic generation of virtual worlds that allow
the emergence of backstories for secondary charac-
ters that can later on be included in videogames. In
this context, an archetype is a well-known behaviour
present in the imaginary collective (for example, a
“hero” or a “villain”). Given a fitness to model the ex-
istence of different N
a
archetypes for a virtual world,
MADE uses a genetic algorithm to optimize the pa-
rameter values of a Finite State Machine (FSM) that
model the agents of that world. For the evaluation,
a world is simulated using this parameter set, and
the log is analyzed to detect behaviours of the world
agents to match with the desired archetypes.
As the evolved parameters are the probabilities
to jump from one state to another in the FSM, each
fitness evaluation is performed executing the virtual
world five times per individual, obtaining the average
fitness. Selection is, therefore, performed comparing
this average fitness, using a binary tournament in this
case. Fitness values range from 0 and N
a
and are cal-
culated taking into account the rate of occurrence of
the archetypes in the execution log.
3.2 Real Time Strategy: Planet Wars
Planet Wars (Fern
´
andez-Ares et al., 2011) is a simple
Real-Time strategy (RTS) game. RTS games are not
turn-based and their objective is to defeat the enemy
using resources available in the map to build units and
structures.
Computational intelligence methods have been
applied to Planet Wars since it provides a simplifi-
cation of the elements of the RTS: one kind of units
(spaceships) and one kind of resources and structures
(planets). Spaceships are automatically generated in
the planets owned by the player and they are used to
conquer the enemy planets, as this is the objective of
the game.
In this paper we are using the results obtained
from the Genebot algorithm (Garc
´
ıa-S
´
anchez et al.,
2014). This algorithm optimizes the parameters of a
hand-coded FSM that indicates how many ships send
from each planet to attack or reinforce another planet
depending of some other values (such as the distance
between planets). The generated bot is not determin-
istic, as some of the jumps of the states are based in
probabilities. Fitness is calculated confronting five
times the bot obtained from the parameter set of the
FSM against a competitive hand-coded bot. The re-
sult of each match takes into account the ‘slope’ of
the number of player spaceships during the time of the
match. Positive results mean that the bot won, as the
slope will be positive, and vice versa. Theoretical val-
ues are in the range [−1, 1], although these values are
impossible to attain in the game. A value of -1 would
indicate that the player lost all their ships in the initial
time, while 1 would mean the contrary: it generated
all the spaceships and won in the initial time. The
fitness of an individual is the sum of all five results,
and therefore being in the range [−5, 5]. This fitness
has been explained in more detail in (Fern
´
andez-Ares
et al., 2014a).
3.3 Ghost Team Optimization
Ms. Pac-Man is a variant of the famous Pac-Man
game that extends its mechanics with features such
as the inclusion of a random event that reverses the
direction of the ghosts. This game is used in the Ms.
Pac-Man vs Ghosts competition, where participants
can submit controllers for both Ms. Pac-Man and the
Ghost Team, the first trying to maximize its score,
the second trying to minimize Ms. Pac-Man’s. The
framework used to test the methodology analyzed de-
fines the following restrictions for the Ghost Team:
• A ghost can never stop and if it is in a corridor it
must move forward.
• A ghost can choose its direction only at a junction.
• Every time a ghost is at a junction the controller
has to provide a direction from the set of feasible
directions.
• After 4000 game ticks, a level is considered com-
pleted and the game moves on to the next one.
Also, in this method, which was published in (Lib-
eratore et al., 2015), the fitness of each individual is
computed as the maximum score obtained by eight
different Ms. Pac-Man controllers. Some of these
controllers were the best in past editions of the inter-
national competition, so they are very tough rivals for
the ghost team.
4 EXPERIMENTS AND RESULTS
With the problems presented above, data on fitness
was collected by selecting a few random individu-
ECTA 2015 - 7th International Conference on Evolutionary Computation Theory and Applications
264
als in every generation and measuring its fitness 100
times. Thus, every individual is represented by a
random variable with the 100 measures taken with
its fitness. According to the usual assumptions, this
random variable should follow a normal distribution,
with probably different σ and centered on the true
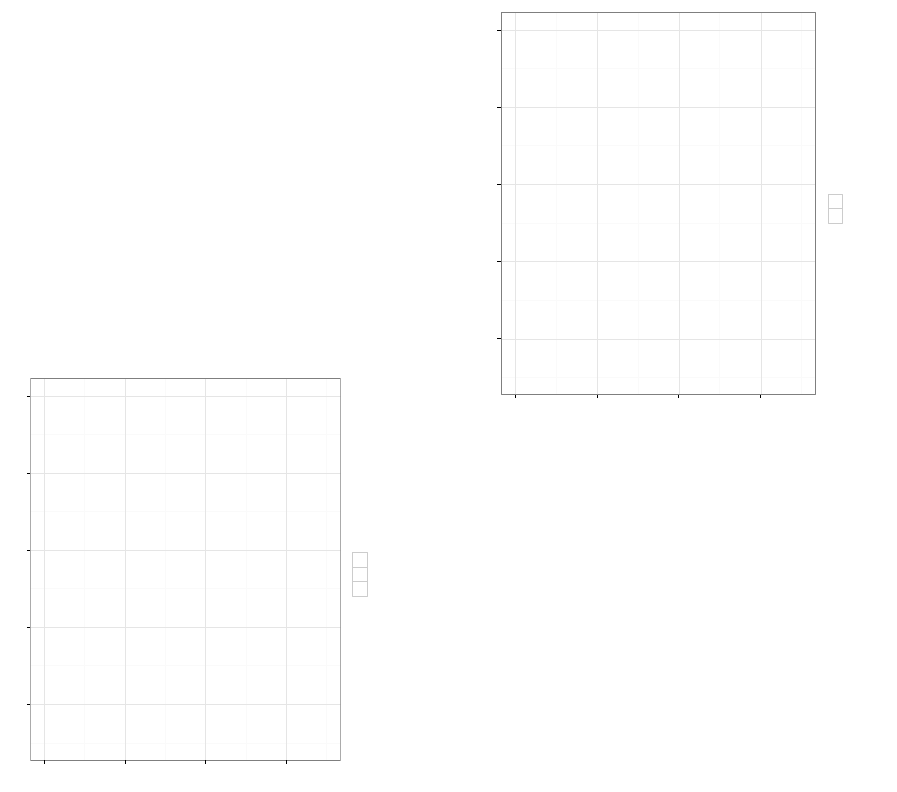
fitness value. In order to check that hypothesis, we
plotted the skewness, that is, asymmetry of the distri-
bution, and kurtosis, which is a parameter related to
the shape of the distribution. A symmetrical distribu-
tion like the normal distribution has a skewness and
kurtosis equal to 0; asymmetric distributions, such
as the Gamma that we had found in previous papers
(Merelo et al., 2014), has non-zero skewness and kur-
tosis which are related to their α and κ parameters, for
instance. Any random variable has skewness and kur-
tosis at any rate, and we have computed and plotted
them in the next figures, where skewness is plotted as
x axis against kurtosis in the y axis.
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
0
2
4
6
8
−1 0 1 2
Skewness
Kurtosis
Gen
●
●
●
Gen 64
Gen 128
Gen 256
Figure 1: Skewness and kurtosis for fitness in several gen-
erations of the MADE problem. Different colors represent
diffent generations.
Figure 1 represents them for the MADE problem
for which we took measures for a variable amount of
individuals every generation, from 100 in generation
64 to around 50 in the latest generation. A curious
convergence, but without reaching, the normal distri-
bution is observed as generations proceed; in the first
generations, values of skewness and kurtosis are quite
high and correspond to arbitrary distribution (Beta or
uniform), however, as the simulation proceeds, val-
ues approach zero. However, they do not converge
exactly to 0, meaning that, even if uncertainty can be
approached by a normal distribution, that approxima-
tion would only be correct for the latest generations
of the simulation. In general, individual fitness will
follow an arbitrary distribution with a general shape
and asymmetry.
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
0
2
4
6
8
−1 0 1 2
Skewness
Kurtosis
Gen
●
●
Gen 1
Gen 50
Figure 2: Skewness and kurtosis for fitness in several gen-
erations of the Planet Wars problem. Different colors repre-
sent different generations.
The shape of the graph for the Planet Wars prob-
lem, shown in Figure 2 for two different generations,
is different but has some similarities. The disper-
sion also decreases as evolution proceeds, with shape
becoming closer to normal distribution in generation
50. However, initial kurtosis is quite high and values
above 2 and below 0 are found even late in the evolu-
tion. Noise is, thus, noisy and does not conform to a
single shape, even less a normal one.
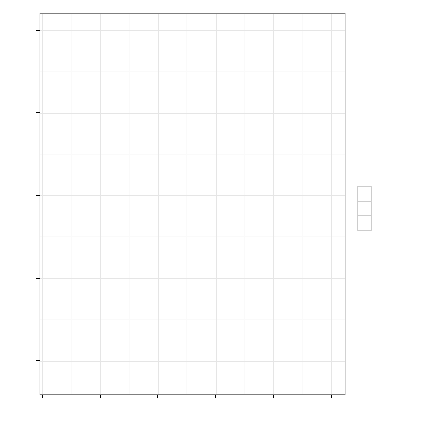
The graph for the final problem, Ms. Pac-Man,
is different in several aspects, and is shown in Figure
3. First we have to take into account, as explained
in 3.3, that differently from the previous cases, the
fitness for a ghost team is the maximum, not an av-
erage of several values. This causes a curious behav-
ior of fitness: in the first generation, several individ-
uals have crisp values; however, this is decreasingly
so, becoming more “random” as generations proceed,
that is, the set of values the fitness has got starts to
have many different values while in the first genera-
tions it had one or a few. That is why the behavior
shown in the graph is completely different: distribu-
tions get increasingly asymmetric and its shape more
different from a normal distribution and more like a
Beta distribution. Even if the trend is different from
the other two problems, the overall aspect is the same:
there is no single distribution that is able to describe
the shape of fitness with an uncertainty component.
There is Noisy Lunch: A Study of Noise in Evolutionary Optimization Problems
265
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
0
25
50
75
100
−2.5 0.0 2.5 5.0 7.5 10.0
Skewness
Kurtosis
Gen
●
●
●
Gen 1
Gen 25
Gen 50
Figure 3: Skewness and kurtosis for fitness in several gen-
erations of the Ms. Pac-Man problem. Different colors rep-
resent different generations.
5 CONCLUSIONS
In this paper we set out to study the statistical distri-
bution followed by the fitness of single individuals in
several problems in the area of games in which we
have worked. These problems: MADE, Planet Wars,
and Ms. Pac-Man, have different natures and ways
to compute the fitness, but all of them have in com-
mon that fitness is not a fixed number but a random
variable. We have set out to do to prove the hypoth-
esis that not only noise does not follow the normal,
or Gaussian, distribution or other centrally-distributed
models such as Cauchy, which have been used repeat-
edly in the literature, but that it does not follow a sin-
gle distribution even considering a single problem.
The study presented here proves that hypothesis.
The best way to describe statistical variables is using
two parameters: kurtosis and skewness. These two
parameters have been computed and plotted for each
one of the problems, proving that not only distribu-
tions are asymmetrical and not bell-shaped, but that
its shape changes within a single problem and in dif-
ferent stages of the computation. In some case, like
MADE, it seems clear that due to the fact that aver-
ages are used as a representative for selection, those
individuals whose fitness is closer to a central shape
are oversampled and thus selected preferably, with
almost-central individuals in the latest stages being a
consequence of this fact. In other cases, when fitness
is computed in a different way or selection takes an-
other form, the effect is exactly the opposite. At any
rate, using averages, after the study done in this paper,
is discouraged since in many cases and almost always
in the early stages of the evolution, fitness, being a
random variable, does not pass a centrality test and
it might not even have an average. A better way of
comparing any fitness with uncertainty would be, as
proposed by the authors, using non-parametric tests
such as the Wilcoxon test that impose a partial order
on the individuals (Merelo et al., 2014); this partial
order can be used, in several different ways, for selec-
tion.
The fact that there is no single model representing
the distribution of fitness also implies that it is an error
to use centrally distributed random variables added to
a crisp fitness to test operators and algorithms that
operate in uncertainty. Either real values should be
used, such as the ones proposed above, or a distribu-
tion with varying shape and symmetry such as Beta
should be used. However, in this case we should take
into account that “true” or “crisp” fitness does not re-
ally exist, so any modelization of uncertain fitness that
uses noise added to crisp fitness is, in the more gen-
eral case, wrong, although it might obviously be true
in some cases. If the fitness evaluation is expensive
and tests want to be performed for some new oper-
ators, the best way to model uncertainty would be to
use different models applied to every individuals, with
different skewness and kurtosis. However, this would
be only a first-order approximation and it might favor
methods that use averages.
What remains to be done is to effectively apply
Wilcoxon-based comparisons to the problems above,
but since they are costly to evaluate, we will try to cre-
ate a benchmark for problems with uncertainty which
reflects in the best possible way how fitness is orga-
nized in a wide array of problems. In order to do that
we will try to examine as many uncertain problems as
possible and deduce what would be the most general
model.
ACKNOWLEDGEMENTS
This work has been supported in part by projects
TIN2014-56494-C4-3-P (Spanish Ministry of Econ-
omy and Competitiveness), SPIP2014-01437 (Di-
recci
´
on General de Tr
´
afico), PRY142/14 (Fundaci
´
on
P
´
ublica Andaluza Centro de Estudios Andaluces en la
IX Convocatoria de Proyectos de Investigaci
´
on), and
project V17-2015 of the Microprojects program 2015
from CEI BioTIC Granada.
ECTA 2015 - 7th International Conference on Evolutionary Computation Theory and Applications
266
REFERENCES
Aizawa, A. N. and Wah, B. W. (1994). Scheduling of ge-
netic algorithms in a noisy environment. Evolutionary
Computation, 2(2):97–122.
Arnold, D. (2001). Evolution strategies in noisy
environments-a survey of existing work. In Theoret-
ical aspects of evolutionary computing, pages 239–
250. Springer-Verlag.
Bhattacharya, M., Islam, R., and Mahmood, A. (2014). Un-
certainty and evolutionary optimization: A novel ap-
proach. In Industrial Electronics and Applications
(ICIEA), 2014 IEEE 9th Conference on, pages 988–
993.
Castillo, P. A., Gonz
´
alez, J., Merelo-Guerv
´
os, J.-J., Prieto,
A., Rivas, V., and Romero, G. (1999). G-Prop-III:
Global optimization of multilayer perceptrons using
an evolutionary algorithm. In GECCO-99: Proceed-
ings Of The Genetic And Evolutionary Computation
Conference, page 942.
Cauwet, M.-L., Liu, J., Teytaud, O., et al. (2014). Al-
gorithm portfolios for noisy optimization: Compare
solvers early. In Learning and Intelligent Optimiza-
tion Conference.
Chiaberge, M., Merelo, J. J., Reyneri, L. M., Prieto, A., and
Zocca, L. (1994). A comparison of neural networks,
linear controllers, genetic algorithms and simulated
annealing for real time control. In Proceedings of the
European Symposium on Artificial Neural Networks.
Index available from http://www.dice.ucl.ac.be/esann/
proceedings/esann1994/content.htm, pages 205–210.
D facto (Brussels). Available from http://polimage.
polito.it/ marcello/articoli/esann.94.jj.pdf and a
scanned version from http://www.dice.ucl.ac.be/
Proceedings/esann/esannpdf/es1994-533-S.pdf.
Costa, A., Vargas, P., and Tin
´
os, R. (2013). Using explicit
averaging fitness for studying the behaviour of rats in
a maze. In Advances in Artificial Life, ECAL, vol-
ume 12, pages 940–946.
Fern
´
andez-Ares, A., Garc
´
ıa-S
´
anchez, P., Mora, A. M.,
Castillo, P. A., and Guerv
´
os, J. J. M. (2014a). De-
signing competitive bots for a real time strategy
game using genetic programming. In Camacho, D.,
G
´
omez-Mart
´
ın, M. A., and Gonz
´
alez-Calero, P. A.,
editors, Proceedings 1st Congreso de la Sociedad
Espa
˜
nola para las Ciencias del Videojuego, CoSE-
Civi 2014, Barcelona, Spain, June 24, 2014., volume
1196 of CEUR Workshop Proceedings, pages 159–
172. CEUR-WS.org.
Fern
´
andez-Ares, A., Mora, A. M., Arenas, M. G., Guerv
´
os,
J. J. M., Garc
´
ıa-S
´
anchez, P., and Valdivieso, P.
A. C. (2014b). Co-evolutionary optimization of au-
tonomous agents in a real-time strategy game. In
Esparcia-Alc
´
azar, A. I. and Mora, A. M., editors, Ap-
plications of Evolutionary Computation - 17th Eu-
ropean Conference, EvoApplications 2014, Granada,
Spain, April 23-25, 2014, Revised Selected Papers,
volume 8602 of Lecture Notes in Computer Science,
pages 374–385. Springer.
Fern
´
andez-Ares, A., Mora, A. M., Guerv
´
os, J. J. M.,
Garc
´
ıa-S
´
anchez, P., and Fernandes, C. (2011). Op-
timizing player behavior in a real-time strategy game
using evolutionary algorithms. In IEEE Congress on
Evolutionary Computation, pages 2017–2024. IEEE.
Friedrich, T., K
¨
otzing, T., Krejca, M., and Sutton, A. M.
(2015). The Benefit of Sex in Noisy Evolutionary
Search. ArXiv e-prints.
Garc
´
ıa-Ortega, R. H., Garc
´
ıa-S
´
anchez, P., Mora, A. M., and
Merelo, J. (2014). My life as a sim: evolving unique
and engaging life stories using virtual worlds. In AL-
IFE 14: The Fourteenth Conference on the Synthesis
and Simulation of Living Systems, volume 14, pages
580–587.
Garc
´
ıa-S
´
anchez, P., Fern
´
andez-Ares, A., Mora, A. M., Val-
divieso, P. A. C., Gonz
´
alez, J., and Guerv
´
os, J. J. M.
(2014). Tree depth influence in genetic programming
for generation of competitive agents for RTS games.
In Esparcia-Alc
´
azar, A. I. and Mora, A. M., editors,
Applications of Evolutionary Computation - 17th Eu-
ropean Conference, EvoApplications 2014, Granada,
Spain, April 23-25, 2014, Revised Selected Papers,
volume 8602 of Lecture Notes in Computer Science,
pages 411–421. Springer.
Hansen, N., Finck, S., Ros, R., and Auger, A. (2009).
Real-parameter black-box optimization benchmark-
ing 2009: Noisy functions definitions.
Jin, Y. and Branke, J. (2005). Evolutionary optimization
in uncertain environments - a survey. IEEE Trans-
actions on Evolutionary Computation, 9(3):303–317.
cited By (since 1996)576.
Jun-hua, L. and Ming, L. (2013). An analysis on con-
vergence and convergence rate estimate of elitist ge-
netic algorithms in noisy environments. Optik - In-
ternational Journal for Light and Electron Optics,
124(24):6780 – 6785.
Liberatore, F., Mora, A., Castillo, P., and Merelo, J. (2015).
Comparing heterogeneous and homogeneous flocking
strategies for the ghost team in the game of ms. pac-
man. Computational Intelligence and AI in Games,
IEEE Transactions on, PP(99):1–1.
Liu, J., St-Pierre, D. L., and Teytaud, O. (2014). A math-
ematically derived number of resamplings for noisy
optimization. In Proceedings of the 2014 Conference
Companion on Genetic and Evolutionary Computa-
tion Companion, GECCO Comp ’14, pages 61–62,
New York, NY, USA. ACM.
Lucas, S. M. (2007). Ms pac-man competition. ACM
SIGEVOlution, 2(4):37–38.
Merelo, J. J., Castillo, P. A., Mora, A., Fern
´
andez-Ares,
A., Esparcia-Alc
´
azar, A. I., Cotta, C., and Rico, N.
(2014). Studying and tackling noisy fitness in evo-
lutionary design of game characters. In Rosa, A.,
Merelo, J. J., and Filipe, J., editors, ECTA 2014 - Pro-
ceedings of the International Conference on Evolu-
tionary Computation Theory and Applications, pages
76–85.
Merelo-Guerv
´
os, J.-J., Prieto, A., and Mor
´
an, F.
(2001). Optimization of classifiers using ge-
netic algorithms, chapter 4, pages 91–108. MIT
press. ISBN: 0262162016; draft available from
http://geneura.ugr.es/pub/papers/g-lvq-book.ps.gz.
Miller, B. L. and Goldberg, D. E. (1996). Genetic algo-
rithms, selection schemes, and the varying effects of
noise. Evolutionary Computation, 4(2):113–131.
There is Noisy Lunch: A Study of Noise in Evolutionary Optimization Problems
267
Mora, A. M., Fern
´
andez-Ares, A., Merelo-Guerv
´
os, J. J.,
Garc
´
ıa-S
´
anchez, P., and Fernandes, C. M. (2012).
Effect of noisy fitness in Real-Time Strategy games
player behaviour optimisation using evolutionary al-
gorithms. J. Comput. Sci. Technol., 27(5):1007–1023.
Mora, A. M., Montoya, R., Merelo, J. J., Snchez, P. G.,
Castillo, P. A., Laredo, J. L. J., Martnez, A. I., and
Espacia, A. (2010). Evolving Bots AI in Unreal. In
di Chio et al., C., editor, Applications of Evolutionary
Computing, Part I, volume 6024 of Lecture Notes in
Computer Science, pages 170–179, Istanbul, Turkey.
Springer-Verlag.
Pe
˜
nalver, J. G. and Merelo, J.-J. (1998). Opti-
mizing web page layout using an annealed ge-
netic algorithm as client-side script. In Pro-
ceedings PPSN, Parallel Problem Solving from
Nature V, number 1967 in Lecture Notes in
Computer Science, pages 1018–1027. Springer-
Verlag. http://www.springerlink.com/link.asp?id=
2gqqar9cv3et5nlg.
Qian, C., Yu, Y., Jin, Y., and Zhou, Z.-H. (2014). On the
effectiveness of sampling for evolutionary optimiza-
tion in noisy environments. In Bartz-Beielstein, T.,
Branke, J., Filipic, B., and Smith, J., editors, Paral-
lel Problem Solving from Nature PPSN XIII, volume
8672 of Lecture Notes in Computer Science, pages
302–311. Springer International Publishing.
Qian, C., Yu, Y., and Zhou, Z.-H. (2013). Analyzing evo-
lutionary optimization in noisy environments. CoRR,
abs/1311.4987.
Rada-Vilela, J., Johnston, M., and Zhang, M. (2014). Popu-
lation statistics for particle swarm optimization: Re-
sampling methods in noisy optimization problems.
Swarm and Evolutionary Computation, 0(0):–. In
press.
Rakshit, P., Konar, A., and Nagar, A. (2014). Artificial bee
colony induced multi-objective optimization in pres-
ence of noise. In Evolutionary Computation (CEC),
2014 IEEE Congress on, pages 3176–3183.
Rudolph, G. (2001). A partial order approach to noisy fit-
ness functions. In Proceedings of the IEEE Confer-
ence on Evolutionary Computation, ICEC, volume 1,
pages 318–325.
Wilcoxon, F. (1945). Individual comparisons by ranking
methods. Biometrics Bulletin, 1(6):80–83.
ECTA 2015 - 7th International Conference on Evolutionary Computation Theory and Applications
268
