Evolutionary Nonlinear Model Output Statistics for Wind Speed
Prediction using Genetic Programming
Kisung Seo and Byeongyong Hyeon
Department Electronic Engineering, Seokyeong University, Jungneung-Dong 16-1, Sungbuk-Gu, Seoul, South Korea
Keywords: Wind Speed Prediction, Nonlinear MOS, Genetic Programming.
Abstract: Wind speed fluctuates heavily and affects a smaller locality than other weather elements. Wind speed is
heavily fluctuated and quite local than other weather elements. It is difficult to improve the accuracy of
prediction only in a numerical prediction model. An MOS (Model Output Statistics) technique is used to
correct the systematic errors of the model using a statistical data analysis. Most previous MOS (Model
Output Statistics) used a linear regression model, but they are hard to solve nonlinear natures of the weather
prediction. In order to solve the problem of a linear MOS, a nonlinear compensation technique based on
evolutionary computation is introduced as a new attempt. We suggest a nonlinear regression method using
GP (Genetic Programming) based symbolic regression to generate an open-ended nonlinear MOS. The new
nonlinear MOS can express not only nonlinearity much more extensively by involving all mathematical
functions, including transcendental functions, but also unlimited orders with a dynamic selection of
predictors due to the flexible tree structure of GP. We evaluate the accuracy of the estimation by GP based
nonlinear MOS for the three days wind speed prediction for Korean regions. The training period of 2007-
2009, 2011 year is used, the data of 2012 year is for verification, and 2013 year is adopted for test. This
method is then compared to the linear MOS and shows superior results.
1 INTRODUCTION
Due to the development of information technology,
the collection of a huge weather data becomes
easier. The installation of AWS (Automatic Weather
Station) is increasing continuously, which can
observe data
of weather elements such as
temperature, precipitation, and wind speed
automatically via sensors and computers. Thus the
importance of numerical prediction weather models
using long term statistical data has increased. The
necessity for reliable predictions for weather and
meteorological information about the future
atmospheric state is essential (Kim, 2002).
UM (Unified Model, United Kingdom Met
Office) developed in the UK, is widely used in the
world as a forecast model. However, most of the
NWP models including UM cannot predict wind
speed accurately because of the intense fluctuations
and local variations by region. Therefore, a
compensation technique such as MOS is required to
enhance the accuracy of prediction outputs for
numerical models (Glahn 1972, Termonia 2007,
Vannitsem 2008, Yu 2011). The MOS technique
aims at correcting current forecasts based on
statistical information gathered from past forecasts.
A few indices (temperature, relative humidity, wind
speed and wind direction) are expected to be
improved by the MOS, compared to the UM forecast
alone.
A regression analysis based technique using
MLR, PLSR, and PCR (Palutikof, 2002) was studied
to predict wind speed for a northwest region of
Europe. Prediction method using an improved time
series and Wavelet technique on wind speed and
wind pressure was proposed (Liu, 2009). The linear
regression methods are still widely used in those
systems. The MOS currently used in KMA for short-
range prediction of temperature has adopted a linear
regression too.
However, most of the previous approaches are
based on the linear models, there is a limitation in
the optimization of the prediction model. Further, a
linear regression is not adequate to represent non-
linear behaviors between MOS and predictor
variables. Moreover, this approach requires the fixed
and entire number of predictor variables to construct
a regression model regardless of various locations,
Seo, K. and Hyeon, B..
Evolutionary Nonlinear Model Output Statistics for Wind Speed Prediction using Genetic Programming.
In Proceedings of the 7th International Joint Conference on Computational Intelligence (IJCCI 2015) - Volume 1: ECTA, pages 287-292
ISBN: 978-989-758-157-1
Copyright
c
2015 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
287

seasons, and time intervals, but it may not be
efficient to use same and entire variables in the
regression model for different conditions. Therefore,
it has fundamental limitations to manage the highly
complex nature of weather predictions.
Some artificial neural network based approach
was conducted to reduce prediction error for wind
speed (Sweeney, 2011). However, this method can
represent nonlinear behaviors of the model, but it
still requires the fixed and entire number of
variables. Also, it only gives a set of connection
weights among nodes, as a result, which is not
explainable like a black box.
To overcome these problems of existing
approaches, we have proposed a seemingly more
efficient approach that optimizes a compensation
model for temperature predictions through nonlinear
combinations of potential predictors using GP
(Genetic Programming) (Koza, 1992). Genetic
Programming is an evolutionary optimization
technique based on Darwinian principles, which
enables to represent the flexible structures of the
model. GP based nonlinear regression can
effectively search open-ended space for order and
coefficient of equations with smaller variables. It is
also a powerful means to generate open-ended high-
order equations and complex nonlinear forms using
transcendental functions. This allows it to solve the
limitations of a linear regression model.
In this paper, a generation technique of the
nonlinear regression model for MOS using Genetic
Programming is proposed. A GP based symbolic
regression approach is used to perform a nonlinear
regression for correcting (or compensating) a wind
prediction model. This paper is organized as follows.
Section 2 introduces a genetic programming based
method for non-linear MOS. Section 3 describes a
notion of numerical weather prediction. Section 4
presents experimental results of temperature forecast
for Korean regions by the proposed GP_MOS
method, and Section 5 concludes the paper.
2 AWS, UM, AND MOS
2.1 AWS
An AWS (Automatic Weather Station) is to enable
measurements for weather elements from remote
areas. An AWS will typically consist of a weather-
proof enclosure containing the data logger,
rechargeable battery, telemetry and the
meteorological sensors with an attached solar panel
or wind turbine and mounted upon a mast. Most
automatic weather stations have a thermometer for
measuring temperature, anemometer for measuring
wind speed, wind vane for measuring wind direction,
hygrometer for measuring humidity, and barometer
for measuring atmospheric pressure. 600 AWSs are
available in South Korea as shown in Figure 1
(Korea Meteorological Administration). Darker
colors mean higher altitude.
Figure 1: Map of AWS stations in Korea.
2.2 UM
The UM (Unified Model) is a numerical weather
prediction and climate modeling tool originally
developed by the United Kingdom Met Office, and
now both used and further developed by many
weather-forecasting agencies around the world.
Table 1: Potential Predictors.
Types Potential Predictors
Air Temperature TS, T8, T7, T5
Thickness DZ18, DZ17, DZ85
Dew-point
TDD8, TDD7,
TDD5
Relative humidity RH8, RH7, RH5
Mean RH
MRH17, MRH15,
MRH85
Zonal wind US, U8, U7, U5
Meridional wind VS, V8, V7, V5
Wind speed
WSS, WS8, WS7,
WS5
Wind direction
WDS, WD8, WD7,
WD5
Lapse rate LR87, LR85
Total rain amount(3hr
accumulated)
PCP
Etc. KI, SWTI
ECTA 2015 - 7th International Conference on Evolutionary Computation Theory and Applications
288
The KMA (Korea Meteorological Administration)
has an operational 12km resolution global
forecasting system utilizing the Unified Model. The
UM is run twice a day (00 and 12 UTC) producing
forecasts from 6 hours to 66 hours at a 3 hours
interval. The total 37 potential predictors of UM that
were employed in our work including temperature,
humidity, wind speed and accumulated rainfall as
shown in Table I.
2.3 MOS (Model Output Statistics)
Numerical weather prediction models contain
numerous parameterizations for physical processes
and numerical stability. Parameterizations are based
on physical laws, but typically contain parameters
whose values are not known precisely.
The MOS technique aims at correcting current
forecasts based on statistical information gathered
from past forecasts. In its most popular form, it is
based on a linear relation between the reference
variables that we want to predict a set of model
predictors at a certain lead time The MOS currently
used in KMA for short term prediction of
temperature has adopted a linear regression with
equation (1). It consists of a linear combination of
predictors (or predictor variables). It is a
compensated amount for the corrected forecast.
∆WSS
⋯
(1)
where,
, i=1, …, N, represents one of the
potential predictors in Table 1.
As before mentioned in the introduction, one of
the problems with this method is that the entire large
number of predictor variables should be included to
construct a MOS model for diverse situations. It may
be suffering from multicollinearity which the
coefficient estimates of the multiple regression may
change erratically in response to small changes in
the model or the data by multiple predictor variables
in a regression model are highly correlated. The
other problem is that the above linear operation is
inappropriate to model non-linear relationships
between the MOS for temperature prediction and its
predictor variables.
3 GENETIC PROGRAMMING
BASED MODEL OUTPUT
STATISTICS
In recent years, evolutionary optimization
techniques based on Darwinian principles have
become popular to solve complex NP hard problems.
Genetic programming is an extension of the genetic
algorithm and can manipulate variable-sized entities.
The tree representation of GP chromosomes, as
compared with the string representation typically
used in GA, gives GP more flexibility to encode
solution representations for many model design and
optimization applications.
The GP algorithm starts with an initial
population of arbitrarily generated individuals.
These individuals, represented by trees, consist of
functions and terminals that are suitable for a
specific problem. GP builds new trees by repeatedly
selecting from a function set (the collection of items,
which may appear as nodes in a tree) and stringing
them together. The termination criterion may include
a maximum number of generations to be run as well
as a problem-specific success predicate. Next, each
individual of the population is classified by a fitness
function that is defined by the programmer and
obtains the aptitude of the individual during the
course of its adaptation. As such, a new population
is created by applying the genetic operators of
reproduction, crossover and mutation to individuals
that are selected according to their performance, and
the previous generation is replaced.
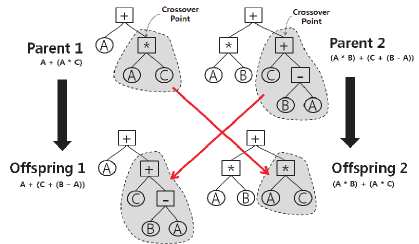
The most commonly used form of crossover is
subtree crossover. Given two parents, subtree
crossover randomly (and independently) selects a
crossover point (a node) in each parent tree. Then, it
creates the offspring by replacing the subtree rooted
at the crossover point in a copy of the first parent
with a copy of the subtree rooted at the crossover
point in the second parent, as illustrated in Figure 2.
The most commonly used form of mutation in GP
(which we will call subtree mutation) randomly
selects a mutation point in a tree and substitutes the
subtree rooted there with a randomly generated
subtree. This is illustrated in Figure 3.
An example of GP MOS regression by the GP
tree is shown in Figure 4. Compared to the equation
(1) of the linear regression, a GP based MOS can
Figure 2: Crossover operation of GP.
Evolutionary Nonlinear Model Output Statistics for Wind Speed Prediction using Genetic Programming
289
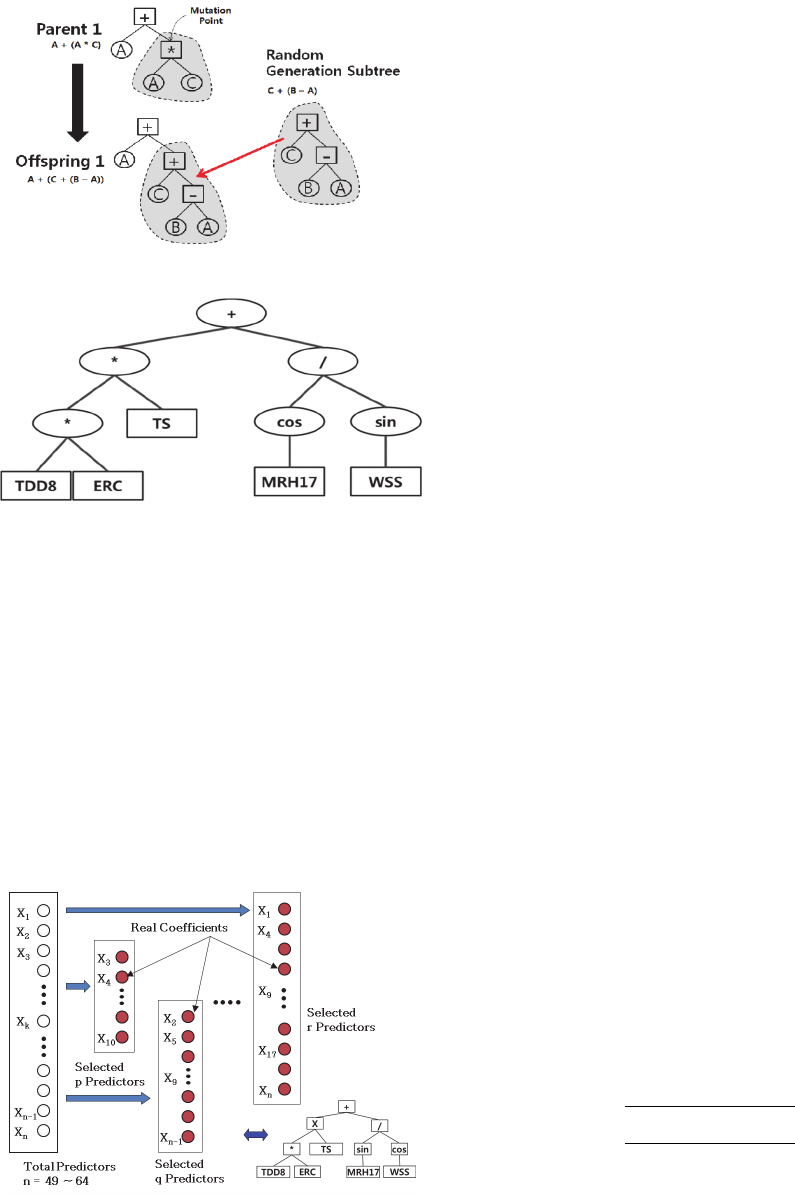
Figure 3: Mutation operation of GP.
Figure 4: Example of an individual by GP tree.
express nonlinearity much more flexible by
involving multiplication, division, sinusoidal
functions, and user defined functions. Therefore, it is
possible to generate open-ended high-order
equations and complex nonlinear forms using a tree
structure. It allows to solve the limitations of a linear
regression approach also.
Especially, the fundamental problem of pre-
selection for potential predictors can be naturally
solved in the GP based approach, since dominant
predictors are extracted automatically through the
evolution process of genetic programming. That
means all candidates of predictors are considered
without excluding some potential predictors in
Figure 5: Natural Selection of Predictors in GP
Evolutionary Process.
advance. Therefore the possibility of optimized
selection of potential predictors is much higher than
in the case of predetermined predictors.
Every solution of the GP based MOS does not
necessarily have the same predictors, because not
only the size and shape of the GP tree for optimized
solutions are different but also selected predictors
are varied for each solution. Therefore, we can
generate a tailor-made compensation equation for
various locations in a wide range of periods which
have different characteristics. The natural selection
by evolutionary process is illustrated in Figure 5.
4 EXPERIMENTS AND RESULTS
4.1 Experimental Setup
The GP programs were run on a Intel Core I7 3770
3.4GHz with 8GB RAM using lil-gp (Zongker
1995). The GP parameters used for the GP_ MOS
generation were as follows:
Population sizes: 200
Max generation: 200
Initial Tree Depth: 2-3
Initial Tree Method: Half and Half
Max Depth: 10
Crossover Rate: 0.9
Mutation Rate: 0.1
The function set for the proposed GP-based
MOS involves following 6 arithmetic operators, and
the terminal set includes 64 potential predictors as
shown in Table 1.
Function = {+, *, -, /, avg, wf1, wf2, cosine, sine}
Terminal = {64 predictor variables}.
The set of primitive functions should be
sufficient to allow for a solution of the problem at
hand, but there are typically many possible choices
of operators-sets that meet this condition. Through
preliminary experiments, the function set above is
selected. Here, avg denotes the arithmetic mean of
two variables, wf1 and wf2 are the weighted sum of
two predictor variables, wf1 uses 0.3 for the first
variable and 0.7 for the first variable, wf2 uses 0.4
and 0.6.
fitness
∑
_
(2)
_
_
∆_
The fitness function of the GP based wind speed
prediction is defined to minimize the RMSE (Root
ECTA 2015 - 7th International Conference on Evolutionary Computation Theory and Applications
290
Mean Square Error) for temperature prediction
between KLAPS reference data and forecast data
obtained by the GP based compensation technique.
It is described in equation (2), where WSS_UM
i is
the wind speed obtained by UM.
4.2 Experimental Results
Performance indices of RMSE(Root Mean Square
Error), ME(Mean Error), and MAE(Mean Absolute
Error) are calculated for comparisons between the
linear regression method and the proposed GP
method. The total average results of all 600 locations
for the test period show that the nonlinear GP
method is superior to the linear regression method in
most of the indices as we expected. The average
RMSE of GP is 1.615 and Linear Regression is
2.556, showing an improvement of 36.8%, both are
better than of UM remarkably. Although the average
BIAS of GP is 0.387 which is a little larger than
0.279 of Linear Regression, the MAE of GP 1.201
is far better than of the respective value of the linear
regression method. The summary of comparison
results is shown in Table 2.
Table 2: Summary of Comparisons for RMSE among UM,
Linear, Regression and GP.
RMSE
(SD)
min ~
max
BIAS
(SD)
min ~
max
MAE
(SD)
min ~
max
UM
4.215
(1.558)
1.085~
7.433
-2.565
(2.239)
-6.487~
5.965
3.420
(1.352)
0.791~
6.493
UM +
Linear Reg.
2.556
(0.709)
0.883~
7.3
0.279
(0.805)
-4.069~
6.372
1.938
(0.577)
0.536~
6.392
UM + GP
1.615
(0.599)
0.439~
4.816
0.387
(0.544)
-4.026~
3
1.201
(0.466)
0.273~
4.06
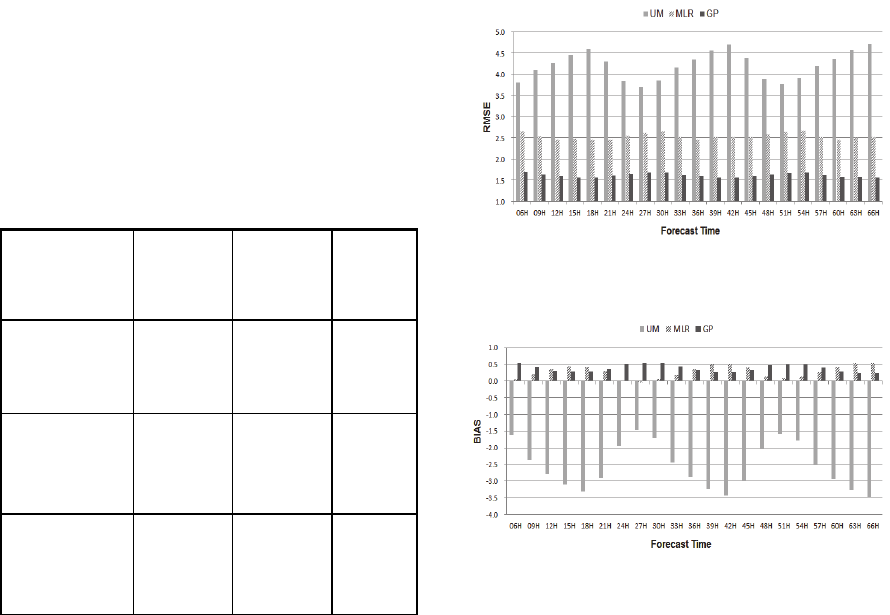
The comparison results of average RMSE in the test
experiment for 12 UTC among UM, MLR and
GP_MOS forecast every 3 hours are shown in
Figure 6. The numeric results represent
performances among UM, Linear Regression and
GP-MOS comparing with KLAPS reference data for
21 intervals from +06h to +66h. It is shown that that
the average RMSEs of GP for 3-days (06h~66h)
forecast intervals are also is better than of UM and
MLR. The ranges of maximum and minimum
deviations for RMSE of GP are far less than of UM
and MLR in all the time intervals.
Interestingly, the wave pattern of results by time
occurs periodically. RMSE values of UM in the
night and morning time (+18h, +39h~45h,
+63h~66h) are higher than others. It was found that
RMSE values of GP and MLR are less susceptible to
the forecast time period and show slightly opposite
wave patterns compared to that of UM.
Figure 7 shows the comparisons of average
BIAS among UM, MLR and GP for 3-days forecast
intervals. The BIAS of UM is in the negative
direction, BIAS of MLR and GP are in the positive
direction. The BIAS values of GP are a little larger
than of MLR, though different in each interval, but
are distributed quite lower than that of UM.
Figure 6: RMSE of Wind Speed prediction for UM, MLR
and GP in entire AWS locations at 12 UTC.
Figure 7: BIAS of Wind Speed prediction for UM, MLR
and GP in entire AWS locations at 12 UTC.
5 CONCLUSIONS
In order to improve wind speed prediction, a new
nonlinear MOS technique, based on symbolic
regression using Genetic Programming, has been
proposed and compared to a linear regression
method. Enormous experiments were executed for
600 AWS locations in South Korea with 21 intervals.
Evolutionary Nonlinear Model Output Statistics for Wind Speed Prediction using Genetic Programming
291
Learning was performed in the period of 2007-2009,
2011 year is used, the data of 2012 year is for
verification, and 2013 year is adopted for test. The
GP method showed superior results than the results
of linear regression method in average RMSE and
MAE.
It becomes clear that the proposed GP based
method is quite competitive with the results of linear
based MOS used in KMA. Further study will aim at
the refinement of the predictor and operator
selection and improvement Evolutionary search
process. This provides some support for the
conjecture that nonlinear and open-ended MOS will
be a promising approach for weather prediction.
REFERENCES
Glahn, H. R. and Lowry, D. A.: The use of model output
statistics (MOS) in objective weather forecasting, J.
Appl. Meteor., 11, 1203–1211, 1972.
Korea Meteorological Administration, http://
www.kma.go.kr.
Koza, J. R.: Genetic Programming: On the Programming
of Computers by Natural Selection, MIT Press,
Cambridge, 1992.
Kim, Y.-S., Park, O.-R., and Hwang, S.-O.: Real time
Operation of the Korea Local Analysis and Prediction
System at METRI, Asia-Pacific J. Atmos. Sci., 38, 1-
10, 2002.
Liu H., Tian H., Chen C., Li Y.: A hybrid statistical
method to predict wind speed and wind power,
Renew. Energ., 35, 1857-1861, 2009.
Palutikof, J. P., Holt, T., Osborn, T.J.: Seasonal
forecasting of strong winds over Europe, Symposium
on global change and climate variations, vol. 13, 125-
128, 2002.
Sweeney C. P., Lynch P., Nolan P.: Reducing errors of
wind speed forecast by an optimal combination of
post-processing methods, Met. Apps, 20, 32-40. 2011.
Termonia, P. and Deckmyn, A.: Model-inspired predictors
for model output statistics, Mon. Weather. Rev., 135,
3496–3505, 2007.
United Kingdom Met Office’s website : http://www.
metoffice.gov.uk.
Vannitsem, S.: Dynamical Properties of MOS Forecasts:
Analysis of the ECMWF Operational Forecasting
System, Weather Forecasting, 23, 1032-1043, 2008.
Yu, X., Park, S.-K., Lee, Y.-H., Ahn, K.-D., and Choo, S.-
H.: The gridding of MOS for high resolution
forecasting, The fifth Korea-Japan-China Joint
Conference on Meteorology, 18-21, 2011.
Zongker, D. and Punch, B.: Lil-GP User’s Manual,
Michigan State University, 1995.
ECTA 2015 - 7th International Conference on Evolutionary Computation Theory and Applications
292
