CBIR Search Engine for User Designed Query (UDQ)
Tatiana Jaworska
Sysytems Research Institute, Polish Academy of Sciences, 6 Newelska Street, 01-447, Warsaw, Poland
Keywords: CBIR, Search Engine, GUI, User Designed Query.
Abstract: At present, most Content-Based Image Retrieval (CBIR) systems use query by example (QBE), but its
drawback is the fact that the user first has to find an image which he wants to use as a query. In some
situations the most difficult task is to find this one proper image which the user keeps in mind to feed it to
the system as a query by example. For our CBIR, we prepared the dedicated GUI to construct a user
designed query (UDQ). We describe the new search engine which matches images using both local and
global image features for a query composed by the user. In our case, the spatial object location is the global
feature. Our matching results take into account the kind and number of objects, their spatial layout and
object feature vectors. Finally, we compare our matching result with those obtained by other search engines.
1 INTRODUCTION
The users of a CBIR system have at their disposal a
diversity of methods depending on their goals, in
particular, search by association, search for a
specific image, or category search (Smeulders et al.,
2000). Search by association has no particular aim
and implies a highly interactive iterative refinement
of the search using sketches or composing images
from segments offered by the system. The search for
a precise copy of the image in mind, or for another
image of the same object, assumes that the target can
be interactively specified as similar to a group of
given examples. The user requirements are reflected
in the query asking methods.
The underlying assumption is that the user has an
ideal query in mind, and the system’s task is to find
this ideal query (Urban et al., 2006). So far, the
methods that have fulfilled these requirements can
be generally divided into:
Interactive techniques based on feedback
information from the user, commonly known as
relevance feedback (RF) (Azimi-Sadjadi et al.,
2009);
Automated techniques based on the global
information derived from the entire collection
known as browser-based;
Automated (might also be interactive in some
cases) techniques based on local information
from the top retrieved results, commonly known
as local feedback or collaborative image retrieval
(CIR) (Zhang et al., 2012) which is used
generally as a powerful tool to narrow down the
semantic gap between low- and high-level
concepts
.
Nowadays, for image and video retrieval the scale
invariant feature transformation (SIFT) and some of
its variants are the most strongly recommended
(Lowe, 1999), (Lowe, 2004), (Mikolajczyk and
Schmid, 2004), (Tuytelaars and Mikolajczyk, 2007)
as their task is: ‘to retrieve all images containing a
specific object in a large scale image dataset, given
a query image of that object’ (Arandjelović and
Zisserman, 2012).
Our approach is different, more user oriented,
and that is why we propose a special, dedicated
user’s GUI which enables the user to compose their
ideal image from the image segments. The data
structure and the layout of the GUI reflect the way
of the search engine works. In this paper we present,
as our main contribution, a new search engine which
takes into account the kind and number of objects,
their features, together with different spatial location
of segmented objects in the image.
In order to help the user create the query which
they have in mind, a special GUI has been prepared
to formulate composed queries. Some of such
queries can be really unconventional as we can see
in (Deng et al., 2012).
An additional contribution is the comparison of
our empirical studies of the proposed search engine
372
Jaworska, T..
CBIR Search Engine for User Designed Query (UDQ).
In Proceedings of the 7th International Joint Conference on Knowledge Discovery, Knowledge Engineering and Knowledge Management (IC3K 2015) - Volume 1: KDIR, pages 372-379
ISBN: 978-989-758-158-8
Copyright
c
2015 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

with the results of other academic engines.
The system concept is universal. In the
construction stage we focus on estate images but for
other compound images (containing more than
several objects) other sets of classes are needed.
Figure 1: The block diagram of our content-based image
retrieval system.
1.1 CBIR Concept Overview
In general, the presented system consists of five
main blocks (see Figure 1) applied in Matlab except
the database:
the image pre-processing block, responsible for
image segmentation and extraction of image
object features, cf. (Jaworska, 2007);
the classification module comprises similarity to
pattern, decision tree, Naïve Bayes and fuzzy
rule-based classifiers (Jaworska, 2014), used
further by the search engine and the GUI.
Classification helps in the transition from rough
graphical objects to human semantic elements.
the Oracle Database, storing information about
whole images, their segments (here referred to as
graphical objects), segment attributes, object
location, pattern types and object identification,
cf. (Jaworska, 2008). We decided to prepare our
own DB for two reasons: (i) when the research
began (in 2005) there were few DBs containing
buildings which were then at the centre of our
attention and (ii) some existing benchmarking
databases offered separate objects (like the Corel
DB) which were insufficient for our complex
search engine concept. At present, our DB
contains more than 10 000 classified objects of
mainly architectural elements, but not only;
the search engine (Jaworska, 2014) responsible
for the searching procedure and retrieval process,
based on a number of objects, the feature vectors
and spatial relationship of these objects in an
image. A query is prepared by the user with the
GUI;
the user-friendly semantic graphical user's
interface (GUI) which allows users to compose
the image they have in mind from separate
graphical objects, as a query (in detail in sec. 3).
2 SEARCH ENGINE CONCEPT
2.1 Graphical Data Representation
A classical approach to CBIR consists in image
feature extraction (Zhang et al., 2004). Similarly, in
our system, at the beginning the new image, e.g.
downloaded from the Internet, is segmented,
creating a collection of objects. Each object, selected
according to the algorithm presented in detail in
(Jaworska, 2011), is described by some low-level
features, such as: average colour k
av
, texture
parameters T
p
, area A, convex area A
c
, filled area A
f
,
centroid {x
c
, y
c
}, eccentricity e, orientation α,
moments of inertia m
11
, m
12
, m
21
, m
22
, major axis
length m
long
, minor axis length m
short
, solidity s and
Euler number E and Zernike moments Z
00
,…,Z
33
.
All features, as well as extracted images of
graphical objects, are stored in the DB. Let Fo be a
set of features F
O
= {k
av
, T
p
, A, A
c
,…, E}. We
collected 45 features for each graphical object. For
an object, we construct a feature vector F containing
the above-mentioned features.
2.2 Object Classification
Thus, the feature vector F is used for object
CBIR Search Engine for User Designed Query (UDQ)
373
classification. We have to classify objects in order to
use them in a spatial object location algorithm and to
offer the user a classified group of objects. So far,
four classifiers have been implemented in this
system:
a comparison of features of the classified object
with class patterns;
decision trees (Fayyad and Irani, 1992). In order
to avoid high error rates resulting from as many
as 40 classes, we use the hierarchical method. A
more general division is achieved by dividing the
whole data set into five clusters, applying
k-means clustering. The most numerous classes
of each cluster constituting a meta-class are
assigned to five decision trees, which results in 8
classes for each one.
the Naïve Bayes classifier (Rish, 2001);
a fuzzy rule-based classifier (FRBC) (Ishibuchi
and Nojima, June 27-39, 2011), (Jaworska, 2014)
is used in order to identify the most ambiguous
objects. According to Ishibuchi, this classifier
decides which of the three classes a new element
belongs to. These three classes are taken from
the three above-listed classifiers.
2.3 Spatial Object Location
Thanks to taking into account spatial object location,
the gap between low-levelled and high-levelled
features in CBIR has diminished. To describe spatial
layout of objects, different methods have been
introduced, for example: the spatial pyramid
representation in a fixed grid (Sharma and Jurie,
2011), spatial arrangements of regions (Smith and
Chang, 1999), (Candan and Li, 2001). In some
approaches image matching is proposed directly,
based on spatial constraints between image regions
(Wang et al., 2004).
Here, spatial object location in an image is used
as the global feature (Jaworska, 2014). The objects’
mutual spatial relationship is calculated based on the
centroid locations and angles between vectors
connecting them, with an algorithm proposed by
Chang and Wu (Chang and Wu, 1995) and later
modified by Guru and Punitha (Guru and Punitha,
2004) to determine the first principal component
vectors (PCVs). The idea is shown in the side boxes
in Figure 2.
2.4 Search Engine Construction
Now, we will describe how the similarity between
two images is determined and used to answer a
query. Let the query be an image I
q
, such as
I
q
= {o
q1
, o
q2
,…, o
qn
}, where o
ij
are objects. An
image in the database is denoted as I
b
, I
b
= {o
b1
,
o
b2
,…, o
bm
}. Let us assume that there are, in total,
M = 40 classes of the objects recognized in the
database, denoted as labels L
1
, L
2
, …, L
M
. Then, by
the image signature I
i
we mean the following vector:
Signature(I
i
) = [nobc
i1
, nobc
i2
, …, nobc
iM
] (1)
where: nobc
ik
denotes the number of objects of class
L
k
present in the representation of an image I
i
, i.e.
such objects o
ij
.
In order to answer the query I
q
, we compare it
with each image I
b
from the database in the
following way. A query image is obtained from the
GUI, where the user constructs their own image
from selected DB objects. First of all, we determine
a similarity measure sim
sgn
between the signatures of
query I
q
and image I
b
:
i
biqibq
II )nob(nob),(sim
sgn
(2)
computing it as an analogy with the Hamming
distance between two vectors of their signatures
(cf. (1)), such that sim
sgn
≥ 0 and
)nob(nobmax
i
biqi
≤ tr, tr is the limit of the number
of elements of a particular class by which I
q
and I
b
can differ. It means that we prefer images with the
same classes as the query. Similarity (2) is non-
symmetric because if some classes in the query are
missing from the compared image the components
of (2) can be negative.
If the maximum component of (2) is bigger than
a given threshold (a parameter of the search engine),
then image I
b
is rejected, i.e. not considered further
in the process of answering query I
q
. Otherwise, we
proceed to the next step and we find the spatial
similarity sim
PCV
(3) of images I
q
and I
b
, based on
the Euclidean, City block or Mahalanobis distance
between their PCVs as:
3
1
2
PCV
)(1),(sim
i
qibibq
PCVPCVII
(3)
If the similarity (3) is smaller than the threshold (a
parameter of the query), then image
I
b
is rejected.
The order of steps 2 and 3 can be reversed because
they are the global parameters and hence can be
selected by the user.
Next, we proceed to the final step, namely, we
compare the similarity of the objects representing
both images I
q
and I
b
. For each object o
qi
present in
the representation of the query I
q
, we find the most
KDIR 2015 - 7th International Conference on Knowledge Discovery and Information Retrieval
374
similar object o
bj
of the same class, i.e. L
qi
= L
bj
. If
there is no object o
bj
L
qi
, then sim
ob
(o
qi
, o
b
) = 0.
Otherwise, similarity sim
ob
(o
qi
, o
b
) between objects
of the same class is computed as follows:
l
bjlqilbjqi
FFoo
2
ob
)(1),(sim
(4)
where l indexes the set of features used to represent
an object. Thus, we obtain the vector of similarities
between query I
q
and image I
b
.
In order to compare images I
b
with the query I
q
,
we compute the sum of sim
ob
(o
qi
, o
bj
) and then use
the natural order of the numbers. Therefore, the
image I
b
is listed as the first in the answer to the
query I
q
, for which the sum of similarities is the
highest.
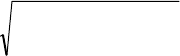
Figure 2 presents the main elements of the search
engine interface with reference images which are
present in the CBIR system. The main (middle)
window displays the query signature and PCV, and
below it the user is able to set threshold values for
the signature, PCV and object similarity. At this
stage of system verification it is useful to have these
thresholds and metrics at hand. In the final Internet
version these parameters will be invisible to the user,
or limited to the best ranges. The lower half of the
window is dedicated to matching results. In the top
left of the figure we can see a user designed query
comprising elements whose numbers are listed in the
signature line. Below the query there is a box with a
query miniature, a graph showing the centroids of
query components and, further below, there is a
graph with PCV components (cf. subsec. 2.3). In the
bottom centre windows there are two elements of the
same class (e.g. a roof) and we calculate their
similarity. On the right side there is a box which is
an example of PCA for an image from the DB. The
user introduces thresholds to calculate each kind of
similarity.
The search engine has been constructed to reduce
the semantic gap in comparison with CBIR systems
based only on low-level features. The introduction
of the image signature and object spatial relations to
the search engine yields much better matching with
regard to human intuition, in spite of the missing
annotations.
3 USER DESIGNED QUERY
CONCEPT
At present, most systems use query by example
(QBE), but its drawback is the fact that the user first
has to find an image which he wants to use as a
query. In some situations the most difficult task is to
find this one proper image which the user keeps in
Figure 2: The main concept of the search engine.
CBIR Search Engine for User Designed Query (UDQ)
375

mind to feed it to the system as a query by example.
An evident example is shown in (Xiao et al., 2011)
where face sketches are needed for face recognition.
Figure 3: The main GUI window. An early stage of a
terraced house query construction.
We propose a graphical editor which enables the
user to compose the image he/she has in mind from
the previously segmented objects (see Figure 3). It is
a bitmap editor which allows for a selection of linear
prompts in the form of contour sketches generated
from images existing in the DB. The contours are
computed as edges based on the Canny algorithm
and as a vector model set to the DB during the pre-
processing stage. Next, from the list of object classes
the user can select elements to prepare a rough
sketch of an imaginary landscape. There are many
editing tools available, for instance:
creating masks to cut off the redundant
fragments of a bitmap (see Figure 4 a));
changing a bitmap colour (Figure 4 c) and d));
basic geometrical transformation, such as:
translation, scale, rotation and shear;
duplication of repeating fragments;
reordering bitmaps forwards or backwards.
This GUI is a prototype, so it is not as well-
developed as commercial programs, e.g. CorelDraw,
nevertheless, the user can design an image consist-
ing of as many elements as they need. The only
constraint at the moment is the number of classes
introduced to the DB, which now stands at 40 but is
set to increase. Once the image has been drafted, the
UDQ is sent to the search engine and is matched
according to the rules described in sec. 2.
However, in case of the absence of UDQ, the
search engine can work with a query consisting of a
full image downloaded, for example, from the
Internet.
Figure 4: Main components of the GUI. We can draw a
contour of the bitmap (see a) and b)) and change the
colour of an element (see c) and d)).
4 RESULTS
In this section, we conduct experiments on the
colour images generated with the aid of the UDQ,
full images taken from our DB and we will compare
our results with another academic CBIR system and
the Google image search engine.
In all tables images are ranked according to
decreasing similarity determined by our system. All
images are in the JPG format but in different sizes.
Although there are different sizes of matched
images, all of them are resized to the query
resolution.
Only in order to roughly compare our system’s
answer to the query, we used the universal image
similarity index (SSIM) proposed by Wang and
Bovik (Wang et al., 2004), being aware that it is not
fully adequate to present our search engine ranking.
SSIM is based on the computation of three
components, namely the luminance, contrast and
structural component, which are relatively
independent. In case of a big difference of images
the components can be negative which may result in
a negative index.
4.1 User Designed Query
A query is generated by the UDQ interface and its
size depends on the user’s decision, as well as the
number of elements (patches). The search engine
displays a maximum of 11 best matched images
from our DB. Although the user designed few
details, the search results are quite acceptable (see
Table 1).
KDIR 2015 - 7th International Conference on Knowledge Discovery and Information Retrieval
376

Table 1: The matching results for queries (in the first row)
and the universal image similarity index for these matches
when PCV similarity is calculated based on: (column 1)
the Euclidean distance, (column 2) the City block distance
(for thresholds: signature = 17, PCV = 3.5, object = 0.9),
(column 3) the City block distance (for thresholds:
signature = 20, PCV = 4, object = 0.9).
0.1571
0,1492
0.1745
0.1099
0,1571 0.1399
0.0237
0,1099
0.0571
0.1525
0,1525
0.1443
0.1089
0,1346
0.1505
0.0541
0,0542
0.0012
0.0062
0,0062
-0.0378
0.0196
0,0419
0.0642
Table 1: The matching results for queries (in the first row)
and the universal image similarity index for these matches
when PCV similarity is calculated based on: (column 1)
the Euclidean distance, (column 2) the City block distance
(for thresholds: signature = 17, PCV = 3.5, object = 0.9),
(column 3) the City block distance (for thresholds:
signature = 20, PCV = 4, object = 0.9). (cont.)
0.1149
0,1497
0.2009
0,1496
0,1154
0.0833
4.2 Full Image
Applying the UDQ is not obligatory. The user can
choose their QBE from among the images of the DB
if they find an image suitable for their aim. Then the
matching results are presented in Table 2.
Table 2: The matching results for QBE when PCV
similarity is calculated based on the Euclidean distance.
Images are ranked according to our search engine; below
each there is the SSIM.
query
0.2519
0.2175
-0.0255
0.1276
0.3129
0.2908
0.1002
0.2888 0.2366
0.0151
0.0738
CBIR Search Engine for User Designed Query (UDQ)
377
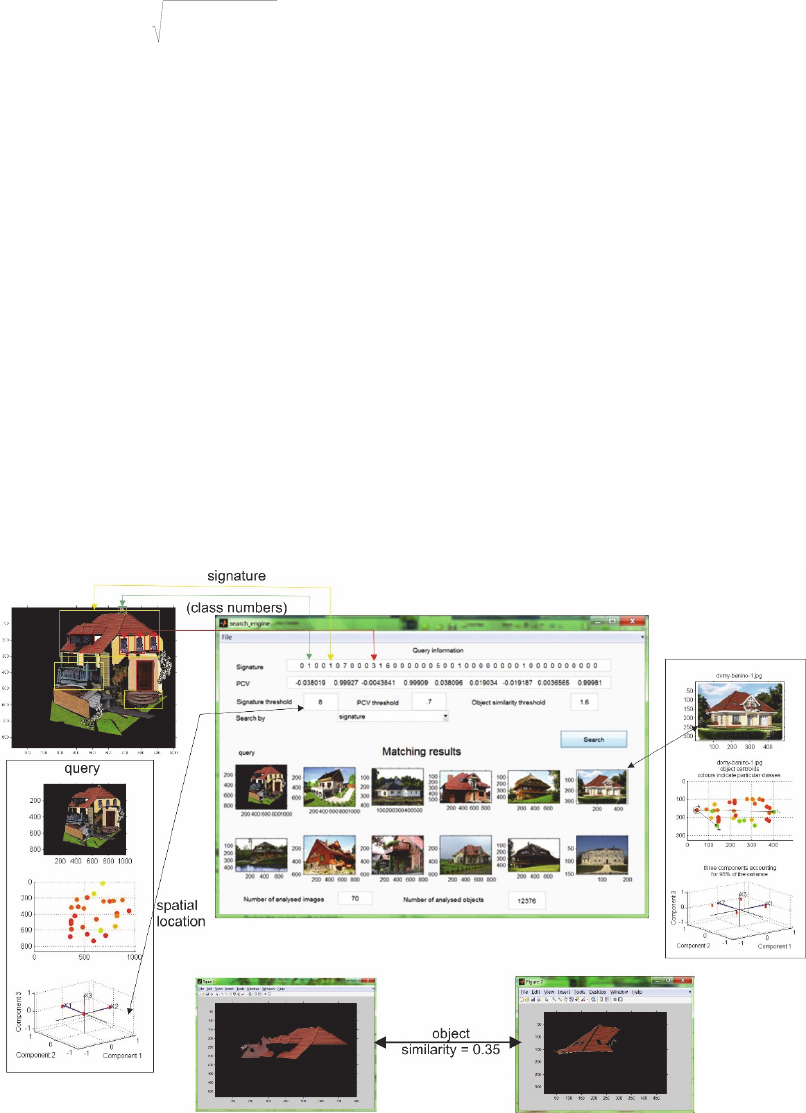
4.3 Comparison to Another Academic
CBIR System
We decided to compare our results with the Curvelet
Lab system which is based on the Fast Discrete
Curvelet Transform (FDCT), developed at Caltech
and Stanford University (Candes et al., 2006) as a
specific transform based on the FFT. The FDCT is,
among others, dedicated to post-processing
applications, such as extracting patterns from large
digital images and detecting features embedded in
very noisy images.
Figure 5: An example of the Curvelet Lab system retrieval
for our query. (Efficiency according to Curvelet Lab
system).
The Curvelet Lab system additionally offers
image retrieval, based on such transforms as: DCT
(Discrete Cosine Transform), LBP (Local Binary
Pattern), colour and combine.
FigureFigure 5
presents the results obtained for a joint set of
images, namely ours and Curvelet Lab system’s.
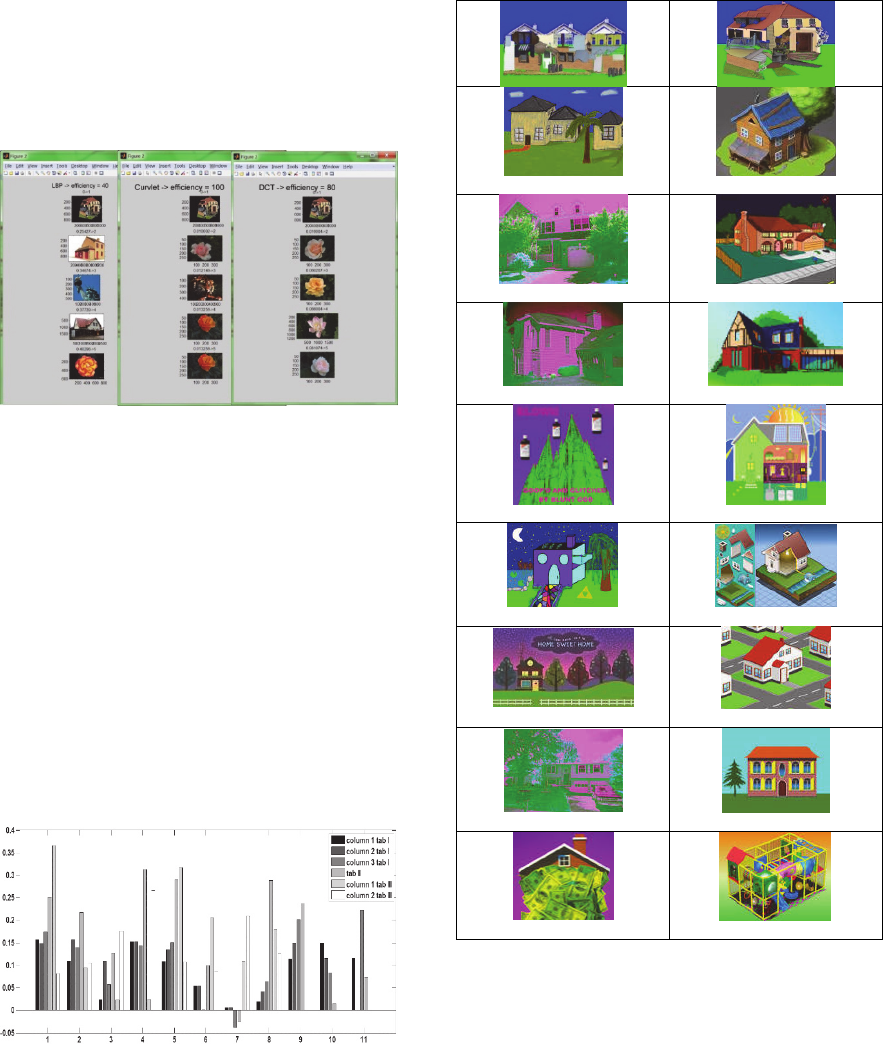
4.4 Comparison with the Google Image
Search Engine
We also decided to compare our results with the
Google image search engine. The results are
presented in Table 3.
Figure 6: The comparison of SSIMs for the above-
presented results from all tables.
In order to better visualise the obtained results,
we compare only the SSIMs from tab. 1, 2 and tab. 3
in the form of a bar chart (see Figure 6).
Table 3: Matches for the Google image search engine and
their SSIM. (Queries in the first row.)
0.3658
0.0821
0.0939
0.1054
0.0232
0.1765
0.0240
0.2666
0.3174
0.1076
0.2056
0.0876
0.1095
0.2089
0.1807
0.1267
5 CONCLUSIONS
We built and described a new image retrieval
method based on a three-level search engine. The
underlying idea is to mine and interpret the
KDIR 2015 - 7th International Conference on Knowledge Discovery and Information Retrieval
378
information from the user’s interaction in order to
understand the user’s needs by offering them the
GUI. A user-centred, work-task oriented evaluation
process demonstrated the value of our technique by
comparing it to a traditional CBIR.
As for the prospects for future work, to evaluate
a method more qualitative than the SSIM should be
prepared. Next, the implementation of an on-line
version should test the feasibility and effectiveness
of our approach. Only experiments on large scale
data can verify our strategy. Additionally, a new
image similarity index should be prepared to
evaluate semantic matches.
REFERENCES
Arandjelović, R. & Zisserman, A., 2012. Three things
everyone should know to improve object retrieval.
Providence, RI, USA, s.n., pp. 2911-2918.
Azimi-Sadjadi, M. R., Salazar, J. & Srinivasan, S., 2009.
An Adaptable Image Retrieval System With
Relevance Feedback Using Kernel Machines and
Selective Sampling. IEEE Transactions on Image
Processing, 18(7), pp. 1645-1659.
Candan, S. K. & Li, W.-S., 2001. On Similarity Measures
for Multimedia Database Applications. Knowledge
and Information Systems, Volume 3, pp. 30-51.
Candes, E., Demanet, L., Donoho, D. & Ying, L., 2006.
Fast Discrete Curvelet Transforms, pp. l-44.: raport.
Chang, C.-C. & Wu, T.-C., 1995. An exact match retrieval
scheme based upon principal component analysis.
Pattern Recognition Letters, Volume 16, pp. 465-470.
Deng, J., Krause, J., Berg, A. & Fei-Fei, L., 2012.
Hedging Your Bets: Optimizing Accuracy-Specificity
Trade-offs in Large Scale Visual Recognition.
Providence, RI, USA, s.n., pp. 1-8.
Fayyad, U. M. & Irani, K. B., 1992. The attribute selection
problem in decision tree generation. s.l., s.n., pp. 104-
110.
Guru, D. S. & Punitha, P., 2004. An invariant scheme for
exact match retrieval of symbolic images based upon
principal component analysis. Pattern Recognition
Letters , Volume 25, pp. 73–86.
Ishibuchi, H. & Nojima, Y., June 27-39, 2011. Toward
Quantitative Definition of Explanation Ability of Fuzzy
Rule-Based Classifiers. Taipei, Taiwan, IEEE Society,
pp. 549-556.
Jaworska, T., 2007. Object extraction as a basic process
for content-based image retrieval (CBIR) system.
Opto-Electronics Review, Dec., 15(4), pp. 184-195.
Jaworska, T., 2008. Database as a Crucial Element for
CBIR Systems. Beijing, China, World Publishing
Corporation, pp. 1983-1986.
Jaworska, T., 2011. A Search-Engine Concept Based on
Multi-Feature Vectors and Spatial Relationship. In: H.
Christiansen, et al. eds. Flexible Query Answering
Systems. Ghent: Springer, pp. 137-148.
Jaworska, T., 2014. Application of Fuzzy Rule-Based
Classifier to CBIR in comparison with other
classifiers. Xiamen, China, IEEE, pp. 1-6.
Jaworska, T., 2014. Spatial representation of object
location for image matching in CBIR. In: A. Zgrzywa,
K. Choros & A. Sieminski, eds. New Research in
Multimedia and Internet Systems. Wroclaw: Springer,
pp. 25-34.
Lowe, D. G., 1999. Object Recognition from local scale-
invariant features. Corfu, Greece, s.n., pp. 1150-1157.
Lowe, D. G., 2004. Distinctive Image Features from
Scale-Invariant Keypoints. International Journal of
Computer Vision, 60(2), pp. 91-110.
Mikolajczyk, K. & Schmid, C., 2004. Scale & Affine
Invariant Interest Point Detectors. International
Journal of Computer Vision, pp. 63-86.
Rish, I., 2001. An empirical study of the naive Bayes
classifier. s.l., s.n., pp. 41-46.
Sharma, G. & Jurie, F., 2011. Learning discriminative
spatial representation for image classification.
Dundee, s.n., pp. 1-11.
Smeulders, A. W. M. et al., 2000. Content-Based Image
Retrieval at the End of the Early Years. IEEE
Transactions on Pattern Analysis and Machine
Intelligence, Dec, 22(12), pp. 1349-1380.
Smith, J. R. & Chang, S.-F., 1999. Integrated spatial and
feature image query. Multimedia Systems, Issue 7,
pp. 129–140.
Tuytelaars, T. & Mikolajczyk, K., 2007. Local Invariant
Feature Detectors: A Survey. Computer Graphics and
Vision, 3(3), pp. 177–280.
Urban, J., Jose, J. M. & van Rijsbergen, C. J., 2006. An
adaptive technique for content-based image retrieval.
Multimedial Tools Applied, July, Issue 31, pp. 1-28.
Wang , Z., Bovik, A. C., Sheikh, H. R. & Simoncelli, E.
P., 2004. Image Qualifty Assessment: From Error
Visibility to Structural Similarity. IEEE Transactions
on Image Processing, April, 13(4), pp. 600–612.
Wang, T., Rui, Y. & Sun, J.-G., 2004. Constraint Based
Region Matching for Image Retrieval. International
Journal of Computer Vision, 56(1/2), pp. 37-45.
Xiao , B., Gao, X., Tao, D. & Li, X., 2011. Recognition of
Sketches in Photos. In: W. Lin, et al. eds. Multimedia
Analysis, Processing and Communications. Berlin:
Springer-Verlag, pp. 239-262.
Zhang, L., Wang, L. & Lin, W., 2012. Conjunctive
patches subspace learning with side information for
collaborative image retrieval. IEEE Transactions on
Image Processing, 21(8), pp. 3707-3720.
Zhang, Y.-J., Gao, Y. & Luo, Y., 2004. Object-Based
Techniques for Image Retrieval. In: S. Deb, ed.
Multimedia Systems and Content-Based Image
Retrieval. Hershey, London: IDEA Group Publishing,
pp. 156-181.
CBIR Search Engine for User Designed Query (UDQ)
379
