
New Robotic Platform for a Safer and More Optimal
Treatment of the Supracondylar Humerus Fracture
Mohamed Oussama Ben Salem
1,3
, Zied Jlalia
2
, Olfa Mosbahi
3
,
Mohamed Khalgui
3
and Mahmoud Smida
2
1
Tunisia Polytechnic School, University of Carthage, 2078, Tunis, Tunisia
2
Orthopedic Institute of Mohamed Kassab, University Tunis El Manar, 2009, Tunis, Tunisia
3
LISI Laboratory, INSAT, University of Carthage, 1080, Tunis, Tunisia
bensalem.oussama@hotmail.com, {zied j, mahmoud.smida}@yahoo.fr,
{olfamosbahi, khalgui.mohamed}@gmail.com
Abstract. Treating the supracondylar humerus fracture, a very common elbow’s
injury, can be very challenging for pediatric orthopedic surgeons. Actually, using
the pinning technique to treat it leads sometimes to many neurological and vas-
cular complications. Furthermore, the medical staff faces a serious danger when
performing such surgeries because of the recurrent exposure to harmful radiations
emitted by the fluoroscopic C-arm. Considering these issues, a national project
was launched to create a new robotic platform, baptized BROS, to automate the
supracondylar humerus fracture’s treatment and remedy the said issues.
1 Introduction
When treating bone injuries, orthopedic surgeons often need precision, both in bone
removal and in the placement of prosthetics, artificial devices that replace a missing
body part [1]. This is due to the fact that, contrarily to soft tissues, bone is actually rigid
and does not alter its shape once fully grown. Preoperative scans such as X-ray or CT
(Computed Tomography) are common and procedures are planned in advance. These
properties have made orthopedic surgery a privileged candidate for the implementation
of medical robots. Also, as most procedures are not life threatening, there has been less
skepticism over the implementation of these systems. Although most surgeons are sat-
isfied with the outcome of conventional techniques [2], pressure to improve efficiency,
implement less invasive procedures by reducing exposure of bony structures has en-
abled research into the area of Computer-Assisted Orthopedic Surgery (CAOS).
The supracondylar fracture of the humerus (or SCH) is one of the most common
injuries faced by pediatric orthopedic surgery. It accounts for 18% of all pediatric frac-
tures and 75% of all elbow fractures [7]. Occurring mainly during the first decade of
life, it is more common among boys [8]. Completely displaced fracture can be one of
the most difficult fractures to treat. The optimal aim of treatment is to obtain and main-
tain alignment of the fracture to allow full functional recovery of the elbow without
residual deformity. This could be achieved through a reduction and stabilization of the
fracture, which could be obtained using several approaches. But because of their best
results and outcomes, closed reduction and lateral percutaneous pinning has become the
Khalgui M., mosbahi O., Ben Salem M., Smida M. and Jlalia Z.
New Robotic Platform for a Safer and More Optimal Treatment of the Supracondylar Humerus Fracture.
DOI: 10.5220/0006162200250032
In European Project Space on Intelligent Systems, Pattern Recognition and Biomedical Systems (EPS Lisbon 2015), pages 25-32
ISBN: 978-989-758-095-6
Copyright
c
2015 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
25

standard of care for most displaced supracondylar fracture [9]. This surgical technique
requires an image intensifier and successive radioscopic images to control fracture re-
duction, and pin fixation. This technique fails in up to 25% of patients and some of them
need re-operation because of inadequate reduction or wrong positioning of wires [10].
Inadequate reduction and/or insufficient stabilization can produce cubitus varus defor-
mity, the most common complication. However, this ”blind” surgical technique may
also lead to neurovascular complications by pinning and damaging brachial artery or
nerves [12,13]. Another major inconvenient of the percutaneous pinning is the recurrent
medical staff exposure to radiations when using the fluoroscopic C-arm [14]. These X-
ray radiations are harmful, and fluoroscopic examinations usually involve higher radia-
tion doses than simple radiographs. In fact, radiation exposures for spine surgeons may
approach or exceed guidelines for cumulative exposure [15]. Another research showed
that the fluoroscopically assisted placement of pedicle screws in adolescent idiopathic
scoliosis, may expose surgeons to radiation levels that exceed established life-time dose
equivalent limits [16]. The study in [11] shows that this exposure is responsible for the
genesis of cancer, especially the thyroid one.
Considering these constraints and issues, a new national project, baptized BROS
(Browser-based Reconfigurable Orthopedic Surgery), has been launched in Tunisia to
remedy these problems. BROS is a multidisciplinary project reuniting the LISI Labora-
tory (INSAT), the Orthopedic Institute of Mohamed Kassab, ARDIA and eHTC. This
work is carried out within a MOBIDOC PhD thesis of the PASRI program, EU-funded
and administered by ANPR (Tunisia). BROS a new reconfigurable robotized platform
dedicated to the treatment of supracondylar humeral fractures. It is capable of running
under several operating modes to meet the surgeon’s requirements and well-defined
constraints. Thus, it can whether automatically perform the whole surgery or bequeath
some tasks to the surgeon.
This chapter is organized as follows: the next section introduces the classification
of supracondylar humeral fracture and its current treatment. The issues faced during
the latter are also highlighted. Section 3 presents the architecture of the national project
BROS and the reconfiguration modes under which it may run. We explain, then, how
BROS will treat a SCH. Finally, we finish this work in Section 4 by a conclusion and
an exposition of our future works.
2 Supracondylar Humerus Fracture
We present, in this section, the classification of supracondylar humeral fracture and how
it is currently treated.
2.1 Classification of Supracondylar Humeral Fracture
Many classifications of the supracondylar humeral fractures were established. They are
based on both the direction and the degree of displacement of the distal fragment [3].
The Lagrange classification system and the Gartland’s are the most widely used. The
first is the most widely used in the French literature. It divides these fractures into
four types on the basis of antero-posterior and lateral radiographs [4]. In the English
26
EPS Lisbon January 2015 2015 - European Project Space on Intelligent Systems, Pattern Recognition and Biomedical Systems
26

literature, the second is the most commonly used: the Gartland’s classification is based
on the lateral radiograph and fractures are classified, as illustrated in Figure 1, according
to a simple three-type system (Table 1) [5]. We adopt this classification in this paper.
Table 1. Gartland’s classification of supracondylar fractures of the humerus.
Type Radiologic characteristics
I Undisplaced fractures
II Displaced fracture with intact posterior hinge
III Completely displaced fractures with no contact between the fragments
Fig. 1. Gartland’s classification of supracondylar fractures of the humerus.
2.2 Supracondylar Humeral Fracture Treatment
In this section, we expose the treatment which was performed on a true case of a pa-
tient presenting a supracondylar humeral fracture who came to the Children Hospital
of B
´
echir Hamza (Tunis). The patient who is a ten-year-old girl fell on her outstretched
right hand on November 12th 2013. After clinical examination and radiological diagno-
sis, the patient’s elbow was immobilized in a plaster splint and the patient was admitted
in the pediatric orthopedics department and operated on the same day. Radiographs
have showed a type III fracture according to Gartland’s classification as show in Figure
2.
We were invited by Dr. Mahmoud SMIDA (Professor Medical Doctor, Head of Pe-
diatric and Adolescent Orthopedics Department), our medical collaborator, to attend the
surgical intervention. Closed reduction of fracture and lateral percutaneous pinning was
performed under general anesthesia and fluoroscopic control. The injured elbow was,
then, placed under the fluoroscopic image intensifier (Figure 3). The fracture was re-
duced by external maneuvers: pulling gentle, longitudinal traction and correcting frontal
displacement, flexing the elbow and pushing anteriorly on the olecranon, hyperflexing
the elbow and confirming maintenance of coronal alignment. Reduction was controlled
by the image intensifier and a total of 9 radioscopic images were taken. The elbow
was immobilized once a satisfying reduction was achieved (Figure 4). As illustrated in
Figure 6, two lateral and parallel smooth pins were then percutaneously inserted from
the lateral condyle through the opposite cortical bone to stabilize the fracture. After the
placement of the two pins, the second pin had to be removed and reinserted since it did
not straightaway follow the right trajectory. In this step, 15 fluoroscopic images were
taken. After placement, the pins were bent over and cut off outside the skin. A long arm
cast was then applied at the elbow in approximately 90 ˚ of flexion.
27
New Robotic Platform for a Safer and More Optimal Treatment of the Supracondylar Humerus Fracture
27
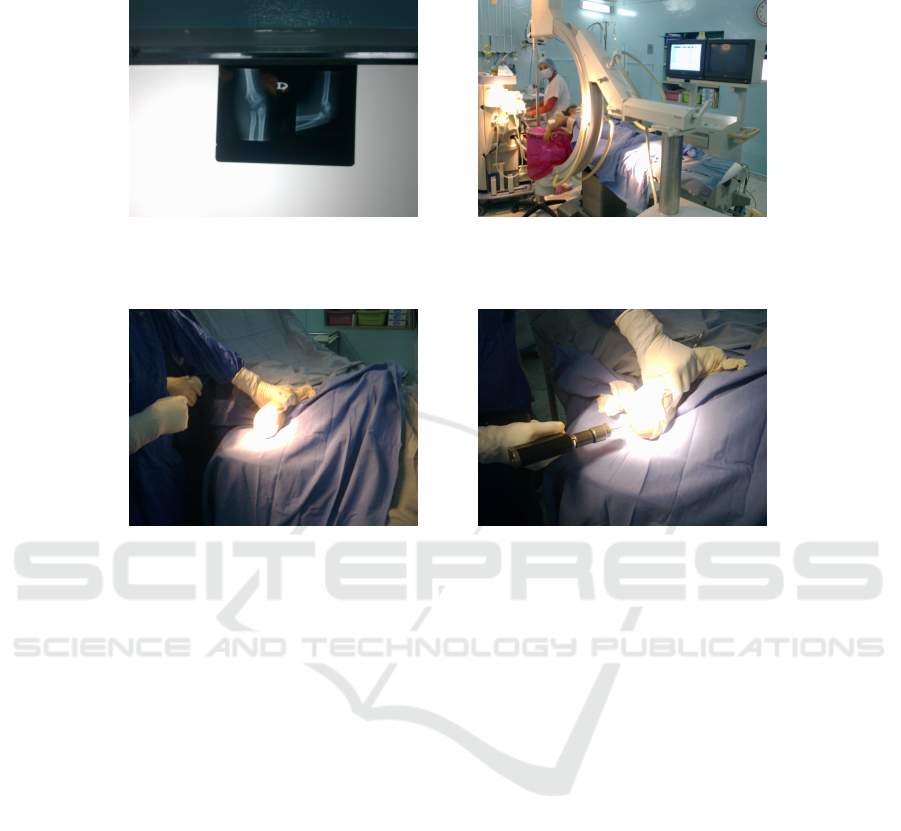
Fig. 2. The fracture’s radiographs. Fig. 3. The injured elbow installed under the flu-
oroscopic image intensifier.
Fig. 4. Elbow immobilization after obtaining
fracture reduction.
Fig. 5. Lateral percutaneous pinning.
During this total surgery, a total of 24 fluoroscopic images were taken, which in-
volves high doses of radiation to the medical staff, especially since such interventions
are performed 2 times per day on average.
3 Industrial National-European Project: BROS
We present in this section BROS’s architecture and reconfiguration modes. We expose,
thereafter, the constraints which have to be followed while implementing this robotized
platform.
3.1 Architecture of BROS
BROS is a robotic platform dedicated to humeral supracondylar fracture treatment. It is
able to reduce fractures, block the arm and fix the elbow bone’s fragments by pinning.
It also offers a navigation function to follow the pins’ progression into the fractured
elbow. BROS is, as shown in the class diagram hereafter, composed of a browser (BW),
a control unit (UC), a middleware (MW), a pinning robotic arm (P-BROS) and 2 block-
ing and reducing arms (B-BROS1 and B-BROS2). The said components are detailed
hereafter.
28
EPS Lisbon January 2015 2015 - European Project Space on Intelligent Systems, Pattern Recognition and Biomedical Systems
28

Fig. 6. BROS’s class diagram.
Browser. The browser, which is a Medtronics’s product and called FluoroNav, is a
combination of specialized surgical hardware and image guidance software designed
for use with a StealthStation Treatment Guidance System. Together, these products en-
able a surgeon to track the position of a surgical instrument in the operating room and
continuously update this position within one or more still-frame fluoroscopic images
acquired from a C-Arm. The advantages of this virtual navigation over conventional
fluoroscopic navigation include: (i) the ability to navigate using multiple fluoroscopic
views simultaneously, (ii) the ability to remove the C-Arm from the operative field dur-
ing navigation, (iii) significant reduction in radiation exposure to the patient and staff.
In addition, the FluoroNav System allows the surgeon to: (i) simulate and measure
instrument progression or regression along a surgical trajectory, (ii) save instrument
trajectories, and display the angle between two saved trajectories or between a saved
trajectory and the current instrument trajectory, (iii) measure the distance between any
two points in the cameras field of view, (iv) measure the angle and distance between a
surgical instrument and a plane passing through the surgical field (such as the patient
midplane). Primary hardware components in the FluoroNav System include the Fluo-
roNav Software, a C-Arm Calibration Target, a reference frame, connection cables, and
specialized surgical instruments.
Control Unit. The CU ensures the smooth running of the surgery and its functional
safety. It asks the supracondylar fracture’s type to the middleware, and then computes,
according to it, the different coordinates necessary to specify the robotic arms’ behav-
iors concerning the fracture’s reduction, blocking the arm and performing pinning. The
surgeon monitors the intervention progress thanks to a dashboard installed on the CU.
Middleware. The middleware is a software installed on the browser and which acts
as a mediator between the CU and the BW. It is an intelligent component that provides
29
New Robotic Platform for a Safer and More Optimal Treatment of the Supracondylar Humerus Fracture
29

several features of real-time monitoring and decision making. The middleware contains
several modules: (i) an image processing module, (ii) a controller, (iii) a communication
module with the CU.
Pinning Robotic Arm. The pinning robotic arm, P-BROS, inserts two parallel Kirschner
wires according to Judet technique [6] to fix the fractured elbow’s fragments. To insure
an optimal postoperative stability, BROS respects the formula:
S = B/D > 0.22 (1)
where S is the stability threshold, B the distance separating the two wires and D the
humeral palette’s width [17].
Blocking and Reducing Robotic Arms. B-BROS1 blocks the arm at the humerus to
prepare it to the fracture reduction. B-BROS2 performs then a closed reduction to the
fractured elbow before blocking it once the reduction is properly completed.
3.2 Reconfiguration Modes
Reconfiguration is an important feature of BROS. It is designed to be able to operate in
different modes. The surgeon can actually decide to manually perform a task if BROS
does not succeed to automatically perform it, whether it is facture reduction, blocking
the arm or pinning the elbow. Thus, five different operating modes are designed and de-
tailed hereafter: (i) Automatic Mode (AM): The whole surgery is performed by BROS.
The surgeon oversees the operation running, (ii) Semi-Automatic Mode (SAM): The
surgeon reduces the fracture. BROS performs the remaining tasks, (iii) Degraded Mode
for Pinning (DMP): BROS only realizes the pinning. It is to the surgeon to insure the
rest of the intervention, (iv) Degraded Mode for Blocking (DMB): BROS only blocks
the fractured limb. The remaining tasks are manually done by the surgeon, (v) Basic
Mode (BM): The whole intervention is manually performed. BROS provides naviga-
tion function using the middleware that checks in real time the smooth running of the
operation.
3.3 Constraints Definition
To treat a humeral supracondylar fracture using BROS, the following steps are per-
formed in the automatic mode:
i) the surgeon launches the system and chooses one of the five operating modes;
ii) CU asks MW about the fracture coordinates;
iii) MW requests an image from BW and the latter sends it;
iv) MW determines the different coordinates by image processing and sends them to
CU;
v) based on the received coordinates, CU orders B-BROS1 to block the arm at the
humerus;
30
EPS Lisbon January 2015 2015 - European Project Space on Intelligent Systems, Pattern Recognition and Biomedical Systems
30

vi) B-BROS1 blocks the limb;
vii) CU asks B-BROS2 to reduce the fracture based on the latter’s line;
viii) B-BROS2 reduces the fracture;
ix) CU asks MW to ensure that the reduction was successful;
x) MW requests a new image from BW and checks the fracture reduction result. If it
is satisfactory, BROS moves to step xi. Steps from vii to ix are repeated otherwise;
xi) CU orders B-BROS2 to block the arm;
xii) under the request of UC, P-BROS performs the first and the second pinning;
xiii) once the pinning is successful, CU asks B-BROS1 and B-BROS2 to unblock the
limb.
4 Conclusion
The work presented in this chapter consists in introducing a new robotic platform ded-
icated to the treatment of supracondylar humerus fracture, and its contributions. BROS
is a flexible system since it may run under different operating modes to meet the surgeon
requirements and the environment constraints: it is reconfigurable. Recent works proved
the usefulness of this robotic platform to avoid complications that may be generated be-
cause of the blind pinning and prevent the danger posed by the recurrent exposition to
radiations [18, 19]. We can, now, certify that BROS is an innovating project which will
be of a great help to pediatric orthopedic surgeons. The next step is to proceed to the
real implementation of BROS using the ABB robotic arms.
References
1. Christensen, R. W. (1970). U.S. Patent No. 3,488,779. Washington, DC: U.S. Patent and
Trademark Office.
2. Jaramaz, B., Hafez, M. A., & DiGioia, A. M. (2006). Computer-assisted orthopaedic surgery.
Proceedings of the IEEE, 94(9), 1689-1695.
3. Barton, Kelly L., et al. ”Reliability of a modified Gartland classification of supracondylar
humerus fractures.” Journal of Pediatric Orthopaedics 21.1 (2001): 27-30.
4. Lagrange, J., and P. Rigault. ”Fractures supra-condyliennes.” Rev Chir Orthop 48 (1962):
337-414.
5. Pirone, A. M., H. K. Graham, and J. I. Krajbich. ”Management of displaced extension-type
supracondylar fractures of the humerus in children.” J Bone Joint Surg Am 70.5 (1988): 641-
50.
6. Judet, J. E. A. N. ”Traitement des fractures sus-condyliennes transversales de l’humrus chez
l’enfant.” Rev Chir Orthop 39 (1953): 199-212.
7. Landin, Lennart A., and Lars G. Danielsson. ”Elbow fractures in children: an epidemiological
analysis of 589 cases.” Acta Orthopaedica 57.4 (1986): 309-312.
8. Landin, Lennart A. ”Fracture Patterns in Children: Analysis of 8,682 Fractures with Special
Reference to Incidence, Etiology and Secular Changes in a Swedish Urban Population 1950-
1979.” Acta Orthopaedica 54.S202 (1983): 3-109.
9. Zhao, Jia-Guo, Jia Wang, and Peng Zhang. ”Is lateral pin fixation for displaced supracondylar
fractures of the humerus better than crossed pins in children?.” Clinical Orthopaedics and
Related Research 471.9 (2013): 2942-2953.
31
New Robotic Platform for a Safer and More Optimal Treatment of the Supracondylar Humerus Fracture
31

10.Aronson, D. C., E. Van Vollenhoven, and J. D. Meeuwis. ”K-wire fixation of supracondylar
humeral fractures in children: results of open reduction via a ventral approach in comparison
with closed treatment.” Injury 24.3 (1993): 179-181.
11.Schonfeld, S. J., C. Lee, and A. Berrington de Gonzlez. ”Medical exposure to radiation and
thyroid cancer.” Clinical Oncology 23.4 (2011): 244-250.
12.Gosens, Taco, and Karst J. Bongers. ”Neurovascular complications and functional outcome in
displaced supracondylar fractures of the humerus in children.” Injury 34.4 (2003): 267-273.
13.Flynn, JOSEPH C., JOSEPH G. Matthews, and ROGER L. Benoit. ”Blind pinning of dis-
placed supracondylar fractures of the humerus in children.” J Bone Joint Surg Am 56.2 (1974):
263-72.
14.Clein, Norman W. ”How safe is X-ray and fluoroscopy for the patient andthe doctor?.” The
Journal of pediatrics 45.3 (1954): 310-315.
15.Rampersaud, Y. Raja, et al. ”Radiation exposure to the spine surgeon during fluoroscopically
assisted pedicle screw insertion.” Spine 25.20 (2000): 2637-2645.
16.Haque, Maahir Ul, et al. ”Radiation exposure during pedicle screw placement in adolescent
idiopathic scoliosis: is fluoroscopy safe?.” Spine 31.21 (2006): 2516-2520.
17.Smida, M., et al. ”Un index de stabilit
´
e pour l’embrochage percutan
´
e lat
´
eral parall
`
ele des
fractures supracondyliennes du coude chez l’enfant.” Revue de Chirurgie Orthop
´
edique et
R
´
eparatrice de l’Appareil Moteur 93.4 (2007): 404.
18.Ben Salem, Mohamed O., et al. ”ZiZo: Modeling, Simulation and Verification of Recon-
figurable Real-Time Control Tasks Sharing Adaptive Resources. Application to the Medical
Project BROS.” Proceedings of the 8th Int. Conference on Health Informatics (2015): 20-31.
19.Ben Salem, Mohamed O., et al. ”BROS: A New Robotic Platform for the Treatment of Supra-
condylar Humerus Fracture.” Proceedings of the 8th Int. Conference on Health Informatics
(2015): 151-163.
32
EPS Lisbon January 2015 2015 - European Project Space on Intelligent Systems, Pattern Recognition and Biomedical Systems
32
