
Intra Vehicular Wireless Channel Measurements
Aniruddha Chandra
1
, Ale
ˇ
s Proke
ˇ
s
1
, Ji
ˇ
r
´
ı Blumenstein
1
, Pavel Kukolev
1
,
Josef Vychodil
1
, Tom
´
a
ˇ
s Mikul
´
a
ˇ
sek
1
, Thomas Zemen
2
and Christoph F. Mecklenbr
¨
auker
3
1
Department of Radio Electronics, Brno University of Technology,
61600, Brno, Czech Republic
2
AIT Austrian Institute of Technology GmbH, 1220, Vienna, Austria
3
Institute of Telecommunications, Vienna University of Technology, 1040, Vienna, Austria
{chandra, prokes, blumenstein, mikulasekt}@feec.vutbr.cz,
{xkukol01, xvycho05}@stud.feec.vutbr.cz, thomas.zemen@ait.ac.at,
christoph.mecklenbraeuker@tuwien.ac.at
Abstract. Intra vehicular communication is an emerging field of research due
to its potential applications in safety of passengers, navigational and localization
aids for driver, and multimedia infotainment. This chapter describes the wire-
less channel sounding activities performed inside a typical passenger car under
the SoMoPro and the GACR projects. Three different channel sounding archi-
tectures are developed for the purpose, namely direct pulse based sounding, fre-
quency domain sounding and pseudo noise sequence based time domain sound-
ing. Experiments with different placements of transmitter and receiver antennas
inside the car were performed for both the ultra-wide-band and millimeter wave
band. Channel transfer functions and impulse responses extracted from all these
measurement campaigns are utilized to construct several deterministic and statis-
tical channel models. The models are useful for designing intra vehicular wireless
links and for devising novel vehicular localization algorithms.
1 Background
In recent years there has been a growing demand for wireless personal area networks
(WPANs) offering high data rates for short-range indoor communication applications.
The manufacturers of vehicles, aircrafts, etc. have a great interest in replacing wired
communication links by wireless one in order to save installation costs.
Intra vehicular wireless links are also pivotal for intra-vehicle sensor networks.
Modern vehicles employ a large number of sensors to provide vital information such as
temperature, wheel rotation speed, distances to nearby objects, etc., for the electronic
control units. As the number of such sensors steadily increases, the physical wires be-
tween the electronic control unit and the sensors pose significant challenges in design
because wires are expensive, wiring harness belong among the heaviest components
in a vehicle and have a large impact on fuel consumption, and wires are also restric-
tive because there are a few locations in the vehicle where sensors cannot be deployed
(steering wheel, tyres, and windshields).
Another aspect for intra vehicular wireless links to be considered is the possibility of
object (device or people) localization. For example, pervasive electronic gadgets require
Zemen T., Mecklenbrauker C., Vychodil J., Chandra A., Mikulasek T., Blumenstein J., Prokes A. and Mikulà ˛aÅ ˛aek T.
Intra Vehicular Wireless Channel Measurements.
DOI: 10.5220/0006164500030027
In European Project Space on Information and Communication Systems (EPS Angers 2015), pages 3-27
ISBN: 978-989-758-155-7
Copyright
c
2015 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
3

position specific instructions (e.g. hands-free profile for driver), the safety equipments
such as smart air bags require knowledge of passenger occupancy, and personalized
infotainment demands parallel location oriented multimedia streaming.
For such a wide range of intra vehicular wireless applications, the prospective can-
didates are, ultra-wide-band (UWB), millimeter wave (mmW), and infrared (IR) or op-
tical band technologies. UWB technologies working in the 3.1 GHz to 10.6 GHz fre-
quency band provides data rates up to a few Gbps for the short-range communication
in WPANs. On the other hand, 60 GHz mmW band (55-65 GHz) offers low latency
and high transmission capacity of up to 2 Gbps. Finally, IR communication has the ad-
vantages of utlizing unregulated and unlicensed electromagnetic spectrum, offers high
quality data transmission, and is immune to electromagnetic interference.
1.1 GACR Project
The GACR project [1] is scheduled for four years (2013-2016) and is funded by the
Czech Science Foundation. The title of the project is, ‘Research into wireless channels
for intra-vehicle communication and positioning’.
The main emphasis of the project is measurement and modeling of the intra-vehicle
channel for WPAN application in the UWB, mmW, and optical bands and for object
localization application in the UWB, and mmW bands. In addition, the existing mmW
and UWB channel models derived for WPAN and sensor networks applications will be
verified and compared with models created for optical bands.
The project includes six work packages as described below:
WP 1: Creation of the workplace for measurement of mmW, UWB, and optical signal
propagation within the vehicle.
WP 2: Measurement of the intra-vehicle signal propagation for WPAN, sensor network
and positioning applications.
WP 3: Analysis and modeling of mmW and UWB signal propagation for WPAN and
sensor network application, verification and improvement of the existing chan-
nel models.
WP 4: Analysis and modeling of mmW and UWB signal propagation within the vehi-
cle for the localization purposes.
WP 5: Analysis and modeling of the IR propagation within the vehicle for WPAN
application.
WP 6: Verification of usability of the mmW, UWB, and optical bands for particular
application and determination of accessible parameters.
1.2 SoMoPro Project
The SoMoPro project [2] is a three year (2014-2016) Marie Curie COFUND activity
jointly funded by European Commission under the seventh framework program (FP7)
and by the region of South Moravia, Czech Republic. The title of the project is, ‘Lo-
calization using ultra wide band wireless systems: from algorithms to hardware imple-
mentation’.
4
EPS Angers 2015 2015 - European Project Space on Information and Communication Systems
4

Localization with current global positioning system (GPS) is restricted to the areas
where there is a clear line-of-sight (LoS) to satellites. Apart from that, the resolution
is very poor (within several meters) for local use. While indoor localization systems
do exist (ultrasound, infrared etc.) they are expensive, hard to install and maintain, and
suffer from similar resolution problems.
UWB nodes are relatively cheaper, transmit low power, and are capable of accu-
rate localization in dense cluttered environments, owing to their inherent high delay
resolution and ability to penetrate obstacles. Rather than competing GPS, UWB may
augment the capabilities of GPS and operate in a compatible manner. UWB can pro-
vide detection, ranging, and motion sensing of personnel and objects through walls with
centimeter precision.
The overall objective of the project is to examine UWB transmission as a possi-
ble candidate for localization purposes. In order to align the research with the GACR
project activities, we have chosen the vehicular environment as our primary target ap-
plication area.
1.3 Organization of the Chapter
After briefly reviewing the project objectives, we present the theoretical background of
the three channel sounding architectures in Section 2. Section 3 deals with the mea-
surement setup and parameters. The measurement setups and important results for ex-
periments in UWB (3-11 GHz), mmW (55-65 GHz) and narrowband (5.8 GHz) are
documented in Section 4, Section 5, and in Section 6, respectively. This chapter con-
cludes with a description of future project activities in Section 7.
2 Channel Sounding Techniques
A basic wireless channel sounding experiment refers to exciting the channel with some
known radio frequency (RF) signal and measuring the response (amplitude and phase)
of the channel. As physical wireless channels can be approximated as linear filters, the
impulse response of the channel completely characterizes the channel [3].
Depending on the frequency range of the sounding signal, radio channel sounding
can be either narrowband or wideband. Further, the radio sounding can also be grouped
under either time domain or frequency domain sounding. The impulse response, h(t),
obtained in Section 2.2 and Section 2.4 characterizes the channel in the time domain,
while Section 2.3 characterizes the channel in the frequency domain by finding the
channel transfer function, H( f ), approximated with the forward transmission coeffi-
cient, s
21
. It is possible to convert one to another through Fourier transform [4]. As the
measurements are all done with digital devices, the Fourier transforms employed are the
fast Fourier transform (FFT) to get the transfer function from the CIR, H( f ) = F {h(t)},
and the inverse fast Fourier transform (IFFT) to obtain the CIR from s parameters,
h(t) = F
−1
{H( f )}.
5
Intra Vehicular Wireless Channel Measurements
5

2.1 Channel Parameters
The field work related to our projects [1, 2] consists of various channel sounding exper-
iments performed inside or around a passenger car parked in an underground garage.
The static condition of the vehicle as well as fixed transmitter (Tx) and receiver (Rx)
antenna positions allows us to neglect Doppler shift and time variations of the channel.
Channel impulse response: The baseband complex channel impulse response (CIR)
under such assumptions may be expressed as follows
h(t) =
N
∑
k=0
α
k
exp( jθ
k
)δ(t −τ
k
) (1)
where the received signal is a composition of N multi-path components (MPCs), and
α
k
, θ
k
and τ
k
denote the path gain, phase shift and delay of the kth path, respectively.
Unless used for localization purposes, the measured delay for the first arriving line of
sight (LoS) path is set to zero, i.e. τ
0
= 0, so that the delays for other non line of sight
(nLoS) paths, i.e. τ
k
;k 6= 0, may be termed as excess delays.
Power delay profile: The power delay profile (PDP) is defined as the expectation of the
average received power as a function of delay time when an impulse is transmitted. It is
closely related with the CIR [5]
PDP(t) = E
|h(t)|
2
(2)
For comparison, the obtained PDPs are often described in the normalized form
PDP
n
(t) = PDP(t)/
Z
τ
max
0
PDP(t) dt (3)
where τ
max
= max
k
(τ
k
) denotes the maximum excess delay.
Mean excess delay: As the name implies, mean excess delay, denotes the weighted
average delay and may be found from the first moment of the PDP
¯
τ =
Z
τ
max
0
t ·PDP
n
(t) dt (4)
RMS delay spread: Root mean square (RMS) delay spread is the second central moment
of the PDP
τ
rms
=
r
Z
τ
max
0
(t −
¯
τ)
2
·PDP
n
(t) dt (5)
2.2 Direct Time Domain Sounding
If the channel is assumed to be linear and time invariant, the received signal, r(t) = s(t)∗
h(t), may be expressed as the convolution of the transmitted signal s(t) and the channel
impulse response h(t). Thus, the most straightforward way to find the channel impulse
response is to send an impulse as the transmitted signal, s(t) = δ(t), which yields a CIR
6
EPS Angers 2015 2015 - European Project Space on Information and Communication Systems
6

at the receiver according to, r(t) = δ(t)∗h(t) = h(t). However, the generation of an ideal
impulse is not possible, and in practice an impulse like waveform with narrow pulse
width is transmitted. It may be mentioned here that this method is primarily suitable for
UWB measurements.
The main advantage of the pulsed sounding technique is, the channel impulse re-
sponse is recorded in real time. In general, a repetitive pulse train is used for such
sounding which necessitates fast acquisition at the receiver side. If a digital sampling
oscilloscope (DSO) is used for this purpose, it should be able to operate at sampling
rates of 20 Gs/s [6]. In our experiments we did not employ periodic pulse sounding as
we did not try to observe the time variance of the channel.
There are several drawbacks associated with this method. First, the method needs
special function generators. In fact, we abandoned this approach after first few set of
experiments due to hardware unavailability. Second, impulsive signals are difficult to
amplify due to RF amplifier nonlinearities [7]. Third, the poor dynamic range limits
application of this method for larger Tx-Rx seprations.
2.3 Frequency Domain Sounding
Frequency domain channel sounding is generally implemented through a vector net-
work analyzer (VNA). The VNA uses a stepped frequency sweep to measure the chan-
nel in the frequency domain and records the forward transmission parameters. For a
simple two port VNA this boils down to the recording of s
21
, when the Tx and Rx are
connected to port 1 and port 2, respectively.
The main benefits of the VNA are its large dynamic range, flexible frequency con-
trol, and smooth hardware synchronizations. Also the same setup may be used for both
narrowband and wideband sounding by changing simple settings of the VNA. The re-
quirement that Tx and Rx antennas should be within cable length and the channel to be
static are also satisfied for in-car sounding experiments.
However, the VNA systems suffer from a slow measurement time [8]. One should
also keep in mind that the CIR obtained with VNA through the IFFT operation is,
h
VNA
(t) = h(t) ∗h
fil
(t), where H
fil
( f ) = F {h
fil
(τ)} is the transfer function of the win-
dowing operation.
2.4 PN Sequence based Time Domain Sounding
Pseudo noise (PN) sequence based time domain sounder use the following principle [4,
9]: if white noise, n(t), is fed as input to the channel, and the received signal, r(t) =
R
h(τ)n(t −τ)dτ, is cross correlated with a delayed version of the input, the correlator
output
E{r(t) ·n
∗
(t −τ)} = E
Z
h(ξ) ·n(t −ξ) ·n
∗
(t −τ)dξ
=
Z
h(ξ) ·R
n
(τ −ξ)dξ = N
0
·h(τ)
(6)
is proportional to the impulse response of the channel. In the above set of equations,
R
n
(τ) is the autocorrelation function of white noise n(t), which is equal to the single-
7
Intra Vehicular Wireless Channel Measurements
7

sided noise power spectral density, N
0
. A PN sequence is a long sequence having noise
like properties.
In our experiment, we have used maximal length sequences or m-sequences as
pseudo random binary sequences (PRBSs) due to their good autocorrelation properties.
At the transmitter, a correlation sounder is thus composed of a PN sequence generator
and at the receiver data may be recorded with a DSO. It is possible to realize a matched
filter in the DSO matched to the specific m-sequence that was generated and obtain the
impulse response in real time. We prefered to do the processing off-line with MATLAB
after collecting the received signal samples from the DSO.
The PN sequence based method overcomes the low dynamic range problem of direct
time domain sounding due to the inherent processing gain achieved by the cross corre-
lation process. Correlation processing also suppresses narrowband interference signals.
The post-processing is, however, a bit complex, and an accurate synchronization be-
tween Tx and Rx is needed [6].
3 Measurements Setup and Parameters
3.1 Measurement Parameters
There are some important measurement parameters, as listed below, which affects mea-
surement accuracy and speed.
Frequency Range and Bandwidth: In VNA based measurements, the entire frequency
range between a start frequency ( f
L
) and a stop frequency ( f
H
) is swept. The number of
discrete frequency tones generated by the VNA (N
VNA
) in the range and the bandwidth,
BW = f
H
− f
L
, determine the frequency resolution
f
s
= ( f
H
− f
L
)/(N
VNA
−1) = BW/(N
VNA
−1) (7)
On the other hand, the frequency response of an impulse like wave spans over from
DC ( f
L
= 0) to a high cut-off frequency ( f
H
). The bandwidth, BW = 2/t
d
, is determined
by the duration of the pulse, t
d
. For the PN sequence based setup, t
d
should be replaced
with T
c
, the chip duration.
Time and Distance Resolution: For VNA, the bandwidth also determines the time reso-
lution or the minimum time between samples in the CIR function obtained after IFFT
t
res
= 1/BW (8)
The distance resolution refers to the length an electromagnetic wave can propagate in
free space (c = 3 ×10
8
m/s) during time t
res
d
res
= c ·t
res
= c/BW (9)
For direct time domain pulse sounding, the duration of the pulse (t
d
) sets the time
resolution, with minimum resolvable delay between MPCs being equal to pulse dura-
tion. If the pulse is narrower it is possible to resolve two close MPCs. Quite naturally,
the chip duration (T
c
) determines the time resolution for a PN sequence based setup.
8
EPS Angers 2015 2015 - European Project Space on Information and Communication Systems
8

Maximum CIR Length: The frequency step size ( f
s
) of the VNA determines the maxi-
mum observable delay spread, i.e. the maximum time delay until the MPCs are observed
and the corresponding distance range [5] are
L
CIR(t)
= 1/ f
s
and L
CIR(d)
= c/ f
s
(10)
On the other hand, if only a single pulse is transmitted, L
CIR(t)
is limited by the stor-
age capacity of the receiver oscilloscope. For time domain periodic pulse sounding, the
repetition rate determines the maximum unambiguous delay spread or impulse response
length [9]. Thus
L
CIR(t)
= N
PN
·T
c
and L
CIR(d)
= c ·N
PN
·T
c
(11)
are the maximum unambiguous range for PN sequence based setups. It may be noted
that for m-sequences the length of PN sequence, N
PN
= 2
k
−1, where k is a positive
integer.
Dynamic Range: The dynamic range is defined by the difference between the largest
and smallest amplitudes of the received multipath components
DR = 20 log
10
[max{h(t)}/ min{h(t)}] (12)
which can be directly evaluated from the CIR. The minimum amplitude of h(t) refers
to the value still observed above the noise floor. Alternately, a ratio between the peak
amplitude and noise floor can be used to measure DR. This definition is generally used
for VNA measurements.
For a PN sequence based sounder, the DR may be found from [10]
DR = 10 log
10
(N
PN
) = 10 log
10
(2
k
−1) (13)
This is also known as the processing gain (PG).
In frequency domain sounding, there are certain other parameters of interest such as
intermediate frequency filter bandwidth (BW
IF
) and output transmit power of the VNA
(P
VNA
). If P
VNA
is set to 0 dBm, the s parameters correspond to the received power
measured in dBm. Further, P
VNA
and the noise floor together define the dynamic range.
On the other hand, by reducing BW
IF
the measurement accuracy can be improved. The
cost paid is the increase in the measurement time.
3.2 Test Vehicle and Parking Lot Environment
The vehicle under study is a right-hand drive, regular four-door sedan Skoda Octavia III
(model 1.8 TSI Combi) with dimensions 4.659m (length) × 1.814m (width) × 1.462m
(height), which was parked six storeys beneath ground level in the multi-floored un-
derground garage of the Faculty of Electrical Engineering (FEKT), Brno University of
Technology (VUT). Reinforced concrete walls and floors of the garage provided us with
an environment that was free from any narrowband interference (e.g. WiFi, Cellular).
Also, there were no other cars parked in close vicinity [11].
9
Intra Vehicular Wireless Channel Measurements
9

Entrance
FEKT, VUT
Ceiling
Floor
Test
Vehicle
Fig. 1. Underground garage where the measurements were conducted (left) and test vehicle
(right).
3.3 Tx/Rx Antennas and their Placement
Vertically polarized monopole conical antennas were used for UWB sounding experi-
ments. As suggested by Fig. 2, the radiation pattern exhibits omnidirectional character-
istics over H-plane which is invariant in the frequency band of interest. Since the radi-
ation pattern of the conical monopole antenna [12] is very close to the omnidirectional
radiation pattern, we were able to capture a maximal number of multipath components
(reflected waves). Due to a variable gain in the lower half E-plane radiation pattern (el-
evation angle from 90
◦
to -90
◦
), the antennas were placed in the car compartment so that
the upper half E-plane radiation pattern, which is almost constant, was used. It means
that when the antenna was placed at the cabin ceiling, it was set as bottom up. How-
ever, the reflected waves arriving from Tx antenna or incident on Rx antenna at lower
elevation angles might be affected by the non-ideal radiation pattern of the antennas.
For the mmW band, we used a pair of open rectangular waveguide antennas (WR
15) for transmission and reception. As seen from Fig. 2, the radiation patterns are
non-uniform. Currently, some work on developing slot antennas for mmW band are in
Fig. 2. Antenna used for UWB (top) and mmW (bottom) measurements with corresponding radi-
ation patterns.
10
EPS Angers 2015 2015 - European Project Space on Information and Communication Systems
10

progress which would result in more uniform patterns [13]. For both UWB and mmW
measurements, in order to avoid a degradation of the measured phase accuracy due to
movements of the Rx antenna, phase-stable coaxial cables were used and included in
the calibration process.
During the measurements, the Rx antenna had been placed on the driver’s seat and
on all other seats beside and behind the driver to imitate a hand-held mobile wireless
device that belongs to either the driver or to a passenger. A plastic photographic tripod
(JOBY GorillaPod) was used to maintain proper height (hand to lap separation) of the
Rx antenna. The tripod was useful to keep the inverted cone base of the antenna in
horizontal position for the UWB band and it helped in mounting the the Rx antenna in
a face-to-face orientation for mmW band.
Determination of the Tx antenna positions were governed by two parallel objec-
tives. First, the positions should resemble possible installation site for future in-vehicle
wireless systems. For example, in modern cars the back roof may serve as a wireless
docking station because this place usually contains some wiring and antenna for audio
system or GPS. The second goal is to realize both LoS and nLoS scenarios.
4 Measurements in the Ultra Wide Band
The UWB measurements formed the majority of our activities as the the experiments
overlaps with the activity plan for both the projects, GACR [1] and SoMoPro [2]. We
have developed 3 different channel sounding set-ups using the available off-the-shelf
hardware. The first set-up reflects a basic time-domain approach and involves pulse
sounding. To improve the dynamic range, another time-domain set-up based on PN
sequence was later developed. The third set-up pertains to frequency domain sounding
and was realized using a VNA.
4.1 Direct Time Domain Measurements
The UWB time domain channel sounding measurements were performed inside the pas-
senger compartment of the car in static condition. A Gaussian sine pulse was generated
through the Tektronix AWG70002A waveform generator and was amplified through a
high power amplifier (HPA) before feeding the signal to a wideband conical monopole
antenna. The probing pulse used for intra vehicular UWB channel sounding has the
form
s(t) =
q
2
√
2/
t
d
√
π
exp
h
−(t/t
d
)
2
i
cos(2π f
c
t + φ) (14)
having unit energy, initial phase φ = 0.6π, and an effective pulse duration of 2t
d
= 0.276
ns on either side. The carrier frequency, f
c
= 6.5GHz, was set at the middle of the FCC
approved band (3GHz to 10GHz).
At the receiver side an identical conical monopole antenna is placed which receives
the signal. The signal is then amplified through a low noise amplifier (LNA) and viewed/
stored in a digital sampling oscilloscope Tektronix DPO72004C. For the HPA, we used
Wenteq broadband power amplifier ABP1200-01-1825 which provided a gain of around
19 dB, whereas for the LNA, a Wenteq ABL1200-08-3220 was used that had a small
11
Intra Vehicular Wireless Channel Measurements
11

HPA
LNA
Arbitrary
waveform
generator
Mixed signal
oscilloscope
Tektronix
AWG70002A
Tektronix
DPO72004C
Power
Supply
MATLAB
12V DC12V DC
Synchronization
ABP1200-01-1825
ABL1200-08-3220
Tx Antenna
Rx Antenna
UWB Transmission
Fig. 3. UWB time domain measurement setup [14].
signal gain of 32 dB and a noise figure of 2 dB. Fig. 3 depicts the interconnections of
the apparatus.
1R
5M
1M
1L
2L
2R
3R
3L
4R
4M
4L
1R
1M
1L
2L
2R
3M
4M
5M
1
2
3
4
5
1
2
3
4
5
Fig. 4. Antenna placement in the car [14], RED: Tx antennas, BLUE: Rx antennas.
As shown in Fig. 4, a total of 52 different Tx-Rx antenna positions, with separations
ranging from 0.56m to 1.9m, were tested with different degrees of passenger occupancy.
Some measurements were repeated to investigate temporal variation, which were found
to be negligible. It may be noted that although the car can accommodate four persons,
we could vary the passenger count (including the driver) only up to three, as one of the
places was always occupied by the receiver antenna and its attachments.
The received signal, r(t), for a particular measurement can be represented as
r(t) = h
Rx,Ant
∗h(t) ∗h
T x,Ant
∗s(t) = s
re f
(t) ∗h(t) (15)
where h
T x,Ant
and h
Rx,Ant
are the impulse responses of the Tx and Rx antennas, and
s
re f
(t) = h
Rx,Ant
∗h
T x,Ant
∗s(t) is the reference input template that was obtained by mea-
suring the response of the input s(t) in an anechoic chamber free from reflectors/ diffrac-
12
EPS Angers 2015 2015 - European Project Space on Information and Communication Systems
12

tions. The reference distance between Tx and Rx antennas for measurement of s
re f
(t)
was set to 1 m.
0 5 10 15 20
-0.4
-0.2
0
0.2
0.4
0.6
0.8
CIR
Time [ns]
Fig. 5. Extracted CIR through modified CLEAN [14].
Next, CIRs were obtained by deconvolving the received signals with the input tem-
plate using the modified CLEAN algorithm. The modified CLEAN algorithm [15] was
faster and more accurate than the basic CLEAN algorithm [16] as shown in [14] through
a detailed statistical performance comparison over a standard IEEE 802.15.3 channel
simulation testbed. A typical impulse response is shown in Fig. 5 with the Tx antenna
set at the left side of the windscreen near the roof (2L in Fig. 4) and the Rx antenna is
placed on a tripod on the rear passenger seat on right (4R in Fig. 4) position. In gen-
eral, it was found that nLoS conditions yielded more MPCs in the CIR compared to
the cases when a direct LoS path exists between Tx and Rx antenna. This was due to
presence of multiple reflected and diffracted paths inside the passenger compartment.
The dynamic range can be increased by decreasing the threshold of the deconvolution
algorithm. However, there is a possibility that fictitious entries would appear in the CIR
profile due to noise, if the threshold is set too low.
Next, the CIR profiles obtained after the postprocessing via CLEAN were utilized
to extract the RMS delay spread. After analyzing RMS delay spread values for different
Tx-Rx distances, it was found that there exists only a weak correlation. On the other
hand, it decreased consistently with higher passenger occupancy across all different
Tx-Rx settings. For example, when the TX and Rx antennas were set to positions 4R
and 1L positions (refer to Fig. 4), τ
rms
values were 6.8880 ns, 6.3442 ns, 5.6712 ns and
4.9847 ns with no passenger, with driver (D), with driver and front passenger (D and
FP) and with driver, front passenger, and the rear passenger on left (D, FP, and RPL),
respectively. The reduction in delay spread can be accounted for the obstruction and
absorption of several MPCs by human body.
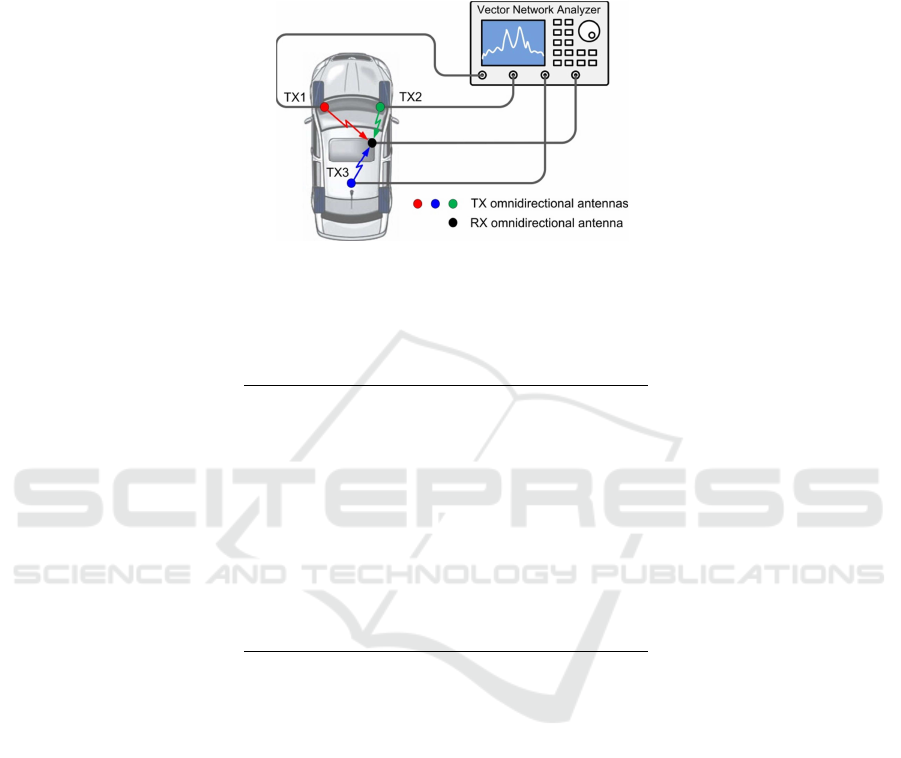
4.2 Frequency Domain Measurements
The frequency domain measurements were realized with a 4 port vector network an-
alyzer Agilent Technologies E5071Ca inside the passenger compartment of the car.
Three ports were connected to three transmitting antennas and the fourth port was con-
nected to a receiving antenna. The multiple input single output (MISO) channel sound-
ing setup is shown in Fig. 6, and the measurement parameters are listed in Table 1. The
13
Intra Vehicular Wireless Channel Measurements
13
scattering parameters, i.e. s
41
, s
42
and s
43
, were recorded which serve as the frequency
domain channel transfer functions.
Fig. 6. UWB MISO measurement setup [17].
Table 1. VNA parameters for UWB measurement.
Parameter Description Value
f
L
Start frequency 3 GHz
f
H
Stop frequency 11 GHz
BW Bandwidth 8 GHz
N
VNA
Number of points 801
f
s
Frequency step size 10 MHz
t
res
Time resolution 0.125 ns
d
res
Distance resolution 3.75 cm
L
CIR(t)
Maximum CIR length (time) 100 ns
L
CIR(d)
Maximum CIR length (distance) 30 m
BW
IF
IF filter bandwidth 100 Hz
P
VNA
Transmit power 5 dBm
H
fil
( f ) Windowing for IFFT Blackmann
The Rx antenna is placed at various locations inside the car compartment, on all
seats and in the boot, and the Tx) antennas are placed on the left and right side of the
dash-board, top corners of the windshield and at the rear part of the ceiling. There were
altogether 90 possible Tx-Rx combinations (for details of antenna placement, please
refer to [17]). The channel measurements are carried out for both, LoS and nLoS sce-
narios. nLoS is caused by the backrest of the seats, the dash-board, and/or persons
sitting inside the vehicle.
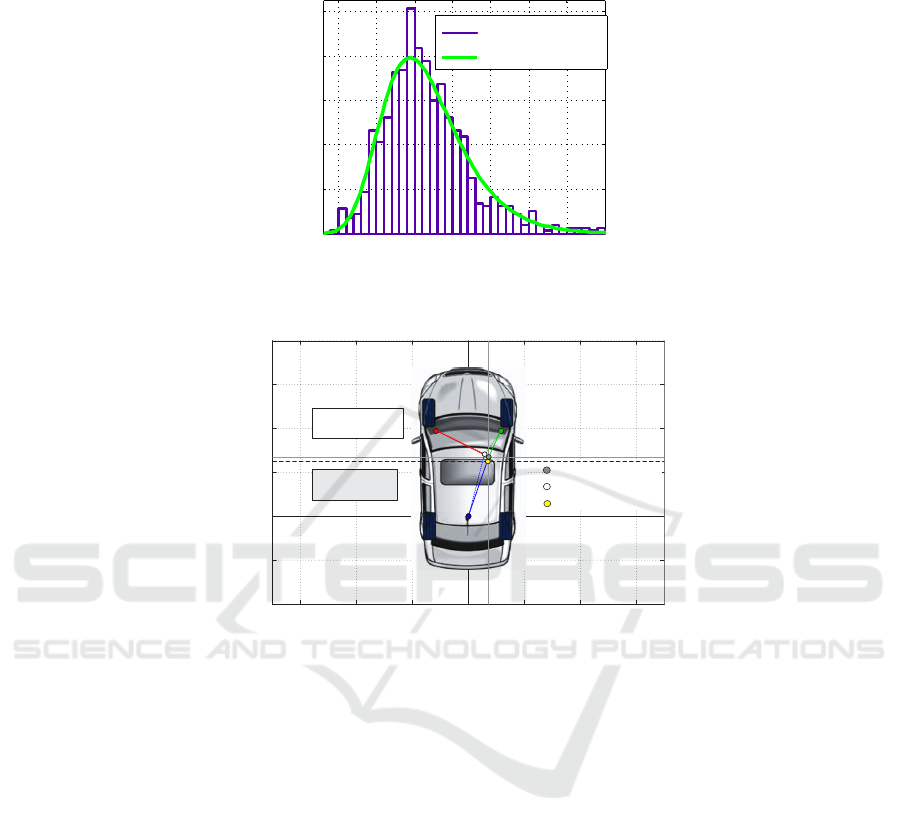
When a statistical description of the received amplitude is attempted, it was found
that they obey a generalized extreme value (GEV) process of type I
f (x) = (1/σ)exp[−z −exp(−z)] ; z = (x −µ)/σ (16)
with µ being the location parameter and σ the distribution scale parameter. Fig. 7 shows
PDF of the received signal magnitudes in dBm fitted with the GEV statistics.
14
EPS Angers 2015 2015 - European Project Space on Information and Communication Systems
14
30 35 40 45 50 55 60 65
0
0.02
0.04
0.06
0.08
0.1
Magnitudes of received signal
Density
PDF of received
signal magnitude in dBm
GEV fit
Fig. 7. Received signal amplitude statistics [17].
-300 -200 -100 0 100 200 300
-200
-100
0
100
200
300
400
X coordinates [cm]
Y coordinates [cm]
x=36.3685cm
y=131.665cm
x=31.0792cm
y=135.2535cm
8 GHz bandwidth
1.58 GHz bandwidth
Correct position
Fig. 8. Localization of the Rx antenna using TOA [17].
The experiment was repeated for a part of the whole UWB bandwidth, from 3.168
GHz to 4.752 GHz, with a bandwidth of 1.58 GHz as specified in the band 1 of the
ECMA 368 standard [18], with 159 frequency points maintaining the same frequency
step size ( f
s
). The goal was to test the feasibility of ranging and localization in the
whole UWB and its part. The receiver antenna position was estimated through the time
of arrival (TOA) technique, i.e. by finding rough distance of the Rx antenna from three
Tx antennas and performing subsequent ranging in two dimension (2D).
The whole process involved four steps, namely calculation of the CIR, detection
of the first incident ray, calculation of the Tx-Rx distances for all 3 Tx antennas, and
finally performing the Rx antenna localization. The first ray arrival was detected through
a peak search algorithm to find the strongest MPC above the noise floor. However, the
drawback was, if the first or direct path is immersed in the noise floor, the algorithm
fails. this situation is encountered in mostly nLoS cases where the direct path is highly
attenuated. Once the first ray is detected, the corresponding distance is calculated by
multiplying the delay (τ
0
) with the traveling speed of electromagnetic wave (c). Finally,
the RX antenna localization is achieved through the trilateration technique [18]. Using
15
Intra Vehicular Wireless Channel Measurements
15
the three calculated distances this technique allows 2D localization. Fig. 8 displays the
result of localization in both the bands. The Rx antenna was placed on front passenger
seat. It was important to identify the seat as in most in-vehicle localization applications
(e.g. smart air bag, personalized communication profile etc.) we need to know the seat
of the passenger holding the electronic communication device.
The error in ranging was less when the whole UWB was utilized rather than the
first band. Also the ranging errors increased considerably in presence of passengers.
The possible sources of error are, difference between calibration plane and phase center
of antenna, inaccurate reference measurement, inaccuracy in estimating the first ray
detection due to sampling, incorrect MPC detection and variation of wave propagation
velocity in nLoS conditions [17].
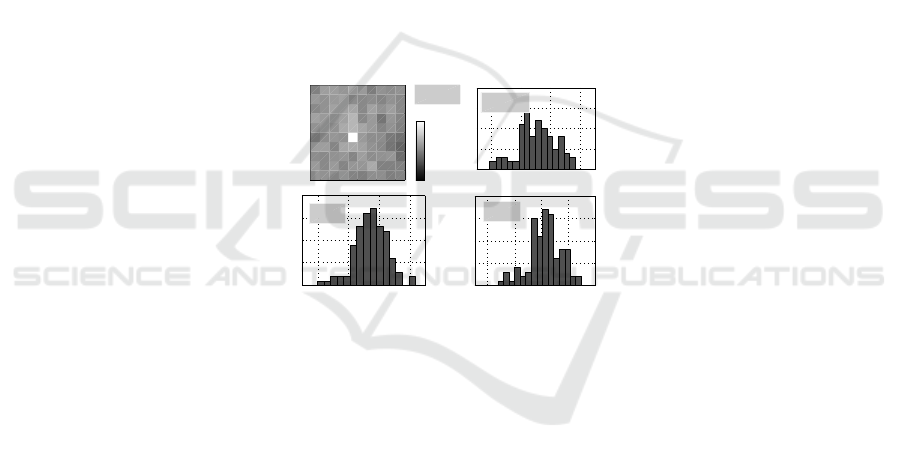
Next, in another set of experiments, we used a similar 3 × 1 MISO setup and shifted
the receiving antenna over a 10 ×10 spatial grid using a polystyrene rack having a 3 cm
grid distance [19]. The idea was to study the spatial channel stationarity evaluated via
Pearson correlation coefficients between absolute values of measured CIRs. The device
configuration and the measurement parameters listed in Table 1 were unaltered except
the frequency step size which was increased to 100 MHz for a faster measurement cycle.
Further, the windowing for IFFT was rectangular in this set of experiments.
0.4 0.5 0.6 0.7
0
5
10
15
20
ρ
0.3 0.4 0.5 0.6
0
5
10
15
20
ρ
0.3 0.4 0.5 0.6 0.7
0
5
10
15
20
ρ
2 4 6 8 10
2
4
6
8
10
0
0.2
0.4
0.6
0.8
ρ
α = 2
α = 3
α = 1
α = 1
Fig. 9. Map of the correlation coefficient and their histograms [19].
Results of the spatial stationarity study are plotted in Fig. 9. The plots reflects the
square geometry of our polystyrene rack. For Tx 1 (α = 1), the map of correlation
coefficient (ρ) shows that the impulse response in time domain is spatially stationary
with a mean value of ρ
1
≈ 0.55. This behavior is typical also for Tx 2 (α = 2) and Tx
3 (α = 3). The histograms of ρ
1
, ρ
2
and ρ
3
are also plotted in Fig. 9.
The complex channel transfer functions (H( f )) obtained through the various set of
measurements were converted to the respective envelope delay profiles or EDPs (|h(t)|)
through IFFT operation. It was observed that the EDP is composed of large-scale vari-
ations (LSV), ℘(t), and small-scale variations (SSV), ξ(t). Further, the LSV part can
be characterized by two different exponentially decaying functions, applicable to two
different range of delay spreads
℘(t) =
(
℘
1
(t) ;0 ≥ t < τ
b
℘
2
(t) ;τ
b
≥t < τ
max
(17)
16
EPS Angers 2015 2015 - European Project Space on Information and Communication Systems
16

0 10 20 30 40 50 60 70 80 90
−100
−80
−60
−40
−20
τ [ns]
Envelope−delay profile [dB]
2 4 6 8 10
−50
−40
−30
−20
τ [ns]
pre−
cursors
℘
1
1
*
℘
1
2
*
℘
1
2
*
℘
1
1
*
Fig. 10. Average EDP and the LSV parts [19].
where
℘
1
(t) = A + B exp(−C ·t), ℘
2
(t) = D exp(−E ·t), (18)
and τ
b
refers to the breakpoint in the delay spread domain. For our case it was about 4
ns. Fig. 10 shows the two different parts of the LSV of the PDP for the link between Tx
1 and Rx.
For the SSV, there exists no deterministic model as it is random. Exploiting the max-
imum likelihood estimation (MLE), we parametrized the superimposed SSV, ξ(t) =
EDP(t) −℘(t), using the GEV distribution. The compbined model of EDP was vali-
dated through a two-sample Kolmogorov-Smirnov (K-S) test.
4.3 PN Sequence based Time Domain Measurements
Compared to the direct time domain setup, a PN sequence based time domain sounder is
simple to realize and replicate, provides correlation gain and does not sacrifice dynamic
range much. It is also generally is cheaper and faster than the VNA based frequency
domain setup.
The time domain channel sounder utilizing pseudo random binary sequences (PRBS)
Fig. 11. PRBS based measurement setup [20].
for UWB was built from several off-the-shelf laboratory instruments as depicted in Fig.
11. The PRBS is generated via Anritsu signal quality analyzer MP1800A at a rate of
f
PN
= 12.5 Gbits/s with maximum RF output power of 13 dBm. At full rate the output
17
Intra Vehicular Wireless Channel Measurements
17

chip duration is T
c
= 1/ f
PN
= 80 ps. Our m sequence used a k value of 11, which
gives a processing gain, PG = 10 ·log
10
(2
31
−1) ≈ 31 dB. There is no point in using
a higher k value, i.e. lengthening the m sequence as the PDP will contain the same
information with extended noise floor. Additional processing gain as well as dynamic
range can be obtained by averaging the repeated trail of sequences. Also the value of
T
c
and k determine the maximum length of CIR in time and in distance domains, which
according to (11) are, 163.76 ns and 49.13 m, respectively.
DSO Tektronix MSO72004C is utilized as a receiver. It provides 4 channels, 16
GHz bandwidth, 50 GS/s real time acquisition rate and 31.25 ms of data storage per
channel which equals to 0.625 ms at sampling rate of 50 GS/s. As the acquisition rate
of the DSO is 4 times of f
PN
, the same chip is sampled 4 times. Another point to note
is, for k = 11, the time period of the m sequence is, T
p
= N
PN
·T
c
= 163.76 ns, and
only N
meas
= 0.625ms/163.76ns = 3816 CIRs can be captured at once. Nevertheless,
using advanced triggering modes, the number can be increased. It is also possible to
continuously stream the real time acquired data to a personal computer (PC).
The signal quality analyzer also provides 10 MHz reference and gating or trigger-
ing signal to the oscilloscope. These are used for synchronization purposes. Compatible
HPA and LNA may be included in the Tx and Rx chains, respectively, to boost the dy-
namic range of the system. A PC can be used to control the instruments and interchange
data to provide additional features (e.g. real-time and continuous channel sounding) but
is not necessary for the data acquisition.
The received data is correlated with the same transmitted PN sequence. For faster
calculation, the correlation operation in the time domain is realized as a multiplication
operation in the frequency domain. This action has some additional advantages too. For
UWB, the band of interest is 3 GHz to 11 GHz. The spectral components outside this
band is filtered out in the frequency domain.
0 5 10 15 20 25 30
−60
−40
−20
0
Distance [m]
Normalized CIR [dB]
VNA
PRBS
Fig. 12. Comparison of CIR measurements using VNA and PRBS based system [20].
In Fig. 12, a comparison of measurement results utilizing VNA and the proposed
system is shown. The measurements were performed in an anechoic chamber with con-
ical monopole antennas separated by 2 m distance from each other. Received time do-
main signal was amplified utilizing external LNA. The horizontal axis of Fig. 12 is
expressed in spatial distance instead of time lag delay. It clearly shows the first arriving
multipath component at time corresponding to the distance of 2 m. There are some other
multipath components that start arriving at the distance 3.64 m, which is caused by re-
18
EPS Angers 2015 2015 - European Project Space on Information and Communication Systems
18
flections from laboratory instruments, antenna holders and feeding cables. This picture
clearly shows the agreement between measurements performed by the VNA and pro-
posed system. However, the measurement carried out by PRBS system contains some
spurious peaks caused by non-linear devices in the measurement chain [21].
Recently, using this setup, UWB measurement in both the time and frequency do-
main for comparison purpose were also performed. The antenna positions for the both
domain were set identical. Currently, the results are being analyzed.
5 Measurements in the mmW Band
For time domain measurement in the millimeter wave band, it was originally proposed
to use a similar setup used in Section 4.1, i.e. with an arbitrary function generator and
DSO, and the signal would be up converted to the mmW band before feeding it to a
compatible Tx antenna (and down converted before feeding it to the DSO). An UWB
to mmW FC1005V Silversima up-down converter was procured for the purpose. How-
ever, the large group delay (1ns/GHz) prohibited us using the setup. Thus the mmW
band measurements performed so far are restricted to the frequency domain which are
realized with a VNA.
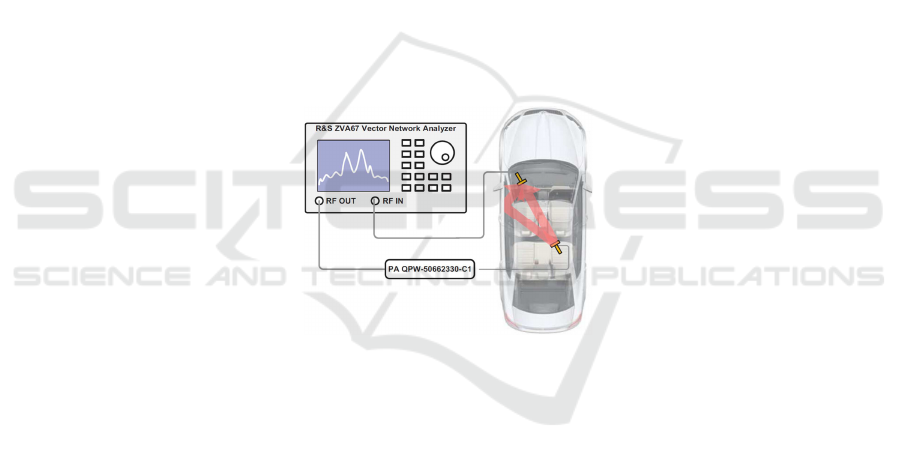
Fig. 13. mmW measurement setup [22].
In the first set of experiments, a 4-port vector network analyzer, Rhode and Schwarz
ZVA67, was used for measuring the transmission coefficient between two mmW anten-
nas in the frequency band 55-65 GHz. Because of the low output power available at
analyzer transmitter ouput, Quinstar power amplifier QPW-50662330-C1 was utilized
to raise the transmitted signal level, thus only one signal path (instead of three in the
UWB band) could be measured at once. The single input single output (SISO) channel
sounding setup is shown in Fig. 13, and other measurement parameters are listed in
Table 2.
The places for Tx antennas are chosen to imitate handheld mobile devices that be-
long to a person sitting in the car. Furthermore, the Rx antennas are located to have a
good coverage of vehicle space. A pair of open waveguide WR15 were used as Tx and
Rx antennas. The measurement setup was calibrated for zero transmission while the
waveguides were connected to each other.
19
Intra Vehicular Wireless Channel Measurements
19

Table 2. VNA parameters for mmW measurement.
Parameter Description Value
f
L
Start frequency 55 GHz
f
H
Stop frequency 65 GHz
BW Bandwidth 10 GHz
N
VNA
Number of points 1001
f
s
Frequency step size 10 MHz
t
res
Time resolution 100 ps
d
res
Distance resolution 3 cm
L
CIR(t)
Maximum CIR length (time) 100 ns
L
CIR(d)
Maximum CIR length (distance) 30 m
BW
IF
IF filter bandwidth 100 Hz
P
VNA
Transmit power 5 dBm
H
fil
( f ) Windowing for IFFT Hanning
0 20 40 60 80 100
−120
−100
−80
−60
−40
Time [ns]
CIR magnitude [dB]
Measurement #17
UWB
MMW
Fig. 14. Comparison of mmW CIR with UWB CIR [23].
A comparison of the CIRs obtained in the UWB and mmW band, when Tx antenna
was at driver seat and Rx antenna is on the left side of the dashboard, is shown in Fig.
14. It can be seen that mmW CIR profile decays faster than the UWB. Moreover, the
peak (caused by first/ direct path arrival) in mmW band is more distinctive compared to
the UWB band peak. This is caused by frequency dependence of absorption parameters
of materials that are used in modern cars [24].
Next, a comparison of ranging accuracies in the UWB and mmW band was at-
tempted [25]. There were a series of steps involved in order to estimate the Tx-Rx
distance. First, the measured complex channel transfer function was converted to the
corresonding complex CIR function through IFFT. A Hann window was applied to mit-
igate leakage in time domain. Then, the first peak in absolute magnitude of CIR profile
was detected utilizing semi-adaptive algorithm. The algorithm works with a threshold
calculated from the maximum and mean value of the absolute magnitude of CIR, and
it reports the first value above that threshold. A proper peak is identified in the neigh-
borhood of that delay spread point. The distance corresponding to the detected peak is
computed by multiplying the delay value and speed of light.
The ranging experiment in an empty car showed that while the distance measure-
ment is having an average error and standard deviation of error of 6.7 cm and 8.3 cm
for UWB, the values are 1.2 cm and 4.5 cm for the mmW band. For an occupied car, a
20
EPS Angers 2015 2015 - European Project Space on Information and Communication Systems
20

switch from UWB to mmW would cause to lower the average error from 9 cm to 2 cm
and the standard deviation is reduced from 10.1 cm to 4.5 cm [23]. It may be concluded
that mmW band is more suitable for precise distance measurement, probably due to
favorable material properties, therefore enhancing the distinctiveness of the first arrival
multipath component. However, one should keep in mind that during experiments, the
antenna positions were not identical for UWB and mmW because of the physical di-
mensions of used antennas. The maximum difference is 29 cm, but it is less in most of
the cases. Also the distance was measured manually with a ruler which might introduce
some error in measurement.
In another set of experiments, we used same waveguides as antennas. The device
configuration and the measurement parameters listed in Table 2 were unaltered except
the windowing for IFFT which was rectangular in this set of experiments. The Rx an-
tenna has been placed at different spatial points inside the car compartment, on all seats,
trunk and in front of the seats. The Tx antenna has been placed on the left and right side
of the dash-board and at the rear part of the ceiling (for details of antenna placement,
please refer to [22]).
Based on the data obtained from the measurement we proposed a channel model for
mmW band utilizing a similar approach as in [19], i.e. decomposition of the magnitude-
delay profile into the small and large scale variations. The LSV trend has been found
by the Hodrick-Prescott [26] detrending filter. A Hodrick-Prescot filter works like a
moving average filter and it separates the trend and cyclical components but do not
cause data loss. On the other hand, we found out that the best fit to the superimposed
SSV is achieved by the GEV distribution.
There had been also subsequent mmW measurements in frequency domain using
ZVA67, QPW-50662330-C1, and Rotagrip precision cross table (for antenna position-
ing). The aim of this measurement was to study the spatial stationarity in the mmW
band. The spatial grid used for antenna positioning was set to 4 mm. The same mmW
measurement with the Quinstar low noise preamplifier QLW-50754530-I2 and with ap-
plication of the extended calibration technique using mmW attenuator in order to get
larger SNR was also performed. The data set is currently being analyzed.
6 Narrowband Measurements
Due to large popularity of the Wireless Access for the Vehicular Environment (WAVE)
technology in the 5.8 GHz band, we carried out a few measurements in this narrowband
domain and compared our results with UWB.
For measuring and recording the transmission coefficient between transmitter and
receiver, a 4-port VNA from Agilent Technologies, E5071C [27] was used. The mea-
surement parameters are listed in Table 3. A single input multiple output (SIMO) mea-
surement setup was realized with one Tx and three Rx antennas. The four omni di-
rectional conical monopole antennas that were used are identical. Real and imaginary
parts of the transmission coefficients (s
x1
) were exported to MATLAB. The frequency
domain data over the entire bandwidth BW = 100 MHz were partitioned into 10 MHz
bins, where each bin corresponds to a sub-channel of 802.11p. All results were trans-
formed from the frequency domain into the time domain utilizing the IFFT with a typ-
21
Intra Vehicular Wireless Channel Measurements
21
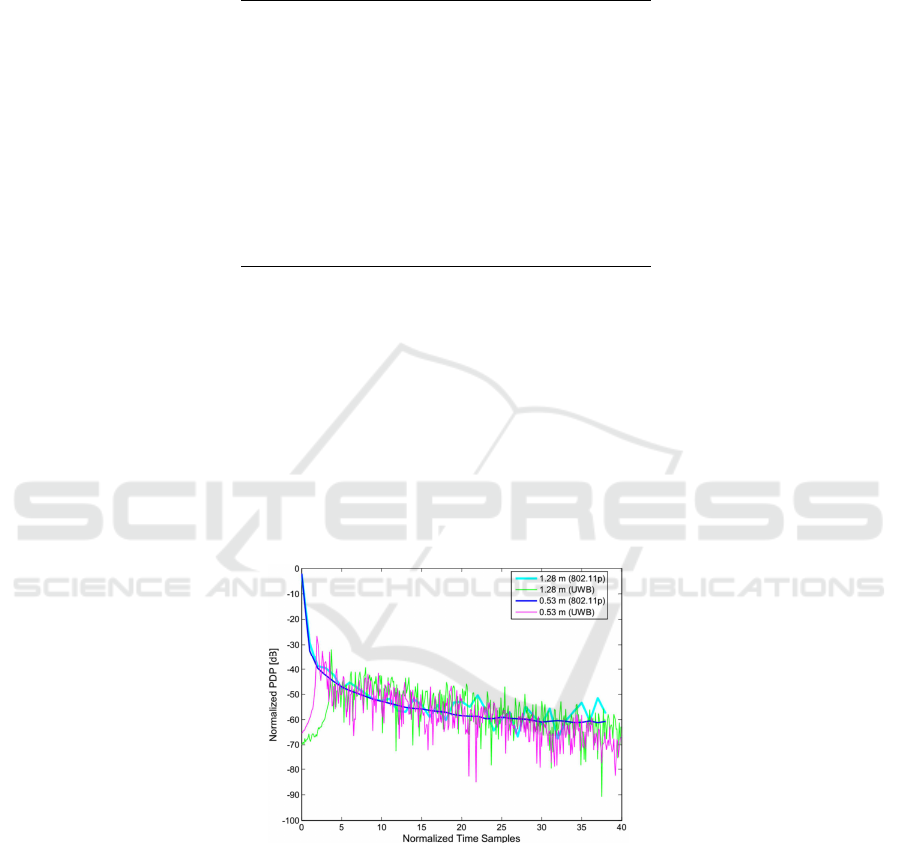
Table 3. VNA parameters for narrowband measurement.
Parameter Description Value
f
L
Start frequency 5.775 GHz
f
H
Stop frequency 5.875 GHz
BW Bandwidth 100 MHz
N
VNA
Number of points 801
f
s
Frequency step size 0.125 MHz
t
res
Time resolution 10 ns
d
res
Distance resolution 3 m
L
CIR(t)
Maximum CIR length (time) 8 µs
L
CIR(d)
Maximum CIR length (distance) 2.4 km
BW
IF
IF filter bandwidth 100 Hz
P
VNA
Transmit power 0 dBm
H
fil
( f ) Windowing for IFFT Rectangular
ical rectangular window. The PDP was calculated by averaging over 10 sub-channel
time domain data.
A total of 15 different Tx-Rx combinations were tested with separations ranging
from 0.53 m to 3.38 m. The Tx antenna was placed at three different locations inside
the vehicle and at two locations outside the vehicle. In-car Tx antenna positions were
set at the right rear seat, armrest in the middle of the car, driver seat, while for locations
outside the car two positions at a height 1.09 meters were chosen; one in front of the car,
and the other one near the right headlamp. The Rx antennas were installed on the left
and right upper edges of the windshield and on the roof in the rear part of the vehicle.
The positions of antennas were chosen for realizing both LoS and nLoS scenarios.
Fig. 15. Comparison of narrowband PDP with UWB PDP [28].
We compared our results for 802.11p protocol with measurements for UWB (3 GHz
- 11GHz) performed using the same VNA based setup. The number of measured points
were the same, however, due to the larger BW (8 GHz) and a frequency step size of f
s
=
100 MHz, we have a smaller time range t
d
= 1/ f
s
= 10 ns. Thus we cannot compare the
PDPs in an one-to-one basis. For analyzing LSV models we use a scaled comparison
22
EPS Angers 2015 2015 - European Project Space on Information and Communication Systems
22
instead. Fig. 15 shows the UWB and the 802.11p normalized PDP vs normalized time
samples. For UWB, it was found that the PDP constitutes one (or a few) major peaks
followed by somewhat linear decreasing slope. The reader may also note the delay
and lower power for the first peak of the UWB PDP. In addition, the delay and the
maximum value of the peak is more for larger distances between the transmitting and
receiving antennas. However, this phenomena is not observed in narrowband 5.8 GHz
measurements for 802.11p.
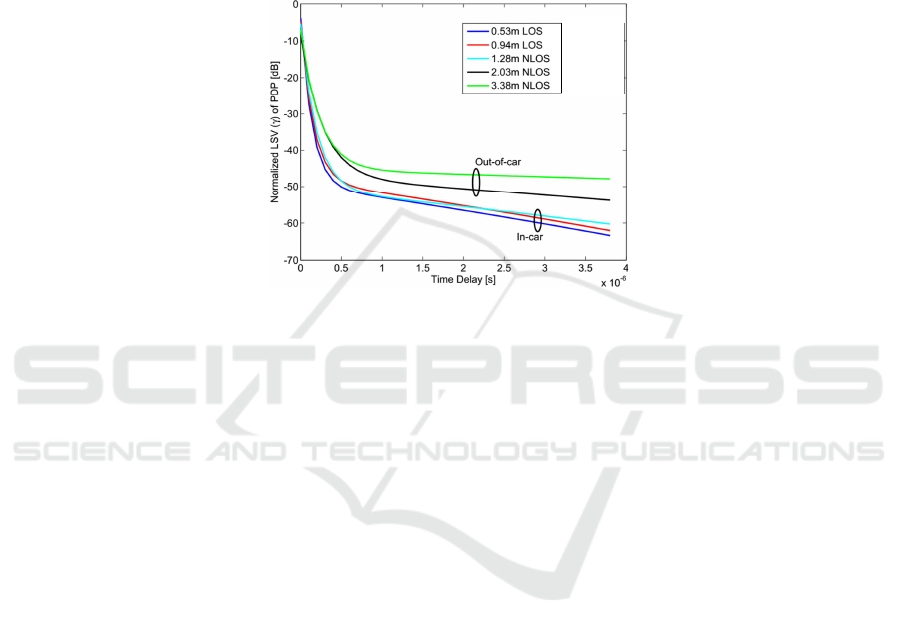
Fig. 16. The average trend of the PDP for narrowband measurements [28].
As far as the PDP is concerned, it includes LSV and SSV, which can be designated
mathematically in the following manner: PDP(t) = ℘(t) + ξ(t), where ℘(t) denotes
LSV and ξ(t) is the SSV. We expressed the LSV with a two-term exponential model
℘(t) = A exp(B ·t) +C exp (D ·t) ; 0 < t < τ
max
(19)
where the first term includes power from direct and major reflected rays, and the second
term, with a very low slope (close to linear) reflects the power from diffused multipath
components. The LSVs for the two-term exponential model for different distance be-
tween Tx and Rx antennas of 0.53 m, 0.94 m, 1.28m, 2.03 m, and 3.38 m are shown
in Fig. 16. Next, the SSVs are separated from the PDP by subtracting the LSV, and are
characterized utilizing logistic, GEV, and normal distributions. Two sample K-S tests
validated that the logistic distribution is optimal for in-car, whereas the GEV distribu-
tion serves better for out-of-car measurements.
7 Future Activities
7.1 Measurements in the IR Band
The IR channel models for the intra-vehicle environment have been published in only
a handful of literature [29], and active research is going on this field worldwide. The
GACR project goal was to test the viability of intra vehicular IR WPAN systems. The
23
Intra Vehicular Wireless Channel Measurements
23

first few testbeds for measurement were prepared in line with the UWB and mmW
setups, i.e. for frequency domain characterizations a VNA based setup was proposed
with optical transmitter (OTx) and optical receiver (ORx) directly coupled with VNA
measuring the band between 1 to 5 GHz. In time domain, it was proposed to realize the
same with a pulse generator and an oscilloscope.
Fig. 17. IR measurement setup.
The IR measurement performed in time domain revealed some shortcomings of the
IR measurement setup, e.g. limited modulation depth of the Mach-Zehnder modulator
andr large coupling loses between optical fibers and optical lenses resulting in very
small SNR. For the new measurements the coupling loses were reduced by the modi-
fication and improvement of the mechanical parts of the OTx and ORx lenses leading
to better focusing of the optical beams into the optical fibers. A planned measurement
setup with network analyzer is shown in Fig. 17. The oscilloscope probe will be used
as receiver. The optical signal will be genreated from a Fabry-Perot FP 1009P laser
and will be modulated by the RF signal, fed from analyzer through Wenteq ABP1200-
01-1825 broadband power amplifier, with a JDSU APE microwave analog intensity
modulator.
Analysis and modeling of the IR channel will be performed in the same way as
in the case of UWB and mmW channel modeling. For the comparison purpose the
same characteristics (PDP, excess delay and RMS delay spread, etc.) and statistics (data
fitting by the proper distribution) will be studied and mathematical channel models will
be created.
7.2 Localization
We will continue with the development of a robust algorithm for accurate estimation
of the first multipath component arrival time (based on correlation receiver, matched
filter receiver, receivers using various estimators such as maximum likelihood or mean
square error estimator, or sparse signal reconstruction techniques). Then we are going
to investigate the spatial distributions of the power path loss in the car compartment in
order to analyze the accuracy of received signal strength (RSS)-based localization tech-
nique and its possible improvement using fingerprinting method. We would also like
to assess possible application of the angle of arrival (AOA)-based positioning system
and estimate its positioning capability. According to the topicality and desirability of
the AOA-based positioning techniques we will measure the arrival angles and analyze
24
EPS Angers 2015 2015 - European Project Space on Information and Communication Systems
24

their statistical characteristics. All the above measurements will be performed for LoS
and nLoS scenarios for an empty and an occupied car and for a different deployment of
reference nodes.
7.3 Other Activities
In the next year, measurement in mmW band will be performed with the newly de-
veloped slot antenna array based on the substrate integrated waveguide (SIW) technol-
ogy with significantly better omnidirectional radiation pattern compared to the formerly
used open waveguide. Further we are going to examine effect of non-stationary envi-
ronment in the car caused by running engine or loud sound produced by the built-in
audio system or by the movement of passengers on the mmW channel characteristics.
We also plan to extend the measurement to assess the effect and benefit of antenna ar-
rays through the virtual array [30] approach and would perform some measurements in
different brands of car and also in other vehicles such as tram or bus.
Acknowledgements. This work was supported by the SoMoPro II programme, Project
No. 3SGA5720 Localization via UWB, co-financed by the People Programme (Marie
Curie action) of the Seventh Framework Programme (FP7) of EU according to the REA
Grant Agreement No. 291782 and by the South-Moravian Region. The research is fur-
ther co-financed by the Czech Science Foundation, Project No. 13-38735S Research
into wireless channels for intra-vehicle communication and positioning, and by Czech
Ministry of Education in frame of National Sustainability Program under grant LO1401.
For research, infrastructure of the SIX Center was used. The generous support from
Skoda a.s. Mlada Boleslav are also gratefully acknowledged.
References
1. Department of Radio Electronics, Faculty of Electrical Engineering and Communica-
tion, Brno University of Technology: Research into wireless channels for intra-vehicle
communication and positioning, No.: GACR-13-38735S. Project documentation page:
http://www.radio.feec.vutbr.cz/GACR-13-38735S/ (2013–16)
2. JCMM, South Moravian Programme for Distinguished Researchers (SoMoPro): Lo-
calization using ultra wide band wireless systems: from algorithms to hardware imple-
mentation, Call: SoMoPro-II-2012-IG, No.: 3SGA5720. Project documentation page:
http://www.jcmm.cz/en/aniruddha-chandra.html (2014–16)
3. Molisch, A.F.: Wireless Communications. 2nd edn. John Wiley & Sons, West Sussex,
England (2011)
4. Chen, Q.: Wideband channel sounding techniques for dynamic spectrum access networks.
PhD Thesis, University of Kansas, Lawrence, KS, USA (2009)
5. Janssen, G.J.M., Stigter, P.A., Prasad, R.: Wideband indoor channel measurements and BER
analysis of frequency selective multipath channels at 2.4, 4.75, and 11.5 GHz. IEEE Trans.
Commun. 44 (1996) 1272–88
6. Pagani, P., Talom, F.T., Pajusco, P., Uguen, B.: Ultra Wide Band Radio Propagation Channel.
John Wiley & Sons, New Jersey, USA (2013)
7. Costa, N., Haykin, S.: Multiple-Input Multiple-Output Channel Models: Theory and Prac-
tice. John Wiley & Sons, New Jersey, USA (2010)
25
Intra Vehicular Wireless Channel Measurements
25

8. Mao, X.H., Lee, Y.H., Ng, B.C.: Comparison of wideband channel sounding techniques. In:
Proc. PIERS, Moscow, Russia (2009) 400–04
9. Parsons, J.D., Demery, D.A., Turkmani, A.M.D.: Sounding techniques for wideband mobile
radio channels: a review. IEE Proc. I (Communications, Speech and Vision) 138 (1991)
437–46
10. Albornoz, J.M.: A wideband channel sounder. MS Thesis, Ohio State University, Columbus,
OH, USA (2001)
11. Chandra, A., Blumenstein, J., Mikulasek, T., Vychodil, J., Marsalek, R., Prokes, A., Zemen,
T., Mecklenbrauker, C.F.: Serial subtractive deconvolution algorithms for time-domain ultra
wide band in-vehicle channel sounding. IET Intell. Transp. Sys. (2015) 1–11, In press
12. Kraus, J.D.: Antennas. Tata McGraw-Hill, New Delhi (1997)
13. Mikulasek, T., Lacik, J., Raida, Z.: SIW slot antennas utilized for 60-GHz channel charac-
terization. Microw. Opt. Technol. Lett. 57 (2015) 1365–70
14. Chandra, A., Blumenstein, J., Mikulasek, T., Vychodil, J., Pospisil, M., Marsalek, R., Prokes,
A., Zemen, T., Mecklenbrauker, C.: CLEAN algorithms for intra-vehicular time-domain
UWB channel sounding. In: Proc. PECCS, Angers, France (2015) 224–29
15. Liu, T.C.K., Kim, D.I., Vaughan, R.G.: A high-resolution, multi-template deconvolution
algorithm for time-domain UWB channel characterization. Can. J. Elect. Comput. Eng. 32
(2007) 207–13
16. Vaughan, R.G., Scott, N.L.: Super-resolution of pulsed multipath channels for delay spread
characterization. IEEE Trans. Commun. 47 (1999) 343–47
17. Blumenstein, J., Prokes, A., Mikulasek, T., Marsalek, R., Zemen, T., Mecklenbrauker, C.:
Measurements of ultra wide band in-vehicle channel - statistical description and TOA posi-
tioning feasibility study. EURASIP J. Wirel. Commun. Net. 2015 (2015) 1–9
18. Sahinoglu, Z., Gezici, S., G
¨
uvenc, I.: Ultra-wideband Positioning Systems: Theoretical Lim-
its, Ranging Algorithms, and Protocols. Cambridge University Press, Cambridge, UK (2011)
19. Blumenstein, J., Mikulasek, T., Marsalek, R., Chandra, A., Prokes, A., Zemen, T., Mecklen-
brauker, C.: In-vehicle UWB channel measurement, model and spatial stationarity. In: Proc.
IEEE VNC, Paderborn, Germany (2014) 77–80
20. Vychodil, J., Chandra, A., Mikulasek, T., Prokes, A., Derbek, D.: UWB time domain channel
sounder. In: Proc. MAREW, Pardubice, Czech Republic (2015) 1–4
21. Zetik, R., Kmec, M., Sachs, J., Thom
¨
a, R.S.: Real-time MIMO channel sounder for emula-
tion of distributed ultrawideband systems. Int. J. Ant. Prop. 2014 (2014) 1–16
22. Blumenstein, J., Mikulasek, T., Marsalek, R., Prokes, A., , Zemen, T., Mecklenbrauker, C.:
In-vehicle mm-wave channel model and measurement. In: Proc. IEEE VTC, Vancouver,
Canada (2014) 1–6
23. Vychodil, J., Blumenstein, J., Mikulasek, T., Prokes, A., Derbek, D.: Measurement of in-
vehicle channel feasibility of ranging in UWB and MMW band. In: Proc. ICCVE, Vienna,
Austria (2014) 1–4
24. Gustafson, C., Haneda, K., Wyne, S., Tufvesson, F.: On mm-wave multipath clustering and
channel modeling. IEEE Trans. Ant. Prop. 62 (2014) 1445–55
25. Mecklenbrauker, C., Prokes, A., Blumenstein, J., Zemen, T.: Characterization of short range
intra-vehicle wireless links comparing ultrawideband 3-11 GHz and millimeter waves 55-65
GHz. In: Proc. IEEE IMS, Phoneix, Arizona, USA (2015) 1–4
26. Hodrick, R.J., Prescott, E.C.: Postwar US business cycles: an empirical investigation. Journal
of Money, credit, and Banking 29 (1997) 1–16
27. Muller, M.: WLAN 802.11p Measurements for Vehicle to Vehicle (V2V) DSRC. Application
note Rohde & Schwarz: 1 MA152 Oe (2009)
28. Kukolev, P., Chandra, A., Mikulasek, T., Prokes, A., Zemen, T., Mecklenbrauker, C.: In-
vehicle channel sounding in the 5.8 GHz band. EURASIP J. Wirel. Commun. Net. 2015
(2015) 1–9
26
EPS Angers 2015 2015 - European Project Space on Information and Communication Systems
26

29. Higgins, M.D., Green, R.J., Leeson, M.S.: Optical wireless for intravehicle communications:
a channel viability analysis. IEEE Trans. Veh. Tech. 61 (2012) 123–29
30. Kolmonen, V.M.: Propagation channel measurement system development and channel char-
acterization at 5.3 GHz. PhD Thesis, Aalto University School of Science and Technology,
Espoo, Finland (2010)
27
Intra Vehicular Wireless Channel Measurements
27
