
3D Single Point Imaging Technology for Tracking Multiple Fish
Mohammadmehdi Saberioon, Petr Cisar and Jan Urban
Laboratory of Image and Signal Processing, Institute of Complex Systems, Faculty of Fisheries and Protection of Waters,
University of South Bohemia in České Budějovice, Zámek 136, 37333, Nové Hrady, Czech Republic
Keywords: Fish Tracking, 3D Single Point Imaging, Kinect, Trajectory.
Abstract: Image based tracking like video tracking has shown potential in aquaculture behavioural studies in past
decade. Image based tracking is allowing to have higher spatial and temporal resolution in compared to most
conventional methods such as hand scoring, tagging and telemetry. They also permit to have more information
about the environment rather than other methods. Most studies about trajectory are based on tracking in two
dimensional (2D) environments; however, organisms are mostly included in three dimensional (3D)
environments which influence ecological interactions extensively. Furthermore, in 2D image analysis,
occlusion of fish is a frequent problem for analysis of fish tracking and ultimately their behaviour. Recently,
new hardware based on single point 3D imaging technology have been developed which can provide 3D
single points in real-time by combining a colour video camera, infrared video camera with an infrared
projector. The main objective of this study was to develop a multiple fish tracking system in 3D space based
on the current available 3D imaging technology. Developed system could accurately (98%) track multiple
Tilapia (Oreochromis niloticus) which was freely swimming in an aquarium. This study contributes to
feasibility of new sensors to monitor fish behaviours in 3D space.
1 INTRODUCTION
Aquatic organisms are very sensitive to alterations in
the aquatic environment and they respond to changes
with distinctive movement and behaviour (Little and
Finger, 1990; Mancera et al., 2008). Monitoring of
fish behaviour such as individual food intake and
swimming speed not only can provide useful
information for improving production management
(Oppedal et al., 2011; Brown et al., 2006), but also it
would help farmers to observe fish behaviour as a
welfare indicator (Zion, 2012). Fish behaviour
analysis can also be used for environmental risk
assessment, like examining presence of chemical
agents in water as an inexpensive and fast alternative
to laboratory analysis (Kane et al., 2004; Masud et al.,
2005; Xiao et al., 2015).
During past decade, machine vision system
(MVS) as an alternative to conventional method, has
been used for real-time and offline monitoring of fish
behaviours such as schooling and shoaling (Salierno
et al., 2007; Suzuki et al., 2003), novelty behaviours
(Stewart et al., 2012), abnormality behaviours (Beyan
and Fisher, 2013; Pinkiewicz et al., 2011), feeding
behaviours (Parsonage and Petrell, 2003; Lee et al.,
2013; Atoum et al., 2015) and respond behaviours to
stress which caused by high stocking density
(Papadakis et al., 2012) or hypoxic condition (Xu et
al., 2006). In other words, MVS can provide
automate, inexpensive, non-invasive and accurate
information about fish behavioural parameters
(Delcourt et al., 2012).
To date, a number of MVSs have been developed
for studying individual fish behaviours. For instance,
Kato et al., (2004) developed a system for quantifying
individual Zebrafish (Brachydanio rerio, Cyprinidae)
behaviours such as velocity, swimming distance,
trace map and turning directions. Stewart et al. (2012)
recorded individual fish behaviours in open filed test
arenas to understand the fish novelty behaviours.
Papadakis et al., (2012) developed low cost MVS to
analysis fish behaviours in tank. However, tracking
and monitoring multiple fish using MVS
automatically have also been studied. For instance,
Pinkiewicz et al., (2011) developed a system to record
and analysis multiple fish movement using Kalman
filter and data association techniques based on video
footage of salmon in sea cage. Mirat et al., (2013)
expanded a program called ZebraZoom to track
larvae’s Zebrafish movement. Perz-Escidero et al.,
Saberioon, M., Cisar, P. and Urban, J.
3D Single Point Imaging Technology for Tracking Multiple Fish.
DOI: 10.5220/0005634001150121
In Proceedings of the 9th International Joint Conference on Biomedical Engineering Systems and Technologies (BIOSTEC 2016) - Volume 4: BIOSIGNALS, pages 115-121
ISBN: 978-989-758-170-0
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
115

(2014) developed a visual system called idTracker for
tracking individuals, even siblings, in a group based
on finding fingerprint of each animal in a video
recording of a group. Lee et al., (2014) developed a
MVS based on particle filter algorithm for tracking
multiple fish in a single tank.
Most studies about trajectory are based on
tracking in two dimensional (2D) environment;
however, most organisms are included in three
dimensional (3D) environment, which influence
ecological interactions extensively (Pawar et al.,
2012). For instance, it would be difficult to recognize
some behaviours that contain vertical movements
(Horodysky et al., 2007). Moreover, occlusion is a
frequent problem for analysis of fish tracking and
ultimately their behaviour where 2D images are using
for analysis. Therefore, tracking animal in their 3D
environment is more desired as a promised method in
animal behavioural studies.
Tracking system in 3D has studied using different
approaches such as light field video cameras which
composite optics are used to simultaneously capture
images focused at different distance from lens,
therefore allowing to reconstruct scene in 3D
(Matsumoto et al., 2013), or single image of
reflections or shadows from surface of a 3D surface
such as spherical mirror (Kanbara et al., 2006; Chen
et al., 2011). Nevertheless, multiple cameras are
usually employed to reconstruct 3D scene for tracking
objects. For example, Spitzen et al., (2013) used two
monochrome couple- charged device (CCD) video
cameras to study in-flight behaviour of individual
malaria mosquito to human odor and heat in 3D
space. Cachat et al., (2011) reconstructed 3D
environment using images from two video cameras,
and manually recorded position of individual
Zebrafish to understand neurophenotyping of adult
Zebrafish in 3D environment. Some other researchers
also tried to track multiple objects using multiple
cameras. Viscido et al., (2004) used stereo vision
system to track 4 to 6 group of giant danios (Danio
aequipinnatus). Veeraraghavan et al., (2006)
proposed a method based on motion information to
track multiple bees using two video cameras. Wu et
al., (2011) developed an algorithm by solving three
linear assignment problems for tracking multiple fruit
fly using two video cameras automatically.
Synchronizing multiple cameras usually need
different hardware and complicated software; they
also need more handlings, which may affect animal
behaviours (Dell et al., 2014). Besides, spatial
resolution of images are dramatically drops when
objects move away from sensors (Gokturk et al.,
2004).
Recently, new hardware based on single point 3D
imaging technology (e.g. Microsoft Kinect or Asus’s
Xtion Pro) have been developed. This hardware can
provide 3D single points in real-time by combining a
colour video camera, infrared video camera with an
infrared projector to create defined infrared laser light
pattern which depth information can be obtained.
These new hardware practically provide possibility to
develop an affordable tracking system to study
multiple fish in real-time. So, the main objective of
this study was to develop a multiple fish tracking
system in 3D space based on the aforementioned
sensor. To the best of our knowledge, no research has
been done on examining this technology for fish
tracking. The introduced system was able to resolve
the occlusion problem and track each fish separately
even the siblings in real-time 3D space.
2 MATERIALS AND METHODS
2.1 Experimental Setup
The experiment took place at Laboratory of Signal
and Image Processing of Institute of complex
systems, FFPW, University of South Bohemia, Czech
Republic. Tilapia (Oreochromis niloticus) was
selected for demonstrative purpose in this study.
Tilapia has been used in many studies as the
experimental model for behavioural studies because
of its well characterized responds to stress (Moreira
and Volpato, 2004). Standard length (SL), between
the front head extremity and the insertion of the tail
fin, and body height (BH), in front of the first ray of
the dorsal fin, as morphometric parameters were
measured. Fish selected for this study had 8.6, 8.4, 8,
8 cm SL and 2.6, 2.5, 2.5, 2.4 cm BH respectively.
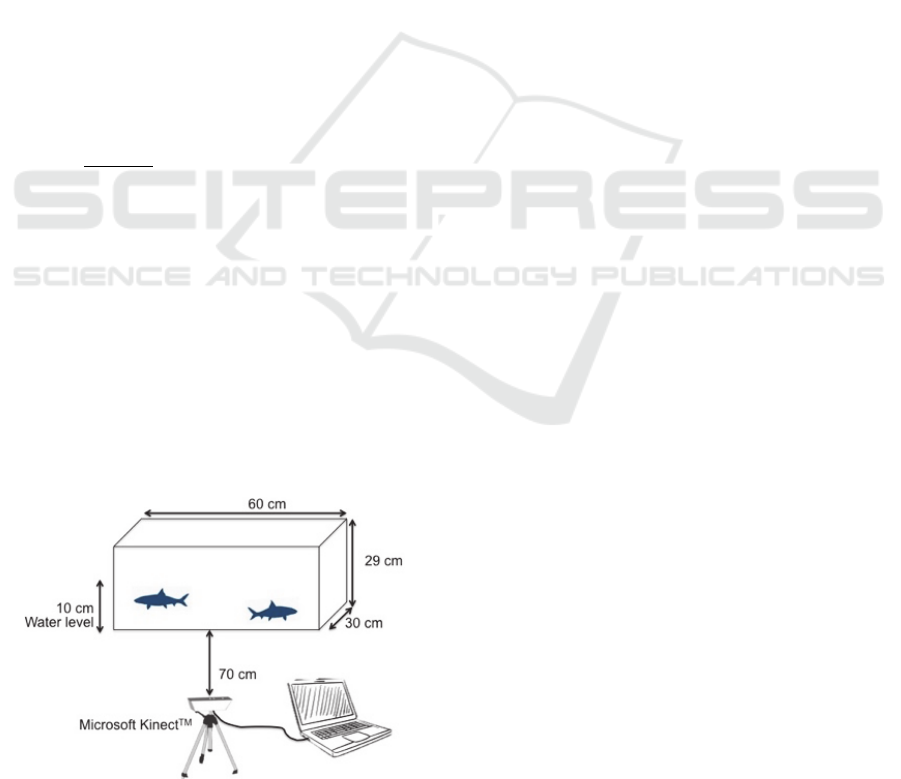
The glass aquarium (60 cm ×30 cm ×29 cm, 10 cm
water depth) with transparent sides was used for
recoding fish activities. In order to avoid water
surface movements that could create light reflection,
Microsoft Kinect v1 was placed under the tank from
a stationary (70 cm) in centre of the aquarium and
vertical position, which sensor was faced to the
aquarium. This distance was selected to maintain the
most field of view (FoV) of Microsoft Kinect v1,
which is 43° vertically and 57° horizontally and
increase the depth resolution (Khoshelham and
Elberink, 2012).
Tilapia is changing its skin colour quickly based
on ambient colour in background, which causes low
contrast between fish and background. Therefore, in
order to have high contrast between fish and
background for better post processing such as
BIOSIGNALS 2016 - 9th International Conference on Bio-inspired Systems and Signal Processing
116
segmentation, Blue Bristol board was used as
background (Xu et al., 2006).
Video was recorded for 30 minutes using software
which has been developed especially for this study by
authors with maximum sample rates of 10 frames per
seconds (fps) and then converted to image sequence
for further processing. Four 30-minute video
sequences that recorded one, two, three and four
individuals were totally prepared. The Experimental
aquarium was indirectly lit by two lamps, which
provide low light intensity.
RGB Images from the Microsoft Kinect v1 were
recorded in portable network graphics (PNG) format
with spatial resolution of 480×640 pixel. Images have
three components (namely red, green and blue) with
each colour comprising 256 graduations. Depth raw
data were also recorded in 11-bit format resolution.
Figure 1 shows the schematic of recording setup. The
depth images are constructed by triangulation from IR
image and the projector and carried by IR image. In
other words, a 3D coordinate point of depth images
(X
3D
) is constructed from the measurement of [x, y,
z] in depth image as below, which has been described
by Smisek et al., (2011):
1
1
,
(1)
Where K
IR
is Infrared camera calibration, k
IR
is
distortion parameter of the IR camera, c
1
and c
0
are
parameters of the model, dis is distortion, u
0
and v
0
are mean value of shift position from IR to Depth
camera (u
0
= 3.0 and v
0
= 2.9), and are projected to
the RGB image as below:
u
RGB
= K
RGB
dis (R
RGB
(X
IR
– C
RGB
), k
RGB
) (2)
where dis is distortion function, k
RGB
is distortion
parameter of the RGB camera. R
RGB
is the rotation
matrix, K
RGB
is calibration matrix and C
RGB
is the
centre of RGB camera.
Figure 1: Schematic of single point 3D multiple tracking
system.
2.2 Pre-processing
Microsoft Kinect’s RGB images were converted to
Hue, Saturation, and Value (HSV) colour model
using method described by Tang et al., (2003). HSV
colour model provides immunity to illumination
condition. Once after the conversion, segmentation
process was performed to remove unwanted pixels.
Moreover, some morphological operations such as
erosion and dilation have been performed to eliminate
the segmentation noises. All of the images were
processed using Matlab Image processing toolbox.
2.3 Image Processing
Real world X and Y of centroid of multiple tilapia
were obtained using the method proposed by Pérez-
Escudero et al., (2014). The method is a multi-
tracking algorithm based on extracting of
characteristic fingerprint from each object in a video
recording of a group, from RGB images. First, a set
of the reference images was extracted, which fish
were separated. Then, algorithm compared reference
images with images, where fish were connected. To
obtain clear fingerprint for each fish, intensities of
two pixels (I
1
, I
2
) separated in d distance, were
determined in each frame, and then were used to
identify each fish in all frames. Moreover, algorithm
aggregated the information of all images that belong
to the same individual, while it moved without
crossing with any other individual. This will improve
the probability of correct identification of each
individual. Depth information (z-value) was also
extracted from Kinects’ depth image; first converting
resolution of images from 11 bit to 8 bit, then
transformed to 3D point cloud using Matlab image
processing toolbox. Finally, fish trajectories, were
extracted based on 3D location of each fish in each
frame.
2.4 Accuracy Assessment
The proposed system is acquiring the trajectory
automatically, thus it is important to assess the
accuracy of the result respectively. Accuracy and
precision of the system was evaluated by comparing
results with ground truth. Human inspection was used
to evaluate 2D track produced by using finger
printing method frame by frame, and then associating
the 3D position between each consecutive frames to
form complete trajectory.
3D Single Point Imaging Technology for Tracking Multiple Fish
117
3 RESULTS AND DISCUSSION
The proposed system was applied to four 30-minute
video sequences that were recorded one, two, three
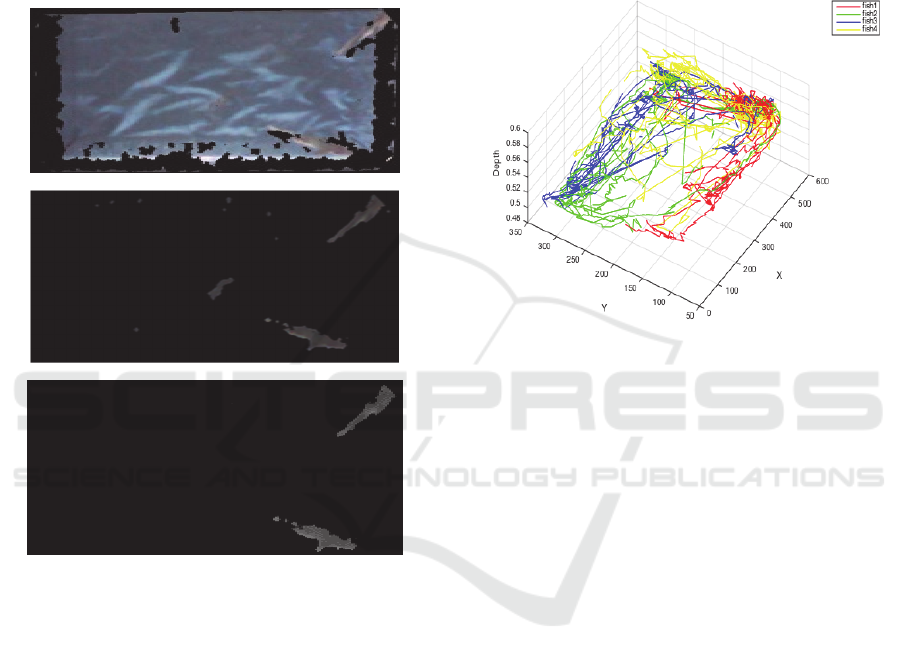
and four individuals. Figure 2 shows the original and
pre-processing image frame. Fish were successfully
segmented in most frames from the background. Any
remained noise pixels, which remained, were
removed using morphological operations.
(a)
(b)
(c)
Figure 2: Experiment images and processing results, (a)
original image from Microsoft Kinect in RGB bands, (b)
segmented image and (c) segmented image after correction.
Before constructing trajectory in 3D space,
initially we first tracked individual fishes in 2D space
in each frame using Pérez-Escudero et al., (2014)
proposed method. Depth information (z-value) from
each individual was extracted after tracking fish in 2D
space using both systems. Figure 3 shows the
trajectory of four fish in 3D space using both sensors.
Proposed system was successfully tracked
multiple fish with 98% accuracy. The obtained 3D
coordinate estimation accuracy was similar to the
accuracy that could be obtained from stereo vision
type systems as convention system for determining
3D coordinates (Torisawa et al., 2011). However,
decreasing in accuracy of the proposed tracking
system is expected with increasing in number of
tracking objects. The results of this study indicated
that the single point 3D imaging technology could be
employed for fast, accurate, inexpensive and non-
invasive multiple fish tracking even under sever
occlusion. The proposed system added length of third
dimension (z-value) for not only improving the
precision but also for shedding light on animal
activity in 3D environment which were the limitation
for previous systems (Delcourt et al., 2006).
Figure 3: 3D Trajectory acquisition results of four fish from
a 10-minute video using in 3D.
Single point 3D imaging offers information with
less computational and power consumption, which
make it ideal technology for monitoring in real-time
with less handling process. However, current
available single point 3D imaging hardware have
some limitations which make them difficult to use in
commercial scale. For instance, Khoshelham and
Elberink (2012) pointed out for tracking and mapping
object(s) using Kinect with high resolution, the data
should be acquired within 1-3 m distance to the
sensor, which makes remote sensing application of
sensor to 3 meter. The number of animals which can
be tracked using Kinect is also limited to how many
fish will be fitted in the FoV of the camera (Schramm,
2010).
4 CONCLUSIONS
This study developed an automatic system for
accurate tracking of multiple fish in 3D environment
even under severe occlusion. The system was based
on fingerprinting that track individual fish in 2D
space and depth information which was provided by
depth sensor in Microsoft Kinect. The results of the
system evaluation showed that the introduced system
was able to track multiple fish in an aquarium even
BIOSIGNALS 2016 - 9th International Conference on Bio-inspired Systems and Signal Processing
118

under sever occlusion successfully. However, current
available 3D single point imaging system has some
limitations but it would be expected to be used in near
future as an ideal sensor for monitoring and recording
animal behaviour in 3D space in real-time when study
is conducted in small environments such as
aquariums.
Proposed system could be extended further for
studying fish behaviours by evaluating more states
such as speed and inter-individual spacing. It can also
be used to study individual fish behaviour in 3D space
in a group which would provide useful information
about fish schooling. It would be necessary to
understand the maximum number of fish which can
be tracked using the introduced system, which future
research may need to answer this question.
ACKNOWLEDGEMENTS
The authors acknowledge the financial support of the
Ministry of Education, Youth and Sport of the Czech
Republic- projects ‘CENAKVA’ (No.
CZ.1.05/2.1.00/01.0024),'CENAKVA II' (No.
LO1205 under the NPU I program).
REFERENCES
Atoum, Y., Srivastava, S., and Xiaoming Liu. (2015).
Automatic Feeding Control for Dense Aquaculture Fish
Tanks. IEEE Signal Processing Letters, 22(8), 1089–
1093.
Beyan, C., and Fisher, R. B. (2013). Detecting abnormal
fish trajectories using clustered and labeled data (pp.
1476–1480). Presented at the 20th IEEE International
Conference on Image Processing (ICIP), IEEE.
http://doi.org/10.1109/ICIP.2013.6738303.
Brown, G. E., Rive, A. C., Ferrari, M. C. O., and Chivers,
D. P. (2006). The dynamic nature of antipredator
behavior: prey fish integrate threat-sensitive
antipredator responses within background levels of
predation risk. Behavioral Ecology and Sociobiology,
61(1), 9–16. http://doi.org/10.1007/s00265-006-0232-
y.
Cachat, J., Stewart, A., Utterback, E., Hart, P., Gaikwad, S.,
Wong, K., et al. (2011). Three-Dimensional
Neurophenotyping of Adult Zebrafish Behaviour. PLoS
ONE, 6(3), e17597. http://doi.org/10.1371/journal.
pone.0017597.
Chen, Z., Wong, K.-Y. K., Liu, M., and Schnieders, D.
(2011). Single-view reconstruction from an unknown
spherical mirror (pp. 2677–2680). Presented at the 18th
IEEE International Conference on Image Processing
(ICIP 2011), IEEE. http://doi.org/10.1109/ICIP.
2011.6116219.
Delcourt, J., Denoël, M., Ylieff, M., and Poncin, P. (2012).
Video multitracking of fish behaviour: a synthesis and
future perspectives. Fish and Fisheries, 14(2), 186–204.
http://doi.org/10.1111/j.1467-2979.2012.00462.x.
Delcourt, J., Beco, C., Ylieff, M. Y., and Caps, H. (2006).
Comparing the EthoVision 2.3 system and a new
computerized multitracking prototype system to
measure the swimming behaviour in fry fish. Behaviour
Research, 38(4), 704–710. http://doi.org/10.3758/
bf03193904.
Dell, A. I., Bender, J. A., Branson, K., Couzin, I. D., de
Polavieja, G. G., Noldus, L. P. J. J., Pérez-Escudero, A.,
Perona, P., Straw, A.D., Wikelski, M., Brose, U.
(2014). Automated image-based tracking and its
application in ecology. Trends in Ecology and
Evolution, 29(7), 417–428.
http://doi.org/10.1016/j.tree.2014.05.004.
Gokturk, S. B., Yalcin, H., and Bamji, C. (2004). A Time-
Of-Flight Depth Sensor - System Description, Issues
and Solutions (pp. 35–35). Presented at the Conference
on Computer Vision and Pattern Recognition
Workshop, 2004. CVPRW '04., IEEE.
http://doi.org/10.1109/CVPR.2004.17.
Horodysky, A. Z., Kerstetter, D. W., Latour, R. J., and
Graves, J. E. (2007). Habitat utilization and vertical
movements of white marlin (Tetrapturus albidus)
released from commercial and recreational fishing
gears in the western North Atlantic Ocean: inferences
from short duration pop-up archival satellite tags.
Fisheries Oceanography, 16(3), 240–256.
http://doi.org/10.1111/j.1365-2419.2007.00419.x.
Kanbara, M., Ukita, N., Kidode, M., and Yokoya, N.
(2006). 3D Scene Reconstruction from Reflection
Images in a Spherical Mirror (Vol. 4, pp. 874–879).
Presented at the 18th International Conference on
Pattern Recognition (ICPR'06), IEEE.
http://doi.org/10.1109/ICPR.2006.32.
Kane, A. S., Salierno, J. D., Gipson, G. T., Molteno, T. C.
A., and Hunter, C. (2004). A video-based movement
analysis system to quantify behavioural stress
responses of fish. Water Research, 38(18), 3993–4001.
http://doi.org/10.1016/j.watres.2004.06.028.
Kato, S., Nakagawa, T., Ohkawa, M., Muramoto, K.,
Oyama, O., Watanabe, A., Nakashima, H., Nemoto, T.,
Sugitani, K. (2004). A computer image processing
system for quantification of zebrafish behaviour.
Journal of Neuroscience Methods, 134(1), 1–7.
http://doi.org/10.1016/j.jneumeth.2003.09.028.
Khoshelham, K., and Elberink, S. O. (2012). Accuracy and
resolution of Kinect depth data for indoor mapping
applications. Sensors, 12(2), 1437–1454.
http://doi.org/10.3390/s120201437.
Lee, J.-V., Loo, J.-L., Chuah, Y.-D., Tang, P.-Y., Tan, Y.-
C., and Goh, W. J. (2013). The Use of Vision in a
Sustainable Aquaculture Feeding System. Research
Journal of Applied Science, Engineering and
Technology, 6(19), 3658–3669.
Lee, W. P., Osman, M. A., Talib, A. Z., Ogier, J.-M., and
Yahya, K. (2014). Tracking Multiple Fish in a Single
Tank Using an Improved Particle Filter. In Advances in
3D Single Point Imaging Technology for Tracking Multiple Fish
119

Computer Science and its Applications (Vol. 279, pp.
799–804). Berlin, Heidelberg: Springer Berlin
Heidelberg. http://doi.org/10.1007/978-3-642-41674-
3_114.
Little, E. E., and Finger, S. E. (1990). Swimming behaviour
as an indicator of sublethal toxicity in fish.
Environmental Toxicology and Chemistry, 9(1), 13–19.
http://doi.org/10.1002/etc.5620090103.
Mancera, J. M., Vargas-Chacoff, L., García-López, A.,
Kleszczyńska, A., Kalamarz, H., Martínez-Rodríguez,
G., and Kulczykowska, E. (2008). High density and
food deprivation affect arginine vasotocin, isotocin and
melatonin in gilthead sea bream (Sparus auratus).
Comparative Biochemistry and Physiology Part a:
Molecular and Integrative Physiology, 149(1), 92–97.
http://doi.org/10.1016/j.cbpa.2007.10.016.
Masud, S., Singh, I. J., and Ram, R. N. (2005). Behavioural
and hematological responses of Cyprinus carpio
exposed to mercurial chloride. Journal of
Environmental Biology / Academy of Environmental
Biology, India, 26(2 Suppl), 393–397.
Matsumoto, J., Urakawa, S., Takamura, Y., Malcher-Lopes,
R., Hori, E., Tomaz, C., et al. (2013). A 3D-Video-
Based Computerized Analysis of Social and Sexual
Interactions in Rats. PLoS ONE, 8(10), e78460.
http://doi.org/10.1371/journal.pone.0078460.
Mirat, O., Sternberg, J. R., Severi, K. E., & Wyart, C.
(2013). ZebraZoom: an automated program for high-
throughput behavioral analysis and categorization.
Frontiers in Neural Circuits, 7, 1–12.
http://doi.org/10.3389/fncir.2013.00107.
Moreira, P. S. A., and Volpato, G. L. (2004). Conditioning
of stress in Nile tilapia. Journal of Fish Biology, 64(4),
961–969. http://doi.org/10.1111/j.1095-8649.2004.
00362.x.
Oppedal, F., Dempster, T., and Stien, L. H. (2011).
Environmental drivers of Atlantic salmon behaviour in
sea-cages: A review. Aquaculture, 311(1-4), 1–18.
http://doi.org/10.1016/j.aquaculture.2010.11.020.
Papadakis, V. M., Papadakis, I. E., Lamprianidou, F.,
Glaropoulos, A., and Kentouri, M. (2012). A computer-
vision system and methodology for the analysis of fish
behaviour. Aquacultural Engineering, 46, 53–59.
http://doi.org/10.1016/j.aquaeng.2011.11.002.
Parsonage, K. D., and Petrell, R. J. (2003). Accuracy of a
machine-vision pellet detection system. Aquacultural
Engineering, 29(3-4), 109–123. http://doi.org/10.1016/
S0144-8609(03)00049-9.
Pawar, S., Dell, A. I., and Savage, V. M. (2012).
Dimensionality of consumer search space drives
trophic interaction strengths. Nature, 486(7404), 485–
489. http://doi.org/10.1038/nature11131.
Pérez-Escudero, A., Vicente-Page, J., Hinz, R. C., Arganda,
S., and de Polavieja, G. G. (2014). idTracker: tracking
individuals in a group by automatic identification of
unmarked animals. Nature Methods, 11(7), 743–748.
http://doi.org/10.1038/nmeth.2994.
Pinkiewicz, T. H., Purser, G. J., and Williams, R. N. (2011).
A computer vision system to analyse the swimming
behaviour of farmed fish in commercial aquaculture
facilities: A case study using cage-held Atlantic
salmon. Aquacultural Engineering, 45(1), 20–27.
http://doi.org/10.1016/j.aquaeng.2011.05.002.
Salierno, J. D., Gipson, G. T., and Kane, A. S. (2007).
Quantitative movement analysis of social behaviour in
mummichog, Fundulus heteroclitus. Journal of
Ethology, 26(1), 35–42. http://doi.org/10.1007/s10164-
006-0027-7.
Schramm, M., (2010) Kinect: the company behind the tech
explain how it works. http://www.engadget.com/2010/
06/19/kinect-how-it-works-from-the-company-behind-
the-tech/. Retrieved 11 April 2015.
Smisek, J., Jancosek, M., and Pajdla, T. (2011). 3D with
Kinect (pp. 1154–1160). Presented at the IEEE
International Conference on Computer Vision
Workshops (ICCV Workshops), IEEE.
http://doi.org/10.1109/ICCVW.2011.6130380.
Spitzen, J., Spoor, C. W., Grieco, F., Braak, ter, C.,
Beeuwkes, J., van Brugge, S. P., et al. (2013). A 3D
Analysis of Flight Behaviour of Anopheles gambiae
sensu stricto Malaria Mosquitoes in Response to
Human Odor and Heat. PLoS ONE, 8(5), e62995.
http://doi.org/10.1371/journal.pone.0062995.
Stewart, A. M., Gaikwad, S., Kyzar, E., and Kalueff, A. V.
(2012). Understanding spatio-temporal strategies of
adult zebrafish exploration in the open field test. Brain
Research, 1451, 44–52. http://doi.org/10.1016/
j.brainres.2012.02.064.
Suzuki, K., Takagi, T., and Hiraishi, T. (2003). Video
analysis of fish schooling behaviour in finite space
using a mathematical model. Fisheries Research, 60(1),
3–10. http://doi.org/10.1016/S0165-7836(02)00081-4.
Tang, L., Tian, L., and Steward, B. L. (2003). Classification
of broadleaf and grass weeds using gabor wavelets and
an artificial neural network. Transactions of the ASAE,
46(4), 1247–1254. http://doi.org/10.13031/
2013.13944.
Torisawa, S., Kadota, M., Komeyama, K., Suzuki, K., and
Takagi, T. (2011). A digital stereo-video camera system
for three-dimensional monitoring of free-swimming
Pacific bluefin tuna, Thunnus orientalis, cultured in a
net cage. Aquatic Living Resources, 24(2), 107–112.
http://doi.org/10.1051/alr/2011133.
Veeraraghavan, A., Srinivasan, M., Chellappa, R., Baird,
E., and Lamont, R. (2006). Motion Based
Correspondence for 3D Tracking of Multiple Dim
Objects (Vol. 2, pp. II–669–II–672). Presented at the
2006 IEEE International Conference on Acoustics
Speed and Signal Processing, IEEE.
http://doi.org/10.1109/ICASSP.2006.1660431.
Viscido, S. V., Parrish, J. K., and Grünbaum, D. (2004).
Individual behaviour and emergent properties of fish
schools: a comparison of observation and theory.
Marine Ecology Progress Series, 273, 239–249.
http://doi.org/10.3354/meps273239.
Wu, H. S., Zhao, Q., Zou, D., and Chen, Y. Q. (2011).
Automated 3D trajectory measuring of large numbers
of moving particles. Optics Express, 19(8), 7646–7663.
http://doi.org/10.1364/OE.19.007646.
BIOSIGNALS 2016 - 9th International Conference on Bio-inspired Systems and Signal Processing
120

Xiao, G., Feng, M., Cheng, Z., Zhao, M., Mao, J., and
Mirowski, L. (2015). Water quality monitoring using
abnormal tail-beat frequency of crucian carp.
Ecotoxicology and Environmental Safety, 111, 185–
191. http://doi.org/10.1016/j.ecoenv.2014.09.028.
Xu, J., Liu, Y., Cui, S., and Miao, X. (2006). Behavioural
responses of tilapia (Oreochromis niloticus) to acute
fluctuations in dissolved oxygen levels as monitored by
computer vision. Aquacultural Engineering, 35(3),
207–217. http://doi.org/10.1016/j.aquaeng.2006.02.0
04.
Zion, B. (2012). The use of computer vision technologies
in aquaculture-A review. Computers and Electronics in
Agriculture, 88(C), 125–132. http://doi.org/10.1016/
j.compag.2012.07.010.
3D Single Point Imaging Technology for Tracking Multiple Fish
121
