
Detecting Fine-grained Sitting Affordances with Fuzzy Sets
Viktor Seib, Malte Knauf and Dietrich Paulus
Active Vision Group (AGAS), University of Koblenz-Landau, Universit
¨
atsstr. 1, 56070, Koblenz, Germany
Keywords:
Affordances, Fine-grained Affordances, Visual Affordance Detection, Object Classification, Fuzzy Sets.
Abstract:
Recently, object affordances have moved into the focus of researchers in computer vision. Affordances de-
scribe how an object can be used by a specific agent. This additional information on the purpose of an object is
used to augment the classification process. With the herein proposed approach we aim at bringing affordances
and object classification closer together by proposing fine-grained affordances. We present an algorithm that
detects fine-grained sitting affordances in point clouds by iteratively transforming a human model into the
scene. This approach enables us to distinguish object functionality on a finer-grained scale, thus more closely
resembling the different purposes of similar objects. For instance, traditional methods suggest that a stool,
chair and armchair all afford sitting. This is also true for our approach, but additionally we distinguish sitting
without backrest, with backrest and with armrests. This fine-grained affordance definition closely resembles
individual types of sitting and better reflects the purposes of different chairs. We experimentally evaluate our
approach and provide fine-grained affordance annotations in a dataset from our lab.
1 INTRODUCTION
Reasoning about an object’s purpose is an important
area in today’s research on robotics. While object
classification is a widely studied topic no solution ex-
ists yet as how to reflect the multitude of different ob-
ject categories and relate them to possible actions of
a robot or a person. Indeed, object classification ap-
proaches struggle with classes exhibiting large intra
class shape variations. On the other hand, objects be-
longing to the same class share a certain functionality.
At this point, affordances (Gibson, 1986) seem to pro-
vide a beneficial solution. While shape features are
often acquired locally (i.e. around salient points) and
might therefore be misleading, detecting a function-
ality of an object facilitates categorization. Addition-
ally, recognizing affordances of objects instead of the
object classes, allows objects and tools to be applied
even without the precise knowledge of the class the
object belongs to. Even objects of different classes
can be applied according to a certain affordance re-
quired by the agent. For example, if an agent (e. g.
a robot) needs to hammer, it would pick a heavy ob-
ject providing enough space for grasping and a hard
surface to hit on another object. This works without
knowing the category hammer or having a hammer
available by e. g. using a stone instead.
Approaches to detect and learn affordances in
robotics often propose to infer affordance by imi-
tation from observing humans (Stark et al., 2008),
(Kjellstr
¨
om et al., 2011), (Lopes et al., 2007), or
to learn affordances through interaction (Montesano
et al., 2008), (Ridge et al., 2009). Other approaches
focus on augmenting the performance of object recog-
nition methods by recognizing affordances (Hinkle
and Olson, 2013). In their approach, Castellini et
al. (Castellini et al., 2011) record kinematic features
of a hand while grasping objects. They show that
visual features together with kinematic information
help augmenting the object recognition. In contrast
to these approaches using interactive affordances we
do not record kinematic data of an agent, neither do
we detect affordances by interaction. In contrast, vi-
sual perception is mostly common in today’s robots
and it is thus plausible to rely on that data. Thus, the
approach proposed in this paper relies on visual data
only.
In our approach we employ the observer’s view on
affordances as introduced by S¸ahin et al. (S¸ahin et al.,
2007). While the environment is being observed by
a robot equipped with certain sensors, the system is
looking for affordances that afford actions to a prede-
fined model. In our case this predefined model is an
anthropomorphic agent representing a humanoid. In
recent work (Jiang and Saxena, 2013), (Grabner et al.,
2011) this observer’s view is often referred to as hal-
lucinating interactions.
In the proposed method we focus on the comple-
Seib, V., Knauf, M. and Paulus, D.
Detecting Fine-grained Sitting Affordances with Fuzzy Sets.
DOI: 10.5220/0005638802890298
In Proceedings of the 11th Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2016) - Volume 4: VISAPP, pages 289-298
ISBN: 978-989-758-175-5
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
289

Figure 1: Example furniture objects corresponding to the
different fine-grained affordances detected by the presented
approach. Top row: a stool representing the sitting without
backrest affordance and two chairs representing the sitting
with backrest affordance. Bottom row: three chairs rep-
resenting the sitting with backrest and sitting with armrest
affordances. Additionally, the rightmost chair also supports
the sitting with headrest affordance.
mentary nature of an agent and its environment. We
use indoor or home environments that are considered
as artificial environments specifically designed to suit
the needs of humans. Therefore, the complementary
agent to the investigated environment is an anthropo-
morphic, i. e. human, body. Thus, for the purpose of
this work affordances shall be informally defined as
action possibilities that the environment offers to an
anthropomorphic agent.
Related approaches in the literature (Hinkle and
Olson, 2013), (Sun et al., 2010), (Hermans et al.,
2011) distinguish affordances on a coarse scale. The
considered affordances often include sitting (chairs),
support for objects (tables) and liquid containment
(cups). We propose looking closely at the individual
affordances and distinguishing their functional differ-
ences an a fine-grained scale. We already introduced
the concept of fine-grained affordances in (Seib et al.,
2015) to closely resemble the functional differences
of related objects. Although good results could be
obtained, our previous work was a proof-of-concept
with several limitations. The algorithm could be used
to distinguish only 2 fine-grained affordances. Addi-
tionally, it relied on planes segmented from the scene
that had to be oriented in a certain way. Further, with-
out a fuzzy set formulation it relied on fixed values
for important thresholds.
In the presented work, we concentrate on fine-
grained affordances derived from the affordance sit-
ting. We present a new algorithm for fine-grained af-
fordance detection that exploits fuzzy sets and differ-
entiates between 4 typical functionality characteris-
tics of the sitting affordance. We divide the coarse
affordance sitting into the fine-grained affordances
sitting without backrest, sitting with backrest, sitting
with armrest and sitting with headrest, whenever the
sitting functionality is supported by additional envi-
ronmental properties that can be exploited by the con-
sidered agent. Further, the presented approach no
longer relies on features like segmented planes from
the environment, but rather uses the whole input data
for processing.
A system that is able to find affordances either
encounters only those objects that were specifically
designed to support the affordance in question or
environmental constellations that afford the desired
action. Our algorithm takes point clouds from a
RGB-D camera as input. The input data is directly
searched for affordances (and thus functionalities)
without prior object segmentation. In the core of
the algorithm, the agent model is transformed and
checked for collisions with the environment. Specific
goal configurations of the agent model represent dif-
ferent types of fine-grained affordances. The encoun-
tered affordances are segmented from the input point
cloud. This segmentation can serve as an initial seg-
mentation for a subsequent object classification step
(not further explored in this work). Since the found
affordances (especially on a fine-grained scale) pro-
vide many hints on the possible object class, cate-
gorization can be performed with fewer training ob-
jects or simpler object models. The presented fine-
grained affordances correspond to objects such as a
stool, chair, armchair and a chair with head support
(Figure 1).
Specifically, an affordance-based categorization
system can be exploited as outlined in the following.
Affordances enable the detection of sittable objects
even without knowing object classes as stool, chair
or couch. Following the idea of fine-grained affor-
dances, a stool standing close to a wall can even pro-
vide both affordances: sitting with and without back-
rest (in the former case the back is supported by the
wall). This intuitively corresponds to the way a hu-
man would utilize an object to obtain different func-
tionality.
The remainder of this work is structured as de-
scribed in the following. Related work on affordances
in robotics is presented in Section 2. Section 3 intro-
duces the model definitions applied in our algorithm
and Section 4 explains our approach for fine-grained
affordance detection in detail. The proposed algo-
rithm is evaluated in Section 5. Finally, a discussion is
VISAPP 2016 - International Conference on Computer Vision Theory and Applications
290

given in Section 6 and Section 7 concludes the paper
and gives an outlook to our future work.
2 RELATED WORK
Affordances provide a new way to look at objects.
Rather than determining the object’s category by
learning shapes of object classes, the visual informa-
tion is used to detect the object’s functionality. For
example, objects of the class chair have a large in-
tra class shape variation, imposing great challenges
for object recognition systems. At the same time, all
instances of class chair share the same functionality
offering opportunities to augment object recognition
systems.
Hinkle and Olson (Hinkle and Olson, 2013) use
physical simulation to predict object functionality.
The simulation consists of spheres falling onto an ob-
ject from above. A feature vector is extracted from
each object depending on where and how the spheres
come to rest. The objects are classified as cup-like,
table-like or sitable.
Research especially focusing on sitting affor-
dances has been conducted over the past years. Of-
fice furniture recognition (chairs and tables) is pre-
sented by W
¨
unstel and Moratz (W
¨
unstel and Moratz,
2004). Affordances are used to derive the spatial ar-
rangement of the object’s components. Objects are
modeled as graphs, where nodes represent the object’s
parts and edges the spatial distances of those parts.
The 3D data is cut into three horizontal slices and
within each slice 2D segmentation is performed. The
segmentation results are classified as object parts and
matched to the object models. W
¨
unstel and Moratz’
approach detects sitting possibilities also on objects
that do not belong to the class chair, but intuitively
would serve a human for sitting. Unlike the approach
of W
¨
unstel and Moratz, we encode the spatial infor-
mation needed for affordance detection in an anthro-
pomorphic agent model and affordance models, rather
than creating explicit object models.
Approaches more similar to the one proposed in
this paper use simulated interaction of an agent and
the environment. Bar-Aviv and Rivlin (Bar-Aviv and
Rivlin, 2006) use an embodied agent to classify sit-
table objects. Starting with an initial agent pose, the
compatibility of different semi-functional agent poses
with the object is tested. For each object hypothesis
and agent pose a score is computed and most probable
poses are further refined. The object is assigned the
label of the hypothesis with the highest score. Con-
trary to Bar-Aviv and Rivlin (Bar-Aviv and Rivlin,
2006) who also use an embodied agent, our method
operates directly on the whole input data. We do not
need to segment the object prior to affordance detec-
tion. In our case, the segmented part of the scene is a
result of the detected affordances on the input data.
Especially in design theory approaches of hier-
archical affordance modeling were proposed (Maier
et al., 2007), (Maier et al., 2009). Their goal is to
divide objects into different functional parts that rep-
resent different affordances. This allows a designer
to identify desired and undesired affordances in early
stages of product design. Note however that this hier-
archical affordance modeling is conceptually different
from the fine-grained affordances applied in this pa-
per. We do not separate objects in different parts with
different affordances. Rather, our object independent
approach separates an affordance (in this case the sit-
ting affordance) into different sub-affordances on a
fine-grained scale.
More recently, Grabner et al. (Grabner et al.,
2011) proposed a method that learns sitting poses of
a human agent to detect sitting affordances in scenes
to classify objects. For training, key poses of a sit-
ting person need to be placed manually on each exam-
ple training object. In detecting chairs, their approach
achieves superior results over methods that use shape
features only. However, as pointed out by Grabner et
al. their approach has difficulties in detecting stools,
since they were not present in the training data. Con-
sequently, the approach of Grabner et al. does not
allow to detect affordances per se, but rather affor-
dances of trained object class examples.
In the present paper we follow a different ap-
proach. Our goal is to directly detect sitting affor-
dances in input data, independently of any possibly
present object classes. Further, if a sitting affordance
is detected, it will be categorized on a fine-grained
scale according to the characteristics of the input data
at the position where the affordance was found. Con-
sequently, our approach does not rely on examples
of sitting furniture, but only on the anthropomorphic
agent model encoding (in our case) comfortable sit-
ting positions. Our fuzzy function formulation en-
codes expert knowledge to connect the input data with
the desired functionality with respect to the given
agent model. Therefore, sitting affordances are de-
tected on the data as it is, independently of the pres-
ence of actual object classes. Additionally and similar
to Grabner et al., our approach suggests a pose how
the detected object can be used by the agent.
Note that our approach is ignorant of any object
categories. However, our fine-grained affordance for-
mulation allows for a more precise object categoriza-
tion as a consequence of affordance detection. Due
to the fine-grained scale on which affordances are de-
Detecting Fine-grained Sitting Affordances with Fuzzy Sets
291

tected, object categories can be easily linked to the
detection result (e.g. if a backrest could be detected or
not). Our approach thus suggest as which kind of ob-
ject the detected object exhibiting the affordance can
be used. However, in this paper we concentrate on
introducing the concept of fine-grained affordances.
The detailed analysis of detected objects and their
classification is left for future work.
3 MODEL DEFINITIONS
Usually, affordances are defined as relations between
an agent and its environment (Gibson, 1986), (S¸ ahin
et al., 2007), (Chemero and Turvey, 2007). Since
these two entities are crucial for affordances, we start
with their definitions. Then, a definition of fine-
grained affordances is provided.
3.1 Agent and Environment
Our anthropomorphic agent model is defined as a di-
rected acyclic graph H representing a human body
(Figure 2). In this graph, nodes represent joints in a
human body and edges represent parameterized spa-
tial relations between these joints. The spatial rela-
tions correspond to average human body proportions.
The nodes contain information on how the joints can
be revolved while maintaining an anatomically plau-
sible state (i.e. without harming a real human if the
same state would be applied). When fitting the agent
into the environment during affordance detection, the
edges of the graph are approximated by cylinders for
collision detection. Contrary to our previous work
(Seib et al., 2015), we do not need an explicit envi-
ronment model E. Rather, E is simply the point cloud
data of a scene where affordances should be detected.
3.2 Fine-grained Affordances
A fine-grained affordance is a property of an affor-
dance that specializes the relation of an agent H and
its environment E. In the presented work, we take the
sitting affordance as an example. The affordance sit-
ting is a generalization of more precise relations that
an agent and its environment can take. In this paper,
we demonstrate our ideas by distinguishing between
the fine-grained affordances sitting without backrest,
sitting with backrest, sitting with armrest and sitting
with headrest.
Note that some of these fine-grained affordances
depend on others. For example, if the environment E
affords sitting with backrest to the agent H it must
(a) (b)
Figure 2: The humanoid model: in an upright standing pose
(a) and in a sitting pose as used in our experiments (b).
Figure 3: The presented affordance model specializes the
sitting affordance into fine-grained affordances. The arrows
indicate the dependencies between the fine-grained affor-
dances. An agent pose for each fine-grained affordance is
displayed. The edges shown in red are used for collision
tests during detection.
necessarily afford sitting without backrest as well, be-
cause the agent can choose not to use the backrest
while seated. The dependencies as defined in our
models are depicted in Figure 3.
For each affordance A, an initial pose of the agent
needs to be defined (so far, we use only one affor-
dance, namely sitting). Thus, every fine-grained af-
fordance F
i
specializing the same affordance A has
the same initial pose. The initial pose refers to the
VISAPP 2016 - International Conference on Computer Vision Theory and Applications
292

(a) discontinuity (b) roughness
(c) height (d) sitability
Figure 4: Membership functions used to find valid positions for sitting affordances. The functions in (a), (b) and (c) are used
to evaluate the rule, while the function in (d) is used for defuzzyfication.
joint states of the simulated agent prior to any trans-
formations and collision tests. Further, each fine-
grained affordance is defined by a number of relevant
body parts of the agent (i.e. edges in the graph H ) that
are tested for collisions, as well as the corresponding
goal angles for transformation.
In the context of this paper we define an affor-
dance A as a set A = {F
0
. . . F
j
} of fine-grained af-
fordances F
i
. The function Aff : H
A
× E × A →
{(F , P, H
g
)
i
} determines for a given environment E ,
affordance A and initial agent configuration H
A
a set
of tuples. Each tuple contains F ⊆ A, a set of fine-
grained affordances present at position P in the en-
vironment with a goal agent configuration H
g
. The
algorithm presented in the next Section is an imple-
mentation of the above function Aff.
4 FINE-GRAINED DETECTION
OF SITTING-AFFORDANCES
The algorithm for fine-grained affordance detection
is essentially based on dropping an agent model in its
initial pose into a point cloud at appropriate positions.
These positions need to be found beforehand. The
joints of the model are then transformed to achieve
maximum contact with the point cloud. Only joints
relevant for a certain affordance are considered. The
initial pose of the agent, as well as the joint trans-
formations are determined by the affordance mod-
els. Further, only the agent model and the affordance
models determine the current functionality of the de-
tected object. This means that the presented approach
also finds objects that might not have been designed
to fulfill a certain functionality. However, based on
visual information and their position in the scene they
afford the desired actions. We confined the evalua-
tion to an agent representing an average human adult
and to fine-grained affordances derived from the af-
fordance sitting. The algorithm is described in the
following. Additionally, it is outlined in Algorithm 1.
4.1 Extracting Positions of Interest
Before fitting the agent into the scene, the search
space needs to be reduced to the most promising po-
sitions. We therefore create a height map of the scene
(Figure 5 (b)). The point cloud is subdivided into cells
of size c. In our experiments a size of c = 0.05 m pro-
vided a good balance between precision and calcula-
tion time. The highest point per cell determines the
cell height. We decided in favor of the highest point
instead of the average to avoid implausible values at
borders of objects, where a cell may contain parts of
the object and e.g. the floor.
Subsequently, a circular template, approximating
the agent’s torso, is moved over the height map to test
whether a cell is well suited for sitting. The diameter
of this template corresponds to the width of the agent
as defined in the model. The decision for each cell
is based on fuzzy sets as introduced by Lotfi Zadeh
(Zadeh, 1965). We define 3 membership functions:
discontinuity, roughness and height (Figure 4). Dis-
continuity is a measure defined in percent of invalid
cells or holes within the current position of the cir-
cular template. Roughness is the standard deviation
of the height of all cells within the circular template.
Finally, the membership function height is used to in-
clude only cells in a certain height that allow comfort-
able sitting with bent knees, while the feet still touch
the ground. However, this function can be disabled in
the algorithm configuration to allow for valid sitting
positions on the ground or on higher planes like ta-
bles. One single rule is enough to decide whether a
Detecting Fine-grained Sitting Affordances with Fuzzy Sets
293

position is suited for affordance detection or not. We
use the intersection of these membership functions to
obtain the following rule: IF roughness is low AND
discontinuity is low AND height is comfortable THEN
the position is suited for sitting. Of course, with more
affordances, more rules will be needed. The fuzzy
value obtained from these functions is defuzzyfied on
the sitability function depicted in Figure 4 (d) using
the first of maximum rule. The test is performed for
both fuzzy sets of this rule, obtaining a crisp value for
sittable and not sittable and deciding in favor of the
fuzzy set with the higher crisp value. The positions
obtained in this manner are used as possible sitting
positions in further algorithm steps (Figure 5 (c)).
4.2 Agent Fitting
On every extracted position,
360
◦
w
agent models in the
initial pose are dropped from a small height (we use a
height of 0.1 m). The total number depends on the pa-
rameter w determining the angular rotation difference
about the vertical axis between 2 subsequently tested
models. We test several models in this step since the
initial circular template was an approximation of the
agent’s torso, while in this step also the corresponding
rotation needs to be found to provide enough room for
the agent’s legs. Dropping the agents is simulated by
stepwise lowering the model until a collision is de-
tected. If a collision occurs before any lowering of
the model, the position is discarded. The affordance
model is applied to all remaining positions.
The relevant joints for the affordance are gradu-
ally transformed from their initial pose to maximum
allowed goal pose. The affordance is detected if a col-
lision with the scene is encountered during the trans-
formation. For instance, the fine-grained affordance
sitting with backrest is detected during the transfor-
mation of the agent’s torso, comparable to the agent’s
movement of leaning backward against a backrest. If
a joint reaches its maximum goal pose without a colli-
sion the algorithms assumes that the affordance is not
present.
We use the open source library Flexible Collision
Library (FCL) (Pan et al., 2012) for collision detec-
tion. FCL detects collisions between 2 objects and
returns the exact position at which the collision oc-
curred. As input for FCL we convert the point cloud
of the scene to the OctoMap representation (Hornung
et al., 2013) and approximate the individual body
parts of the agent by cylinders. The scene and agent
are thus iteratively tested for collisions, by first trans-
forming the corresponding joint and then performing
the collision test. This procedure is repeated until the
goal angle is reached or a collision occurs.
Note that in contrast to normal affordances, a fine-
grained affordances might depend on the existence of
another fine-grained affordance (Figure 3). In the pre-
sented work the sitting without backrest affordances
is checked first, as other affordances depend on it.
Sitting with backrest and sitting with armrests are
Algorithm 1: Fine-grained Detection of Sitting-Affordances.
Require: Agent model H
A
, Point cloud (environ-
ment) E, Affordance models A = {F
0
. . . F
j
},
Ensure: List of tuples L = {(F , P, H
g
)
i
} with F ⊆
A, a set of fine-grained affordances, the position
P in the environment and a goal agent configura-
tion H
g
.
{find candidate positions}
H ← createHeightMap(E)
C ←
/
0
for all cells c ∈ H do
if roughness(c) is low and discontinuity(c) is
low and height(c) is comfortable then
5: C ← C ∪ c
end if
end for
{test whether sitting is possible}
L ←
/
0
F ←
/
0
10: for all c ∈ C and
360
w
orientations of H
A
do
place agent H
A
over cell c
if not collides(H
A
, E) then
lower H
A
until collision
F ← F ∪ F
0
15: P ← getPositionO f Cell(c)
H
g
← H
A
{check all fine-grained affordances}
for all F
i
∈ A do
H ← H
A
while isNotInGoalPose(H ) do
20: trans f ormJoints(H )
if collides(H , E ) then
F ← F ∪ F
i
H
g
← H
end if
25: end while
end for
end if
{save results}
if F 6=
/
0 then
L ← L ∪ (F , P, H
g
)
30: end if
end for
VISAPP 2016 - International Conference on Computer Vision Theory and Applications
294
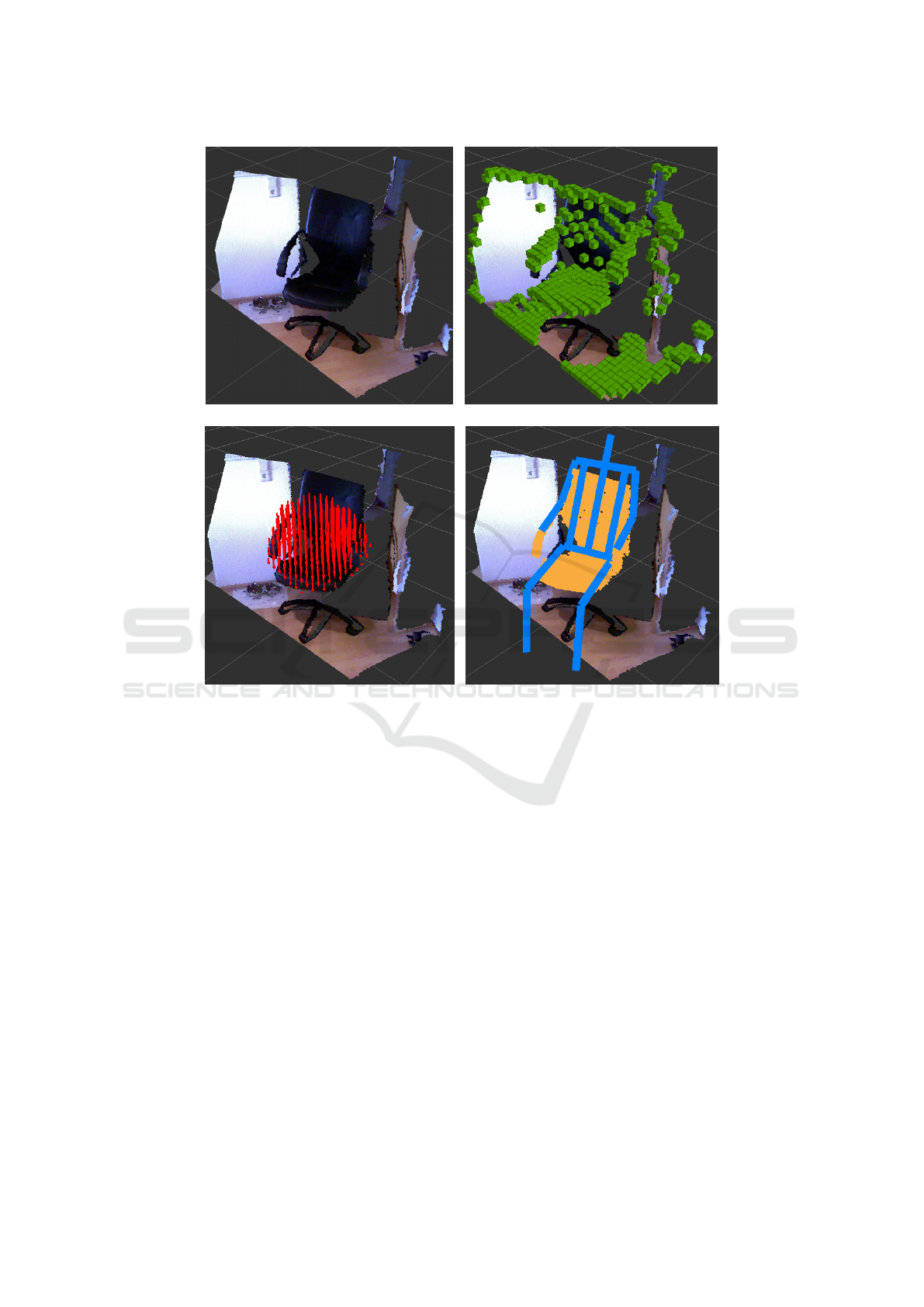
(a) input scene (b) height map
(c) possible positions for sitting (d) segmented object
Figure 5: Illustration of different algorithm steps. The input scene is shown in (a) and the corresponding height map in (b).
Image (c) shows the possible positions for sitting affordances found by our fuzzy set formulation. The length of the red arrows
corresponds to the defuzzyfied value from the sitability function. The final agent pose as well as the object segmentation is
shown in (d) for the fine-grained affordances sitting with backrest and sitting with armrest.
checked subsequently. The sitting with headrest af-
fordance is checked as the last one, since it depends
on the presence of a backrest. The output of this step
is the final pose of the agent (position P and joint
states H
g
), as well as a set of detected fine-grained
affordances F .
4.3 Pose Selection and Object
Segmentation
So far, we have obtained the position and the list of
detected fine-grained affordances. However, we still
have several hypotheses per position, since the agent
was dropped at different rotations. To select the best
pose for each position we use an assessment func-
tion. It is based on the total number of collisions de-
tected for a pose. The assumption behind this is that
a higher number of collisions indicates a more com-
fortable pose (a person sitting comfortably on a chair
touches the chair at more points than a person sitting
on the edge of a chair). We thus select the pose with
the most collision points for each hypothesis position.
This collision based rule favors affordances that in-
volve a higher number of joints. However, this does
not limit the validity of the output since more spe-
cialized affordances (i.e. using more joints) depend
on other affordances which are also present at the de-
tected positions.
After obtaining the affordances and highest rated
poses, the partition of the scene exhibiting that affor-
dance is segmented. We use a region growing algo-
rithm where the position of the detected affordance
serves as seed point. Each point below a certain Eu-
clidean distance is added to the segmented scene part.
A low value is well suited to close small gaps in the
point cloud, but at the same time limit the segmenta-
Detecting Fine-grained Sitting Affordances with Fuzzy Sets
295

Figure 6: Example scenes without sitting affordances in the evaluation dataset.
tion result to one object. Further, points close to the
floor are ignored. The segmentation result is shown
in Figure 5 (d).
5 EVALUATION
We conducted our experiments on real-world data
that was acquired in our lab. Data acquisition was
performed with an RGB-D camera that was moved
around an object and roughly pointed at that object’s
center. In total, we acquired data from 17 different
chairs and 3 stools to represent the fine-grained af-
fordances. From these data, we extracted 248 dif-
ferent views of the chairs and 47 different views of
the stools. Example views of these objects are shown
in Figure 1. Additionally, negative data (i.e. data
without the fine-grained affordances) from 9 differ-
ent furniture objects was obtained and 109 views of
these objects extracted. Negative data includes ob-
jects like desks, tables, dressers and a heating ele-
ment. Example views of negative data are presented
in Figure 6. The whole evaluation dataset contains
404 scene views with 295 positive and 109 negative
data examples. The dataset was annotated with ex-
pected positions and rotations of the agent for the in-
dividual fine-grained affordances. All this data is pro-
vided online
1
and is the first publicly available dataset
with fine-grained affordance annotations.
We applied our affordance detection to these data.
From each scene, the best scored affordance was ex-
tracted and compared to ground truth. If the detected
position was within 0.2 m and within a rotation of 20
◦
to the ground truth, a sitting affordance was correctly
found and is further analyzed for fine-grained affor-
dances. Examples of correct affordance detections are
presented in Figure 7.
The results of the evaluation are shown in Table 1.
Our algorithm is able to find almost all sitting pos-
sibilities, while making only little mistakes, as indi-
1
Test dataset available at https://dl.dropboxusercont
ent.com/u/6693658/affordance dataset.zip
Table 1: Evaluation results for each of the fine-grained af-
fordances.
sitting precision recall f-score
affordance
w/o backrest 0.89 0.97 0.93
with backrest 0.89 0.83 0.86
with armrest 0.84 0.57 0.68
with headrest 0.98 0.39 0.58
cated by the results for the sitting without backrest af-
fordance. While the recall for the sitting with backrest
affordance is below the recall of the first affordance,
it is still high at 83%. The ability of our algorithm
to detect these two specialized affordances at the pre-
sented high rates speaks in favor of the presented ap-
proach. Note that these results were achieved without
any training. All the knowledge required for detection
is encoded in the simple agent and affordance models.
The results for the fine-grained affordances in-
volving an armrest and a headrest are below the afore-
mentioned ones. F-scores of 68% (armrests) and 58%
(headrest) indicate that our algorithm successfully
differentiates between closely related object function-
alities and is able to detect the corresponding fine-
grained affordances in RGB-D data. However, the
lower values indicate that the agent model might need
more degrees of freedom during collision detection
to better find differently shaped chairs. On average,
in its current state our algorithm takes 4.3 seconds to
process one scene (single thread execution).
6 DISCUSSION
The main idea of this paper is to introduce the concept
of fine-grained affordances and overcome the limi-
tations of our previous approach (Seib et al., 2015)
that relied on plane segmentation and, thus, was not
general enough. Here we have shown that our algo-
rithm is able to differentiate affordances on a fine-
grained scale without prior object or plane segmen-
tation. Thus, the presented approach is more general
VISAPP 2016 - International Conference on Computer Vision Theory and Applications
296

Figure 7: Resulting agent poses for some of the scenes in the evaluation dataset.
and can be applied to the input data directly.
To our best knowledge, no similar approaches ex-
ist in the literature that are able to differentiate affor-
dances on a fine-grained scale. This makes it hard (if
not impossible) to assess the quality of our approach
and compare it to related work. We therefore want
to give a discussion on certain properties of our algo-
rithm and give a detailed outlook to our ongoing work
in that field.
Apart from introducing the notion of fine-grained
affordances the biggest difference to related work
such as the approach of Grabner et al. (Grabner et al.,
2011) is that we detect affordances directly. In con-
trast, Grabner et al. learn affordances as properties of
objects which allows them to augment the classifica-
tion ability of their approach. However, our approach
is ignorant of any object categories.
While we believe that our approach will also ben-
efit from machine-learning techniques (e.g. by learn-
ing the membership functions for the fuzzy sets), at
this point we have completely omitted the learning
step. This comes at the cost of manually defining
“reasonable” values for the fuzzy sets (low effort)
and a deformable human model (medium effort). Ad-
ditionally, this raises the question on the extensibil-
ity of the approach. An initial agent pose needs to
be provided for any new affordance that is included.
However, if an agent model is already available (here
for sitting) new poses can be added by simply trans-
forming joint values in the corresponding configura-
tion file, as we have done for illustration in Figure 2
(a). As a second step, the joints of interest that are
involved in the new affordance description, need to
be provided with a minimum and maximum angle for
transformation.
A more complex extension of the algorithm would
be to include a different agent, e.g. a hand for grasp-
ing. While the hand itself can be modeled again as
an acyclic graph of joints, the initial hypotheses se-
lection step must be changed completely. Instead of
finding potential sitting positions in the height map,
for a hand a different hypotheses selection needs to
be applied (e.g. finding small salient point blobs).
However, as soon as these hypotheses are found, the
rest of the algorithm is the same: transform joints of
the agent and evaluate a cost function that reflects
the quality of affordance detection. We thus believe
that the presented approach is generalizable and well
suited for extension.
7 CONCLUSION AND OUTLOOK
In this paper we have further refined the term fine-
grained affordances to better distinguish similar ob-
ject functionalities. We presented a novel algorithm
that is based on fuzzy sets, to detect these affordances.
The algorithm has been evaluated on 4 specializations
of the sitting affordance and we have shown that the
presented approach is able to differentiate affordances
on a fine-grained scale. For comparable state of the art
approaches, these 4 fine-grained affordances would
all have been the same affordance: sitting.
Apart from the ability to distinguish similar ob-
ject functionalities, fine-grained affordances can be
applied as a filtering or preprocessing step for ob-
ject classification. The segmented object that results
from the affordance detection is constrained to object
classes that provide the detected affordance. Thus, if
this object needs to be classified, it does not have to
be matched against the whole dataset, but only against
object classes exhibiting the found affordance.
The presented algorithm is ignorant of any object
classes, since our goal is to detect affordances. This
is evident from the leftmost image in Figure 7, where
the agent is sitting with a backrest although the object
it is sitting on does not have one. Clearly, here the en-
vironmental constellation (object and wall) provided
the detected affordance. This demonstrates a strength
of the concept of fine-grained affordances that we will
further explore in our future work.
Further, we will investigate how an anthropomor-
phic agent model can be exploited to detect more fine-
grained affordances from other body poses. As an ex-
ample for a lying body pose, the fine-grained affor-
dances lying flat and lying on a pillow can be distin-
guished. Fine-grained affordances can also be defined
for other agents, e.g. a hand. In that case, grasping
Detecting Fine-grained Sitting Affordances with Fuzzy Sets
297

with the whole hand and grasping with two fingers
could be distinguished, e.g. for grasp planning for
robotic arms. Additionally, fine-grained affordances
for grasping actions can include drawers and doors
that can be pulled open or pulled open while rotat-
ing (about the hinge). We are currently looking for
more examples for fine-grained affordances for differ-
ent agents, to generalize our approach of fine-grained
affordances.
REFERENCES
Bar-Aviv, E. and Rivlin, E. (2006). Functional 3d object
classification using simulation of embodied agent. In
BMVC, pages 307–316.
Castellini, C., Tommasi, T., Noceti, N., Odone, F., and Ca-
puto, B. (2011). Using object affordances to improve
object recognition. Autonomous Mental Development,
IEEE Transactions on, 3(3):207–215.
Chemero, A. and Turvey, M. T. (2007). Gibsonian affor-
dances for roboticists. Adaptive Behavior, 15(4):473–
480.
Gibson, J. J. (1986). The ecological approach to visual per-
ception. Routledge.
Grabner, H., Gall, J., and Van Gool, L. (2011). What
makes a chair a chair? In Computer Vision and Pat-
tern Recognition (CVPR), 2011 IEEE Conference on,
pages 1529–1536.
Hermans, T., Rehg, J. M., and Bobick, A. (2011). Affor-
dance prediction via learned object attributes. In In-
ternational Conference on Robotics and Automation:
Workshop on Semantic Perception, Mapping, and Ex-
ploration.
Hinkle, L. and Olson, E. (2013). Predicting object func-
tionality using physical simulations. In Intelligent
Robots and Systems (IROS), 2013 IEEE/RSJ Interna-
tional Conference on, pages 2784–2790. IEEE.
Hornung, A., Wurm, K. M., Bennewitz, M., Stachniss,
C., and Burgard, W. (2013). OctoMap: An effi-
cient probabilistic 3D mapping framework based on
octrees. Autonomous Robots. Software available at
http://octomap.github.com.
Jiang, Y. and Saxena, A. (2013). Hallucinating humans for
learning robotic placement of objects. In Experimen-
tal Robotics, pages 921–937. Springer.
Kjellstr
¨
om, H., Romero, J., and Kragi
´
c, D. (2011). Vi-
sual object-action recognition: Inferring object affor-
dances from human demonstration. Computer Vision
and Image Understanding, 115(1):81–90.
Lopes, M., Melo, F. S., and Montesano, L. (2007).
Affordance-based imitation learning in robots. In
Intelligent Robots and Systems, 2007. IROS 2007.
IEEE/RSJ International Conference on, pages 1015–
1021. IEEE.
Maier, J. R., Ezhilan, T., and Fadel, G. M. (2007). The af-
fordance structure matrix: a concept exploration and
attention directing tool for affordance based design. In
ASME 2007 International Design Engineering Tech-
nical Conferences and Computers and Information in
Engineering Conference, pages 277–287. American
Society of Mechanical Engineers.
Maier, J. R., Mocko, G., Fadel, G. M., et al. (2009). Hierar-
chical affordance modeling. In DS 58-5: Proceedings
of ICED 09, the 17th International Conference on En-
gineering Design, Vol. 5, Design Methods and Tools
(pt. 1), Palo Alto, CA, USA, 24.-27.08. 2009.
Montesano, L., Lopes, M., Bernardino, A., and Santos-
Victor, J. (2008). Learning object affordances: from
sensory–motor coordination to imitation. Robotics,
IEEE Transactions on, 24(1):15–26.
Pan, J., Chitta, S., and Manocha, D. (2012). Fcl: A general
purpose library for collision and proximity queries. In
Robotics and Automation (ICRA), 2012 IEEE Interna-
tional Conference on, pages 3859–3866.
Ridge, B., Skocaj, D., and Leonardis, A. (2009). Unsu-
pervised learning of basic object affordances from ob-
ject properties. In Computer Vision Winter Workshop,
pages 21–28.
S¸ahin, E., C¸ akmak, M., Do
˘
gar, M. R., U
˘
gur, E., and
¨
Uc¸oluk,
G. (2007). To afford or not to afford: A new formal-
ization of affordances toward affordance-based robot
control. Adaptive Behavior, 15(4):447–472.
Seib, V., Wojke, N., Knauf, M., and Paulus, D. (2015). De-
tecting fine-grained affordances with an anthropomor-
phic agent model. In Fleet, D., Pajdla, T., Schiele, B.,
and Tuytelaars, T., editors, Computer Vision - ECCV
2014 Workshops, volume II of LNCS, pages 413–419.
Springer International Publishing Switzerland.
Stark, M., Lies, P., Zillich, M., Wyatt, J., and Schiele, B.
(2008). Functional object class detection based on
learned affordance cues. In Computer Vision Systems,
pages 435–444. Springer.
Sun, J., Moore, J. L., Bobick, A., and Rehg, J. M. (2010).
Learning visual object categories for robot affordance
prediction. The International Journal of Robotics Re-
search, 29(2-3):174–197.
W
¨
unstel, M. and Moratz, R. (2004). Automatic object
recognition within an office environment. In CRV, vol-
ume 4, pages 104–109. Citeseer.
Zadeh, L. A. (1965). Fuzzy sets. Information and control,
8(3):338–353.
VISAPP 2016 - International Conference on Computer Vision Theory and Applications
298
