
An Adaptive Stigmergy-based System for Evaluating Technological
Indicator Dynamics in the Context of Smart Specialization
Antonio L. Alfeo
1
, Francesco P. Appio
2
, Mario G. C. A. Cimino
1
, Alessandro Lazzeri
1
,
Antonella Martini
2
and Gigliola Vaglini
1
1
Department of Information Engineering, Università di Pisa, Largo Lazzarino 1, Pisa, Italy
2
Department of Energy, System, Territory and Construction Engineering, Università di Pisa, Largo Lazzarino 1, Pisa, Italy
Keywords: Smart Specialization, Regional Innovation, Trend Analysis, Patent-based Indicators, Marker-based
Stigmergy, Parametric Adaptation, Differential Evolution.
Abstract: Regional innovation is more and more considered an important enabler of welfare. It is no coincidence that
the European Commission has started looking at regional peculiarities and dynamics, in order to focus
Research and Innovation Strategies for Smart Specialization towards effective investment policies. In this
context, this work aims to support policy makers in the analysis of innovation-relevant trends. We exploit a
European database of the regional patent application to determine the dynamics of a set of technological
innovation indicators. For this purpose, we design and develop a software system for assessing unfolding
trends in such indicators. In contrast with conventional knowledge-based design, our approach is
biologically-inspired and based on self-organization of information. This means that a functional structure,
called track, appears and stays spontaneous at runtime when local dynamism in data occurs. A further
prototyping of tracks allows a better distinction of the critical phenomena during unfolding events, with a
better assessment of the progressing levels. The proposed mechanism works if structural parameters are
correctly tuned for the given historical context. Determining such correct parameters is not a simple task
since different indicators may have different dynamics. For this purpose, we adopt an adaptation mechanism
based on differential evolution. The study includes the problem statement and its characterization in the
literature, as well as the proposed solving approach, experimental setting and results.
1 INTRODUCTION AND
MOTIVATION
After years of economic crisis and the resulting
reduction of resources available for research and
development investments, Smart Specialization has
immediately become a very relevant concept to get
these two questions answered (Foray, 2013). It
represents an important chance for a progressive
economical restart. In order to develop a policy-
prioritization logic to foster regional growth is
important to have a deep knowledge of the potential
evolutionary pathways related with the existing
dynamics and the structures at regional level
(McCann and Ortega-Argilès, 2013). In this light,
each region should start this process using as
standpoints the knowledge-based sectors in which
already presents a consistent ‘critical mass’ or, at
least, capabilities that refer to a future potential
exploitable with right and focused investments.
In the last decade, several causes have
determined the increasing need for rationalization of
resources within regions. The crucial ones are the
increased globalization, mainly pursued by
multinational enterprises, the economic crisis
involving all EU regions with different magnitudes
and the diffusion of a new wave of general purpose
technologies. This situation calls for a deep
rethinking of the overall approach to regional
development; policy-makers and experts largely
agree on the fact that the new economic boost should
originate exploiting and enhancing the specific
potential and competitive advantage of each region
through focused innovation policies. On this line, the
European Commission has established a program
labelled ‘Smart Specialization’, consisting in a set of
policies and guidelines aimed to promote the
Alfeo, A., Appio, F., Cimino, M., Lazzeri, A., Martini, A. and Vaglini, G.
An Adaptive Stigmergy-based System for Evaluating Technological Indicator Dynamics in the Context of Smart Specialization.
DOI: 10.5220/0005645204970502
In Proceedings of the 5th International Conference on Pattern Recognition Applications and Methods (ICPRAM 2016), pages 497-502
ISBN: 978-989-758-173-1
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
497

efficient and effective use of public investment in
research and development (R&D).
Smart Specialization is defined as “an industrial
and innovation framework for regional economies
that aims to illustrate how public policies,
framework conditions, but especially R&D and
innovation investment policies can influence
economic, scientific and technological specialization
of a region and consequently its productivity,
competitiveness and economic growth path. It is a
logical continuation in the process of deepening,
diversifying and specializing of more general
innovation strategies, taking into account regional
specificities and inter-regional aspects, and thus a
possible way to help advanced economies (as well as
emerging economies) to restart economic growth by
leveraging innovation led / knowledge-based
investments in regions” (OECD 2013, p.17). From
one hand, this approach requires the concentration of
R&D resources in few domains; from the other
hand, a consisting part of literature underlines the
importance of industry diversification in promoting
innovation. In this light, the dichotomy
specialization-diversification has become topical.
The long term aim of this work is exploring
whether - and to what extent - different policies of
‘technological specialization’ and ‘technological
diversification’ pays off in term of wealth creation at
regional level. Then, we want to provide policy
makers with computerized support in the analysis of
innovation-relevant trends (Jin, 2014). To properly
move into that direction, we start looking at this
problem by analysing the trends of the
aforementioned indicators for 268 EU-27 regions
over 35 technological domains in the period 1990-
2012, in order to obtain a model that can efficiently
recognize significant events. For this purpose, we
have designed and developed a software system. In
contrast with conventional knowledge-based design,
our approach is biologically-inspired and based on
stigmergy as a mechanism of self-organization of
information. Moreover, the performance of such a
model is contrasted with a supervised adaptation
based on the Differential Evolution (DE hereafter).
2 BIOLOGICALLY-INSPIRED
DATA ANALYSIS
In this paper we propose to use the principles of the
stigmergy for assessing unfolding trends in time
variant indicators. In biology, stigmergy is an
indirect communication mechanism between
individuals of an insect society. In marker-based
stigmergy (Parunak, 2006) volatile substances, such
as pheromones, maintain the information locally for
other individual to perceive. In computer science,
marker-based stigmergy can be employed as a
powerful computing paradigm exploiting both
spatial and temporal dynamics, because it
intrinsically embodies the time domain (Cimino et
al., 2015). Moreover, marker-based stigmergy can
be considered a computational black box modelling
approach, because no domain model is assumed at
design time and then results are not directly
interpretable.
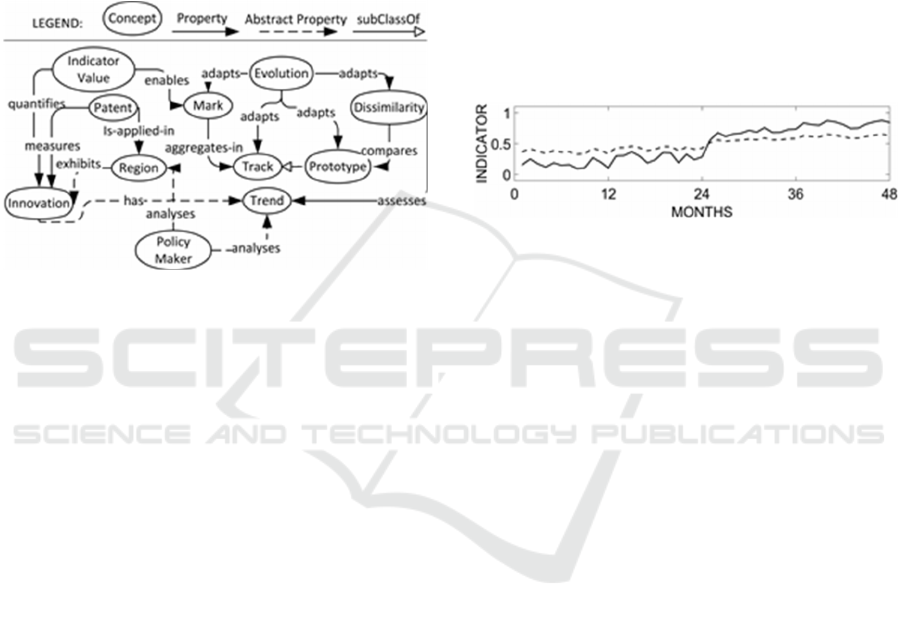
In Figure 1 we present the terminology via an
ontology diagram. Concepts are enclosed in white
ovals and connected by properties (represented as
black directed edges). A property that cannot be
directly sensed (i.e., instantiated) is represented as
an abstract property, shown by a dashed edge.
More specifically, it is known that diversification
and specialization of Patents applied in a Region
measure the Innovation of the region itself. Thus, it
is important for a Policy Maker to analyse Trends of
Innovation, to properly address the investments.
Such trends cannot be directly sensed nor associated
to the Innovation. For this purpose, there are three
important indicators which quantify Innovation:
specialization (S), related variety (R), and unrelated
variety (U). The study of such Trends by the Policy
Maker is fundamental to recognize scenarios of
interest, i.e., the ways in which special situations
may develop. Example of scenarios of interest are:
(i) R or U decreases, while S increases; (ii) R or U
decreases, while S is stable; (iii) R or U increases,
while S is stable;(iv) R or U increases, while S
increases.
The problem is to detect variations of an
indicator in terms of increase, decrease or stability.
In this paper, we adopt an emergent modeling
perspective. With an emergent approach, the focus is
on the low level processing. In Figure 1 we also
present the terminology related to the approach.
More specifically, an Indicator Value enables the
release of a Mark. Marks aggregate in Tracks,
depending on their spatiotemporal local dynamics.
Emergent paradigms are based on the principle of
the self-organization of the data, which means that a
functional structure, the Track, appears and stays
spontaneous at runtime when local dynamism
occurs. A particular Track representing only the
main characteristics of such local dynamics is the
Prototype. It is the Dissimilarity which compares
Prototypes generated at different times, in order to
assess the Trend. Finally, the Evolution process
ICPRAM 2016 - International Conference on Pattern Recognition Applications and Methods
498
adapts Mark, Track, Prototype and Dissimilarity to
properly fit the temporal dynamics of the indicators.
The Evolution process represents the application of
biologically-inspired patterns to adapt parameters.
The approach iteratively tries to improve a
population of candidate parameters with regard to a
given measure of quality, or fitness. Solutions are
found by means of transformation mechanisms
inspired by biology, such as reproduction, mutation,
recombination, selection, in an environment where
competition is represented by the quality measure.
Figure 1: Ontological view of the approach.
3 ARCHITECTURAL DESIGN
Figure 3 illustrates the system architecture, made of
four main subsystems, i.e., marking, trailing,
prototyping, and dissimilarity. At the input/output
interfaces of each subsystem, an unbiasing module
is used for a better efficiency and alignment of the
processing layers. This lets an input signal to reach a
certain level before a processing layer passes it to
the next layer, and allows a better distinction of the
critical phenomena during unfolding events, with a
better detection of the progressing levels.
The marking subsystem transforms input data
into marks, whereas the trailing subsystem
aggregates and evaporates marks as a track in the
stigmergic space. The prototyping subsystem
provides a simplified version of the track. It is a
vehicle of abstraction, leading to the emergence of
high-level information. The dissimilarity subsystem
evaluates the difference between consecutive
prototypes in order to extract trend information of
the indicators. The proposed mechanism works if
structural parameters are correctly adapted for the
given application context. Determining such correct
parameters is not a simple task since different
indicators may have different dynamics. For this
purpose, we adopt a tuning mechanism based on the
DE. In the next subsections each module and
subsystem is precisely described, by using a pilot
data sample.
The Unbiasing Module
Figure 2 shows the U indicator of a region for 4
years, in dashed line. To unbias the input signal the
s-shaped function is used, having the following
behaviour: input values smaller\larger than (β - α)/2
are lowered\raised; values smaller\larger than α\β
assume the minimum\maximum value, i.e., 0\1. In
biologically inspired subsystems, this function
models the active zone of a signal generated by a
subsystem (Avvenuti et al., 2013). Figure 2 shows in
thick line the unbiasing output, with α
M
=0.2, β
M
=0.8.
Figure 2: An example of application of unbiasing.
The Marking Subsystem
The Marking takes an unbiased sample
(t) of a
normalized input time series D, and releases a mark
in a marking space whose codomain is called
intensity (Cimino et al., 2015). The mark has four
structural attributes: the center position
(t), the
intensity I, the mark extension ε, and the mark
evaporation θ. Figure 4 (a) shows, in thick line, the
mark released by the sample
(2) of our pilot time
series. The mark shape is an isosceles triangle: its
center is
(2)=0.25, its height I=1, and its base has
length 2ε=0.5.
The Trailing Subsystem
The evaporation θ is the temporal decay of the
mark. After each step the mark intensity decreases
by a percentage θ. Thus, evaporation leads towards a
progressive disappearance of the mark. Anyway,
subsequent marks can reinforce previous mark in the
environment if their shapes overlap. In Figure 4 (b)
we also show the mark
(2) after an evaporation
step, in thin line. In Figure 4 (right) we show in thin
line three consecutive marks, their apex coordinates
(x, y). We also show the final track, T
3
at time t=3,
in thick line, as the sum of the track intensities
The Prototyping Subsystem
The Prototyping subsystem takes as input the
output track of the trailing subsystem, T
t
. This input
is first unbiased, as
t
. The prototype P
t
is then
generated as a triangular shape, with base width 2ε,
An Adaptive Stigmergy-based System for Evaluating Technological Indicator Dynamics in the Context of Smart Specialization
499
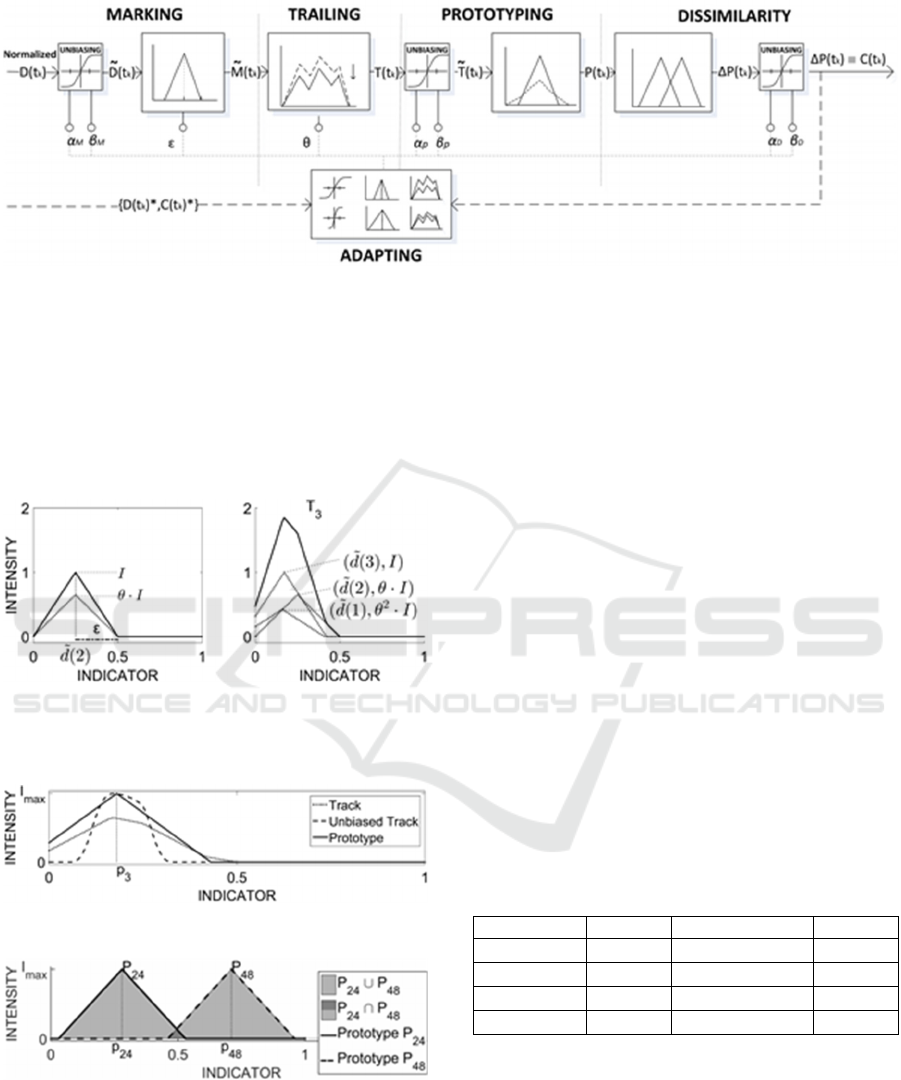
Figure 3: Architectural overview of our data analysis system based on Stigmergy.
saturation height I
max
=I/(1-θ) (Avvenuti et al., 2013),
and center p
t
. Figure 5 shows in dotted line the track
T
3
of Figure 4 (b), the unbiased track
3
in dashed
line, and the corresponding prototype P
3
centered in
p
3
in solid line. The center p
t
of the prototype is the
position that maximizes the similarity between the
unbiased track and the prototype itself.
(a) (b)
Figure 4: Single mark shape (a) and aggregation of three
marks (b) in a track.
Figure 5: An example of prototyping.
Figure 6: Similarity between two prototypes sampled at
the 24
th
and 48
th
months of the time series, respectively.
The similarity between two shapes is
(
,
)
=
∩
∪
⁄
. It is the ratio
between the intersection and the union of the shapes.
In Figure 6,
(
,
)
= 0.0097.
The Dissimilarity Subsystem
This subsystem calculates the complement of the
similarity between two prototypes generated at two
instant of times, with a positive (negative) sign if the
barycenter of the most recent track is larger
(smaller) than the previous: ∆ = (1 − (
,
)∙
(
−
). In Figure 6, ∆ = 0.9903. An
unbiasing module is finally used, in order to provide
one of three different classes as output: -1, +1, or 0,
when the time series decreases, increases, or it is
otherwise considered stable, respectively. In Figure
6, ∆
=1, meaning that the indicator increases.
The Adapting Subsystem
The overall system uses 8 structural parameters
(summarised in Table 1) to be appropriately adapted.
Since different indicators in different Regions have
different dynamics, manual adaptation is very time-
consuming, human-intensive and error-prone
(Ciaramella, 2010). In this section, we first describe
the role of each parameter in the processing, and
then we adopt a supervised optimization based on
DE, an evolutionary technique for numerical
optimization problems (Cimino et al., 2015).
Table 1: System Parameters.
Module Params Human Expert Range
marking
α
M
β
M
ε
(0.2; 0.8; 0.2) (0, 1)
trailing
θ
(0.65) (0, 1)
prototyping
α
P
β
P
(0.15; 0.75) (0, I
max
)
dissimilarity
α
D
β
D
(0.35; 0.65) (0, 1)
The mark extension (
ε
) controls the distance of
interaction between marks. If it is close to 0, the
marks cannot interact with each other, and there is
no patterns reinforcement. If the mark extension is
close to 1, all marks reinforce each other without
distinction between patterns. The mark evaporation
(
θ
) affects the lifetime of a mark. Short-life marks
evaporate to fast preventing aggregation and pattern
reinforcement. Long-life marks cause an early
ICPRAM 2016 - International Conference on Pattern Recognition Applications and Methods
500
saturation of the track, thus all tracks become similar
to each other. Finally, α and β affect the system as
previously described in the unbiasing module.
The adaptation uses the DE algorithm to
optimize the parameters of the system with respect
to the fitness computed using a training set. Let Z be
the set of Regions in the dataset, D
z
(t
k
) the input
signal for Region z, c
z
(t
k
) ∈ {-1,0,1} the output of
the system. Let us consider {D
z
(t
k
)*, C
z
(t
k
)*} the
training set. We compute the average fitness among
Regions as the Mean Squared Error (MSE) between
the outputs of the system calculated for the training
inputs and their corresponding training outputs:
(
)
=
∑∑
(
(
)
∗
−
(
))
∙
⁄
.
In the DE algorithm, a solution is represented by
a real n-dimensional vector, where n is the number
of parameters to tune. The DE starts with a
population of N candidate solutions, injected or
randomly generated. In the literature different ranges
of population are suggested (Mallipeddi et al.,
2011). Population size spread can vary from a
minimum of 2n to a maximum of 40n. A higher
number increases the chance to find an optimal
solution but it is more time consuming. To balance
speed and reliability we use N=20. At each iteration
and for each member (target) of the population, a
mutant vector is created by mutation of selected
members and then a trial vector is created by
crossover of mutant and target. Finally, the best
fitting among trial and target replaces the target.
Many strategies of the DE algorithm have been
designed, by combining different structure and
parameterization of mutation and crossover
operators (Mezura et al., 2006 and Zaharie, 2007).
We adopted the DE/1/rand-to-best/bin version,
which places the perturbation at a location between a
randomly chosen population member and the best
population member. The differential weight F ϵ [0,2]
mediates the generation of the mutant vector. F is
usually set in [0.4-1) (Mezura et al., 2006). There are
different crossover methods in DE. Results show
that a competitive approach can be based on
binomial crossover (Zaharie, 2007). With binomial
crossover, a component of the offspring is taken
with probability CR from the mutant vector and with
probability 1-CR from the target vector. A good
value for CR is between 0.3 and 0.9 (Mallipeddi et
al., 2011).
4 CASE STUDY AND RESULTS
The case study is based on a data set that contains
the three annual indicators S, U, R, (described in
Section 1) monitored for 15 years for 200 European
Regions. The dataset contains 9000 samples. In
order to reduce data to a canonical size, the
following normalization is first applied:
=
(
−
)(
−
)
⁄
. Since the original data
samples are subject to significant sampling error, we
also performed a granulation process (Cimino et al.,
2014). More specifically, for each year we grouped
regions via k-nearest neighbour algorithm. For each
group we computed the annual mean μ and the
standard deviation σ. We also determined that the
resulting indicator samples are well-modelled by a
normal distribution, using a graphical normality test.
Finally, monthly samples have been derived
considering normal distribution with mean and
variance μ/12 and σ
2
/12, respectively.
To choose the best value of CR and F, we first
performed trials with CR in [0.3, 0.6, 0.9] and F in
[0.4, 0.6, 0.8]. For each experiment, 5 trials have
been carried out, by using the 20% of the dataset as
a training set, and the remaining 80% as a testing
set. We also determined that the resulting MSE
samples are well-modelled by a normal distribution,
using a graphical normality test. Hence, we
calculated the 95% confidence intervals. Table 2
shows the results in the form “mean ± confidence
interval”. The best performance has been with
CR=0.6 and F=0.6. In general, we observed that
fitness function gets stable after 15 generations only.
Table 2: 95% confidence interval of the MSE for the best
setting of differential weight (F) and crossover rate (CR).
F
0.4 0.6 0.8
CR
0.3
0.022 ±
0.0002
0.012 ±
0.00002
0.018 ±
0.0002
0.6
0.019 ±
0.0002
0.009±
0.0001
0.011 ±
0.00001
0.9
0.014 ±
0.00006
0.013 ±
0.00007
0.013 ±
0.00007
In order to assess the effectiveness of the
approach, we adopted a 5-fold cross-validation.
Indeed, each evaluation is also dependent on the data
points, which end up in the training and test sets. For
each trial, the training and test sets consist,
respectively, of randomly extracted 20% and 80% of
the original data. We carried out each trial 5 times.
Table 3 summarizes, for indicator U, the results in
terms of mean and standard deviation of the MSE
for each trial. The low values of the MSE, for all
trials and for both training and testing sets, highlight
the effectiveness of the system in terms of both
performance and generalization properties. We
An Adaptive Stigmergy-based System for Evaluating Technological Indicator Dynamics in the Context of Smart Specialization
501

replicated the same experiments and achieved
similar performances for the other indicators.
Finally, to highlight the great benefits of the
adaptation subsystem, we also computed the MSE
for the worst case of Table 2 (i.e., Trial 5), by using
manual adaptation: this implied an MSE of 0.106,
which is very higher than 0.022.
Table 3: MSE for each trial extracted via 5-fold cross-
validation, averaged over 5 repetitions.
MSE (mean ± std dev)
Trial Training Set Testing Set
1
0.011 ± 0.010 0.018 ± 0.004
2
0.010 ± 0.010 0.020 ± 0.003
3
0.009 ± 0.006 0.020 ± 0.008
4
0.008 ± 0.008 0.020 ± 0.005
5
0.010 ± 0.007 0.022 ± 0.008
5 CONCLUSIONS
In this paper, we designed and developed a software
system for assessing unfolding trends in innovation
indicators. The core processing is based on
stigmergy, a biologically inspired computational
mechanism. Since the emergent character of
stigmergy depends on biases and scale factors that
can vary for different application contexts, an
essential module is the parametric adaptation. For
this purpose, we adopted the Differential Evolution.
Experiments show the effectiveness of the approach
and the relevant improvements with respect to a
human parameterization.
More precisely the proposed system has been
used to detect the trends of three different patent-
based indicators within 35 technological domains,
belonging to 268 European regions, in the period
1990-2012. The experimental results show that using
20% of the data set as training set to recognize
trends ranging from -1 to 1, the system achieved an
MSE of 0.02. Nevertheless, to ensure high-quality
and robust design, the system should be cross-
validated against other case studies and compared
with existing approaches suitable for the same
purpose. An important future development will be to
adopt benchmark data and to carry out a
comparative analysis of our approach with
alternative techniques available in the literature.
ACKNOWLEDGEMENTS
This work is supported by the University of Pisa, via
the research project entitled “Stigmergic Footprint of
Radical Innovations for Smart Specialisation in
North-American and European Regions”.
REFERENCES
Avvenuti, M., Cesarini, D., and Cimino, M.G.C.A., 2013,
‘MARS, a Multi-Agent System for Assessing Rowers
Coordination via Motion-Based Stigmergy’, Sensors,
vol. 13, pp. 12218-12243.
Ciaramella, A., Cimino, M.G.C.A., Lazzerini, B., and
Marcelloni, F., 2010, ‘Using Context History to
Personalize a Resource Recommender via a Genetic
Algorithm’, in Proceeding of the International
Conference on Intelligent Systems Design and
Applications, ISDA’10, IEEE, pp. 965-970.
Cimino, M.G.C.A., Lazzeri, A., and Vaglini, G., 2015,
‘Improving the Analysis of Context-Aware
Information via Marker-Based Stigmergy and
Differential Evolution’, Artificial Intelligence and Soft
Computing, vol. 9210, pp. 341-352.
Cimino, M.G.C.A., Lazzerini, B., Marcelloni, F., and
Pedrycz, W, 2014, ‘Genetic interval neural networks
for granular data regression’, Information Sciences,
vol. 257, pp. 313-330.
Foray, D., 2013, ‘The economic fundamentals of Smart
Specialisation’, Ekonomiaz, vol. 83, pp. 55-82.
Jin, B., Ge, Y., Zhu, H., Guo, L., Xiong, H., and Zhang,
C., 2014, ‘Technology Prospecting for High Tech
Companies through Patent Mining’, in Proceedings of
the International Conference of Data Mining (ICDM),
IEEE, pp. 220-229.
Mallipeddi, R., Suganthan, P.N., Pan, Q.K. and
Tasgetiren, M., 2011, ‘Differential evolution algorithm
with ensemble of parameters and mutation strategies,’
Applied Soft Computing, vol. 11, pp.1679-1696.
McCann, P., and Ortega-Argilés, R., 2013, ‘Smart
specialization, regional growth and applications to
European union cohesion policy’, Regional Studies,
vol. 49, pp. 1291-1302.
Mezura-Montes, E., Velázquez-Reyes, J., and Coello,
C.A., 2006, ‘A comparative study of differential
evolution variants for global optimization,’
Proceedings of the 8th annual conference on Genetic
and evolutionary computation, ACM, pp. 485-482.
Organization for Economic Co-operation and
Development (OECD), 2013, Innovation-driven
growth in regions: the role of Smart Specialization.
OECD, Paris.
Parunak, V. H., 2006, ‘A survey of environments and
mechanisms for human-human stigmergy’,
Environments for Multi-Agent Systems II, Springer
Berlin Heidelberg, pp. 163-186.
Zaharie, D., 2007, ‘A comparative analysis of crossover
variants in differential evolution’, Proceedings of
IMCSIT, 2nd International Symposium Advances in
Artificial Intelligence and Applications, pp. 171-181.
ICPRAM 2016 - International Conference on Pattern Recognition Applications and Methods
502
