
On the Contribution of Saliency in Visual Tracking
Iman Alikhani
1
, Hamed R.-Tavakoli
2
, Esa Rahtu
3
and Jorma Laaksonen
2
1
Department of Computer Science and Engineering, University of Oulu, Oulu, Finland
2
Department of Computer Science, Aalto University, Espoo, Finland
3
Center for Machine Vision Research, University of Oulu, Oulu, Finland
Keywords:
Saliency, Mean-shift Tracking, Target Representation.
Abstract:
Visual target tracking is a long-standing problem in the domain of computer vision. There are numerous
methods proposed over several years. A recent trend in visual tracking has been target representation and
tracking using saliency models inspired by the attentive mechanism of the human. Motivated to investigate the
usefulness of such target representation scheme, we study several target representation techniques for mean-
shift tracking framework, where the feature space can include color, texture, saliency, and gradient orientation
information. In particular, we study the usefulness of the joint distribution of color-texture, color-saliency,
and color-orientation in comparison with the color distribution. The performance is evaluated using the visual
object tracking (VOT) 2013 which provides a systematic mechanism and a database for the assessment of
tracking algorithms. We summarize the results in terms of accuracy & robustness; and discuss the usefulness
of saliency-based target tracking.
1 INTRODUCTION
Visual object tracking is an old problem in computer
vision with application in surveillance, traffic con-
trol, object-based video compression, video indexing,
human-computer interaction, traffic monitoring, and
etc. The literature of computer society is full of vari-
ous techniques such as point tracking based methods,
kernel tracking schemes and silhouette tracking ap-
proaches (Yilmaz et al., 2006). A point tracker relies
on points in order to associate an object with its state
in previous frames. Silhouette-based approaches take
advantage of object region estimation in each frame
where the object region is often represented in terms
of a shape model (e.g., contours) and is tracked over
time by a matching mechanism. Kernel-based tech-
niques encode the object shape and appearance as a
template with an associated density, named kernel,
and track the object in successive frames.
The tracking algorithms rely on a means of tar-
get representation. The target representation is influ-
enced by both algorithm and constraints such as com-
putational power, necessity of training free start, ro-
bustness, illumination change, and etc. In many in-
teractive scenarios, with real-time requirements, fea-
ture based target representation is desirable where
simple features like color cues are preferred. Re-
cently, a trend in such cases have been the use of
saliency-based features in order to boost the track-
ing performance. In this context, the models get
the advantage of saliency in target representation,
e.g., (Frintrop and Kessel, 2009) proposed a cogni-
tive observation model inspired by human visual sys-
tem. (Borji et al., 2012) extended the model of (Frin-
trop and Kessel, 2009) to incorporate the background
context in a CONDENSATION-based tracker. The
saliency-based target representation was also adopted
by (Tavakoli and Moin, 2010; Plataniotis and Venet-
sanopoulos, 2000) in a kernel-based framework (Co-
maniciu et al., 2003), where the joint distribution of
color and saliency is utilized. These methods show
effective contribution of salience, albeit on a lim-
ited number of sequences or particular task specific
videos. This provides the motivation for investigating
saliency contribution on a fairly general database in
order to identify its strength and weaknesses for ob-
ject tracking.
We specifically address the following question
“How well does mean-shift algorithm benefit from
saliency-based target representation?”. To find an
answer, we explore various features useful for tar-
get representations and assess the performance of ob-
ject tracking using them. We build target models
using joint distribution of color with edge, texture,
Alikhani, I., R.-Tavakoli, H., Rahtu, E. and Laaksonen, J.
On the Contribution of Saliency in Visual Tracking.
DOI: 10.5220/0005648900170021
In Proceedings of the 11th Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2016) - Volume 4: VISAPP, pages 17-21
ISBN: 978-989-758-175-5
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
17

and saliency. Afterwards, the performance of feature
combinations are evaluated in different circumstances
within a mean-shift tracking framework.
2 TRACKING FRAMEWORK
The mean-shift tracking is an ideal framework for the
analysis of various target representations because as
a deterministic framework, it guarantees insensitive
to algorithm results. The initial idea of mean-shift
was introduced in (Fukunaga and Hostetler, 1975)
and developed by (Comaniciu et al., 2003) into an
efficient tracking procedure, which is still useful in
many real-time applications. It requires a reference
model to represent the target which is achieved by us-
ing the probability distribution function (PDF) of fea-
tures within a target patch. Having a normalized tar-
get patch, {x
∗
i
}
i=1,..,n
consisting of n pixels, the target
model is defined as q = {q
f
}
f=1...m
where
{q
f
}
f=1,2,..,m
= α
n
∑
i=1
K
kx
∗
i
k
2
δ(b(x
∗
i
) − f), (1)
{q
f
}is the probability of feature f in target model
q, α = 1/
∑
n
i=1
K
kx
∗
i
k
2
is a normalizing constant,
K (.) is an isotropic kernel, δ is the Kronecker delta
function and b : R
2
→ {1. . . m} is a mapping func-
tion to associate a pixel to its corresponding bin in the
feature space PDF.
Once the tracking framework has a target model,
it starts the tracking procedure by examining target
candidates. A target candidate, p = {p
f
}
f=1...m
, is
obtained by examining a candidate patch {x
i
}
i=1,..,n
centered at location y where
{p
f
}
f=1,2,..,m
= β
h
n
∑
i=1
K
k(y−x
i
)/hk
2
δ(b(x
i
) − f),
(2)
{p
f
} is the probability of feature f in candidate
model p, β
h
= 1/
∑
n
i=1
K
k(y−x
i
)/hk
2
is a normal-
izing constant, and K (.) is an isotropic kernel with
bandwidth h. The tracking procedure tries to maxi-
mize the Bhattacharyya coefficient between p and q,
bc(q, p
y
) =
∑
f
√
p
f,y
q
f
, to obtain the new location of
the target, denoted as y
new
. The procedure can be for-
mulated as an iterative distance minimization prob-
lem (Comaniciu et al., 2003) which is summarized as
follows:
y
new
=
∑
i
x
i
w
i
∑
i
w
i
, (3)
w
i
=
∑
f
r
q
f
p
f,y
δ(b(x
∗
i
) − f), (4)
where p
f,y
indicates a candidate model located at y.
Thus, the complete tracking procedure can be sum-
marized in Algorithm 1.
Algorithm 1: Mean-Shift Algorithm.
Require: target model q, location of target (y) from
previous frame, minimum distance ε, number of
maximum iteration N
1: Initialize number of iterations, t ← 0.
2: repeat
3: make a candidate model p.
4: compute y
new
using (3)
5: d ← ky
new
−yk
6: y ← y
new
and t ←t + 1
7: until t < N and ε < d
3 MODEL REPRESENTATION
The mean-shift framework relies on the probability
density function of features in order to model and
track a target. The original mean-shift algorithm uti-
lizes color space as a global feature. The color space
is often a well discriminative feature and is an easily
accessible piece of information. The distribution of
color is encoded in terms of a histogram of quantized
colors. We adopt the RGB feature representation as a
baseline and evaluate the other target models against
it. To model the target using RGB, we quantize each
color channel into 8 bins and form a histogram by
concatenating the histogram of each channel resulting
in a feature space of size 512(8 ×8 ×8). We identify
this model representation as ‘RGB’.
The RGB-based mean-shift tracking is prone to
missing target when the appearance of target and
background are similar. In order to improve the ro-
bustness and prevent target loss, Ning et al. (Ning
et al., 2009) incorporated the texture information.
They utilized texture information in terms of a mod-
ified local binary patterns (LBP) (Ojala et al., 2002)
to efficiently extract edge and corner like areas as tex-
tured regions and build a joint distribution of color
and texture. We adopt the same approach to model
target using color-texture which results in a feature
space of 2560. The same parameter setting is utilized;
therefore each color channel is quantized into 8 bins
and a modified LBP operator of 5 bins is used
1
. Fur-
thermore, we also investigate target modeling using
the original LBP operator. We refer to the first target
model, proposed by (Ning et al., 2009), as ‘RGB-
LBP5’ and call the latter model ‘RGB-LBP’.
1
We use the source code provided by authors which
is available online at: http://www4.comp.polyu.edu.hk/
∼cslzhang/code/IJPRAI
demo software.zip
VISAPP 2016 - International Conference on Computer Vision Theory and Applications
18

Saliency-based target representation has been fa-
vored to replace the LBP-based target representation
in (Tavakoli and Moin, 2010). The saliency is mea-
sured using a similarity operator, called local similar-
ity number (LSN) (Tavakoli et al., 2013). It is defined
in terms of the amount of similarity between a pixel
and its surrounding pixels, where a salient pixel is less
similar to its surroundings. The saliency values can
be quantized to define the amount of pop-out qual-
ity of a pixel. We use the same settings as (Tavakoli
et al., 2013) where the saliency values correspond-
ing to the low saliency regions are suppressed to zero
and discarded. Then, the joint distribution of the
color-saliency is built using color and the remain-
ing saliency values quantized into 5 bins. By sup-
pressing the low saliency regions to zero, (Tavakoli
et al., 2013) preserves the unity of the target model
and neglect the non-salient regions within the target
area resulting in target miss in some circumstances.
Thus, we also study an alternative model in which the
low saliency values are not suppressed and the whole
saliency value span is quantized into 9 bins, i.e., we
use
LSN
d
8,1
= 1+
7
∑
i=0
ˆ
f(g
i
−g
c
,d), (5)
ˆ
f(x,d) =
1 |x| ≤ d
0 |x| > d
, (6)
where g
c
and g
i
are the gray scale values at the cen-
ter and i-th neighboring pixel and d is a similarity
margin. These target models are identified as ‘RGB-
LSN5’ and ‘RGB-LSN’, respectively.
The concept of saliency modeling in target repre-
sentation is putting weight on the visually attractive
regions which can be modeled using edges. In fact,
we also study normalized gradient orientation for tar-
get modeling. The normalized gradient orientation
is a discriminative feature which is resistant towards
noise and illumination change and is applied in many
visual descriptors such as (Dalal and Triggs, 2005).
To utilize gradient orientation, we convolve the im-
age patch with F
x
= [1,0,−1] and F
y
= [1,0,−1]
T
and
quantize the orientation into 9 bins. This feature en-
codes the edginess of the target. Afterwards, the joint
distribution of color and gradient orientation is built.
This results in a feature space of size 8×8×8×9, 8
bins per color channel and 9 bins for the gradient ori-
entation. We call this target model ‘RGB-OG’ in the
rest of the paper.
4 EXPERIMENTS
We use the visual object tracking (VOT) 2013 toolkit
Table 1: Average iteration until convergence. The average
iteration is reported for all the valid frames of the baseline
experiment.
Target Model Average Iteration
RGB-LSN 4.32
RGB-LBP 4.38
RGB-OG 4.38
RGB 4.38
RGB-LSN5 (Tavakoli et al., 2013) 4.67
RGB-LBP5 (Ning et al., 2009) 4.96
and benchmark (Kristan et al., 2013). It consists
of various real-life sequences proved by a rich and
small corpus of 16 videos. Since each frame of a
video is labeled with a visual attribute to reflect a
particular challenge: (i) occlusion, (ii) illumination
change, (iii) motion change, (iv) size/scale change,
(v) camera motion, and (vi) non-degraded, adopting
VOT helps providing an insight about the behavior of
each target representation in encountering these cir-
cumstances. The performance metrics provided by
the VOT toolkit are accuracy and robustness. The
accuracy is defined in terms of the overlap between
the tracker predicted bounding box and the ground-
truth bounding box. The robustness is measured by
the failure rate obtained from counting the number of
times the tracker drifted from the target, where the
overlap between prediction and ground-truth is zero.
All the experiments are repeated several times, and
the average repetitions are reported. (Please consult
VOT documents for the details (Kristan et al., 2013).)
To validate the role of target representation in con-
vergence speed, we complemented the VOT metrics
with an average convergence metric. It is estimated
by averaging the number of iterations it takes for the
algorithm to converge into a stable candidate model
for all the valid frames (the frames where the target is
not lost).
Three experiments are performed: baseline, ini-
tialization perturbation and gray-scale. The baseline
experiment tests the tracker performance against all
the sequences. The region noise assesses the per-
formance by perturbing the bounding-boxes at the
initialization, and gray-scale experiment repeats the
baseline experiment by converting the sequences into
gray-scale. In order to perform the gray-scale exper-
iment, we treated the gray-scale frames as color by
replicating the gray channel into three channels. To
assess the convergence speed, we re-implemented the
baseline experiment to report the convergence rate of
methods for valid frames.
Table 2 summarizes the overall ranking results of
the evaluated target models. We performed the rank-
ing of algorithms in conjunction with the 2013 chal-
On the Contribution of Saliency in Visual Tracking
19
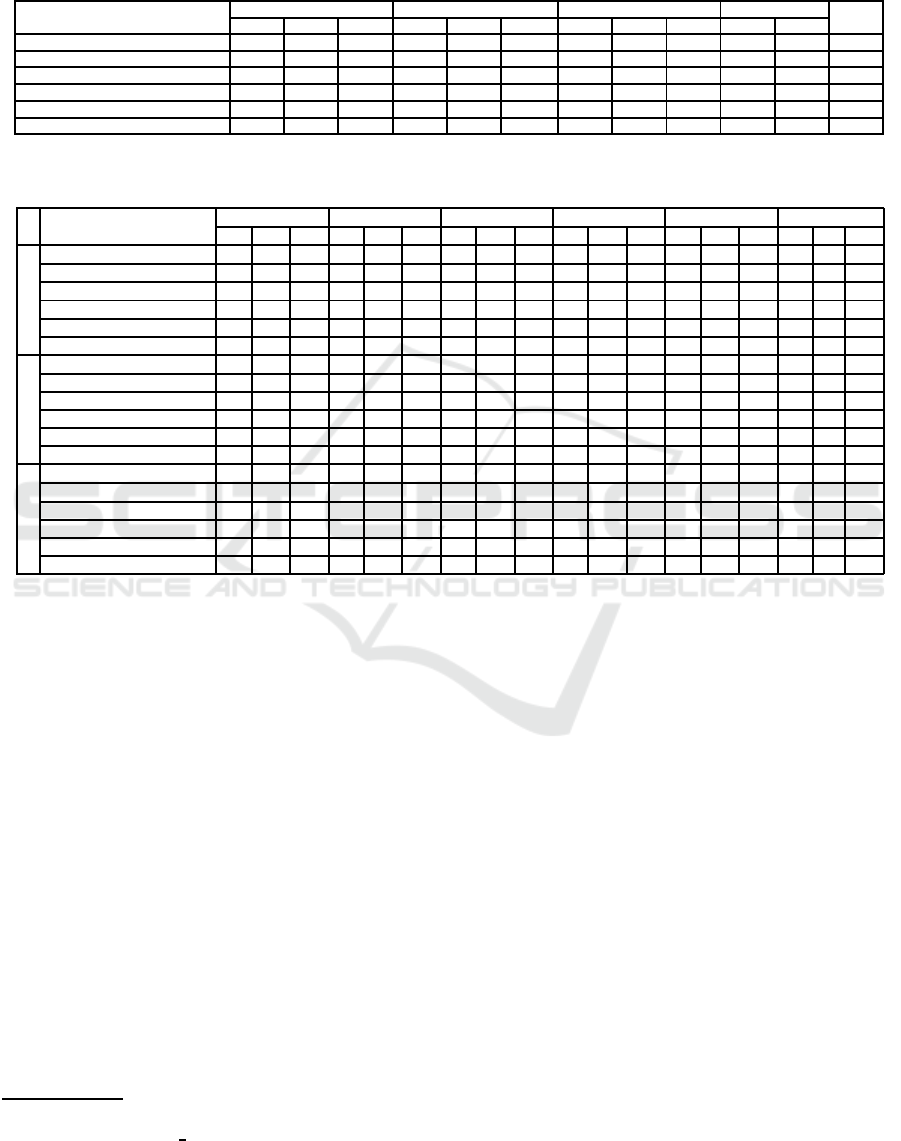
Table 2: Ranking results of the target models, The per-accuracy and per-robustness averaged ranks are denoted as Acc and
Rub, respectively. The average ranking per experiment is denoted as Avg. and the average column contains accuracy and
robustness over all the experiments followed and the total rank column reports the overall average performance in regard to
accuracy and robustness. Red indicates the best performance, green represents the second best and the blue highlights the
third best.
Target Model
Baseline Initialization perturbation Gray-scale Average Total
Acc Rub Avg. Acc Rub Avg. Acc Rub Avg. Acc Rub Rank
RGB-LSN 18.71 16.51 17.6 16.31 17.84 17.08 20.17 18.07 19.12 18.39 17.48 17.93
RGB-LBP 17.32 20.24 18.78 16.49 17.10 16.79 18.58 17.98 18.28 17.47 18.44 17.95
RGB-OG 17.08 20.05 18.56 16.97 17.97 17.47 18.01 19.23 18.62 17.36 19.08 18.22
RGB 19.05 16.43 17.74 16.13 16.70 16.41 22.39 23.26 22.83 19.19 18.80 18.99
RGB-LBP5 (Ning et al., 2009) 22.99 19.49 21.24 20.23 18.68 19.46 21.94 23.75 22.85 21.72 20.64 21.18
RGB-LSN5 (Tavakoli et al., 2013) 30.25 21.50 25.88 27.99 20.98 24.49 26.33 28.16 27.25 28.19 23.54 25.87
Table 3: Detailed performance of the models in each visual attribute in terms of overlap (accuracy) and failures (robustness).
The rank indicates the average ranking considering both accuracy rank and robustness rank.
Target Model
Camera motion Illumination change Occlusion Size/scale change Motion change non-degraded
Over Fail Rank Over Fail Rank Over Fail Rank Over Fail Rank Over Fail Rank Over Fail Rank
RGB-LSN 0.55 18.00 19.32 0.39 5.00 28.28 0.58 2.00 15.87 0.43 1.00 11.66 0.57 13.00 18.59 0.68 0.00 11.95
Baseline
RGB-LBP 0.55 22.00 21.82 0.39 3.00 25.31 0.60 4.00 18.26 0.45 4.00 14.89 0.57 12.00 20.46 0.68 0.00 11.95
RGB-OG 0.56 21.00 18.98 0.41 3.00 24.02 0.61 3.00 14.11 0.45 7.00 18.13 0.56 14.00 21.5 0.69 0.00 12.00
RGB 0.55 16.00 18.43 0.39 4.00 25.25 0.59 2.00 14.62 0.42 2.00 14.79 0.55 10.00 19.91 0.67 0.00 13.00
RGB-LSN5 (Tavakoli et al., 2013) 0.50 16.00 22.72 0.36 7.00 28.00 0.35 7.00 28.19 0.38 8.00 19.00 0.47 26.00 25.59 0.33 2.00 31.75
RGB-LBP5 (Ning et al., 2009) 0.55 13.00 17.6 0.41 4.00 25.75 0.51 3.00 21.86 0.41 6.00 13.7 0.55 16.00 20.54 0.44 1.00 27.96
RGB-LSN 0.53 19.07 17.57 0.38 4.47 26.36 0.55 2.67 16.56 0.42 4.53 14.25 0.53 14.07 17.82 0.65 0.00 9.92
Init Perturb
RGB-LBP 0.52 20.60 18.67 0.39 3.80 25.75 0.55 3.20 16.75 0.43 3.00 10.92 0.53 12.40 17.79 0.64 0.00 10.90
RGB-OG 0.52 19.47 19.99 0.39 2.80 24.00 0.57 2.80 14.31 0.43 6.07 14.70 0.52 12.67 19.35 0.63 0.00 12.50
RGB 0.52 16.80 17.77 0.38 4.20 26.09 0.57 2.33 13.44 0.43 3.40 13.04 0.52 12.13 18.17 0.64 0.00 10.00
RGB-LSN5 (Tavakoli et al., 2013) 0.51 18.47 20.54 0.39 7.47 27.88 0.39 5.87 24.00 0.38 8.47 18.75 0.48 27.13 24.73 0.30 2.93 31.00
RGB-LBP5 (Ning et al., 2009) 0.54 14.33 14.78 0.40 4.33 25.36 0.50 2.60 20.17 0.42 6.07 10.54 0.53 17.07 17.38 0.42 1.60 28.50
RGB-LSN 0.50 37.00 20.19 0.35 7.00 24.57 0.60 4.00 16.21 0.39 9.00 20.04 0.47 20.00 20.15 0.62 0.00 13.59
Gray-scale
RGB-LBP 0.52 44.00 20.48 0.39 3.80 24.32 0.55 3.20 14.24 0.43 3.00 14.41 0.53 12.40 21.50 0.64 0.00 14.75
RGB-OG 0.50 46.00 20.47 0.36 7.00 23.57 0.60 3.00 19.42 0.43 10.00 14.45 0.47 24.00 20.92 0.61 0.00 10.92
RGB 0.47 53.00 25.09 0.35 11.00 27.75 0.55 5.00 17.17 0.39 10.00 20.65 0.45 26.00 24.38 0.60 1.00 21.92
RGB-LSN5 (Tavakoli et al., 2013) 0.47 50.00 26.38 0.37 11.00 25.47 0.36 21.00 28.29 0.37 23.00 27.34 0.45 46.00 28.00 0.33 3.00 28.00
RGB-LBP5 (Ning et al., 2009) 0.49 44.00 22.42 0.41 7.00 22.00 0.38 11.00 22.77 0.40 15.00 21.15 0.49 37.00 23.50 0.35 1.00 25.25
lenge algorithms
2
, though we only report the mod-
els of our interest. (Please check the supplement for
the ranking in conjunction with the algorithms in the
challenge.) Surprisingly, we learn that the target rep-
resentation models of RGB-LBP5 (Ning et al., 2009)
and RGB-LSN5 (Tavakoli et al., 2013) does not per-
form better than the original RGB target model in
terms of accuracy and robustness. The same conclu-
sion can be inferred in terms of convergence rate as
reported in Table 1. We credit the finding to the lim-
ited number of test sequences in (Ning et al., 2009;
Tavakoli et al., 2013) which could have affected the
understanding about the models behavior and perfor-
mance. It is worth noting that both methods are re-
ported having good performance on tracking small
targets on difficult backgrounds; however, a small
number of VOT sequences have such a characteristic.
In order to understand the behavior of each target
model better, we analyze their ranking performance
in the six visual attributes a frame can be associated
with. The result is reported in Table 3. There is no
2
The VOT2013 results were obtained from: http://
box.vicos.si/vot/vot2013 results.zip
single model that performs the best in all categories.
In the presence of camera motion, RGB-LBP5 (Ning
et al., 2009) performs best during the first two exper-
iments (i.e., baseline and initialization perturbation)
by having less failures, but it is replaced by RGB-
LSN for the gray-scale experiment. In the illumi-
nation change circumstance, the target model using
oriented gradient and RGB features outperform other
representations in the first two experiments; these fea-
tures are also the best in the case of occlusions dur-
ing baseline experiment. The RGB-LBP model is the
foremost model in the case of size change in the pres-
ence gray-scale input. It is, however, outperformed
by RGB-LSN model for the baseline experiment. The
RGB-LSN model performs the best in the presence of
motion change and non-degraded sequences by hav-
ing high overlap and low failure rate. The RGB-LSN
has an above average performance in all the circum-
stances, which results in a winning overall ranking
verdict in VOT 2013 experiments.
An interesting observation is that the RGB model
often has an average or above average performance
on most of the sequences during the baseline and
initialization perturbation. This indicates that poten-
VISAPP 2016 - International Conference on Computer Vision Theory and Applications
20

tially the RGB model can be enough for many tasks
when color information is present. To assess this hy-
potheses, we reordered the model ranking based on
baseline and initialization perturbation results: RGB
(17.08) > RGB-LSN (17.34) > RGB-LBP (17.79) >
RGB-OG (18.13) > RGB-LBP5 (20.35) > RGB-
LSN5 (25.18). It is clearly obvious that dropping
the requirement for gray-scale handling an RGB tar-
get model is enough to perform better than any other
model.
5 CONCLUSION AND
DISCUSSION
“How well does mean-shift algorithm benefit from
saliency-based target representation?”
Despite we demonstrated that RGB model is suf-
ficient for many cases, the answer is not a straight
forward yes/no. In fact, the choice of target model
is dependent on the application, target characteristic
and sensor. We must however assert that RGB-LSN
has slightly the edge over RGB since it also handles
the gray-scale input properly. Otherwise putting the
gray-scale input aside, we can interpret that the con-
tribution of the combination of various features with
RGB is often marginal and most probably not needed.
It may be questioned about the reason why the
findings in this study may differ from those papers
which proposed the application of various features
with RGB for target modeling. The reason most prob-
ably lies on the use of limited number of test se-
quences and target specific (e.g., tracking a particu-
lar object) applications which affects the understand-
ing about the general behavior of the model. A sim-
ilar phenomenon is often observed in the evaluation
of saliency-based trackers which casts a shadow on
their true strength and motivates a careful study of
saliency based algorithms and methods. This issue
goes outside the span of the current paper and will be
addressed in the future work.
It is also worth noting that relying solely on the av-
erage ranking results of a benchmark is not necessar-
ily wise and a closer look to the underlying scores are
needed. This becomes important in choosing the ap-
propriate algorithm and target model for a specific ap-
plication since the overall score can be easily skewed
and be misleading.
ACKNOWLEDGEMENTS
Hamed R.-Tavakoli and Jorma Laaksonen were sup-
ported by The Academy of Finland under the Finnish
Center of Excellence in Computational Inference Re-
search (COIN).
REFERENCES
Borji, A., Frintrop, S., Sihite, D., and Itti, L. (2012). Adap-
tive object tracking by learning background context.
In CVPRW, pages 23–30.
Comaniciu, D., Ramesh, V., and Meer, P. (2003). Kernel-
based object tracking. IEEE Trans. Pattern Anal.
Mach. Intell., 25(5):564–577.
Dalal, N. and Triggs, B. (2005). Histograms of oriented
gradients for human detection. In CVPR, volume 1,
pages 886–893 vol. 1.
Frintrop, S. and Kessel, M. (2009). Most salient region
tracking. In ICRA.
Fukunaga, K. and Hostetler, L. (1975). The estimation
of the gradient of a density function, with applica-
tions in pattern recognition. IEEE Trans. Inf. Theory,
21(1):32–40.
Kristan, M., Pflugfelder, R., Leonardis, A., Matas, J.,
Porikli, F., Cehovin, L., Nebehay, G., Fernandez, G.,
Vojir, T., Gatt, A., Khajenezhad, A., Salahledin, A.,
Soltani-Farani, A., Zarezade, A., Petrosino, A., Mil-
ton, A., Bozorgtabar, B., Li, B., Chan, C. S., Heng, C.,
Ward, D., Kearney, D., Monekosso, D., Karaimer, H.,
Rabiee, H., Zhu, J., Gao, J., Xiao, J., Zhang, J., Xing,
J., Huang, K., Lebeda, K., Cao, L., Maresca, M., Lim,
M. K., El Helw, M., Felsberg, M., Remagnino, P.,
Bowden, R., Goecke, R., Stolkin, R., Lim, S., Ma-
her, S., Poullot, S., Wong, S., Satoh, S., Chen, W., Hu,
W., Zhang, X., Li, Y., and Niu, Z. (2013). The visual
object tracking vot2013 challenge results. In ICCVW,
pages 98–111.
Ning, J., Zhang, L., Zhang, D., and Wu, C. (2009). Robust
object tracking using joint color-texture histogram. In-
ternational Journal of Pattern Recognition and Artifi-
cial Intelligence, 23(07):1245–1263.
Ojala, T., Pietik¨ainen, M., and M¨aenp¨a¨a, T. (2002). Mul-
tiresolution gray-scale and rotation invariant texture
classification with local binary patterns. IEEE Trans.
Pattern Anal. Mach. Intell., 24(7):971–987.
Plataniotis, K. N. and Venetsanopoulos, A. N. (2000). Color
Image Processing and Applications. Springer-Verlag
New York, Inc., New York, NY, USA.
Tavakoli, H. and Moin, M. (2010). Mean-shift video track-
ing using color-lsn histogram. In Telecommunications
(IST), 2010 5th International Symposium on, pages
812–816.
Tavakoli, H. R., Moin, M. S., and Heikkila, J. (2013). Local
similarity number and its application to object track-
ing. Int J Adv Robot Syst, 10(184):1–6.
Yilmaz, A., Javed, O., and Shah, M. (2006). Object track-
ing: A survey. ACM Computing Surveys, 38(14).
On the Contribution of Saliency in Visual Tracking
21
