
Substantiation of the Required World Model Configuration for
Autonomous Mobile Medical Service Robots
Dmitry Rogatkin, Liudmila Lapaeva and Denis Lapitan
Moscow Regional Research and Clinical Institute “MONIKI” named after M.F.Vladimirskiy, 61/2 Shepkina str., 129110,
Moscow, Russian Federation
Keywords: Medicine, Service, Mobile Robot, World Model, Concept, Requirements, Artificial Intelligence.
Abstract: Development of smart mobile service medical robots is the actual and interesting problem in the modern
biomedical instrumentation. This study is aimed at development of the theoretical basis of the modern
medical robotics, in particular, of the theory of autonomous mobile service medical robots. Based on the
expert analysis of typical scenarios of behaviour of service medical robots in clinics, the necessity of
development of reasoning-based robots with built-in world model was substantiated. It was shown, that the
development of the world model should be the key start point of all the process of development and design
of such robots. General technical requirements for the robot’s world model, for its composition and
functionality, were formulated. It was shown also, that the world model of such robots must maintain a
database of precedents of various events and must work taking into account both embedded instincts of the
robots and general rules of the World.
1 INTRODUCTION
One of the sections of the contemporary robotics is
medical robots, and in particular – autonomous
mobile service medical robots (AMSMR) (Butter et
al., 2008; Wang et al., 2006; Rogatkin et al., 2013).
The first AMSMR named ”AMS-car” appeared in
the middle 1970s in the Fairfax hospital (USA) to
move containers with food trays for patients. From
this moment, the idea of introduction of AMSMRs
into the health care system has been flying up in the
air, because there was a great need in medicine for
diligent and exact implementation of plenty of
different routine transport, information, and other
auxiliary service procedures. Today, there are
hundreds of articles in journals as well as in Internet
devoted to different AMSMR including one of the
first projects – «HelpMate» – the project of the
transport service robot for delivery of different
drugs, analyses, materials, and documents inside a
hospital (Evans, 1994). Also, it is well-known the
Russian robot «R-Bot» for telepresence in hospitals
(http://www.plasticpals.com/?p=26770); the project
of remote-presence medical robots «RP-7» and «RP-
8» – information robot-manipulators allowing oral
and visual communication of physician with a
patient from any point of the Globe (Wang et al.,
2006), and a number of other similar projects. The
last generation of the “RP” robot family – robots of
the “RP-VITA” series – was approved in 2013 by
FDA, and its invasion into clinics was really started
(see in http://www.intouchhealth.com/products-and-
services/products). Robots “RP-VITA” can move
themselves round the clinic territory, find up the
room of interest and a patient’s bed without human
participation. A doctor must only point out the aim
for the robot by pressing the corresponding button.
However, the majority of publications about all
these projects in different conference proceedings as
well as in Internet have neither scientific nor
engineer or technical features. They are of only
advertising (demonstrational) character in the vast
majority of the publications. They describe different
robot resources and demonstrative examples of its
usage without detailed and systemic technical
description of concrete scenarios and algorithms of
the robots’ behaviour in clinics, without their target
functions, without general fundamental regularities
and (or) scientific background for development and
design of both hardware and software for such
robots. Meanwhile, in reality, AMSMR is an
automatic, electronic, and mechanical medical
equipment. Therefore, both the general system of
medico-technical requirements according to existing
Rogatkin, D., Lapaeva, L. and Lapitan, D.
Substantiation of the Required World Model Configuration for Autonomous Mobile Medical Service Robots.
DOI: 10.5220/0005650801250130
In Proceedings of the 9th International Joint Conference on Biomedical Engineering Systems and Technologies (BIOSTEC 2016) - Volume 1: BIODEVICES, pages 125-130
ISBN: 978-989-758-170-0
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
125

standards and specialized demands, for example, for
design of software exclusively specific for medical
applications, in some degree or other, must be
applied to AMSMR. Thus, there is an obvious gap in
the engineer theoretical background for AMSMR.
Undoubtedly, during past several years, the
theory of service robots for different fields of human
activity including medicine became already an
object of investigations (Fiorini et al., 2013;
Rogatkin et al., 2013; Towle et al., 2014), though
quite recently the majority of classical monographs
on robotics (Young, 1979, for example) didn’t refer
to such studies. Voluminous articles and books on
this subject described particular problems of
construction of mechanical manipulators and (or)
clamps, sensors, elements of mobile parts of the
robot, and so on, but had none of the general
theoretic problems of software elaboration for
autonomous mobile service robots, especially for
medicine. Only since recently, a special attention is
paid to fundamental scientific mechanisms of the
software development for service robots (Iborra et
al., 2009; Somby et al., 2009; Towle et al., 2014).
But, in the first place, it still concerns the design of
the specialized software (ROS, Microsoft Robotics
Studio, Skilligent) for developers and development
of additional languages for high level programming
in robotics (LABVIEW Robotics Module, for
example). Until now, really smart AMSMR don’t
exist in our hospitals due to the complex problem of
creation of intelligent machines. Today, there aren’t
general methodical manuals and rules for engineers
how to create them. What should be done as the first
step on this way? Should we create a hardware or a
software first? In fact, this situation is preventing the
worldwide adoption of robots as efficient service
machines (Mastrogiovanni and Chong, 2013). For
overcoming this situation, the real integration
between techniques of artificial intelligence and a
practical robotics should be reached.
The main objective of our theoretical study is the
investigation and elaboration of general scientific
approaches to the formal engineer description of the
problem of AMSMR projecting and development, in
particular – a formulation of scientifically grounded
demands to the software for AMSMR. Firstly, in the
section 2 of the present article, the basic concept
(scenario) of AMSMR functioning in clinics is
considered. In robotics research, in the general case,
a formation of a scenario of a robot behaviour is not
a novel clime. But for AMSMR we don’t know such
concept and results, which have been published and
accepted by all. Secondly, we analyze the results of
the proposed concept and formulate a number of its
consequences. The main one - the generalized task
of clinical AMSMR functioning is a finite task,
limited (restricted) both in physical building space
and in a space of possible decisions and actions, and
is of the closed type, i.е. all possible situations and a
spectrum of various methods of their resolution can
be exhaustively described in the closed form.
Another important consequence – only smart,
intelligent AMSMR can follow the scenario in a full
scale. So, AMSMR should have in its “brain” a full-
scale World Model (WM), containing all necessary
information about each object as well as about each
possible situation in the robot’s World. Formation of
the internal WM of the “reasoning-based” AMSMR
as the key element of its software is discussed in the
section 3. Needed WM configuration and its
functionality are substantiated there, as well. All
these gives the answer on the question about the
order of the AMSMR development and design.
2 CONCEPT OF AMSMR
FUNCTIONING IN HOSPITALS
At the initial stage of our study, we interviewed
physicians and patients of different departments of
the multi-clinical and multi-functional medical
research centre “MONIKI” and received the verbal
description of the most prospective AMSMR
applications in the health care system (from the
point of view of both physicians and patients). Then,
all results of these interviews were classified,
generalized, and analyzed by the method of the
expert assessment. On the basis of the outcome, in
addition to the telepresence (remote-presence)
function, which is often mentioned in publications as
the main useful function for AMSMR, the following
important and prospective tasks were also
determined which are very interesting to solve and
which can be solved with the help of AMSMR in
real clinical practice:
- interactive lecture-excursion (10-15 minutes)
for patients at the moment of admission to the
hospital about daily routine in it, about building plan
(wards, shower-bath, dining-room, etc.), therapy
regimen, feeding, walking in the air, etc.;
- information of patients about the time of
diagnostic and (or) treatment procedures, repeated
reminding about it 15-20 minutes before the fixed
time in the concrete day;
- searching within the clinics for a given patient,
physician, or a nurse to inform them about concrete
instructions, problems, including the urgent ones;
BIODEVICES 2016 - 9th International Conference on Biomedical Electronics and Devices
126
- delivery of drugs and medical materials to
patients in their wards;
- delivery of food to the bed patients, removal of
waste and scrap products of them;
- listening (recording) to requirements and
complaints of patients and passing these information
to medical personnel;
- a series of other similar informational,
searching, and (or) transport tasks.
These functional duties of AMSMR (service and
assistant functions) appeared to be common for the
majority of departments of the multi-functional
medical centre, and, consequently, they are typical
to every medical institution of the health care
system. Moreover, it becomes clear from the list
above mentioned, that the vast majority of
prospective scenarios of AMSMR behaviour is
associated with a transport as well as with
information-searching tasks within the limits of the
room-type territory. Shortly speaking, AMSMRs are
needed in hospitals to implement quite compact and
rather unified set of simple instructions, such as: to
implement different errands associated with seeking
an object of interest, interaction with different
objects, delivery of objects, receiving and storage
information from people, information processing
and transmission to other people.
It makes the generalized task of AMSMR
functioning a finite one, limited (restricted) both in
physical building space and in the space of possible
decisions and actions, and of the closed type, i.е. all
possible situations and a spectrum of methods of
their resolution can be described exhaustively in the
closed form. It allows us to create an abstracted and
strictly formalized description of the generalized
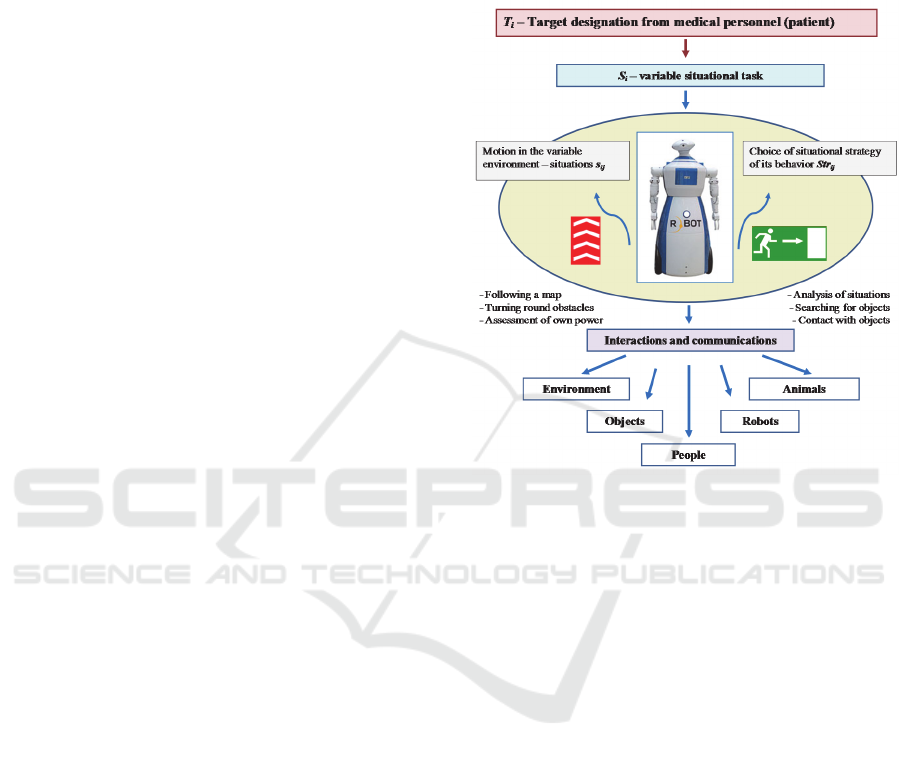
concept of AMSMR functioning in hospitals (Fig.1):
All tasks should be resolved by AMSMR
algorithmically at the expense of its moving through
the room-type territory to search for and then to
contact with external objects (physician, patient,
medical equipment, furniture, etc.), which all are
programmed inside its WM as a set of variables for
identification and communication. The robot moves
around a clinic in order to solve the concrete task Т
i
,
which is put before it by an external operator
(physician or a patient). Various situations S
i
rise up
during the robot motion including urgent ones (for
example, a primary passage is blocked by an
obstacle) which should be solved by AMSMR itself,
without any operator participations. Also, AMSMR
must be able to put and to solve intermediate
situational tasks and subtasks t
ij
, to create a
situational behavioural strategy Str
ij
, as well as to
formulate its own situational target functions Q
ij
with special particular purposes (going round the
obstacle, accumulator recharging, etc.). And only in
the absolute insoluble situation the robot should stop
completely and give an alarm signal of calamity
(feebleness).
Figure 1: Generalized concept of AMSMR functioning in
hospitals.
This general concept shows, that AMSMR must
operate with various objects and terms (territory,
room, passage, obstacle) in a complex environment,
must “understand” both the regularities of mutual
positions of these objects and possible changes in
their locations in the space of clinics, as well as must
take into account the logic and the history of such
changes, providing a semantically meaningful
interpretation of all these object interactions and a
motion within a scene, especially if one of the
participants within the scene is a man. Therefore,
only smart, intelligent AMSMR can follow the
scenario in a full scale; and the key element of
AMSMR should be the full-scale WM in its “brain”,
containing all necessary information about each
object as well as about each possible situation in the
robot’s World.
Today a number of approaches is known to
formation of such WM for autonomous mobile
robots (Roth et al., 2003; Burgard et al., 2008;
Elfring et al., 2013). However, the overwhelming
majority of such WM are de-facto a simple
geometrical description of the territory map and
objects location in the indoor environment
(Kułakowski et al., 2010). They describe statistical
Substantiation of the Required World Model Configuration for Autonomous Mobile Medical Service Robots
127

panorama (situation) of the territory, but tell nothing
of the history, logic, and the possible ways of this
situation development with time. Such WM are,
definitely, needed, but it is only one of the elements
of the really required, full-scale, effective and
workable WM for AMSMR.
Some publications (Burgard et al., 2008; Elfring
et al., 2013)) indicate that a set of special semantic
attributes of the objects describing sense (semantic)
associations between all objects are needed to create
WM of full workable. To our opinion, WM
presented by B. Coltin et al (Coltin et al., 2010), is
the most similar to the real required WM for “smart”
AMSMR. It offers a modelling approach that
differentiates among the motion models of different
objects in terms of their dynamics, namely the static
landmarks (e.g., goal posts, lines, corners), the
passive moving ball, and the controlled moving
robots, both teammates and adversaries. In their
article WM is a tuple {O, X, S, M, H, U}, where: O
is the set of labels of objects in the World, X is the
set of possible object states, S is the set of possible
sensor readings, M is the set of models of the
objects, H: MxO→X is a hypothesis function that
returns the current state of an object, U: MxOxS→M
is the model update function. Perception of the state
of the World by the robot with such WM is the most
complete today, but, unfortunately, this WM is
restricted by the objects of the football playing
situation only. It is based on the concrete football-
game data of robot’s sensors (tuple S), and,
therefore, it is not widely applicable for the more
general types of robots, for AMSMR, for example.
3 GENERAL CONCEPT OF THE
FULL-SCALE WM FOR
AMSMR
In our study, the general concept of the object-
oriented WM is being elaborated for AMSMR. It is
based on the abstraction from the concrete hardware
of AMSMR and underlain by an assumption that all
sensor organs of the ideal AMSMR as well as its
object-recognition system allow separating from the
information entering AMSMR sensors all necessary
object identification signs installed within WM
about the objects being observed. This, in its turn,
enables exact identification of all objects by the
robot, i.e. AMSMR is assumed to have ideal sensors
and perfect object-recognition systems. How do the
sense organs and the object-recognition systems
work – it is a question beyond the concept under
consideration, because only general fundamental
principles of the “high level” WM functioning are an
important subject of our investigation without
detailing of how the sensor system and the object-
recognition one works.
To make it simpler, the first stage of our study
was restricted by a static description of the WM of
2D space. The general regularities of situational
location of the robot and external objects in
environment as well as general rules of their
possible associations and an interrelationship were
studied. It was shown that such a task for AMSMR
requires formation of reasoning in the robot’s
“mind”. The robot is to act on the basis of situational
cases and extrapolation of a situation development.
According to classification, such a robot is attributed
to intellectual dynamic systems acting situationally
in multi-agent surroundings based on adaptive logic
reasoning and precedents (reasoning-based adaptive
AMSMR). Therefore, formulizing causal rules of the
World within the frames of the logic of the 1
st
order
predicates calculation is necessary for the “smart”
robot WM, with regard to the time and modality
factors (temporal and modal logics). In addition, a
list of environmental objects and its properties, as
well as the knowledge of the intra-environment
behaviour of them, definition of the dictionary of
predicates, functions, constants, and a database of
typical situational tasks in the environment are
required. The block of prognosis and planning of
situation development should be one of the blocks of
WM functionalizing, as well. Shortly, WM of
AMSMR, in the general case, should involve not
only a structuralized set of categories (objects) of the
environment and their characteristics but also should
involve the means of description of the possible
semantic associations between all objects, their
possible interrelations, rules of such interrelations.
All these determine the needed structure of WM
(Table 1). It must include, in addition to models of
external objects (rooms, furniture, medical
equipment, etc.), some general non-object and
procedural (functional, semantic, etc.) terms: way
(distance, trajectory), direction, motion, danger, to
be present, to search for, to find, to implement,
cause, quantity, etc. It distinguishes our full-scale
WM from WM of other authors. In our WM, the
general relations and kindred associations between
objects are also determined: faster/slower,
part/whole, friendly/alien, etc. Based on these terms,
the basic rules and relations in the World are
formulated.
As it was shown, all rules (regulations) existing
in WM can be conditionally divided in 2 categories.
BIODEVICES 2016 - 9th International Conference on Biomedical Electronics and Devices
128

Table 1: World model composition.
General World regulations and rules independent of
the concrete robot environment (general philosophic
regulations of the world) can be attributed to the first
category. To the second category attributed are laws
and rules currently in force for the given concrete
environment (clinic) and for the given concrete robot
design. All these rules may be formulated as the
sense logical statements (predicates) as follows:
1. There is a closed-type set of non-crossing
concepts (terms) in the world: object, property, rule,
quantity, cause, consequence, time, space, etc.
2. Any task or situation in the World can be
described using these concepts.
3. In the World there are many external objects,
characterized by different sets of its properties,
which can be detected by sensors (sense organs).
4. Objects of the World can be simple and
complex (consisting of other objects).
5. There is a basic set of strong (non-changing)
rules and restrictions in the World.
6. The life goes on in the environment
determined by the territory map.
7. Each existing object has its own location in the
environment.
8. There is a single location for each object in the
given moment of time.
9. Two different objects cannot be located in one
place in the given moment of time.
10. It is impossible to return back in time.
Such system of knowledge and rules enables
description of WM in the most natural way for the
human beings. In total, the set of the object models
and the world rules must allow description of all
typical situations (scenes) possible in the chosen
environment. The sequence of scene sets organized
in time must allow modelling possible situations,
predicting and planning the robot behaviour.
The AMSMR model itself is, also, an important
element of WM. It allows a robot to determine itself
as an element (object) of the World able to move,
communicate with other objects, and simultaneously
(in a certain way) as a special “subject” of the
World, which means impossibility to ordinary
communicate with itself (with the object “I am”) like
with other objects. For example, it is impossible to
search for itself. The latter requires the presence in
WM several models of the robot’s “physical” and
“analytical” opportunities. The important and
necessary element characterizing WM of AMSMR
is an interface of a target designation, i.е. the “robot-
physician” interface, which allows to realize all
information interchanges with physicians and to
perceive from them all orders for implementation.
However, the given model tells nothing yet about
motives of the robot activity. It isn’t locked in the
sense of the absence of the tasks for the robot. For
efficient AMSMR functioning, a target designation
or other motive for its activity is required. But it is
well-known, that the task of the target designation
cannot be solved today in a frame of the artificial
intelligence theory (Russel et al., 1995, 2003).
Therefore, it has to be solved additionally by
formulation or determination of the external tasks
and external motivations for the robot activity
(motivation from “outside”). In this case, all
motivations should be ranged by priorities to
exclude indefiniteness in the case of multitask
situations. In our project, we offer the following
postulate as a rule for any action motivation: the
robot acts according to the “instincts” programmed
within it. The example of instincts (with priority
diminishing) may be as follows:
- instinct of saving the human being (avoiding
collision, warning about danger)
- instinct of self-preservation (avoiding collision,
falling down, overheating, etc.);
- instinct of hunger (taking urgent steps to satisfy
the hunger when batteries are discharged);
- fear of the unknown situations (avoiding
situation non-modulated within the given WM);
- instinct of execution of the target designation:
to act in the case of the target designation from a
WorldModel
Model of objects
Modelofenvironment:
‐territory(rooms,passages)
‐items(furniture,devices)
‐otherdwellers(people,robots)
‐feedingzone(theplaceforrecharging
accumulators)
‐……..
Modelofitselfasanobject:
‐overalldimensions
‐sensorsofexternalobjects
‐sensor(s)ofadanger
‐sensorsofamotionvelocity
Modeloftargetdesignator
(robot‐physicianinterface)
General non-object (subjective) and procedural terms:
way,trajectory,direction,motion,turninground,tostop,danger,tobepresent,tofind,
objective,toreach,time,cause,quantity……
Typical situations (scenes) in the given environment:
‐tostandwithoutanymotion
‐amotionthroughthepassage
‐collision
‐……………
Model (possible) scenarios of behavior - precedents:
‐turningroundtheobstacle;
‐searchingfortheitem;
‐………………………
Relations (kindred and functional associations, comparisons):
Part/thewhole;more/less;friendly/alien;initial/terminal(final)…….
Rules of the World
Therulesforthegivenenvironmentand
givenrobot:
‐motionrules(brakeway,etc)
‐actionrulesatdanger
‐routineoftheday(schedule)
‐………………………..
GeneralrulesoftheWorld:
‐impossibletomovebackintime
‐impossibletopassthroughthewall
‐thereisapassagebetweenrooms
‐…………………..
Substantiation of the Required World Model Configuration for Autonomous Mobile Medical Service Robots
129

doctor or a patient;
- instinct of “laziness” (to act if a motive is
present; otherwise, to return home and “sleep”) – a
condition for “locking” the general task of the
AMSMR functioning. Here, the “home” is the place
for charging batteries.
The last instinct is the main procedure for the
AMSMR to act. It determines the main loop of the
robot’s activity in its software.
4 CONCLUSIONS
We have tried in our study to develop the new,
formal and scientifically based engineer approach
for soundness of technical requirements to AMSMR
“from the first principles”. The expert analysis of the
basic scenarios of AMSMR behaviour in clinics
enabled classification of such robots as intellectual
dynamic systems acting according to a situation in a
multi-agent environment and basing on adaptive
logical reasoning. AMSMR are expected in clinics
to implement different errands associated, mainly,
with seeking an object of interest, interaction with it,
receiving and storage information from people,
information processing and transmission to other
people. As it was shown in the study, to follow the
scenario in a full-scale, such a robot must have well
developed model of our World – the World Model
(WM). Studying the principles of WM functioning
showed that WM should involve, in addition to the
models of all external objects, some general non-
object and procedural terms (to find, to be present, to
execute). Semantic relations between objects should
be also determined, as well as the basic world rules
(impossible to pass through the wall, etc.) should be
formulated. The model of AMSMR itself should
also be given in WM, and its behavioural instincts as
general motivations for a robot to act should be
formulated and determined, as well. It distinguishes
our WM from other ones. Correctness and efficiency
of the offered approach should be proved by further
experiments, but it is evidently now, that the first
and key step of AMSMR design and development is
the WM configuration design.
ACKNOWLEDGEMENTS
The reported study was funded by RFBR according
to the research project No. 14-08-01127.
REFERENCES
Burgard, W., Hebert, M., 2008. World modelling. In
Springer Handbook of Robotics, B. Siciliano and O.
Khatib eds. 853-869.Springer. Berlin.
Butter, M., Rensma, A., Boxel, J., et al., 2008. Robotics
for Healthcare. Final report of the study within
framework of the e-Health activities of the EU
Comission. EU Comission, DG Information Society.
Brussel.
Coltin, B., Liemhetcharat, S., Meriçli, Ç., Tay, J., Veloso,
M., 2010. Multi-humanoid world modelling in
standard platform robot soccer. In Proceedings of
2010 IEEE-RAS International Conference on
Humanoid Robots. Nashville. TN. USA.
Elfring, J.,Van den Dries, S., Van de Molengraft, M.,
Steinbuch, M., 2013. Semantic world modeling using
probabilistic multiple hypothesis anchoring. Robotics
and Autonomous Systems. 61(2). 95-105.
Evans, M.,1994. Helpmate: An autonomous mobile robot
courier for hospitals. In Proceedings of International
Conference on Intelligent Robots and Systems (IROS
'94). 1695-1700. Munich. Germany.
Fiorini, P., Botturi, D., 2008. Introducing service robotics
to the pharmaceutical industry. Intelligent Service
Robotics. 1(4). 267-280.
Iborra, A., Caceres, D.A., Ortiz, F.J., Franco, J.P.,Palma,
P. S., Alvarez, D., 2009. Design of service robots.
IEEE Robotics & Automation Magazine. 3. 24-33.
Kułakowski,K., Wąs, J., 2010. World Model for
Autonomous Mobile Robot - Formal Approach. In
Proceedings of 18th International Conference on
Intelligent Information Systems (IIS’2010). 37-45.
Poland.
Mastrogiovanni, F., Chong, N. Y., 2013. The need for a
research agenda in intelligent robotics. Inelligent
Service Robotics. 6. 1-3.
Rogatkin, D. A., Lapitan, D. G., Lapaeva, L. G., 2013.
Conception of the mobile autonomous service medical
robots. Biomeditcinskaya radio-elektronika
[Biomedical radioelectronics]. 5. 46-56. (in Russian).
Roth, M., Vail, D., Veloso, M., 2003. A real-time world
model for multi-robot teams with high-latency
communication. In Proceedings of IEEE/RSJ
International Conference on Intelligent Robots and
Systems. 2494–2499. Las Vegas. Nevada.
Russel, S., Norvig, P., 2003. Artificial Intelligence. A
Modern Approach. Prentice Hall, New Jersey, 2
nd
edition.
Somby, M., 2009. Software platforms for service robots.
Servo. 1. 50-60.
Towle Jr, B., Nicolescu, M., 2014. An auction behavior-
based robotic architecture for service robotics.
Intellegent Service Robotics. 7(3). 157-174.
Wang, Y., Butner, S., Darzi, A., 2006. The Developing
market for medical robotics.In Special issue “Medical
Robotics”. Ed. by T. Kanade, B. Davis and C.N.
Riviere, Proc. IEEE. 94(9). 1763-1771.
Young, J., 1979. Robotics. Butterworths. London.
BIODEVICES 2016 - 9th International Conference on Biomedical Electronics and Devices
130
