
Machine Learning with Dual Process Models
Bert Klauninger, Martin Unger and Horst Eidenberger
Institute for Interactive Media Systems, Vienna University of Technology, Vienna, Austria
Keywords:
Dual Process Model, Similarity Measures, Combined Similarity Measures, SVM Kernels, Predicative
Measurements, Quantitative Measurements.
Abstract:
Similarity measurement processes are a core part of most machine learning algorithms. Traditional approaches
focus on either taxonomic or thematic thinking. Psychological research suggests that a combination of both
is needed to model human-like similarity perception adequately. Such a combination is called a Similarity
Dual Process Model (DPM). This paper describes how to construct DPMs as a linear combination of existing
measures of similarity and distance. We use generalisation functions to convert distance into similarity. DPMs
are similar to kernel functions. Thus, they can be integrated into any machine learning algorithm that uses
kernel functions.Clearly, not all DPMs that can be formulated work equally well. Therefore we test classifica-
tion performance in a real-world task: the detection of pedestrians in images. We assume that DPMs are only
viable if they yield better classifiers than their constituting parts. In our experiments, we found DPM kernels
that matched the performance of conventional ones for our data set. Eventually, we provide a construction kit
to build such kernels to encourage further experiments in other application domains of machine learning.
1 INTRODUCTION
Similarity measurement processes are a core part of
most machine learning algorithms. Traditional ap-
proaches focus on either taxonomic (“A and B share
properties x, y and z”) or thematic (“A is similar to
B by value N”) thinking. Psychological research,
e.g. (Wisniewski and Bassok, 1999), suggests that a
combination of both is needed to adequately model
human-like similarity perception.
Any model combining those aspects is called a
Similarity Dual Process Model. The primary aim of
our work is to provide an implementation of the DPM
idea for computer vision. It should perform binary
classification and be adoptable to carry out other ma-
chine learning tasks like, for example, cluster analy-
sis, correlation and ranking.
The secondary aim of this work is to test DPMs in
real-world experiments. The selected scenario should
have intermediate applications, while still being sim-
ple enough to generate results within reasonable time.
The question for the experimental results is: Which
DPM performs best?
In the following section, we sketch the necessary
background. In particular, we explain taxonomic and
thematic thinking and the associated types of mea-
sures more deeply. Afterward, we turn to more tech-
nical aspects arising from the real-world task we se-
lected: the detection of pedestrians in images. It has
been chosen because of its interesting applications
and because various well-known feature extraction al-
gorithms already exist.
Section 4 describes our experimental setup and
the results we obtained. In section 5, we start with
a comparison to existing models and discuss the vi-
ability of DPMs. Next, we take a look at the effect
of using different generalisation functions and mea-
sures. At this point, we are able to list the DPMs that
performed best, thereby reaching our secondary goal.
Eventually, section 6 gives a conclusion and mentions
promising areas of further research.
2 BACKGROUND
2.1 Taxonomic vs. Thematic Thinking
Taxonomic thinking tries to identify common features
and differences between objects. The more com-
mon features can be identified, the larger the sim-
ilarity. Hence, taxonomic similarity assessment is
associated with predicate based similarity measures
(“counting”). Thematic thinking tries to find a theme
that connects the objects. This theme is then used for
comparison. This kind of reasoning is mostly associ-
148
Klauninger, B., Unger, M. and Eidenberger, H.
Machine Learning with Dual Process Models.
DOI: 10.5220/0005655901480153
In Proceedings of the 5th International Conference on Pattern Recognition Applications and Methods (ICPRAM 2016), pages 148-153
ISBN: 978-989-758-173-1
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

ated with metric distances (“measuring”).
Figure 1: Taxonomic and Thematic Thinking (cf. (Eiden-
berger, 2012, p. 540)).
Figure 1 tries to develop an intuitive understand-
ing with an example. The triangle on the left side is
the reference. We compare it to the two stimuli next to
it. If the focus lies on taxonomic thinking, the triangle
in the center is more similar to the reference, because
it also has three corners. If the focus lies on thematic
thinking, the square on the right is less different from
the reference, because it is similar in size.
To measure distance between two concepts, it is
often constructive to find a commonality first. We call
such concepts alignable. Highly alignable concepts
tend to lead to taxonomic thinking, because there are
enough common features to be able to make a com-
parison. Poorly alignable ones tend to lead to the-
matic thinking, because there are no common features
to even work with taxonomic thinking.
Depending on whether we measure or count, dif-
ferent measures are used for taxonomic and thematic
thinking. The dot product and the number of co-
occurrences are typical choices for taxonomic think-
ing. The city block distance and the Hamming dis-
tance (features that are in one object, but not the other)
are typical choices for thematic thinking.
Table 1: Properties of Taxonomic and Thematic Thinking
(cf. (Eidenberger, 2012, p. 537)).
Property Taxonomic Thematic
Stimuli Separable Integral
Concern Similarity Distance
Measurement Dot Product City Block Distance
Counting Co-Occurrences Hamming Distance
2.2 Generalisation
The relation between distances and similarities can be
formalised with generalisation functions. The higher
the difference between objects, the lower the proba-
bility of them belonging to the same class. Identical
objects should belong to the same class with a prob-
ability of p = 1. From this point, probability should
fall with similarity. How exactly it should fall, is still
being disputed.
Generalisation functions allow us to convert dis-
tance into similarity. This is an important part of
DPMs, because we need a way of combining similar-
ity and distance. Note that we deal with negative dis-
tances with a symmetry assumption to simplify dis-
tance measurements.
(a) Boxing. (b) Gaussian.
(c) Shepard. (d) Tenenbaum.
Figure 2: Different Generalisation Functions.
Figures 2a-2d show different generalisation func-
tions. The Tenenbaum function is considered the state
of the art.
2.3 The Dual Process Model
At first sight, the combination of both taxonomic and
thematic similarity assessment seems an unnecessary
complication. After all, both have been used on their
own in machine learning - mainly in models created
by computer scientists. Humans, however, do not
always use one or the other approach when making
similarity judgments. One experiment asked partici-
pants to rate the similarity of word pairs on a numeric
scale, e.g. (milk, coffee), (milk, lemonade), (milk,
cow) and (milk, horse). “As one would expect, sim-
ilarity ratings for pairs which were highly alignable
were reliably higher than for pairs which were poorly
alignable. However, contrary to present accounts of
similarity, ratings for pairs with preexisting thematic
relations were higher than for pairs without preex-
isting thematic relation.” (Wisniewski and Bassok,
1999, p. 216f)
s
d pm
= α s
taxonomic
+ (1 − α) g(d
thematic
) (1)
Equation 1 shows a simple linear DPM (Eiden-
berger, 2012, p. 540), s
d pm
being the total similar-
ity score; α, 0 ≤ α ≤ 1 the importance of taxonomic
thinking; s
taxonomic
the specific taxonomic measure
(similarity); g the generalisation function; d
thematic
the
specific thematic measure (distance).
The specific taxonomic measure, thematic mea-
sure and generalisation function to be plugged into
the equation are the reader’s decision. Note that, for
the rest of this work, we deal with linear combinations
of taxonomic and thematic thinking only.
Machine Learning with Dual Process Models
149

3 IMPLEMENTATION
Our implementation reads training images and gen-
erates feature vectors from them. Our features are
the Histogram of Gradients (HOG) (Dalal and Triggs,
2005), the MPEG-7 Edge Histogram (EHD) and the
Scalable Color Descriptor (SCD) (Sikora, 2001).
HOG divides images into parts and creates a his-
togram for each part. The histograms describe the
gradient orientations of each part which can be calcu-
lated from the horizontal and vertical gradients. For
EHD and SCD, the MPEG-7 reference implementa-
tion was used.
The aim of this work is not to come up with a new,
high-performing image detection algorithm. Rather,
the effect of using a DPM for measuring distance
in existing algorithms is examined. We selected the
HOG algorithm because it is representative for a line
of research called gradient-based algorithms. Empiri-
cal research suggests to combine HOG with other fea-
ture extraction methods to obtain a stronger algorithm
(Dollar et al., 2012, p. 10).
SCD and EHD from MPEG-7 provide this addi-
tional information to our implementation. Further-
more, turning these descriptor values into predicate
based data is straightforward. SCD and EHD do not
return predicates (i.e. zero/one values). To be able
to work with predicates, the values returned by SCD
and EHD are put into evenly sized bins by Algorithm
1. Note that the algorithm does something different
than creating a histogram. The output is an array of
values that are either zero or one.
Input: binSize size of one bin, minT smallest
possible value, binNum number of bins
to create, values array of values to be
binned
Output: binnedValues array of binned values
for i=0; i < values.size(); ++i do
for b = 0; b < binNum; ++b do
val = values.at(i);
if val ≥ minT + b · binSize & val <
minT + (b + 1) · binSize then
binnedValues[i · binNum + b]=1;
end
end
end
Algorithm 1: Transformation of Quantitative Val-
ues into Predicates.
HOG, in the version we use, is not scale-invariant,
while EHD and SCD are scale-invariant. Therefore
we have to resize our images to the correct size. Af-
ter this step, feature vectors are constructed in such
a way that the first N elements should be treated as
predicates, the remaining ones as distance measure-
ments. We train a modified Support Vector Machine
(SVM, (Joachims, 1998)) with the generated feature
vectors using a DPM kernel. This results in a SVM
model file containing the support vectors that create
an optimal separation of the training data.
The pedestrian detection part extracts the feature
vectors from the training set and uses the trained
SVM model to classify them. We use one of the
most straightforward methods for evaluating classi-
fier quality: the correct classification rate. More ad-
vanced evaluation measures (precision, recall, . . . )
exist. Their analysis was out of scope for this paper.
DPMs stipulate the use of quantitative and
predicate-based measures to represent taxonomic and
thematic thinking. We do not mandate which type
of measure to use for which type of thinking. We
can combine a quantitative measure for taxonomic
thinking with a predicate-based measure for thematic
thinking or we can use only quantitative or only
predicate-based measures.
4 TEST ENVIRONMENT
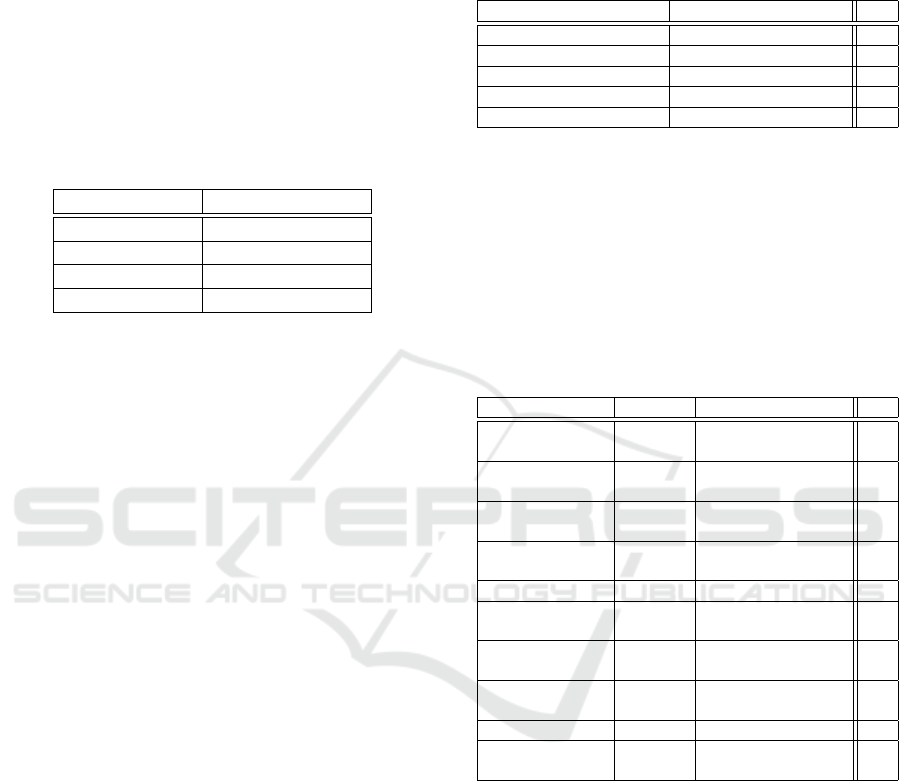
We selected the INRIA dataset
1
with upright images
of persons in everyday situations. The dataset is 970
MB large and contains thousands of images. Example
images are shown in Figures 3a and 3b.
Training was performed with 140 positive and 160
negative samples, testing with 50 positive and 50 neg-
ative images. During SVM training, the number of
allowed iterations without progress was restricted to
3000. We performed a manual classification into the-
matic and taxonomic measures. If there is a contrast
(i.e. x − y ,
x
y
,
a
.
,
.
−a
,
.
b
or
.
c
), then a measure is the-
matic and belongs on the right-hand side of Equation
1. Otherwise, it is taxonomic and belongs on the left-
hand side.
The importance of taxonomic thinking was set to
α =
1
2
during all experiments. This means we simu-
late a person that values taxonomic thinking as much
as thematic thinking. We ran pedestrian detection
with the described dataset for all combinations of
quantitative/predicate based measure/generalisation
function. In order to restrict the search space, only
predicate-based and quantitative measures were used
that were part of a purely predicate-based or purely
quantitative DPM that performed as good as the linear
kernel. To be able to compare our DPMs to the cur-
1
http://pascal.inrialpes.fr/data/human (last accessed
2015-02-24)
ICPRAM 2016 - International Conference on Pattern Recognition Applications and Methods
150
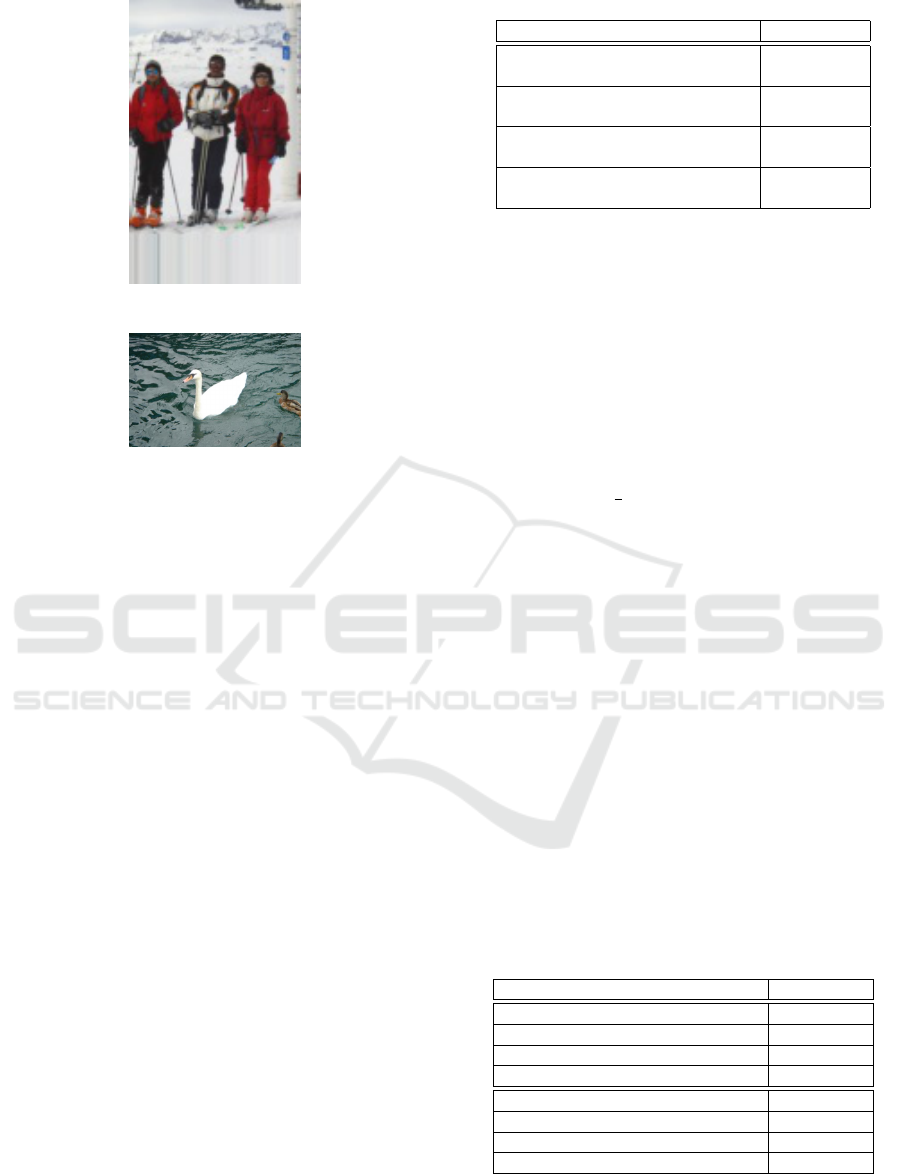
(a) Positive Example.
(b) Negative Example.
Figure 3: Examples From the Dataset.
rent state of the art, we also ran pedestrian detection
with the described dataset for the linear, polynomial,
sigmoid and radial kernels. Additionally, the thematic
and taxonomic parts of each DPM were used on their
own to classify the test data set.
Furthermore, we carried out five experiments with
selected DPMs and a larger dataset. This dataset con-
tained 2379 positive and 1231 negative training sam-
ples. Testing in this case was done with 900 samples.
Experiments which did not terminate during training
have been omitted from the result discussion.
5 EVALUATION
5.1 Viability of the Dual Process
Using a Dual Process Model adds complexity to any
machine learning task. Is the overhead worth it? We
compare the classification performance of each DPM
with its single process models, i.e. the taxonomic part
m
taxonomic
with the thematic part g(m
thematic
). The ag-
gregated results of this comparison are shown in Table
2. It was created by measuring the classification per-
formance of each possible DPM and comparing it to
the classification performances of the two single pro-
cess models that belong to it.
We can see in the first two lines that taxonomic
thinking on its own often performed better than the
thematic thinking on its own. This can be seen as a
clue that taxonomic thinking has a larger impact on
Table 2: Viability of DPMs.
Aspect % of Cases
Taxonomic Thinking Better 71.12
Than Thematic Thinking
Thematic Thinking Better 19.03
Than Taxonomic Thinking
Single Process Model Better 73.77
Than or Equal DPM (Not Viable)
Single Process Model Worse 26.23
Than DPM (Viable)
image detection performance than thematic thinking.
However, it is equally likely that this difference is
caused by the way we combined taxonomic and the-
matic thinking in our model or by the algorithm se-
lection for feature vector extraction.
The last two lines are more important. They tell us
that DPMs are not necessarily better than single pro-
cess models. In other words: Not every DPM created
with Equation 1 makes sense. In about 74% of the
search space, the classification performance has noth-
ing to gain from the use of a DPM with fixed impor-
tance factor α =
1
2
and might even decrease. There-
fore, when formulating a DPM, it is essential to verify
that it improves performance for the task at hand.
Let us call this performance improvement viabil-
ity. For the rest of the result discussion, we will
exclude all DPMs that are not viable. It should be
mentioned that using the Euclidean distance (a spe-
cific case of the Minkowski distance) often resulted in
strong classification performance. However, because
of our viability constraint, this measure does not ap-
pear often in the following results.
5.2 Comparison to Existing Models
Are DPMs better for image classification than the cur-
rent state of the art? To answer this question, we com-
pared them to linear, radial, polynomial and sigmoid
kernels. Table 3 shows a summary of the classifica-
tion performance for our pedestrian detection task.
Table 3: Comparison to the State of the Art.
Kernel % Correct
Sigmoid 50
Radial 50
Linear 92
Polynomial 92
Baroni + Shepard (Normalisation) 96
Histogram + Shepard (Minkowski) 95
Tanimoto Index + Boxing 94
Russel & Rao-Minkowski 94
Experiments showed that sigmoid and radial ker-
nels performed poorly, while the widely-used linear
and polynomial kernels performed well. Many tested
Machine Learning with Dual Process Models
151
DPMs made less than 90% correct test data classifi-
cations. However, about 9% of all DPMs performed
that well or better.
5.3 Generalisation
All DPMs were tested with different generalisation
functions. We group all DPMs with a classification
performance of at least 90% by their generalisation
function. The results can be seen in Table 4.
Table 4: Percentage of High-performing DPMs per
Generalisation Function.
Generalisation % of good DPMs
Shepard 51,0
None 23,5
Gaussian 23,5
Boxing 2,0
The Shepard generalisation function was most of-
ten part of high-performing DPMs. Surprisingly, not
using any generalisation function proved as success-
ful as using the Gaussian generalisation function. The
Boxing function did not work well, but we found that
its performance increases if additional iterations were
allowed during SVM training.
The data show that if a combination of taxonomic
and thematic measure is successful with one gener-
alisation function, it tends to be successful with other
generalisation functions, too. The probability of arriv-
ing at a high-performing DPM is highest when using
the Shepard generalisation function. However, good
classification performances could be obtained with
most generalisation functions, as long as fitting the-
matic and taxonomic measures were chosen. Based
on the experiments, selecting the taxonomic and the-
matic measure seems to have a much larger impact on
the classification performance of DPMs.
5.4 Quantitative and Predicate-based
Measures
As already discussed, quantitative measures operate
on real-valued feature vectors, while predicate-based
measures operate on 0/1 values. To keep the num-
ber of experiments manageable, we first had to test
all purely quantitative and all purely predicate-based
DPMs. Only the most promising measures of these
experiments where tested in combination. This ap-
proach is inspired by genetic algorithms.
The experiments indicated that if quantitative
measures are used exclusively, their performance is
slightly better than the exclusive use of predicate-
based measures. Table 5 states the classification per-
formance of the best DPMs that use only predicate-
based measures.
Table 5: Classification Performance of Predicate-based
DPMs (Shepard Generalisation used in all instances).
Taxonomic Thematic %
Sorgenfrei Batagelj & Bren 90
Hawkins & Dotson Variance Dissimilarity 90
Baroni-Urbani & Buser Baulieu Variant 2 90
Coeff. of Arith. Means Baulieu Variant 2 90
Proportion of Overlap Baulieu Variant 2 90
Like before, 90% seems to appear more often than
it should. Again, this is explained by the difficult
test images that lead to the same errors for all shown
DPMs. Hence, our predicate-based feature vector ex-
traction is not discriminative enough.
Table 6 shows the best DPMs that use only quanti-
tative measures. Their correct classification rate is al-
ways a little bit higher than the rate of their predicate-
based counterparts.
Table 6: Classification Performance of Quantitative DPMs.
Taxonomic Gen. Thematic %
Histogram Shepard Minkowski Dist., 95
Intersection Meehl Index
Histogram Shepard Kullback/Leibler, 95
Intersection Jeffrey Divergence
Histogram Shepard Exp. Divergence, 95
Intersection Normalisation
Histogram Shepard Kagan Divergence, 95
Intersection Mahalanobis Dist.
Tanimoto Index Shepard Minkowski Dist. 94
Modified Gauss Minkowski Dist., 93
Dot Product Mahalanobis Dist.
Modified Shepard Mahalanobis Dist. 93
Dot Product
Cosine Measure Gauss Minkowski Dist., 93
Mahalanobis Dist.
Cosine Measure Shepard Mahalanobis Dist. 93
Tanimoto Index Shepard Normalisation, 92
Mahalanobis Dist.
Until now, our DPMs used either quantitative or
predicate-based measures only - but these two types
of measures can be mixed. Table 7 summarises the
classification performance of the best mixed DPMs.
Note that some mixed DPMs appear in Table 7
that were not part of the best purely quantitative
DPMs or purely predicate-based DPMs. The reason
for this is that DPMs that performed well, but were
not viable, were also permitted to take part in the
mixed test round. However, all of the mixed DPMs
are still required to be viable. We can see that mixed
DPMs work as well as quantitative or predicate-based
DPMs. This is an encouraging result, because it al-
lows us to select our DPM parts based on the feature
vector type at hand.
ICPRAM 2016 - International Conference on Pattern Recognition Applications and Methods
152
Table 7: Top 10 Classification Performance of Mixed
DPMs.
Taxonomic Gen. Thematic %
Baroni-Urbani & Shepard Normalisation 96
Buser
Sorgenfrei Shepard Normalisation 95
Coeff. of Shepard Normalisation 95
Arith. Means
Russel & Rao Shepard Exponential 94
Div.
Russel & Rao None Minkowski 94
Dist.
Russel & Rao None Exponential 94
Div.
Tanimoto Index Boxing, Compl. of 94
Gaussian Hamming Dist.
Tanimoto Index Shepard Compl. of 94
Hamming Dist.
Correlation Shepard, Baulieu Var. 2 94
Coefficient None
Correlation Shepard, Batagelj & Bren 94
Coefficient None
Against intuition, mixing quantitative mea-
sures with predicate-based measures (that performed
slightly weaker in general), still often lead to im-
proved classification performance. This is further em-
pirical evidence in support of DPMs.
6 CONCLUSIONS AND FUTURE
WORK
We implemented pedestrian detection in images to be
able to test DPMs in a real world task. Any DPM
is a combination of two measures. Obviously, if us-
ing just one measure performs as well or better than
using two measures, we do not deal with a viable
DPM. Only 14% of our DPMs were found to be vi-
able. DPMs can be formulated with quantitative mea-
sures (i.e. real values), predicate-based measures (i.e.
countable or 0/1 values) and with a mix of both types
of measures. We did not find conclusive evidence that
a certain measure type (e.g. measuring taxonomic and
thematic thinking with quantitative measures) works
better than any other type.
We discovered DPMs that performed as good as
or better than the existing linear and polynomial ker-
nels. However, it has to be mentioned that this is
not a mandatory proof that DPMs outperform the cur-
rent state of the art. Conclusive evidence would have
to carry out statistical testing to be able to state sig-
nificance levels of classification performances. For
this, every single specific DPM has to be tested many
times. To make this possible, runtime has to be im-
proved.
Future work could either use algorithms that yield
good classification results with much smaller fea-
ture vectors or focus only on a few possible DPMs.
To support this, we provided a construction kit for
well-performing DPMs. Another interesting direction
for further research are DPMs in other domains, for
example audio and text retrieval or non-multimedia
problems like recommender systems and computa-
tional finance. Because DPMs are kernel func-
tions, they can be readily used with algorithms other
than SVMs like Gaussian processes, ridge regression,
spectral clustering and many more.
REFERENCES
Dalal, N. and Triggs, B. (2005). Histograms of Oriented
Gradients for Human Detection. In Computer Vi-
sion and Pattern Recognition, IEEE Computer Society
Conference on, volume 1, pages 886–893. IEEE.
Dollar, P., Wojek, C., Schiele, B., and Perona, P. (2012).
Pedestrian Detection: An Evaluation of the State of
the Art. Pattern Analysis and Machine Intelligence,
IEEE Transactions on, 34(4):743–761.
Eidenberger, H. (2012). Handbook of Multimedia Informa-
tion Retrieval. BoD–Books on Demand.
Joachims, T. (1998). Making Large-Scale SVM Learning
Practical. LS8-Report 24, Universit
¨
at Dortmund, LS
VIII-Report.
Sikora, T. (2001). The MPEG-7 Visual Standard for Con-
tent Description-An Overview. Circuits and Sys-
tems for Video Technology, IEEE Transactions on,
11(6):696–702.
Wisniewski, E. J. and Bassok, M. (1999). What Makes a
Man Similar to a Tie? Stimulus Compatibility With
Comparison and Integration. Cognitive Psychology,
39(3):208–238.
Machine Learning with Dual Process Models
153
