
Requirements Planning with Event Calculus for Self-adaptive
Multi-agent System
Wei Liu
1,2
, Feng Yao
1
and Ming Li
1
1
School of Computer Science and Engineering, Wuhan Institute of Technology, Wuhan, China
2
Hubei Province Key Laboratory of Intelligent Robot, Wuhan Institute of Technology, Wuhan, China
Keywords: Requirement Planning Graph, Event Calculus, Cooperative Robot System.
Abstract: Self-adaptation of Multi-agent cooperative systems requires dynamic decision making and planning at
runtime. Modeling the contextual and executable requirements of such systems as planning actions and states,
this paper proposes a requirements-driven planning approach to self-adaptation. The planning model includes
the states of the system context and the actions describing the behaviors of its multiple agents; the interactions
between these agents and their environment are computed through an expansion of the requirements-driven
planning graph, which is then used to verify whether the agents can collaborate in order to reach the desired
goal states from their current states. In addition, the requirements are represented for Event Calculus to
facilitate monitoring and reasoning about the actions of agents, achieving requirements driven planning at
runtime.
1 INTRODUCTION
Self-adaptive systems must be capable of
synthesising adaptation strategies at runtime to deal
with the dynamically changing and uncertain
environment in which they evolve. Engineering such
self-adaptive systems, it is argued that requirements,
architectures, and middlewares are all principal
techniques (Salehie and Tahvildari,2009).
Multi-Agent Systems(MAS) are cooperative
models and distributed optimization techniques,
which can be useful in self-adaptive systems.
Engineering such cooperative self-adaptive systems
requires dealing with requirements, and software
architectures. Because of possible deviations
between the systems agents runtime behavior and
the requirements, self-adaptive systems shall be
requirements-aware (Sawyer et al., 2010).
Representation and modelling requirements,
approaches for self-adaptive software include
REAssuRE (Welsh et al., 2011), RELAX (Whittle et
al., 2010) already use goal-based modelling
notations. However, these approaches do not
consider requirements as being contextual and
executable.
Contextual requirements mean that changes in
the software context can trigger the changes of the
predefined software requirements. Early research on
contextual requirements (Ali et al., 2010), (Seyed
and Minseok, 2012) only used contexts as the
preconditions for goal decomposition or the
triggering event in business processes modeling.
Executable requirements mean that requirements
should be reasoned about at runtime and interpreted
as implemented behaviors. Bencomo et al., (2010)
treated requirements as the firstclass runtime entities
for software systems to reason about them and to
relax their interpretations at runtime. However, they
do not represent the dynamic information of
adaptive requirements.
To meet these challenges of contextual and
executable requirements, this paper proposes a
requirements-driven planning approach for the
runtime self-adaptation. The approach consists of the
following major elements:
1) We support changes in the software context
and use requirements to drive adequate planning
at runtime;
2) We define a requirements-driven planning
graph model that includes states representing the
software contexts and actions representing the
system behaviors;
3) We propose an algorithm for expanding the
requirements-driven planning graph to model the
Interactions between agents and their
110
Liu, W., Yao, F. and Li, M.
Requirements Planning with Event Calculus for Self-adaptive Multi-agent System.
DOI: 10.5220/0005660001100117
In Proceedings of the 8th International Conference on Agents and Artificial Intelligence (ICAART 2016) - Volume 1, pages 110-117
ISBN: 978-989-758-172-4
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

environment as Event Calculus specifications;
4) We use the specification to monitor whether
the agents can collaborate to reach the desired
goal states from their current states.
Our major contribution here is in translating the
requirements model into Event Calculus to facilitate
necessary reasoning for requirements-driven
planning at runtime.
To illustrate the concepts and algorithms, we use
a simple but representative scenario of two robots to
adapt their actions through requirements-driven
planning. One robot Nao has more capabilities in
monitoring the environment (including the status of
the second robot iCreate), whilst the iCreate is a
“dumb” cleaning robot who has excellent capability
in cleaning (its main designed purpose), speedy and
stable movement, and fall-detection. The states for
them are initially different, the goals (individual)
states may mutually exclude, interfere, or support
each other, under varying situations. Their
interpretation of the environment observable
behaviour can also be inconsistent, e.g., Nao has
internal notion of whether the door is open or close
through its image-detection capability, whilst
iCreate don’t. Nonetheless, a cohesive plan that
benefit both robots and the composed multi-agent
system with respect to the collective requirements
goals is achievable with the proposed framework.
The remainder of the paper is organized as
follows. Section II defines the basic concepts of
requirements-driven planning and event calculus
planning. Section III presents the approach and
details the requirements-driven planning graph
expansion and requirements extraction algorithms.
Section IV reports the results of our experiments
with a robotics application. Section V presents
related work. Finally, Section VI makes some
concluding remarks.
2 PRELIMINARIES
2.1 Self-adaptation Through Planning
Plans are automatically generated by finding a path
from the current states of system and its
environment to goal states, which amounts to choose
and order a sequence of actions in order to achieve
the goal.
In our previous work, we have applied a
probabilistic planning algorithm, PGraphPlan, to
support modelling uncertain requirements (Esfahani
and Malek, 2013). Compared to a probabilistic
planning performed offline (Little and Thibaux,
2007), our online planning and replanning approach
is considered more suitable for runtime requirements
driven adaptation for two main reasons: (i) it
represents the current states, goal states and system
behavior as a planning model, and (ii) it induces a
contingency plan once when the states of system
environment or goals dynamically change.
A task for goal-oriented requirements planning
can be defined as follows.
Definition 1 (Goal-oriented Requirement
Planning Task): A goal-oriented requirement
planning task is a triple T = <O, I, G>, where
x O is a set of actions,
x
I is a set of the initial states,
x
G is a set of the goal states.
In logic planning, a state is defined as an atomic
boolean literal without any nested propositional
expression structure. At runtime, when the goal is in
any one of the initial states, a new planning will be
triggered to execute some actions. The planning will
not be terminated until any goal state is reached.
2.2 Event Calculus Planning
Since we are interested in runtime self-adaptive
multi-agent systems by which some values of states
will change during the execution process, two issues
must be addressed. The first is to identify the states
to monitor which could trigger plan actions in the
next layer of actions (Tun et al., 2009). The second
is to identify feature interactions (Tun et al., 2013),
in other words, which planned actions shall not
execute at the same timestamp. Two actions
associated with the same agent cannot be executed
synchronously, e.g., in the case of “landmark
detection” and “face detection” associated with the
NAO robot.
To address these issues as we did for
development-time diagnosing and detection of
feature interaction problems, for runtime reasoning
about actions and change at runtime we still use
Event Calculus because it supports temporal
descriptions of the events and actions. Here we give
the basic predicates of discrete event calculus used
in this paper (Mueller, 2004). Initiates(e, f, t) means
that Fluent f becomes true after event e occurs at
time t. Terminates(e, f, t) means that Fluent f
becomes false after event e occurs at time t.
Happens(e, t) means that Event e occurs at time t.
HoldsAt(f, t) means that Fluent f is true at time t. In
our paper, Fluent f indicates the states of agent or
environment, time point t could be a real time point
or some time stamp, and Event e indicates an action
executed by the agents of the system.
Requirements Planning with Event Calculus for Self-adaptive Multi-agent System
111
3 FRAMEWORK OF
REQUIREMENT-DRIVEN
PLANNING
Requirements-driven planning defines a runtime
model for requirements in order to adapt them to
contextual and dynamic changes of the system. The
main elements of our requirements-driven planning
framework are the behaviour and executable models
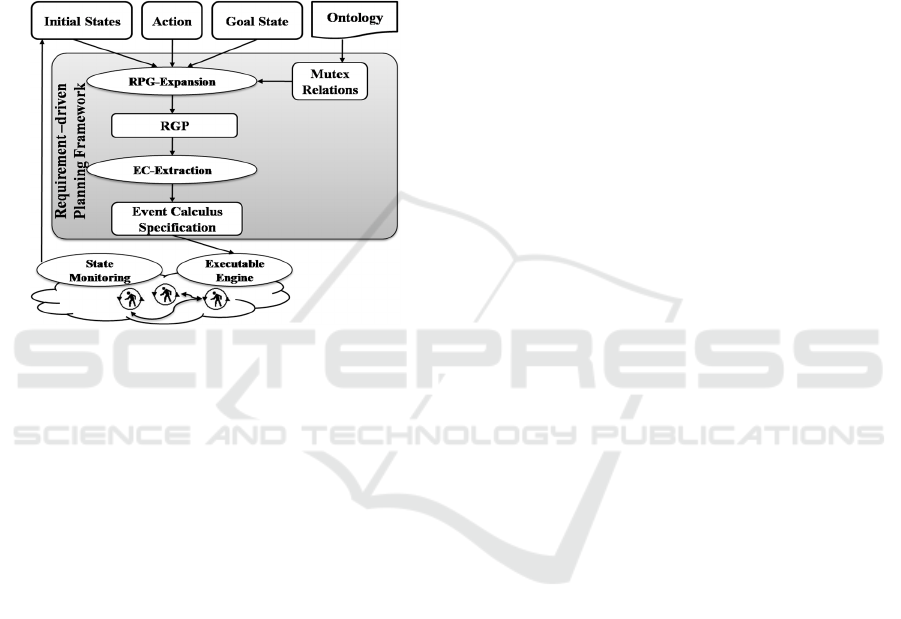
(see Figure 1).
Figure1: Requirements-driven planning framework.
The input to our frameworks includes the three
elements for the goal-oriented requirements planning
task in Definition 1, i.e., the initial and goal states
together with the plan actions. The current states will
be monitored to update the initial states for re-plan.
Additionally, the ontology represents the vocabulary
of domains and enables us to reason about its
concepts using subsumption, semantic equivalence
and disjoint. The result of this reasoning is
represented as mutex relations. Using the goal-
oriented requirement tasks and mutex relations, a
requirements-driven planning graph (RPG) is
obtained by an expansion algorithm. Another
algorithm for extracting Event Calculus
specifications follows, which is the input of
executable engine to control the software
components or software agents. In the subsequent
section, we detail the elements of the framework.
4 REQUIREMENTS-DRIVEN
PLANNING MODELING
4.1 Requirements-driven Planning
Graph
The plan actions are pre-defined to represent all
actions that could be executed by different agents in
the self-adaptive system.
Definition 2 (Plan Action): A plan action a is a
triple <pre(a); add(a); del(a)>, where
x pre(a) is a set of the preconditions of a,
x add(a) is a add list of a, and
x del(a) is a delete list of a.
The add and delete lists are sets of next-states.
For a state s
∈
add(a) and s’
∈
del(a), we say that
execution of action a will make s true and make s’
false. If all the preconditions of a plan action could
be satisfied, it will be triggered to the effect adding
some next-states and deleting some other next-states.
This modeling results in a Requirements-driven
Planning Graph (RPG), defined as follows.
Definition 3 (Requirements-driven Planning
Graph (RPG)): A requirements-driven planning
graph RPG is a couple <N, E> where
x N is a set of nodes, organized by alternating
action and state in a layered sequence N = S
0
⊕
A
1
⊕
S
1
⊕
A
2
⊕
S
2
x
x
x
S
n
in which
– S
0
are the initial states, that is S
0
= I,
– A
n
action layer A
i
includes all actions a
whose preconditions are met in the previous
state layer, i.e, pre(a)
⊆
S
i-1
,
– A state layer S
i
includes all actions a
j
i
∈
A
i
such that S
i
= S
i-1
∪
∪
add(a
j
i
)
\ ∪
del(a
j
i
);
x E is a set of directed edges E = E
pre
∪
E
add
\
E
del
where:
– Epre(s, a) is the set of edges from state
s
∈
S
i-1
to action a
∈
A
i
such that s
∈
pre(a),
– Eadd(a, s) is the set of edges from
action a
∈
A
i
to state s
∈
S
i
such that s
∈
add(a),
– Edel(a, s) is the set of edges from action
a
∈
A
i
to state s
∈
S
i
such that s
∈
del(a).
At runtime, an RPG will keep being expanded
with actions until all goal states S
n
are reached.
4.2 Reasoning Mutex Relations using
Ontology
An ontology is “a specification of a representational
vocabulary for a shared domain of discourse”
(Gruber, 1993). The purpose of ontology is to model
ICAART 2016 - 8th International Conference on Agents and Artificial Intelligence
112
and reason about domain knowledge. In OWL
description logic, semantic equivalence amounts to a
double subsumption, i.e., two concepts C and D are
semantically equivalent, denoted C ≡ D, iff all
instances of C belong to D and vice versa. When two
concepts C and D do not share any instance, they are
said to be semantically disjoint, written C
D.
In logical planning, states are associated with
Boolean propositions or predicates, which is
however insufficient to represent the full
semantics of the states for requirements driven
planning. Hence, we extend the semantics of a
state as follows.
Definition 4 (State Semantics): A state
semantics is a triple s = <prop(s), pred(s), val(s)>,
where:
x prop(s) is the property of s;
x pred(s) is the predicate of s;
x val(s) is the value of property.
In this way, the ontological relationships can
now be expressed on the states as following
mutex relations.
There are two state s
i
and s
j
, if
prop(s
i
)
≡
prop(s
j
), val(s
i
) ≡ val(s
j
) and pred(s
i
)
pred(s
j
), then s
i
and s
j
have mutex relation, denoted as
s
i
◇s
j
.
Extending state semantics onto the plan actions
associated with the states, there can be three types of
mutex relations between plan actions: inconsistent
effects, interference and competing needs. They are
categorized using the mutex relation between the
state semantics belonging to the set of preconditions
and effects of the plan actions involved. Inconsistent
effects relation indicates that two plan actions a
p
and
a
q
do not have inconsistent effects, which is denoted
as a
p
◇
ie
a
q
. Interference relation indicates that two
plan actions a
p
and a
q
do not have interference,
which is denoted as a
p
◇
in
a
q
. Competing needs
relation indicates that two plan actions a
p
and a
q
do
not have competing needs, which is denoted as a
p
◇
cn
a
q
.
5 REQUIREMENTS-DRIVEN
PLANNING ALGORITHM
5.1 RPG-Expansion Algorithm
We propose an algorithm RPG-Expansion that takes
as input an RPG with i layers and the plan action set
O
i and produces an RPG at the i + 1 layer if possible.
RPG-Expansion is executed inductively until the
goal states are included in the state layer S
i.
RPG-Expansion will be executed until the goal is
included in the state layer S
j
. The output is a
requirement planning graph RPG
i
+1
.
Al
g
orithm 1: RPG-Expansion(RP
G
i
, O
i
).
Require: RPG
i
and the plan action set O
i
Ensure: RPG
i+1
or fail
1: S
j
= S
j-1
;
2: for all a
j
= <pre(a
j
), add(a
j
), del(a
j
)>
∈
A
j
do
3: S
j
←
S
j
∪
add(a
j
)
4: S
j
←
S
j
\
del(a
j
)
5: if G
i
⊆
S
j
then
6: return RPG
i+1
7: end if
8: end for
9: if S
j
== S
j-1
then
10: return fail
11: else
12: for all a
p
= <pre(a
p
), add(a
p
), del(a
p
)>
∈
O
i
do
13: for all a
q
= <pre(a
q
), add(a
q
), del(a
q
)>
∈
A
j
do
14: if a
p
◇
cn
a
q
∨a
p
◇
ie
a
q
∨a
p
◇
cn
a
q
==0 then
15: if pre(a
k
)
⊆
S
j
then
16: A
j+1
←
A
j+1
∪
a
k
17: end if
18: end if
19: end for
20: end for
21: end if
22: return RPG
i+1
5.2 EC-Extraction Algorithm
Two main functions of runtime executable
extraction shall be realized by the EC-Extraction
algorithm. First, the algorithm can analyze the
substitute relation between plan actions in the same
action layer in RPG and generate different solution
for achieving the goal. Second, the algorithm can
decide which of the related states should be
monitored at every timestamp, which triggers the
modification of the behaviour of the system to
achieve the goal states in a changing environment.
Event calculus (EC) is suitable to represent self-
adaptive policies in our approach to realize the
second function for two reasons. First, EC can
describe all the artifacts in requirement plan graph
without semantic lost. A state s (trigger state or
result state) of plan action is represented as fluent in
EC, which is denoted as f(s). A plan action a is
represented as event in EC, which is denoted as
EC(a). Different predicates in EC can represent the
edges in graph. Second, EC can describe the
sequence of two plan actions which could not
execute at the same timestamp. The asynchronous
relation between two plan actions a
i
and a
j
is denoted
as AC
(a
i
, a
j
).
Requirements Planning with Event Calculus for Self-adaptive Multi-agent System
113
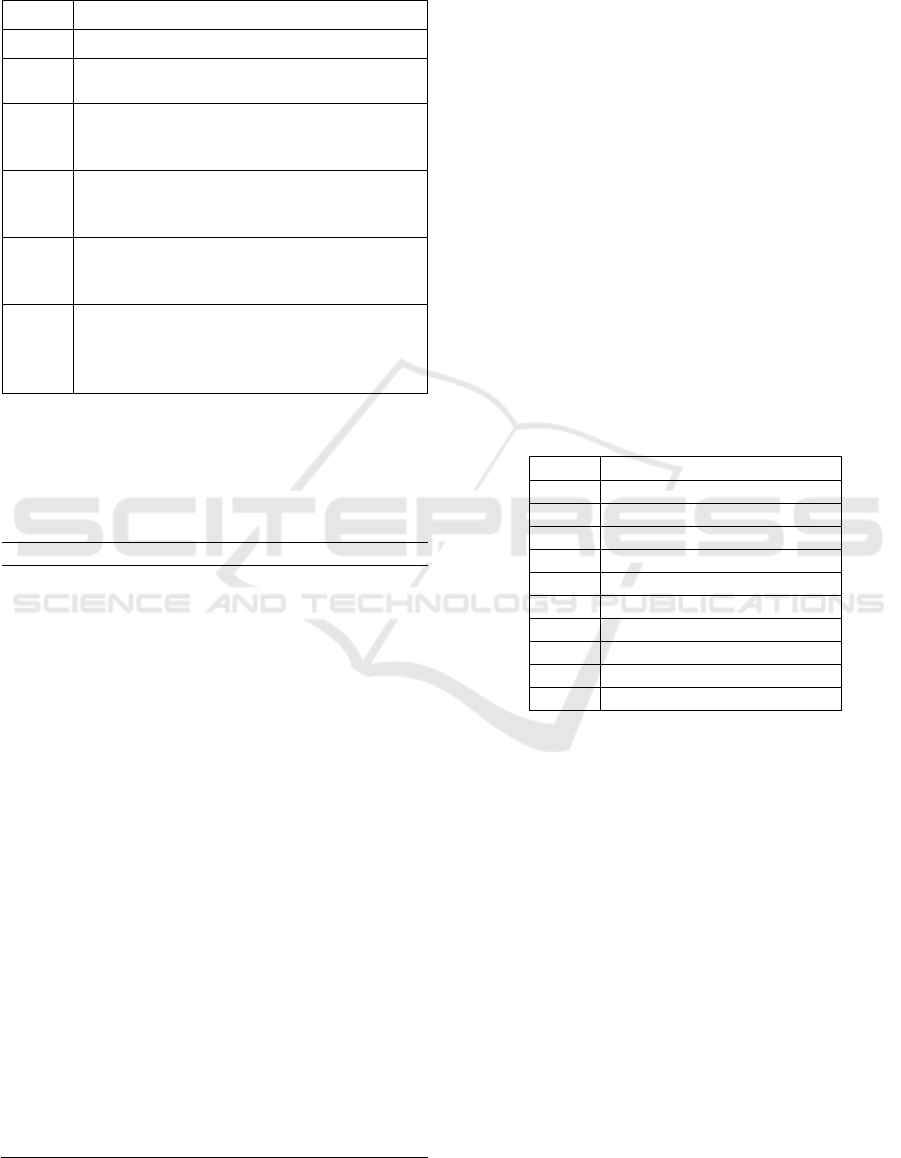
Table 1shows the rules for translating an RPG
into an executable model.
Table 1: Rules of generating self-adaptive policies.
Rules Description
Rule1 For every s
∈
S
0
, InitiallyP[f(s)] is generated;
Rule2 For every a
∈
A
k
, ∀s
∈
add(a), Happens[a, t
i
]
and Initiates[a, f(s), t
j
] (t
j
= t
i
+1) are generated;
Rule3 If a
i
, a
j
∈
A
k
and AC(a
i
, a
j
), then Happens[a
i
, t
i
]
and Happens[a
j
, t
j
] (t
j
= t
i
+2 or t
i
= t
j
+2) are
generated;
Rule4 For every a
∈
A
k
(k>1), ∀s
∈
pre (a), if ∀a’
∈
A
k-1
, s
i
!
∈
add(a’) and Happens[a, t
i
], then
HoldsAt[f(s), t
j
] (t
j
=t
i
-1)is generated;
Rule5 For every a
∈
A
k
, ∀ s
∈
del(a), if there is
Happens[a, t], Terminate[a, f(s), t
j
] (t
j
= t
j
+1) is
generated;
Rule6 For every s
∈
S
l
(S
l
is the last state layer ) and ∀
a∈A
l
, there is Happens[a, t
l
]( t
l
is the latest one
of all a in last action layer) , if s
∈
G and s!∈
add(a), then HoldsAt[f(s), t
j
]( t
j
= t
i
+1).
In these rules, we use time stamp as the time in
predicates. If these self-adaptation policies are used
in real time, then “ t
j
=t
i
+1” is replaced by “ t
j
>t
i
”
and “ t
j
=t
i
-1” is replaced by“ t
j
<t
i
”.
We propose an algorithm EC-Extraction for
generating a runtime executable model.
Al
g
orithm 2: EC-Extraction(RP
G
).
Require: RPG
Ensure:
1: Set a time stamp t
←
0
2: Get the initial states ini
3: Generate Initially(ini)
4: t + +
5: for all A
k
∈
RPG do
6: for all a
i
∈
A
k
do
7: if there is an action a
j
∈
list and AC(a
i
, a
j
) then
8: add a
i
into nextlist
9: else add a
i
into list
10: end if
11: end for
12: for all a
k
=<pre(a
k
), add(a
k
), del(a
k
)>
∈
list do
13: generate Happens(a
k
, t+1) and Initiates(a
k
, add(a
k
), t+1)
14: for all a
t
∈
A
k-1
do
15: if s
∈
pre(a
k
) and s
i
!
∈
add(a
t
), then
16: generate HoldsAt(s, t)
17: end if
18: end for
19: end for
20: if nextlist is not empty then
21: t + +
22: list
←
nextlist
23: go to 12
24: end if
25: end for
The algorithm EC-Extraction represents how to
translate the requirements-driven planning graph
RPG into Event Calculus format.
6 EXPERIENCE AND ANALYSIS
6.1 Case Study: Multi-robots
Cooperation
We have been experimenting with a requirements
planning through an early prototype demonstrator of
cleaning scenarios with two heterogeneous robots.
Both iRobot Create and NAO rely on discovery
protocols to advertise their presence in the
environment, the former uses Bluetooth discovery
while the latter uses Bonjour. The two robots need to
collaborate in order to secure a particular area in our
laboratory.
Table2 shows the 10 states mentioned in
cleaning scenarios are described with PDDL.
Table2: States description with PDDL.
State Description
s
1
(light ?lab ?notdark)
s
2
(statusNao ?nao ?available)
s
3
(know ?door ?closed)
s
4
(at ?door ?post)
s
5
(at ?create ?post)
s
6
(statusCreate ?create ?wait)
s
7
(safearea ?ar)
s
8
(cleaned ?create, ?lab)
s
10
(statusDoor ?door ?closed)
s
12
not(at ?create ?post)
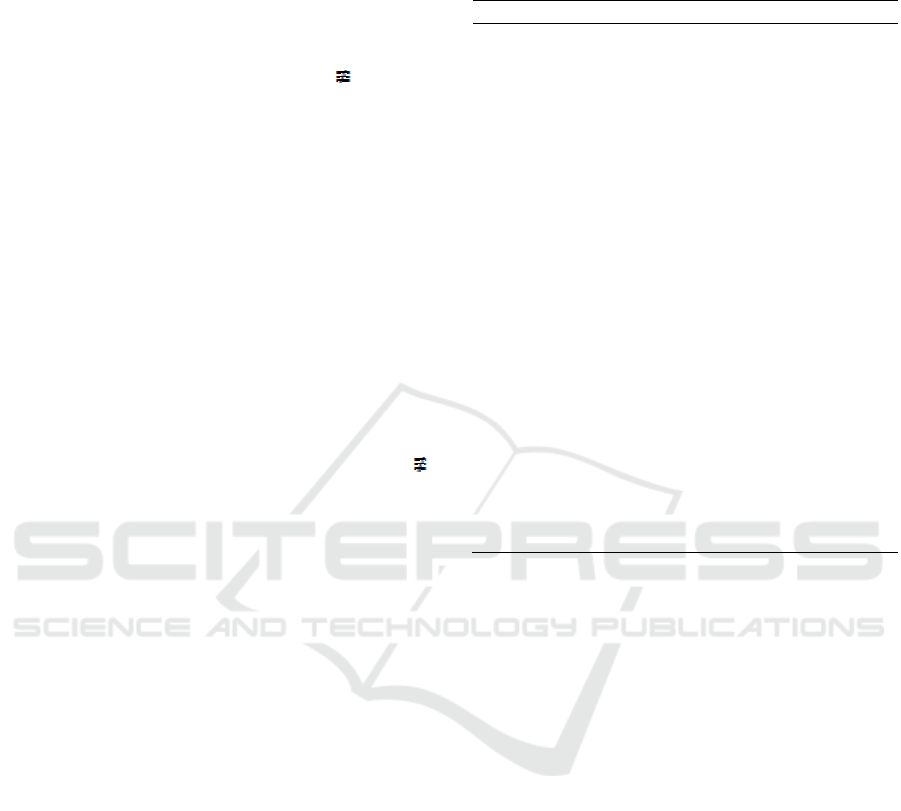
Consider for example in robots cleaning scenario,
the requirements-driven planning task T
rob
=<O
rob
,
I
rob
, G
rob
>. The input includes I
rob
= {s
1
, s
2
, s
6
, s
10
}
and G
rob
= {s
8
}. There are six actions defined in Orob
which includes a
1
:detectDoor, a
2
:getCreatePost,
a
3
:caculateSaftDistance, a
4
:cleanInSafe, a
5
:avail-
ableCreate, and a
6
:detectCreate. A requirements-
driven planning graph generator is realized with
RPG-Expansion algorithm. There is a valid
requirement planning graph RPG
3
that translates I
rob
to G
rob
, as shown in Figure 2.
Example1: there are two plan actions a
1
:
naoDetectdoor and a
6
: naoDetectCreate in a
1
have
asynchronous relation AC(a
1
, a
6
), according to rule 3
Happens[a
1
, t
1
] and Happens[a
6
, t
3
] are generated.
Example2: there is a plan action a
4
: cleanInSafe;
s
12
∈del(a
4
) and Happens[a
4
, t
5
], according to rule 5
Terminate[a
4
, f(s
12
), t
6
] is generated.
ICAART 2016 - 8th International Conference on Agents and Artificial Intelligence
114
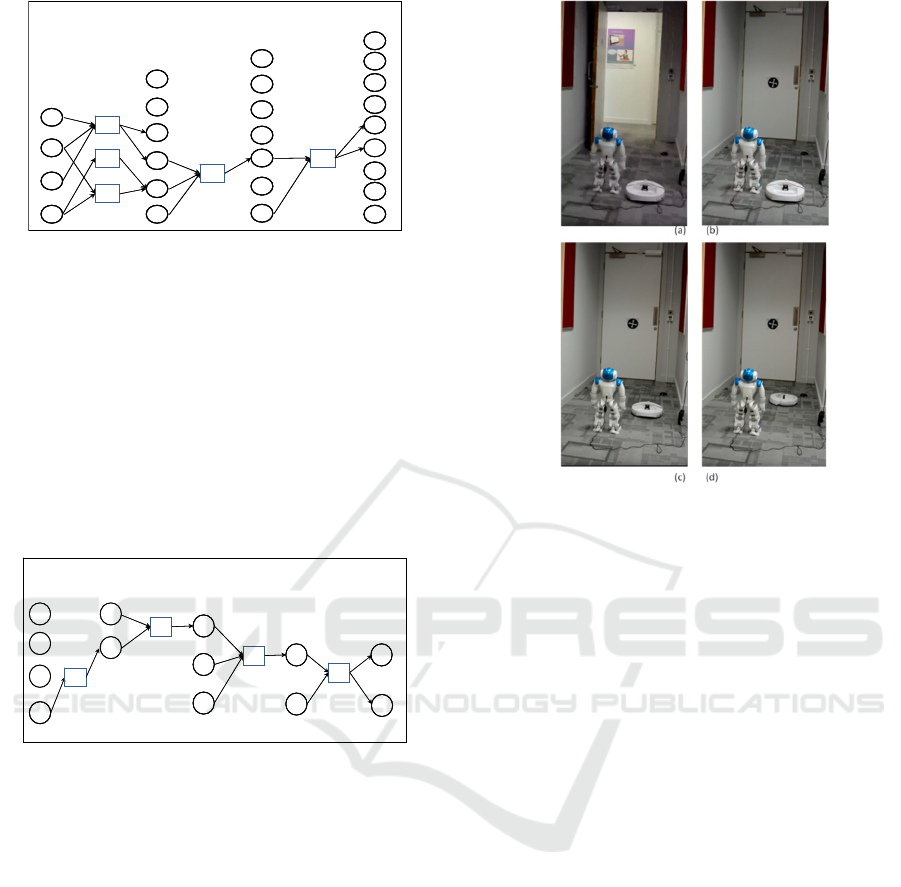
Figure 2: RPG
3
for multi-robots cooperation scenario.
The executable adaptive model could decide that
which of the related states should be monitored at
every timestamp. For example,
HoldsAt[f(s
6
),t
2
]
means that the value of fluent f(s
6
) should be true at
timestamp t
2
. If the value of fluent f(s
6
) is changed at
t
2
, then a new requirement planning task T
rob’
=
<O
rob
, I
rob’
, G
rob
>will be triggered. In the condition
of I
rob’
={s
2
, s
3
, s
4
, s
13
}, the plan action a
5
:
avaiableCreate will be induced into the planning to
achieve the goal. A new executable adaptive model
will be generated as shown in Figure 3.
Figure 3: A solution for new planning.
6.2 Result Analysis
A working prototype that follows the executable
model has been implemented, as is shown in Figure
4.
The generation of behaviour model is realised by
a RPG-Expansion module. The effectiveness of the
RPG-Expansion algorithm is mainly measured by
the mutex rate, which is the proportion of number of
mutex relations to number of all relations among
actions.
Provided that there are k step of matching and
the number of action in agent capability model is n.
The number of mutex relations is m and the number
of all relation among actions is
(1)/2nn−
. With this
assumption, mutex rate is
2/( 1)mnn−
.
Without the mutex relations between actions,
traditional decision making methods for self-
adaptation need to search for a match for all actions
Figure 4: Collaborating Robots Rlanning with Changing
Contexts: (a) Door is open, (b) Door is closed (detected by
Nao), (c) iCreate moves (instructed by Nao), (d) iCreate
turns (obstacle detected).
in planning graph. The worst case is when the
matching succeeds at the last round, in which the
number of matching is nk. Our approach analyzed
the mutex relations before the decision making
process. The average result of matching is
2/(1)mk n −
for
0(1)/2mnn≤≤ −
,
2/(1)mk n nk−≤
. The smaller m is, the more
average number of matching can be reduced in our
approach.
7 RELATED WORK
A number of proposals offer goal based requirement
models for requirements-driven self-adaptive. Baresi
et al., (2010) propose FLAGS requirements models
which are based on the KAOS framework and are
targeted at adaptive systems. In FLAGS, fuzzy goals
are mostly associated with non-functional
requirements. Souza et al., (2011) note that the
(partial) un-fulfilment of requirements triggers
adaptation. They introduce awareness requirements
to refer to success, failure, performance and other
properties of software requirements and propose to
monitor changes in these properties and decide when
adaptation should take place. These approaches alter
the goal model at runtime and enforce adaptation
s
1
s
2
s
10
s
6
a
1
a
2
a
6
s
1
s
2
s
3
s
4
s
5
s
6
a
3
s
1
s
2
s
3
s
4
s
5
s
6
s
7
a
4
s
1
s
2
s
3
s
4
s
5
s
6
s
7
s
8
s
12
S
0
S
1
S
2
S
3
A
1
A
2
A
3
s
1
s
1
s
2
s
2
s
10
s
10
s
6
s
6
a
1
a
2
a
6
s
1
s
1
s
2
s
2
s
3
s
3
s
4
s
4
s
5
s
5
s
6
s
6
a
3
s
1
s
1
s
2
s
2
s
3
s
3
s
4
s
4
s
5
s
5
s
6
s
6
s
7
s
7
a
4
s
1
s
1
s
2
s
2
s
3
s
3
s
4
s
4
s
5
s
5
s
6
s
6
s
7
s
7
s
8
s
8
s
12
S
0
S
1
S
2
S
3
A
1
A
2
A
3
a
6
a
3
a
4
t
2
t
4
t
8
t
1
t
3
t
5
t
0
t
7
t
6
f(s
3
)
f(s
2
)
f(s
8
)
f(s
4
)
f(s
5
)
f(s
4
)
f(s
6
)
f(s
7
)
f(s
6
)
f(s
12
)
f(s
13
)
a
5
f(s
6
)
f(s
2
)
a
6
a
3
a
4
t
2
t
4
t
8
t
1
t
3
t
5
t
0
t
7
t
6
f(s
3
)
f(s
2
)
f(s
8
)f(s
8
)
f(s
4
)
f(s
5
)f(s
5
)
f(s
4
)f(s
4
)
f(s
6
)f(s
6
)
f(s
7
)f(s
7
)
f(s
6
)f(s
6
)
f(s
12
)f(s
12
)
f(s
13
)f(s
13
)
a
5
f(s
6
)
f(s
2
)
Requirements Planning with Event Calculus for Self-adaptive Multi-agent System
115

directives on the running system. Our framework
monitors the goal state at runtime and alters the plan
actions for self-adaptation.
Sabatucci et al., (2013) proposed a GoalSPEC
language for supporting evolution and self-
adaptation. In GoalSPEC every goal describes three
elements: initial state, final state and actors. The
actors operate a state transition from an initial state
to n final state. In the next work, the overview of a
framework for adaptive workflow was presented to
find a distributed plan to address the injected goals.
Our framework has the potential to enrich these
works by the consideration of parallel and mutex
relations between actions which considers all the
reasonable solutions for current states.
Planning-based approach shall plan future
behaviour of the system continuously. Sykes
proposed an implementation of Krammer (Sykes et
al., 2008) and Magee's three-layer architecture that
distinguishes between component-based control,
architectural (re)configuration, and high-level task
(re)planning (Kramer and Magee, 2007). Plans
generated from the highest layer (i.e., goals) are
configured by the middle layer (i.e., configurations)
to be executed by the lowest layer (i.e., components).
Some solutions have begun to study the task
replanning at runtime: PLASMA (Tajalli et al., 2006)
supports replanning and adapting the middle layer in
a similar, layered architecture, which is to provide a
framework that automates the generation and
enactment of plans while the employed feedback
loops. Requirements-Driven Feedback Loops (Chen
et al., 2014) exerts adjusting controls to optimize
away limiting uncertainty factors. However, current
approaches are unable to intelligently compute new
adaptation plans by taking into account mutex
relations using the semantic knowledge of the
application domains.
8 CONCLUSIONS
The main contribution of the paper is a semantic
rule-based transformation from requirements model
to event calculus specifications that can support
runtime interaction with environment and replanning
the multi-agent system at runtime. Comparing with
the predefined policy-based approaches, planning-
based approach can overcome the conflicts between
policies that are otherwise impossible for system to
resolve for achieving the goal states collectively.
Our replanning approach leaves out the translation
of control actions into execution operations and
structural adaptations, which we believe is
reasonable for executing the known plan actions at
runtime.
Our future work will integrate this proposal with
other multi-agent interaction modeling techniques
based on the agent commitments and we will
conduct case studies on the automated guided
vehicle (AGV) domain that include human agents.
ACKNOWLEDGEMENT
The authors would like to thank B. Nuseibeh, Y. J.
Yu, A. Bennaceur in Open University. Project
supported by the National Natural Science
Foundation of China under Grant (No. 61502355,
and No.61272115), the Natural Science Foundation
of Hubei Province (No.2014CFB779), the Doctor
foundation for Science Study Program of Wuhan
institute of technology (No.K201475).
REFERENCES
Ali, R., Dalpiaz, F., and Giorgini, P., 2010. A goal-based
framework for contextual requirements modeling and
analysis. Requir. Eng., vol. 15, no. 4, pp. 439-458.
Baresi, L., Pasquale, L. and Spoletini, P., 2010. Fuzzy
goals for requirements-driven adaptation. In
Requirements Engineering Conference (RE), 18th
IEEE International. IEEE, 2010, pp. 125–134.
Bencomo, N., Whittle, J., Sawyer, P., Finkelstein, A. and
Letier, E., 2010.Requirements reflection: requirements
as runtime entities. In Proc. of the 32nd ACM/IEEE
International Conference on Software Engineering,
ICSE, pp. 199-202.
Chen, B., Peng, X., Yu Y., Nuseibeh, B. and Zhao W.,
2014.Self-adaptation through incremental generative
model transformations at runtime. In the 36th
International Conference on Software Engineering.
Esfahani, N., Malek, S., 2013. Uncertainty in Self-
Adaptive Software Systems. Software Engineering for
Self-Adaptive Systems II Lecture Notes in Computer
Science Volume 7475, pp214-238.
Gruber, T. R. 1993. A translation approach to portable
ontology specifications. Knowledge Acquisition, vol.
5, no. 2, pp. 199C220, [Online].
Available:http://dx.doi.org/ 10.1006/knac.1993.1008.
Kramer, J., and Magee, J., 2007. Self-managed systems:
an architectural challenge. In Proc. of Workshop on
the Future of Software Engineering, FOSE, pp. 259-
268.
Little, I. and Thibaux, S., 2007. Probabilistic planning vs
replanning. In Proceedings of the ICAPS’07 Workshop
on the International Planning Competition: Past,
Present and Future.
Mueller E. T., 2004. Event calculus reasoning through
satisfiability. J. Log.Comput., vol. 14, no. 5, pp. 703-
ICAART 2016 - 8th International Conference on Agents and Artificial Intelligence
116

730.
Salehie, M. and Tahvildari, L., 2009. Self-adaptive
software: Landscape and research challenges, TAAS,
vol. 4, no. 2.
Sawyer, P., Bencomo, N., Whittle, J., Letier, E. and
Finkelstein, A., 2010. Requirements-aware systems: A
research agenda for re for self-adaptive systems. In
Proc. of the 18th IEEE International Requirements
Engineering Conference, RE, pp. 95-103.
Seyed, H.S. and Minseok, S., 2012. Understanding
Requirement Engineering for Context-Aware. Journal
of Software Engineering and Applications,Vol.5 No.8.
Sykes, D., et al, 2008. From Goals to Components: A
Combined Approach to Self-management. In
Proceedings of Workshop on Software Engineering for
Adaptive and Self-managing Systems.
Sabatucci, L., Ribino, P., Lodato, C., Lopes, S.,
Cossentino, M. , 2013. GoalSPEC: a Goal
Specification Language supporting Adaptivity and
Evolution. In: EMAS 2013, LNAI 8245. p.237–256.
Tajalli, H., Garcia, J., Edwards, G. and Medvidovic, N.,
2010. PLASMA: a plan-based layered architecture for
software modeldriven adaptation. In Proceedings of
IEEE/ACM International Conference on Automated
Software Engineering, pp.467-476.
Tun, T. T., Jackson, M., Laney, R., Nuseibeh, B. and Yu
Y., 2009. Are your lights off? using problem frames to
diagnose system failures. In 21st IEEE International
Requirements Engineering Conference (RE), vol. 0,
pp. 343-348.
Tun, T. T., Laney, R., Yu, Y. and Nuseibeh, B., 2013.
Specifying software features for composition: A tool-
supported approach. Computer Networks. vol. 57, no.
12, pp. 2454-2464, feature Interaction in
Communications and Software Systems.
V. E. Silva Souza., Lapouchnian, A., Robinson,
W.N., Mylopoulos, John., 2011. Awareness
Requirements for Adaptive Systems. In ICSE
Symposium on Software Engineering for Adaptive and
Self-Managing Systems, SEAMS 2011, Waikiki,
Honolulu , HI, USA, May 23-24.
Welsh, K., Sawyer, P. and Bencomo, N., 2011.Towards
requirements aware systems: Run-time resolution of
design-time assumptions. In Proc. of the 26th
IEEE/ACM International Conference on Automated
Software Engineering, ASE, pp. 560-563.
Whittle, J., Sawyer, P., Bencomo, N., Cheng, B. H. C., and
Bruel, J.-M., 2010. Relax: a language to address
uncertainty in selfadaptive systems requirement.
Requir. Eng., vol. 15, no. 2, pp. 177-196.
Requirements Planning with Event Calculus for Self-adaptive Multi-agent System
117
