
Relative Pose Estimation from Straight Lines using Parallel Line
Clustering and its Application to Monocular Visual Odometry
Naja von Schmude
1,2
, Pierre Lothe
1
and Bernd J
¨
ahne
2
1
Computer Vision Research Lab, Robert Bosch GmbH, Hildesheim, Germany
2
Heidelberg Collaboratory for Image Processing, Ruprecht-Karls-Universit
¨
at Heidelberg, Heidelberg, Germany
Keywords:
Relative Pose Estimation, Lines, Clustering, Monocular Camera, Visual Odometry.
Abstract:
This paper tackles the problem of relative pose estimation between two monocular camera images in texture-
less scenes. Due to a lack of point matches, point-based approaches such as the 5-point algorithm often fail
when used in these scenarios. Therefore we investigate relative pose estimation from line observations. We
propose a new approach in which the relative pose estimation from lines is extended by a 3D line direction
estimation step. The estimated line directions serve to improve the robustness and the efficiency of all pro-
cessing phases: they enable us to guide the matching of line features and allow an efficient calculation of
the relative pose. First, we describe in detail the novel 3D line direction estimation from a single image by
clustering of parallel lines in the world. Secondly, we propose an innovative guided matching in which only
clusters of lines with corresponding 3D line directions are considered. Thirdly, we introduce the new relative
pose estimation based on 3D line directions. Finally, we combine all steps to a visual odometry system. We
evaluate the different steps on synthetic and real sequences and demonstrate that in the targeted scenarios we
outperform the state-of-the-art in both accuracy and computation time.
1 INTRODUCTION
Relative pose estimation is the problem of calculating
the relative motion between two or more images. It
is a fundamental component for many computer vi-
sion algorithms such as visual odometry, simultane-
ous localization and mapping (SLAM) or structure
from motion (SfM). In robotics, these computer vi-
sion algorithms are heavily used for visual navigation.
The classical approach to estimate the relative
pose between two images combines point feature
matches (e.g. SIFT (Lowe, 2004)) and a robust (e.g.
RANSAC (Fischler and Bolles, 1981)) version of the
5-point-algorithm (Nister, 2004). This works well
under the assumption that enough point matches are
available, which is usually the case in structured and
textured surroundings.
As our target application is visual odometry in in-
door environments (e.g. office buildings) where only
little texture is present, point-based approaches do not
work. But lots of lines are present in those scenes (cf.
Figure 1), hence, we investigate lines for relative pose
estimation.
In this paper, we present a novel relative pose es-
timation scheme for lines. In our work, which got
Figure 1: A typical indoor scene with few texture in which
a lot of lines are detected.
inspired by Elqursh and Elgammal (Elqursh and El-
gammal, 2011), we propose to start the relative pose
estimation process with a new 3D line direction es-
timation step. Moreover, we then use this direction
information through all steps of the processing which
enables us to drastically improve both the robustness
and the computation time of the relative pose estima-
tion.
Our contributions are:
• an improved line clustering algorithm for estima-
tion of the 3D line directions per image with a
novel clustering initialization.
Schmude, N., Lothe, P. and Jähne, B.
Relative Pose Estimation from Straight Lines using Parallel Line Clustering and its Application to Monocular Visual Odometry.
DOI: 10.5220/0005661404210431
In Proceedings of the 11th Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2016) - Volume 3: VISAPP, pages 423-433
ISBN: 978-989-758-175-5
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
423

• a new line matching scheme in which only lines
with corresponding 3D line directions are consid-
ered. The proposed scheme improves the robust-
ness of the line matching since there is until now
no “SIFT” equivalent for lines.
• a robust and fast framework combining all neces-
sary steps for relative pose estimation using lines.
2 RELATED WORK
The trifocal tensor is the standard method for relative
pose estimation using lines. The trifocal tensor calcu-
lation requires at least 13 line correspondences across
three views (Hartley, 1994; Hartley and Zisserman,
2004). For two views, it is in general not possible to
estimate the camera motion from lines as shown by
Weng et al. (Weng et al., 1992), unless further knowl-
edge of the observed lines can be assumed. If for ex-
ample different pairs of parallel or perpendicular lines
are given, as it is always the case in the “Manhattan
world”
1
, the number of required views can be reduced
to two.
As the number of views is reduced, the number
of required line correspondences declines as well, be-
cause only five degrees of freedom have to be esti-
mated (three for the rotation and two for the transla-
tion up to scale) compared to 26 for the trifocal ten-
sor. Problems with small degrees of freedom are ben-
eficial for robust methods like RANSAC as the num-
ber of iterations can be decreased. Concerning the
method proposed in this paper, only two views are
required where the rotation is estimated from a mini-
mal of two 3D line direction correspondences and the
translation from at least two intersection points.
In their work, Elqursh and Elgammal (Elqursh and
Elgammal, 2011) employ the “Manhattan world” as-
sumption and require only two views as well. They
try to find “triplets” of lines, where two of the lines
are parallel and the third is perpendicular to the oth-
ers. The relative pose can then be estimated from
one triplet. The pose estimation process is split up
into two steps: first, the vanishing point information
of the triplet is used to calculate the relative rotation.
Then, the relative translation is estimated using the
already calculated rotation and intersection points be-
tween lines. The detection of valid triplets for rotation
estimation is left over to a “brute force” approach,
in which all possible triplet combinations are tested
1
A scene complies with the “Manhattan world” assump-
tion if it has three dominant line directions which are or-
thogonal and w.l.o.g. can be assumed to coincide with the
x-, y- and z-axis of the world coordinate system.
through RANSAC. As the number of possible triplets
is in O(n
3
) for n lines, this computation is very ex-
pensive. Contrarily, our rotation estimation method is
more efficient as we calculate it from 3D line direc-
tions and the number m of different 3D line directions
per image is much smaller than the number of lines
(in our cases m < 10 whereas n > 100). In addition,
we do not need the restricting “Manhattan world” as-
sumption which would require orthogonal dominant
directions but a less stricter form where we allow ar-
bitrary directions.
Similar approaches requiring two views were pre-
sented by Wang et al. (Wang et al., 2008) and Bazin
et al. (Bazin et al., 2010). In both works, the pose es-
timation is split up into rotation and translation esti-
mation as well, where the rotation calculation relies
on parallel lines. Bazin et al. estimate the transla-
tion from SIFT feature point matches. Their approach
is also optimized for omnidirectional cameras. Our
method requires only lines and no additional point
feature detection as we calculate the translation from
intersection points.
Computer vision systems requiring relative pose
estimation are e.g. visual odometry, SLAM and SfM.
Several line-based SfM methods exist like (Weng
et al., 1992; Hartley and Zisserman, 2004; Bartoli and
Sturm, 2005; Schindler et al., 2006) which formulate
the SfM problem as a nonlinear optimization. The ini-
tial configuration is calculated using the trifocal ten-
sor or is derived from other input data. The approach
from Schindler et al. (Schindler et al., 2006) takes
“Manhattan World” assumptions into account and in-
cludes a vanishing point clustering on pixel level. Our
method could be used in these SfM algorithms as an
alternative for initialization requiring only two views.
An EKF-based SLAM method called “StructSLAM”
(Zhou et al., 2015) has recently been published which
extends a standard visual SLAM method with “struc-
ture lines” which are lines aligned with the dominant
directions. Witt and Weltin (Witt and Weltin, 2013)
presented a line-based visual odometry algorithm us-
ing a stereo camera setup. The relative pose is esti-
mated using a nonlinear optimization of the 3D line
reconstruction similar to ICP which requires the use
of a stereo camera whereas our approach is designed
for monocular cameras. In section 3, we present our
relative pose estimation approach: first, we introduce
a method to estimate line directions through parallel
line clustering using a single image (section 3.3). In
section 3.4, we describe a novel matching algorithm
where only lines with the same 3D line direction are
considered. Afterwards, the relative pose is estimated
as described in section 3.5. In chapter 4, we present
a visual odometry system based on our relative pose
VISAPP 2016 - International Conference on Computer Vision Theory and Applications
424

Parallel line
clustering
Line acquisition
Guided
matching
Relative pose estimation
Relative rotation
estimation
Relative translation
estimation
Figure 2: Process chain for relative pose estimation.
estimation method. We finally evaluate our method
in section 5 and show that we outperform the current
state-of-the-art.
3 RELATIVE POSE ESTIMATION
FROM LINES
In this section, we describe our relative pose estima-
tion pipeline in detail which is visualized in Figure
2.
3.1 Notation
In relative pose estimation, we deal with entities in
different coordinate systems: there are objects in the
image (denoted by subscript i, like the line l
i
or point
p
i
) and in the camera frame (denoted by subscript C,
like the 3D line direction vector d
C
).
A projective mapping is used to project a point X
C
from the camera frame onto the image plane. K is the
known 3 ×3 calibration matrix of the camera.
x
i
= KX
C
(1)
The transformation between two coordinate sys-
tems is defined by T
to← f rom
= [R
to← f rom
, t
to← f rom
]
with R
to← f rom
∈ SO(3) the rotation and t
to← f rom
∈ R
3
the translation. The transformation from a point X
C
a
in camera a into the coordinate system of the camera
b is done with
X
C
b
= R
C
b
←C
a
X
C
a
+ t
C
b
←C
a
. (2)
3.2 Line Acquisition
At first, we need to detect lines in the image. We use
the line-segment extraction from (Witt and Weltin,
2013), but any other line-segment or line extraction
method would do. Prominent other approaches would
be the line-segment detector “LSD” (Gioi et al., 2010)
or Hough transformation-based approaches (Duda
and Hart, 1972). We only use line-segments with a
minimum length of 30 pixels.
It is worth mentioning that even if we extract line-
segments defined by two endpoints p
i
1
and p
i
2
, we
solely operate on the homogeneous line representa-
tion which can be calculated from l
i
= p
i
1
× p
i
2
in the
following steps.
3.3 Parallel Line Clustering
The goal of this phase is to cluster lines of an im-
age which are parallel in the world and to extract the
shared 3D line direction for each cluster. This prob-
lem is closely related to the vanishing point detection,
as the vanishing point v
i
of parallel lines is the pro-
jection of the 3D line direction d
C
(Hartley and Zis-
serman, 2004):
v
i
= Kd
C
(3)
We suggest to work directly with 3D line directions
d
C
and not with the 2D vanishing points. Working
in 3D space is beneficial, because it is independent
from the actual camera (perspective, fisheye etc.) and
allows an intuitive initialization of the clustering. In
(3), we introduced how the vanishing point and the 3D
line direction are related. Now, we have to transfer the
line l
i
into its corresponding 3D expression. The line
l
i
is the intersection of the image plane with the plane
Π
C
. Π
C
is the line’s equivalent for a ray and contains
the camera center and the observed 3D line L
C
, we
call this plane the “back-projected plane”. The nor-
mal vector of Π
C
is given by (Hartley and Zisserman,
2004):
n
C
=K
T
l
i
(4)
This relation is visualized in Figure 3.
l
i
L
C
Π
C
n
C
d
C
o
C
Figure 3: Visualization of the back-projection of an image
line l
i
. Π
C
is the back-projected plane with normal vector
n
C
. The observed world line L
C
has line direction d
C
.
Many of the vanishing point detection algorithms
employ the Expectation-Maximization (EM) cluster-
ing method (Dempster et al., 1977) to group im-
age lines with the same vanishing point (Antone and
Teller, 2000; Ko
ˇ
seck
´
a and Zhang, 2002). We got in-
spired by the work of Ko
ˇ
seck
´
a and Zhang (Ko
ˇ
seck
´
a
and Zhang, 2002) and we adapt their algorithm so that
it directly uses 3D line directions instead of vanishing
Relative Pose Estimation from Straight Lines using Parallel Line Clustering and its Application to Monocular Visual Odometry
425

points. This enables us to introduce a new and much
simpler initialization for the clustering in which we
directly set initial directions derived from the target
environment.
The EM-algorithm iterates the expectation and the
maximization step. In the expectation phase, the pos-
terior probabilities p(d
C
(k)
|n
C
( j)
) are calculated. The
posterior mirrors how likely a line l
i
( j)
(with plane
normal n
C
( j)
) belongs to a certain cluster k repre-
sented by direction d
C
(k)
. Bayes’s theorem is applied
to calculate the posterior:
p
d
C
(k)
|n
C
( j)
=
p
n
C
( j)
|d
C
(k)
p
d
C
(k)
p
n
C
( j)
(5)
We define the likelihood as
p
n
C
( j)
|d
C
(k)
=
1
q
2πσ
2
k
exp
−
n
C
( j)
T
d
C
(k)
2
2σ
2
k
(6)
The likelihood reflects that a 3D line in the camera
frame (and its direction d
C
( j)
) should lie in Π
C
( j)
and is therefore perpendicular to the plane normal
n
C
( j)
. If we substitute n
C
( j)
and d
C
(k)
with (3) and
(4), we come to a likelihood term in the 2D image
space which is the same as in the work of Ko
ˇ
seck
´
a
and Zhang (Ko
ˇ
seck
´
a and Zhang, 2002).
In the maximization step, the probabilities from
the expectation step stay fixed. The direction vectors
are in this phase re-estimated by maximizing the ob-
jective function:
argmax
d
C
(k)
∏
j
p
n
C
( j)
= argmax
d
C
(k)
∑
j
log p
n
C
( j)
(7)
with
p
n
C
( j)
=
∑
k
p
d
C
(k)
p
n
C
( j)
|d
C
(k)
(8)
As pointed out in (Ko
ˇ
seck
´
a and Zhang, 2002), in
the case of a Gaussian log-likelihood term, which is
here the case, the objective function is equivalent to a
weighted least squares problem for each d
C
(k)
:
d
C
(k)
= argmin
d
C
∑
j
p
n
C
( j)
|d
C
n
C
( j)
T
d
C
2
(9)
After each EM-iteration, we delete clusters with less
than two assignments to gain robustness.
For initialization, we define a set of 3D directions
which are derived from the targeted environment as
follows: We apply our method in indoor scenes, hence
we find the three dominant directions of the “Manhat-
tan world”. In addition, the camera is mounted point-
ing forward with no notable tilt or rotation against
the scene, therefore we use the three main directions
(1 0 0)
T
, (0 1 0)
T
, (0 0 1)
T
for initialization. For ro-
bustness, we add all possible diagonals like (1 1 0)
T
,
(1 − 1 0)
T
, . . . , (1 1 1)
T
(e.g. to capture the staircase
in Figure 4b) ) and end up with overall 13 line direc-
tions. All line directions are normalized to unit length
and have initially the same probability. The variance
of each cluster is initially set to σ
2
k
= sin
2
(1.5°) which
reflects that the plane normal and the direction vec-
tor should be perpendicular up to a variation of 1.5°.
Note that this derivation of initial directions is easily
adoptable for other scenes or camera mountings. If
the camera is for example mounted in a rotated way,
we can simply rotate the directions accordingly. If
such a derivation is not possible, we suggest to use
the initialization technique proposed in (Ko
ˇ
seck
´
a and
Zhang, 2002) where the initial vanishing points are
calculated directly from the lines in the image.
If we process an image sequence, we additionally
use the directions estimated from the last image in the
initialization as “direction priors”. In this case, we
assign these priors a higher probability.
Results from the clustering step are visualized in
Figure 4.
(a) (b)
Figure 4: Results of the parallel line clustering. Lines with
the same color belong to the same cluster and are parallel
in 3D. Each cluster has a 3D direction vector d
C
assigned
which represents the line direction viewed from this image.
3.4 Guided Line Matching
In this section, we describe the matching of lines be-
tween two images. As we have clustered parallel lines
in both images, we can use this information to guide
the matching, so that only clusters of lines with corre-
sponding 3D direction are considered.
For this, we need to establish correspondences be-
tween the 3D line directions (the clusters) of the two
images. This is done using RANSAC.
The mathematical basis for the algorithm is that
the transformation of a direction d
C
1
from the first
camera to the direction d
C
2
in the second camera de-
VISAPP 2016 - International Conference on Computer Vision Theory and Applications
426

pends only on the rotation R
C
2
←C
1
:
d
C
2
= R
C
2
←C
1
d
C
1
(10)
In the presence of noise, this equation does not hold,
so we use the angular error ε between the directions:
ε = arccos
d
T
C
2
R
C
2
←C
1
d
C
1
kd
C
1
kkd
C
2
k
!
(11)
The RANSAC process tries to hypothesize a rota-
tion which has a low angular error over a maximized
subset of all possible correspondences. A rotation can
be hypothesized from two randomly selected direc-
tion correspondences as described in 3.5.1. The idea
behind this procedure is that only the correct set of
correspondences yields a rotation matrix with small
angular errors. Therefore, the correct rotation matrix
only selects the correct correspondences into the con-
sensus set.
The method has one drawback: it happens always
that different rotation hypotheses with different sets of
correspondences result in the same angular error. This
happens especially in an “Manhattan world” environ-
ment. This ambiguity is illustrated in Figure 5. As we
R
1
R
2
???
Figure 5: Ambiguity in the direction matching. Which is the
correct correspondence assignment for the directions from
the left to the right? In this setting, the angular errors for R
1
and R
2
are the same.
have no other sensors in our system to resolve these
ambiguities, we assume small displacements between
the images and therefore restrict the allowed rotation
to less than 45°. As we target a visual odometry sys-
tem, this is a valid assumption. Alternatively, if e.g.
an IMU is present, its input could also be used.
Once the correspondences between the directions
(the clusters) are determined, lines in the correspond-
ing clusters can be matched. To match the lines, we
apply a descriptor-based matching using the LEHF
descriptor from Hirose and Saito (Hirose and Saito,
2012). Here, the gradients in the neighborhood of
a line are arranged in histograms which are com-
bined to form the descriptor. The distance between
two descriptors is simply the euclidean distance. We
add a global threshold of 0.4 and a left-right consis-
tency check (LRC) (Wang et al., 2009) to robustify
the matching.
Compared to a brute-force matching, we can re-
duce the search space for each line to the correspond-
ing cluster and gain robustness.
3.5 Relative Pose Estimation
As the lines between two images are now matched,
we can estimate the relative motion T
C
2
←C
1
=
[R
C
2
←C
1
, t
C
2
←C
1
] between the two camera locations.
We split the estimation into two steps: at first, the ro-
tation is estimated using only the line direction corre-
spondences. Then, the translation is calculated rely-
ing on the rotation and intersection points.
3.5.1 Rotation Estimation from Line Directions
As shown in (10), the transformation of a 3D line di-
rection depends only on the rotation. Given m corre-
sponding (and possible noisy) directions, we want to
find the rotation R
C
2
←C
1
which minimizes
R
C
2
←C
1
= argmin
R
k
D
C
2
− RD
C
1
k
(12)
where D
C
1
and D
C
2
are 3 × m matrices which contain
in each column the corresponding directions. This
problem is an instance of the “Orthogonal Procrustes
Problem” (Gower and Dijksterhuis, 2004). We em-
ploy the solution presented by Umeyama (Umeyama,
1991) which returns a valid rotation matrix as result
by enforcing det(R
C
2
←C
1
) = 1:
R
C
2
←C
1
= USV
T
(13)
with
UDV
T
= svd
D
C
2
D
T
C
1
(14)
S =
1 0 0
0 1 0
0 0 sign(det(U)det(V))
(15)
At least two non-collinear directions are required
to calculate a solution. This algorithm is used in the
RANSAC of the guided matching step (cf. 3.4). In
practice, the rotation is already estimated there and
we do not have to compute it again.
3.5.2 Translation Estimation from Intersection
Points
The translation is estimated in the same way as pro-
posed by Elqursh and Elgammal (Elqursh and El-
gammal, 2011). Intersection points of coplanar 3D-
lines are invariant under projective transformation and
therefore fulfill the epipolar constraint (Hartley and
Zisserman, 2004):
p
T
i
2
K
−T
[t
C
2
←C
1
]
×
R
C
2
←C
1
K
−1
p
i
1
= 0 (16)
If two intersection point correspondences and the rel-
ative rotation are given, the epipolar constraint equa-
tion can be used to solve t
C
2
←C
1
up to scale.
Relative Pose Estimation from Straight Lines using Parallel Line Clustering and its Application to Monocular Visual Odometry
427

As we have no knowledge which intersection
points from all
n(n−1)
2
possibilities (with n the number
of line correspondences) belong to coplanar lines, we
follow the idea from (Elqursh and Elgammal, 2011)
and use RANSAC to select the correct correspon-
dences from all possible combinations while mini-
mizing the Sampson distance defined in (Hartley and
Zisserman, 2004). In contrast to (Elqursh and Elgam-
mal, 2011), we can reduce the initial correspondence
candidates as we take the clusters into account and
only calculate intersection points between lines of dif-
ferent clusters.
As errors on the rotation directly influence the
translation estimation, we use the inlier intersection
points from the RANSAC step for a nonlinear opti-
mization of the overall pose.
4 APPLICATION: VISUAL
ODOMETRY
Now we introduce a visual odometry system using the
presented relative pose estimation algorithm.
The pipeline is pictured in Figure 6.
Parallel line
clustering
Line acquisition
Guided
matching
Relative pose estimation
Relative rotation
estimation
Relative translation
estimation
Scale adjustment
Update trajectory
Images
Distance
measure
Figure 6: Processing pipeline for the visual odometry.
For each successive pair of images from the in-
put stream, the described relative pose estimation is
executed. If for some reason (e.g. not enough line
matches found) the relative pose estimation fails, we
use the previously estimated relative pose. As the rel-
ative pose has no global scale, we need to adjust it
to reflect the real distance traveled. We get these dis-
tance measures from other sensors, like wheel odom-
etry which is common on robotic platforms. Once the
relative motion is properly scaled, we update the tra-
jectory.
We want to mention that this is a very basic ap-
proach using only information from two successive
frames. The robustness could be improved signifi-
cantly by using more images (e.g. tracking lines over
multiple images and doing a sliding-window bundle-
adjustment on the relative poses). We will focus on
that in our future work.
5 EVALUATION
For our experiments, we use synthetic and real image
sequences. For the synthetic data, we created a typical
indoor scene with a 3D wireframe model and gener-
ated images from it by projecting the line-segments
from the model into a virtual pinhole camera. The
generated sequence consists of 1503 images. Exam-
ple images are shown in Figure 7.
(a) (b)
Figure 7: A synthetic images showing a typical indoor sce-
nario.
To see how image noise affects the processing, we
add Gaussian noise on the image lines. We do not add
noise on the endpoints of the line-segments, because
this effects segments of various length differently. We
rather rotate the segments around their center point,
where σ is the standard deviation of the rotation in
degree.
For the experiments on real data, we recorded a
circular sequence in a typical office environment, us-
ing an AVT Guppy camera mounted on top of a robot.
The image resolution is 1032 × 778 pixel. The total
distance of the “Office Circle” sequence is about 70 m
and 1735 images. Example images from the sequence
are depicted in Figure 8.
(a) (b)
Figure 8: Examples from the sequence “Office Circle”.
Note the textureless environment in (a) and (b).
In addition, we use the “Corridor” sequence from
VISAPP 2016 - International Conference on Computer Vision Theory and Applications
428
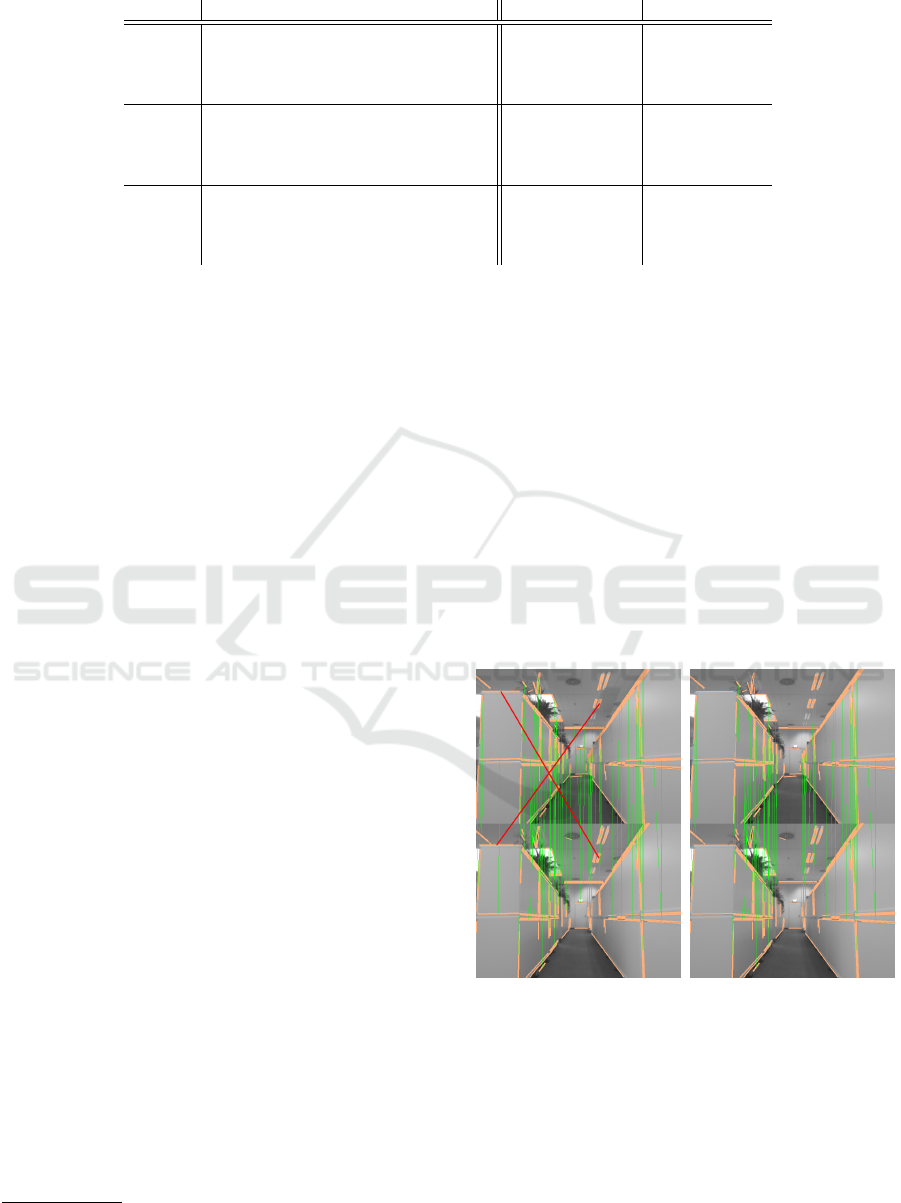
Table 1: Evaluation of the parallel line clustering and the estimated line directions on the synthetic data.
σ (in °) Cluster Initialization Avg. error (in °) Std. dev. (in °)
0.0 Predefined directions 0.4458 3.9923
0.0 Predefined directions + priors 0.0005 0.0018
0.0 Ko
ˇ
seck
´
a and Zhang’s method 4.9025 12.3382
0.0 Ko
ˇ
seck
´
a and Zhang’s method + priors 0.0052 0.1275
0.5 Predefined directions 3.2674 9.4691
0.5 Predefined directions + priors 0.5871 0.6741
0.5 Ko
ˇ
seck
´
a and Zhang’s method 9.2458 15.4053
0.5 Ko
ˇ
seck
´
a and Zhang’s method + priors 0.5890 0.6749
1.0 Predefined directions 5.8362 11.5567
1.0 Predefined directions + priors 2.8989 7.0723
1.0 Ko
ˇ
seck
´
a and Zhang’s method 10.8633 15.5824
1.0 Ko
ˇ
seck
´
a and Zhang’s method + priors 4.7644 9.7788
Oxford
2
which consists of 11 frames showing a cor-
ridor with attached ground truth poses. Although this
sequence is very short, other methods used it for eval-
uation which makes a direct comparison possible.
As our test setup is now introduced, we evaluate
the different steps of our processing pipeline. First,
the performance (5.1) and the computation time (5.2)
of the different proposed algorithms are analyzed.
Then (5.3), we evaluate the visual odometry system.
5.1 Performance of Proposed
Algorithms
5.1.1 Parallel Line Clustering
In this section, we propose to evaluate the accuracy
of the 3D line direction estimation using the synthetic
data with different noise levels.
For each image, the proposed parallel line clus-
tering is executed, and the calculated line directions
are compared to the ground truth. The comparison
is done by calculating the angular error between the
ground truth and the estimated direction. Since the
number of estimated clusters may differ from the ac-
tual number, we associate each estimated direction
vector with the ground truth direction which results
in the smallest angular error.
We evaluate our proposed initialization technique
where we predefine a set of directions for initializa-
tion (cf. 3.3) against the initialization approach pro-
posed by Ko
ˇ
seck
´
a and Zhang (Ko
ˇ
seck
´
a and Zhang,
2002) where the initial directions are estimated di-
rectly from the line observations in the image. We
also combine both techniques with “direction priors”
where the estimated directions from the previous im-
age are used additionally.
The results of this experiment are summarized in
Table 1. As expected, the accuracy of the estimation
2
http://www.robots.ox.ac.uk/˜vgg/data1.html
drops as more and more noise is added to the data.
On this kind of data, we clearly see that using our ini-
tialization gives better results compared to the method
from Ko
ˇ
seck
´
a and Zhang. It can also be seen that us-
ing direction priors is beneficial as the mean and stan-
dard deviation of the angular error is reduced. There-
fore we choose the “direction prior” strategy with pre-
defined directions for all following experiments.
5.1.2 Matching
We compare the brute-force matching to our proposed
guided matching in which only corresponding line
clusters are considered. An example is shown in Fig-
ure 9.
(a) Brute-force matching. (b) Guided matching.
Figure 9: Brute-force matching vs. guided matching. De-
tected lines are drawn in orange, matches are indicated by
green connections between bottom and top image. The
wrong matches (red lines) are avoided in the guided match-
ing because these lines have different 3D directions and be-
long to different clusters.
This example highlights that our proposed guided
matching approach is better in terms of robustness
than a brute-force matching.
Relative Pose Estimation from Straight Lines using Parallel Line Clustering and its Application to Monocular Visual Odometry
429

Table 2: Accuracy of the relative pose computation on the synthetic sequence.
Rotation error (in °) Translation error (in °)
Approach σ in ° Avg. Median Std. dev. Avg. Median Std. dev.
“Triplet” 0.0 0.388 0.066 1.006 60.568 55.947 50.488
Ours 0.0 0.008 0.000 0.017 41.019 0.054 55.156
“Triplet” 0.5 31.150 5.293 48.048 79.174 82.673 50.884
Ours 0.5 1.096 0.646 1.202 76.720 76.970 43.305
“Triplet” 1.0 35.049 6.597 49.967 84.459 86.723 46.080
Ours 1.0 3.264 1.368 6.048 82.161 83.711 45.271
5.1.3 Relative Pose Estimation
In this experiment, we compare the accuracy of our
relative pose computation with the “Triplet” approach
(Elqursh and Elgammal, 2011). We evaluate the rota-
tion and translation error between consecutive image
frames, where the rotation error is the rotation angle
of R
est
R
T
gt
and the translation error the angle between
the groundtruth translation vector and the estimated
translation. The results for the synthetic dataset are
listed in Table 2.
The rotation error of our approach is lower than
for the “Triplet” approach, which shows that our
method is more robust. Also, in the noise-free test the
translation error of our method is significantly lower
(median of 0° compared to 56°). For the tests under
noise, both translation errors rise a lot. This is be-
cause the intersection points in the images do not cor-
respond anymore and the epipolar constraint equation
therefore yields wrong results.
On the “Corridor” sequence, we estimate the ro-
tation with a mean error of 1.06°. The authors of the
“Triplet” approach reported a mean error of 1.3° (we
measured 0.97°). For the translation, we measured a
mean error of 15.54° for our method and 26.01° for
the “Triplet” algorithm as they do not reported this
value. We can deduce that our method is more accu-
rate in estimating the relative pose since the rotation
accuracy is similar and the translation is estimated
with higher accuracy.
Overall, we can conclude that our method outper-
forms the triplet approach in terms of accuracy and
robustness on synthetic and real data sequences.
5.2 Execution Times
In the following, we analyze the runtime of the dif-
ferent steps. All experiments were conducted on a
Intel® Xeon™ CPU with 3.2 GHz and 32 GB RAM.
The average execution times in milliseconds per im-
age are listed in Table 3.
For the matching itself, our proposed guided
matching and the brute-force approach have compa-
rable runtimes. But the guided matching requires
the clustering step, so we have to take the time for
the clustering into account. Combining the timings
of guided matching and clustering, we are slightly
slower than the brute-force matching. Nevertheless,
the higher robustness of the guided matching compen-
sates for the prolonged execution time.
Our approach for the relative pose estimation step
significantly outperforms the “Triplet” approach by
only requiring 0.9% to 3% of its runtime. This is due
to the fact that in the “Triplet” approach all possible
O(n
3
) triplet combinations (n is the number of line
matches) are generated and then tested in a RANSAC
scheme to calculate the rotation which is very time
consuming. Contrary to that, our estimation is based
on the precalculated line-directions of the clustering
step. As we normally extract only around 5 different
line directions, the rotation calculation is very fast.
Also the number of generated intersection points is
lower due to the restriction to intersection points gen-
erated from lines from different clusters. We conclude
that the additional runtime spent for the clustering is
largely compensated by the enormous improvement
in the relative pose estimation step.
5.3 Visual Odometry System
The preceding experiments showed that our proposed
algorithms give accurate results and are computa-
tional inexpensive. Hence, we plug them together
to create a robust and fast visual odometry system
(c.f. section 4) which is evaluated now.
We evaluate the visual odometry system on the
synthetic and real image sequences and compare it to
the results that one would reach when interchanging
the relative pose estimation block with the “Triplet”
approach.
The trajectories generated from noise-free syn-
thetic data applying the “Triplet” and our approach
are shown in Figure 10.
We analyze the root mean squared error (RMSE)
of the relative pose error (RPE) and the absolute tra-
jectory error (ATE) introduced by Sturm et al. (Sturm
et al., 2012) in Table 4. The RPE is calculated be-
tween two consecutive frames.
VISAPP 2016 - International Conference on Computer Vision Theory and Applications
430
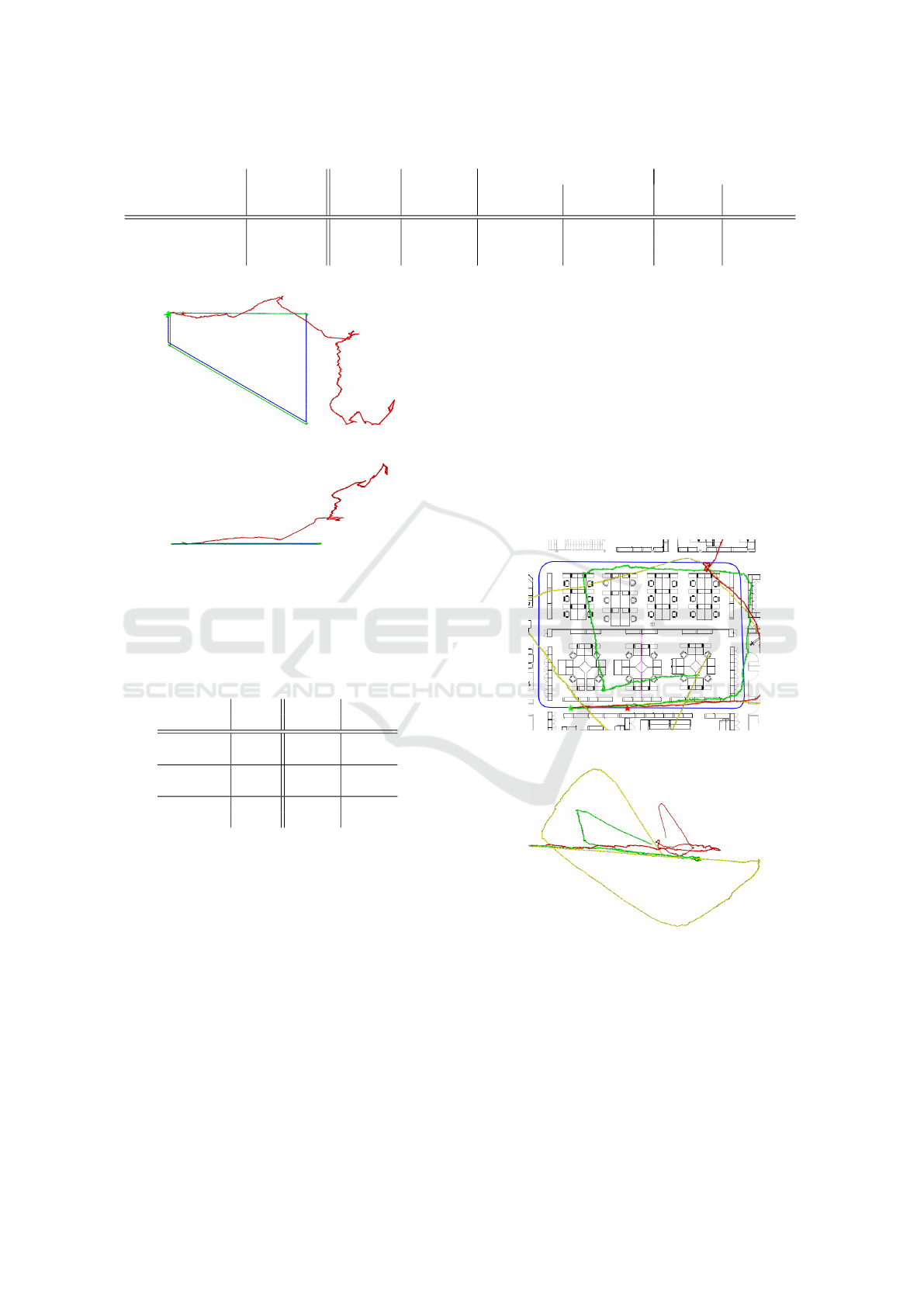
Table 3: Average execution times in milliseconds.
Matching Rel. Pose Estimation
Sequence Avg. lines
per image
Line Ac-
quisition
Clustering Brute-Force Guided (our) “Triplet” Our
Synthetic (σ = 0°) 31.32 - 0.65 - - 501.38 10.06
Office Circle 121.35 46.24 6.35 3.71 3.73 3230.76 28.29
Corridor 120.09 34.28 18.22 3.17 3.49 639.27 16.71
(a) Top view.
(b) Side view.
Figure 10: Top view and side view on the trajectories gen-
erated with the “Triplet” approach (red) and our approach
(green) of the synthetic image sequence. The ground truth
path is drawn in blue. Start and endpoint are represented by
the green and red star.
Table 4: RPE / ATE analysis on the synthetic sequence.
RPE ATE
Approach σ in ° RMSE RMSE
“Triplet” 0.0 0.073 22.577
Ours 0.0 0.044 0.419
“Triplet” 0.5 0.099 21.901
Ours 0.5 0.093 13.466
“Triplet” 1.0 0.106 23.113
Ours 1.0 0.101 19.038
Trajectories and analysis of RPE and ATE show
that our method succeeds much better in reconstruct-
ing the ground truth trajectory as the “Triplet” ap-
proach.
The average runtime per image is for the triplet
approach 524 ms and for our approach 26 ms.
For the real data sequences, we compare our
method also to a point-based approach using SIFT
(Lowe, 2004) feature matching and a RANSAC-based
5-point-algorithm (Nister, 2004) for relative pose esti-
mation. We are aware that there are better point-based
visual odometry systems (e.g. using sliding-window
bundle adjustment) but we choose this approach since
it is very similar from its structure.
For the “Corridor” sequence, our method results in
an RPE of 0.027 and an ATE of 0.052. For the triplet
approach we measure an RPE of 0.046 and ATE of
0.079. Using the point-based approach, the RPE is
0.007 and the ATE 0.010. This confirms the previous
experiments that our method has a higher accuracy
then the “Triplet” approach. But on this sequence, the
point-based approach is clearly better as the images
are textured and enough points are detected.
The average runtime per image is for the triplet ap-
proach 687 ms, for the point-based approach 282 ms
and for our approach 73 ms.
The result for the office sequence is presented in
Figure 11.
(a) Top view.
(b) Side view.
Figure 11: Top view and side view on the trajectories gen-
erated with the “Triplet” approach (red) and our approach
(green) and the 5-point-algorithm (yellow) of the “Office
Circle” sequence. The original path is drawn in blue. Start
and endpoint are represented by the green and red star.
For the “Office Circle” sequence, the “Triplet” ap-
proach fails to reconstruct the path completely shortly
after the first corner. In addition, the relative pose esti-
mation fails two times. The same can be observed for
Relative Pose Estimation from Straight Lines using Parallel Line Clustering and its Application to Monocular Visual Odometry
431

the point-based approach, here it fails four times be-
cause too few SIFT feature matches are found. Con-
trary, our algorithm processes the whole sequence.
We observe, that with our algorithm the reconstructed
trajectory resembles the true trajectory the most, since
it has almost a rectangular form and less variation in
the height dimension then the other approaches. This
indicates that our rotation estimation is more robust.
Please note that due to inaccurate distance measure-
ments of our robot, the overall scaling of the trajecto-
ries is not correct.
The average runtime per image on the “Office Cir-
cle” sequence is for the triplet approach 3277 ms, for
the point-based approach 146 ms and for our approach
85 ms.
We can conclude that our method is better suited
for the visual odometry task than the “Triplet” ap-
proach. We also demonstrated that in low textured
environments a line-based approach can function as
replacement for point-based relative pose estimation.
6 CONCLUSION
In this paper, we presented a novel relative pose esti-
mation scheme using lines. In our approach, we esti-
mate the 3D line directions through a clustering step
of parallel lines in the world and use this information
throughout the whole processing pipeline. The direc-
tion information is used to guide the line matching
and to calculate the relative rotation. We also pre-
sented a visual odometry using our relative pose esti-
mation.
As the 3D line direction estimation is such an im-
portant step, we evaluated it on synthetic data and
showed how the usage of “direction priors” in a se-
quential processing boosts the accuracy.
Furthermore, we compared our relative pose esti-
mation to the state-of-the-art approach from Elqursh
and Elgammal (Elqursh and Elgammal, 2011). We
showed that our method outperforms theirs in terms
of accuracy and runtime. Especially the runtime can
be reduced from seconds to milliseconds.
The visual odometry system is evaluated and com-
pared to the state-of-the-art for line-based relative
pose estimation (Elqursh and Elgammal, 2011) and a
comparable point-based algorithm (Nister, 2004). We
showed that our method is better applicable in tex-
tureless indoor scenarios than both other approaches.
In the future, we want to extend our approach to a
complete SLAM system. To reach this goal, we need
to relax the restriction to small motions in the guided
matching step. How this could be done is future work.
REFERENCES
Antone, M. E. and Teller, S. (2000). Automatic recovery
of relative camera rotations for urban scenes. In IEEE
Conference on Computer Vision and Pattern Recogni-
tion. CVPR 2000, pages 282–289.
Bartoli, A. and Sturm, P. (2005). Structure-from-motion
using lines: Representation, triangulation, and bundle
adjustment. Computer Vision and Image Understand-
ing, 100(3):416–441.
Bazin, J., Demonceaux, C., Vasseur, P., and Kweon, I.
(2010). Motion estimation by decoupling rotation and
translation in catadioptric vision. Computer Vision
and Image Understanding, 114(2):254–273.
Dempster, A. P., Laird, N. M., and Rubin, D. B. (1977).
Maximum likelihood from incomplete data via the em
algorithm. Journal of the Royal Statistical Society. Se-
ries B (Methodological), pages 1–38.
Duda, R. O. and Hart, P. E. (1972). Use of the hough trans-
formation to detect lines and curves in pictures. Com-
munications of the ACM, 15(1):11–15.
Elqursh, A. and Elgammal, A. (2011). Line-based relative
pose estimation. In 2011 IEEE Conference on Com-
puter Vision and Pattern Recognition (CVPR), pages
3049–3056.
Fischler, M. A. and Bolles, R. C. (1981). Random sample
consensus: a paradigm for model fitting with appli-
cations to image analysis and automated cartography.
Communications of the ACM, 24(6):381–395.
Gioi, R. v., Jakubowicz, J., Morel, J.-M., and Randall, G.
(2010). Lsd: A fast line segment detector with a false
detection control. IEEE Transactions on Pattern Anal-
ysis and Machine Intelligence, 32(4):722–732.
Gower, J. C. and Dijksterhuis, G. B. (2004). Procrustes
problems, volume 3. Oxford University Press.
Hartley, R. I. (1994). Projective reconstruction from line
correspondences. In Proceedings of IEEE Conference
on Computer Vision and Pattern Recognition, pages
903–907.
Hartley, R. I. and Zisserman, A. (2004). Multiple View Ge-
ometry in Computer Vision. Cambridge University
Press, ISBN: 0521540518, second edition.
Hirose, K. and Saito, H. (2012). Fast line description for
line-based slam. In Bowden, R., Collomosse, J., and
Mikolajczyk, K., editors, British Machine Vision Con-
ference 2012, pages 83.1–83.11.
Ko
ˇ
seck
´
a, J. and Zhang, W. (2002). Video compass. In Goos,
G., Hartmanis, J., Leeuwen, J., Heyden, A., Sparr, G.,
Nielsen, M., and Johansen, P., editors, Computer Vi-
sion — ECCV 2002, volume 2353 of Lecture Notes
in Computer Science, pages 476–490. Springer Berlin
Heidelberg, Berlin, Heidelberg.
Lowe, D. G. (2004). Distinctive image features from scale-
invariant keypoints. International Journal of Com-
puter Vision, 60(2):91–110.
Nister, D. (2004). An efficient solution to the five-point
relative pose problem. IEEE Transactions on Pattern
Analysis and Machine Intelligence, 26(6):756–770.
VISAPP 2016 - International Conference on Computer Vision Theory and Applications
432

Schindler, G., Krishnamurthy, P., and Dellaert, F. (2006).
Line-based structure from motion for urban envi-
ronments. In Third International Symposium on
3D Data Processing, Visualization, and Transmission
(3DPVT’06), pages 846–853.
Sturm, J., Engelhard, N., Endres, F., Burgard, W., and Cre-
mers, D. (2012). A benchmark for the evaluation of
rgb-d slam systems. In 2012 IEEE/RSJ International
Conference on Intelligent Robots and Systems (IROS
2012), pages 573–580.
Umeyama, S. (1991). Least-squares estimation of transfor-
mation parameters between two point patterns. IEEE
Transactions on Pattern Analysis and Machine Intel-
ligence, 13(4):376–380.
Wang, G., Wu, J., and Ji, Z. (2008). Single view based
pose estimation from circle or parallel lines. Pattern
Recognition Letters, 29(7):977–985.
Wang, L., Neumann, U., and You, S. (2009). Wide-baseline
image matching using line signatures. In 2009 IEEE
12th International Conference on Computer Vision
(ICCV), pages 1311–1318.
Weng, J., Huang, T., and Ahuja, N. (1992). Motion and
structure from line correspondences; closed-form so-
lution, uniqueness, and optimization. IEEE Transac-
tions on Pattern Analysis and Machine Intelligence,
14(3):318–336.
Witt, J. and Weltin, U. (2013). Robust stereo visual odom-
etry using iterative closest multiple lines. In Proceed-
ings of the IEEE/RSJ International Conference on In-
telligent Robots and Systems, page XX.
Zhou, H., Zou, D., Pei, L., Ying, R., Liu, P., and Yu, W.
(2015). Structslam: Visual slam with building struc-
ture lines. IEEE Transactions on Vehicular Technol-
ogy, page 1.
Relative Pose Estimation from Straight Lines using Parallel Line Clustering and its Application to Monocular Visual Odometry
433
