
Multi-robot Systems, Machine-Machine and Human-Machine
Interaction, and Their Modelling
Ulrico Celentano and Juha R
¨
oning
Biomimetics and Intelligent Systems Group, Faculty of Information Technology and Electrical Engineering,
University of Oulu, P.O. Box 4500, FI-90014, Oulu, Finland
Keywords:
Cognition and Metacognition, Cognitive Agents, Interworking Cognitive Entities, Multi-robot Systems,
Social Interaction.
Abstract:
The control of multi-agent systems, including multi-robot systems, requires some level of context and envi-
ronment awareness as well as interaction among the interworked cognitive entities, whether they are artificial
or natural. Proper specification of the cognitive functionalities and of the corresponding interfaces helps in
achieving the capability to reach interoperability across different operational domains, and to reuse the system
design across different application domains. The model for interworking cognitive entities presented in this
article, which includes explicitly interworking capabilities, is applied to two major classes of interaction in
multi-robot systems. Being the model inspired by both artificial and natural systems, makes it suitable for
both machine-machine and human-machine interaction.
1 INTRODUCTION
The management or self-management of a multi-
robot system (MRS) requires interaction among all
the involved interworked entities. At scattered en-
tities, awareness of own environment and context is
needed, and forms of distributed decision-making are
possible. More, a MRS may realise various dis-
tributed sensor-actuator configurations since action at
one entity may be based (also) on perceptions at other
entities.
In a number of use cases, not only machine-
machine but also human-machine interaction is
present, hence both artificial and natural cognitive en-
tities interact and their role as supervisor or as an ob-
ject may change depending on use case or context.
Embedding humans into the overall system allows
taking into account their needs, capabilities and limi-
tations, with an effect on the system architecture and
the interfaces within the entire social ecosystem.
Discussion on the specification of the interfaces is
needed because it may help interoperability of a sys-
tem across operational domains and even in reusing
system design across different application domains.
After having introduced in Sect. 3 multi-entity in-
telligent systems, this article starts building upon the
identification in Sect. 4 of the issues related to the
control of multi-robot systems as interworking cog-
nitive entities and continues presenting in Sect. 5 a
model for those constituent elements. For what seen
above, a model should be as holistic as possible to
encompass particularities of both artificial and natu-
ral cognitive entities. An example instantiation of the
cognitive model in a multi-robot system scenario is il-
lustrated in Sect. 6, whereas Sect. 7 discusses a com-
parative evaluation of the model. The core part in the
above sections is preceded by a review of related work
and other background in Sect. 2, and concluded by a
discussion in Sect. 8.
2 BACKGROUND
Decision-making based on situational awareness re-
quires interaction of multiple entities. Interoperabil-
ity of informative systems is recognised as a cru-
cial aspect in multinational, co-operative command
and control (C2) operations, including peace-keeping.
Related standardisation activity is promoted for ex-
ample by the Simulation Interoperability Standards
Organization (SISO)
1
. Interoperability is also one of
the goal of the standardisation work done within the
Third Generation Partnership Project (3GPP) to en-
able Long-Term Evolution (LTE) wireless communi-
1
http://www.sisostds.org/. Last accessed 9 Sep 2015.
118
Celentano, U. and Röning, J.
Multi-robot Systems, Machine-Machine and Human-Machine Interaction, and Their Modelling.
DOI: 10.5220/0005667801180125
In Proceedings of the 8th International Conference on Agents and Artificial Intelligence (ICAART 2016) - Volume 1, pages 118-125
ISBN: 978-989-758-172-4
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

cation system for public safety.
Cognitive processes – essentially involving per-
ception, decision-making and action – are fundamen-
tal components in robot systems and human-machine
interaction. Related models – see (Celentano, 2014;
Celentano and R
¨
oning, ms) for a wider and deeper
review – date back to years 1939 for quality control
in industrial production (Shewhart, 1939), and 1945
for problem solving (Polya, 1957). These are both
four-phase models: plan, do, check, act; and under-
stand the problem, devise a plan, carry out the plan,
look back; respectively. Models for robotics started
also with three-four phase models – sense, (model),
plan, act – (Nilsson, 1984) but got then radically re-
vised by the introduction of the subsumption architec-
ture, decomposing phases into elementary behaviours
(Brooks, 1986). The adaptive control of thought-
rational (ACT-R) architecture was developed for hu-
mans but it was also applied to human-machine inter-
action (Anderson et al., 2004; Langley et al., 2009).
Specifically for C2 decision-making, John Boyd
devised a model to understand adversaries – the
observe-orient-decide-act (OODA) loop – further
adapted to cognitive radios and extended (Thomas
et al., 2005, e.g.) by Mitola (Mitola, 2000). A follow-
ing proposal was the critique-explore-compare-adapt
(CECA) model (Bryant, 2004). Its last three phases
have similar duties as in the OODA model, but the
critique makes the model more proactive. Whereas
in the CECA model plan serves as a sort of initialisa-
tion phase before the context acquisition takes place,
in (Mitola, 2000) it is used to take further actions as
a consequence of the acquired context information.
We may observe that OODA regulates the actions,
whereas CECA regulates the plan.
The definition of a robot operating system dates
back at least to 1984, with the control of a single
robot but integrated into a system comprising sensors
and humans (Dupourqu
´
e, 1984). Various operating
systems (Kerr and Nickels, 2012) and architectures
(M
¨
aenp
¨
a
¨
a et al., 2004, e.g.) have been proposed, with
the open-source robot operating system ROS been re-
cently used for multi-robot systems. ROS is devel-
oped for large-scale robot systems and is realised as
a peer-to-peer topology of processes running on sepa-
rate hosts and interconnected together (Quigley et al.,
2009). ROS nodes communicate by messages. Al-
though message structure can be customised, some
message structures are encouraged to be adopted to
enable interoperability.
A multi-robot system may be part of a larger
ecosystem, possibly together with humans sometimes
having a supervisory role, or embedded into the sys-
tem with a peer role (Peschl et al., 2012). Under
SISO, the battle management language (BML) has
been designed as a human readable, unambiguous
language to control robots integrated in an interna-
tional warfare system, including interaction among
command and control systems, human units and
robots (Rein et al., 2009).
3 MULTI-ENTITY INTELLIGENT
SYSTEMS
A generic model applicable to both artificial and nat-
ural entities is welcome since it is more easily appli-
cable to systems in which both machines and humans
are possibly present, see previous sections. Moreover,
such a model also helps in more effectively bridging
natural and artificial systems by exporting knowledge
across these domains. A generic model is presented
and discussed in this article, together with example
applications of it.
Roughly, but see Sect. 5 and 7 for details, an in-
telligent system such as a robot or a human has three
main functions: observation, decision-making and ac-
tion execution. Many peculiarities and implications
are involved in the action execution part. They in-
clude for example, in the case of robots, the practi-
cal actuation and the fine control of system dynamics.
These aspects are left out of the scope of this arti-
cle. On the contrary, central of interest in this article
are decision-making and the necessary awareness de-
rived from observations, see the illustrative examples
in Sect. 4 and 6.
An important contribution of this article concerns
the social interaction in multi-entity intelligent sys-
tems, see Sect. 5 and examples in Sect. 6.
Natural interfaces are created in a multi-entity
cognitive system. For flexible and reusable design
purposes it is an advantage to specify interfaces also
for functions internal to an entity. This is facilitated
by the specification of the duties of cognitive func-
tions, see Sect. 5.
4 CONTROL OF COGNITIVE
MULTI-ROBOT SYSTEMS
Multi-robot systems often require forms of co-
operation, collaboration or co-ordination among the
entities, such as collision-avoidance (Remmersmann
et al., 2010) or flocking control (La et al., 2015), and
for those inter-robot interaction is needed. Robots
may possess various levels of cognition; see for ex-
ample (Celentano, 2014).
Multi-robot Systems, Machine-Machine and Human-Machine Interaction, and Their Modelling
119

The most straightforward way to implement the
above forms of interaction is to let any entity to ob-
serve the actions (e.g., position and movement) of the
other robots. Robots in this case sense the actuations
of the other robots. Although in some cases prediction
of actions (e.g. trajectories) of the other robots is pos-
sible, if tasks/plans of the other robots are unknown,
or they are dynamically adapted (e.g. to avoid obsta-
cles on the terrain), prediction may be impossible or
inaccurate, see Fig. 1 and Fig. 2.
(a) (b)
Figure 1: An example about self/non-self-awareness.
Fig. 1 illustrates an example about self/non-self-
awareness. While the resulting relative configuration
of the system is the same in both cases, on the left the
displacement is caused by a movement of the marked
robot (darker grey circle), and on the right it is due
to the rest (lighter grey circles). The situation may
be more complicated if not all of the lighter grey en-
tities are synchronised. In any case, absolute posi-
tioning may be used in this example, but in general it
may be quicker or more exact, or even feasible (abso-
lute positioning may not always be available or it may
not have the required resolution), deducting the cause
from shared information.
Figure 2: A fleet of robots with one avoiding an obstacle.
Fig. 2 shows a fleet of robots with one entity
avoiding an obstacle. Despite the lead robot (darker
grey circle) changes its course (to avoid an obsta-
cle, straight solid line), the rest of the system (lighter
grey circles) follows the originally agreed path, hav-
ing been instructed (dashed circles) about the reason
of the change.
The examples above are about managing be-
havioural anomalies (abnormalities in group dynam-
ics), i.e., it is of interest to understand whether the rea-
son for the anomaly is due to our entity or to the other.
Similar decisions are needed for example in inter-
vehicle coordination, which can be realised through
warnings for man-controlled vehicles, or as part of
their control, also applicable to unmanned vehicles.
In decision making, explicit coordination can be ex-
ploited (for example by inter-entity communications,
like in Fig. 2), or implicit information can be used (by
self-awareness, like in the scenario of Fig. 1).
In general, three forms of interaction can be iden-
tified in an MRS: act-and-observe (robots observe the
actions of other robots), share-and-act (robots act af-
ter negotiation of their actions), act-while-checking
(robots behave initially as in the first case, but refine
their operations as in the following case).
As noted, sharing part of robot’s own plans is a
way to improve coexistence within a multi-robot sys-
tem. In this case, actions are based on exchange of in-
formation among robots, rather than observing their
decisions (actions, movements). Indeed, misalign-
ments due to own or other’s errors require different
responses; this means that self/nonself discrimination,
discussed above, is needed.
From the above examples it is derived that robots
may need to share their knowledge (and or plans).
5 MODEL FOR COGNITION
This section presents our model (Celentano, 2014)
that introduces the required phases missing from
those in the literature (Sect. 2 and references therein).
The specification of cognitive functionalities
should respond to the needs outlined in Sect. 1. To
this end, in our model presented here, the definition
of functionalities – and as a consequence of the in-
terfaces – is done in such a way that cognitive func-
tions are neatly assigned to specific units or physical
elements within it. The phases of the cognitive entity,
i.e., the components instantaneously active in the cog-
nitive process, are defined considering also their role
in relation to the environment they operate within.
It is obvious that what is an action for one entity
may be a perception for another. However, interaction
of a cognitive entity with its environment is not lim-
ited to initial observation and final action events but it
includes also interaction with intermediate cognitive
phases in which more cognitive entities are involved.
It is important to note that in general the interaction
of the cognitive entities with their environment occurs
during the cognitive process and not necessarily only
at its start or end (i.e., at perception or action, respec-
tively). This sharing of information, or knowledge,
or sometimes commands – in this article, a piece of
information or knowledge or a command are together
ICAART 2016 - 8th International Conference on Agents and Artificial Intelligence
120
referred to as instructions – takes possibly place be-
fore the actual actions are taken and therefore cannot
be modelled as act-perceive interactions. New cogni-
tive phases are needed for that.
Cognitive phases are divided into functionali-
ties dealing with exchanging facts and implement-
ing competences, and those in charge of processing
knowledge, making decisions and learning. Metacog-
nition is the knowledge about the cognitive phenom-
ena (or knowledge of cognition) and the regulation of
the cognition processes.
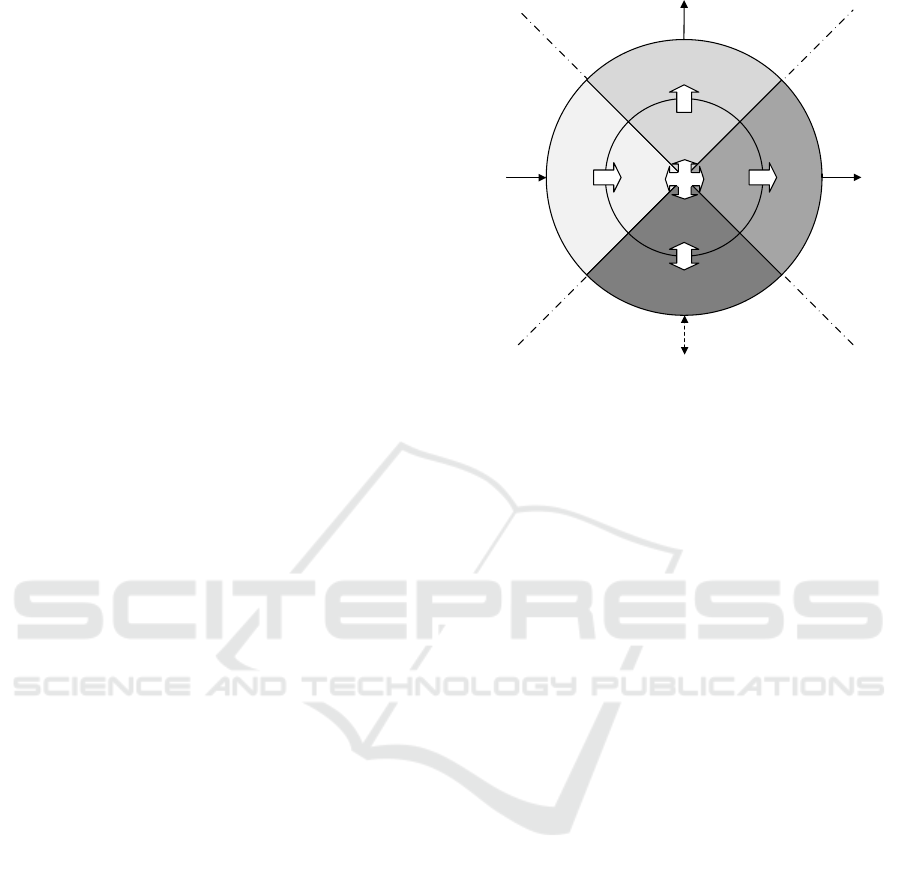
The phases of our model presented in this article
are grouped under two layers:
• a cognitive frontier (represented by the outer cir-
cle in Fig. 3), in charge of interaction with exter-
nal entities in the process of:
– acquiring (raw) information (sometimes re-
ferred to as data),
– storing and fetching accumulated knowledge,
– sharing instructions, and
– actuating decisions;
• a metacognitive hub (represented by the inner
disc in Fig. 3), in charge of controlling cognitive
phenomena and cognitive actions, i.e., of the in-
terwork of the internal processes in:
– processing the acquired information,
– building knowledge from experience (both
from outside information/knowledge and own
decisions),
– preparing instructions, and
– generating the needed decisions.
The metacognitive hub generates a new level of in-
formation. For example, the correlation between the
decide phase with the perceive for an endogenous
stimulus to discriminate self/nonself happens near the
boundary of the metacognitive hub.
Fig.3 shows our model for a networked cognitive
entity. Four categories span across two layers. En-
tity’s input u, output y, internal state y, stored knowl-
edge z and shared instructions (information, knowl-
edge or commands) x are also shown in the figure.
The phases introduced above belong to the fol-
lowing four categories (represented by the sectors in
Fig. 3):
• observation (perceive, analyse),
• consolidation (learn, remember),
• interworking (synthesise, share) and
• operation (decide, apply).
The phases are respectively linked across the cog-
nitive frontier and the metacognitive hub, as sum-
marised in Table 1.
perceive
analyse
decide
apply
share
synthesise
learn
remember
y
z
u v
x
OBSERVATION
OPERATION
INTERWORKING
CONSOLIDATION
Figure 3: Model for a networked cognitive entity. Revised
from (Celentano, 2014).
We can say that the cognitive entity has observ-
able information u that is used to store knowledge
z and operate instructions v. Instructions, i.e., in-
formation, knowledge or commands x, can be exter-
nalised. All the above – u, v, z and x – are at the
border of the cognitive entity. The internal steps, oc-
curring at the boundary between the cognitive frontier
and the metacognitive hub, imply the presence of, re-
spectively, perceived information
˜
u, learnt knowledge
˜
z, decision
˜
v and synthesised instructions
˜
x. Every-
thing within the core of the metacognitive hub con-
tributes to the internal state y of the cognitive entity.
Fig. 3 illustrates the above notation with the model.
The nature of the modelled system has an impact on
the architecture of the cognitive frontier.
The interaction of a cognitive entity with other
entities or its environment occurs with different di-
rections in different phases, which has an impact on
the realisation of those phases in a cognitive device.
The cognitive entity gathers inputs or stimuli from
an outside entity or the environment, in the perceive
phase, whereas it actuates taken decisions in the ap-
ply phase. In the share phase, a cognitive entity com-
municates instructions, i.e., information, knowledge
or commands, as needed. In the remember phase, it
remembers the learnt or consolidated knowledge and
provides both ways access to it. All the above phases
possess interfaces to the outside of the cognitive en-
tity. The latter, remember, may not necessarily have
such, but in general it can. For example, this is needed
when access to information is distributed as in clouds,
whereas a working memory is likely to be local to the
entity. The four outer phases above represent the in-
terfaces towards the entity’s outside world, the cogni-
Multi-robot Systems, Machine-Machine and Human-Machine Interaction, and Their Modelling
121

Table 1: The cognitive and metacognitive phases (left and right half of the table respectively) in the four categories (rows).
Revised from (Celentano, 2014).
cognitive frontier metacognitive hub
perceive acquiring information processing information analyse
remember storing/fetching knowledge building knowledge learn
share sharing instructions preparing instructions synthesise
apply actuating decisions generating decisions decide
tive frontier. Those interfaces are used as inputs and
outputs for commands, ports for communication and
data storage and retrieval.
While the outer phases of each category exchange
information with their corresponding inner phases
only, the four inner phases exchange their own inputs
and outputs among themselves, so they form what we
call the metacognitive hub. In the analyse phase, in-
puts are filtered, converted and analysed. Conversely,
in synthesise, instructions are selected and adapted
for the specific sharing use. So, in the learn phase,
the cognitive entity processes commands (actions are
not directly observable at metacognitive hub, but de-
cisions are) and information (including the feedback
from actions, when available), to build knowledge.
Learning may also be exploited for pre-processing in-
coming stimuli or process instructions for a specific
sharing scope. All the above is exploited to take de-
cisions (including prioritisation and planning of ac-
tions) in the decide phase.
The generic model described here incorporates the
functionalities of a cognitive entity. Clearly, in a given
cognitive entity, only a subset of those may be present
(or, equivalently, be active).
6 INTERACTING COGNITIVE
ROBOTS
This section illustrates how the model presented in
Sect. 5 is combined into a generic scenario incorpo-
rating those is Sect. 4.
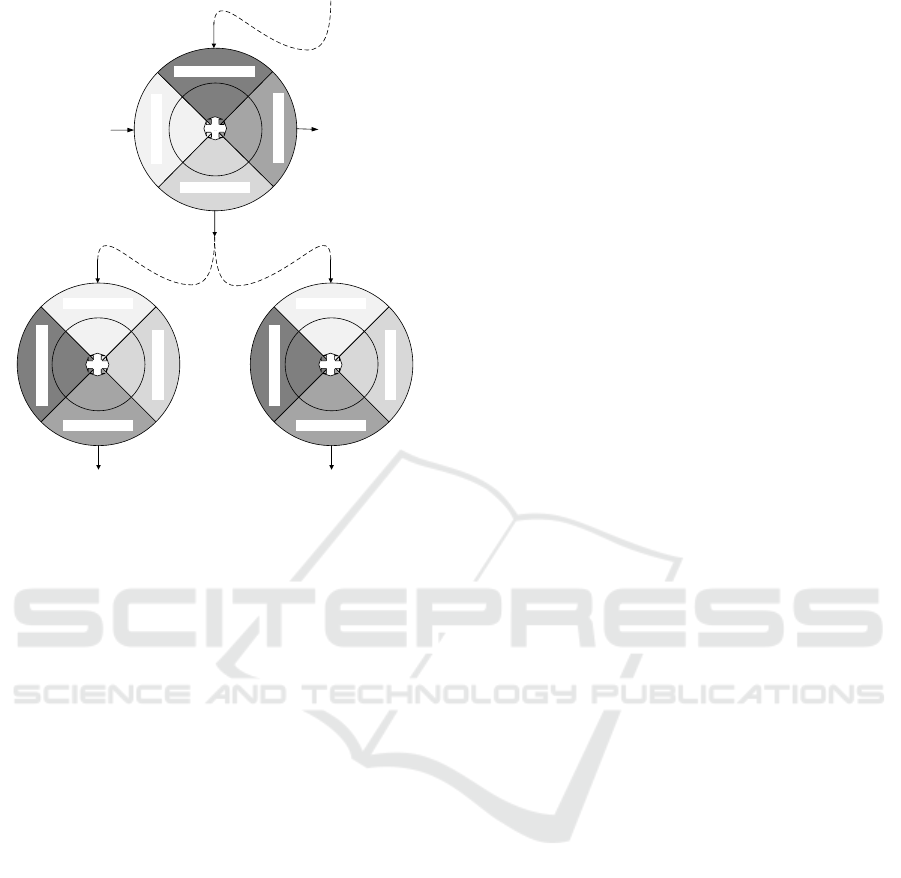
Fig. 4 depicts a scenario in which the interaction
follows an act-and-observe (Sect. 4) model. The robot
at the bottom senses the actuations of the robots at
the top of the figure. In this example, the first robot
may consolidate the related knowledge for (possibly
shared) further use.
Fig. 5 depicts a scenario in which the interaction
follows a share-and-act (Sect. 4) model. The robots
at the bottom acquire the instructions shared by the
robot at the top of the figure. Here, the latter robot
gathers before that additional information from the
consolidated knowledge.
y
u
v
OBSERVATION
OPERATION
INTERWORKING
CONSOLID ATION
y
u
v
OBSERVATION
OPERATION
INTERWORKING
CONSOLIDATION
y
u
v
OBSERVATION
OPERATION
INTERWORKING
CONSOLIDATION
z
Figure 4: A robot (bottom) sensing actuations of other
robots (top).
7 EVALUATION
Some related models have been mentioned in Sect. 2.
A thorough collation of the proposed model with re-
lated ones is given in (Celentano, 2014) and it is not
repeated here, but the key points are summarised in
the following.
Cognitive entity models can be assigned to dif-
ferent classes, depending on the relation among their
cognitive functions or phases (Celentano, 2014):
A. strictly cycle-based models (phases are visited
according to a pre-defined sequence) (Shewhart,
1939; Polya, 1957; Nilsson, 1984; Dobson et al.,
2006);
B. nested loops or parallel loops (Bryant, 2004);
C. cycle-based models with a shared phase (all
phases except one are visited according to a pre-
defined sequence, but they are connected to a
shared phase): (Kephart and Chess, 2003; Albus,
1991);
ICAART 2016 - 8th International Conference on Agents and Artificial Intelligence
122
y
vu
x
OPERATION
OBSERVATION
INTERWORKING
CONSOLIDATION
y
u
v
OBSERV AT ION
OPER ATION
INTERWORKING
CONSOLIDATION
y
u
v
OBSERV AT ION
OPER ATION
INTERWORKING
CONSOLIDATION
z
Figure 5: Robots (bottom) acquiring the instructions shared
by another robot (top).
D. branched cycles with a shared phase (a cycle is
somehow defined but short-cuts can be taken)
(Mitola, 2000);
E. purely phase-based models (phases are visited
with a pattern depending on a specific instantia-
tion or condition) (Anderson et al., 2004; Langley
et al., 1987; Kieras and Meyer, 1997; Artz and
Armour-Thomas, 1992; Celentano, 2014).
Models with a pre-defined visiting sequence (A, B,
C) are less flexible in their applicability over a wider
range of cases, which is conversely better for models
allowing more free dynamics (D, E). The proposed
model belongs to the latter class E.
Looking into the peculiarities of the above phases,
the cognitive functions in an intelligent entity can be
categorised as (Celentano, 2014):
1. collecting the inputs;
2. evaluating the inputs;
3. interworking (sharing instructions);
4. decision-making (including planning);
5. implementing the decisions;
6. verifying and generalising the lessons learnt.
As noted earlier, one notable novelty of the proposed
model is the explicit presence of the phases collec-
tively labelled above with 3. The explicit presence in
the model of those functions is important since they
are related to the specification of the (natural) inter-
faces involved in social interaction.
The importance of social interaction has been dis-
cussed in the above examples (Sect. 4 and 6).
8 DISCUSSION
Already in the case of an isolated intelligent entity,
self-awareness is crucial for a more conscious exe-
cution of tasks. In the case of flocks or swarms, self-
awareness improves the behaviour of the entire group.
In fact, in those cases it is important to discriminate
what I am doing from what the others are doing, even
if the final outcome (e.g., relative positions) may look
similar. Self-awareness is a pre-requisite for a more
effective self-organisation. Self-awareness may ex-
ploit explicit and/or implicit interaction among enti-
ties.
The model presented in the previous Sect. 5 spec-
ifies cognitive phases belonging to interacting cog-
nitive entities, together with the interfaces related to
those cognitive functions. Those functions may be re-
alised by separate and integrated element, therefore
it makes sense to bring these specifications to estab-
lished or standardised frameworks, such as ROS or
SISO.
The cognitive phases of the present model can be
realised as concurrent processes similarly as in the
ROS architecture. In particular, the share phase of the
model presented in this article is used to communicate
instructions before the apply and sometimes even be-
fore the decide phase).
Instructions in the model of Sect. 5 correspond to
orders, reports and requests in BML. Due to its prop-
erties of unambiguity and applicability to interna-
tional environments, BML is a possible candidate for
robotic applications also in other more general cases
such as civilian scenarios, including industry environ-
ments. Extensions of it might be needed, though, also
to let it cope with such diverse situations.
9 CONCLUSION
This article discussed some fundamental issues con-
cerning multi-entity intelligent systems. Particular at-
tention has been given to the observation and related
decision-making for system control and examples for
multi-robot systems have been discussed. The ma-
jor means for the needed interaction of robots are the
sensing of actuation of other robots, and the coordi-
nation based on sharing and acquisition of relevant
instructions. The latter implies the possibility of in-
teraction beyond the simplest actuator-sensor acquisi-
tion of information.
Multi-robot Systems, Machine-Machine and Human-Machine Interaction, and Their Modelling
123

A cognitive mobile robot should therefore explic-
itly include such interworking capabilities, which are
not found in present models for artificial entities. The
model presented in this article fills this gap. Illus-
trative examples show the role the cognitive phases
of this model have in the above two classes of multi-
robot social interaction. Specifically, this article dis-
cussed with the aid of examples how self-awareness
can be exploited for self-organisation by detecting
and managing behavioural anomalies, i.e., abnormal-
ities in group dynamics.
The cognitive phases of the present model are in-
spired by both artificial and natural cognitive enti-
ties. This makes such a holistic model suitable for use
not only for machine-machine, but also for human-
machine interaction.
Interoperability across diverse operational do-
mains and system design reuse across different appli-
cation domains are both timely topics, and for that
robust specifications of functionalities and interfaces
to suit the above goals are needed. This article aims
at this target.
It is evident that explicitly considering social in-
teraction in the model for an intelligent entity brings
advantages to flexible design and specifications. A
comparative evaluation of the proposed model has
been given here. The evaluation of the concepts dis-
cussed in this article by implementation into mobile
robots is part of our future work in this area.
ACKNOWLEDGEMENTS
The authors would like to thank Infotech Oulu for the
financial support.
REFERENCES
Albus, J. (1991). Outline for a theory of intelligence. IEEE
Trans. Syst. Man Cybernet., 21(3):473–509.
Anderson, J., Bothell, D., Byrne, M., Douglass, S., Lebiere,
C., and Qin, Y. (2004). An integrated theory of the
mind. Psychol. Rev., 111(4):1036–1060.
Artz, A. and Armour-Thomas, E. (1992). Development of a
cognitive-metacognitive framework for protocol anal-
ysis of mathematical problem solving in small groups.
Cognition and Instruction, 9(2):137–175.
Brooks, R. (1986). A robust layered control system for a
mobile robot. IEEE J. Robot. Autom., RA-2(1):14–23.
Bryant, D. (2004). Modernizing our cognitive model. In
Command Control Res. Technol. Symp., pages 1–14,
San Diego, CA, US.
Celentano, U. (2014). Dependable cognitive wireless net-
working: Modelling and design. Number 488. Acta
Universitatis Ouluensis Series C: Technica.
Celentano, U. and R
¨
oning, J. (ms). Modelling interactive
cognitive entities. Manuscript.
Dobson, S., Denazis, S., Fern
´
andez, A., Gaiti, D., Gelenbe,
E., Massacci, F., Nixon, P., Saffre, F., Schmidt, N., and
Zambonelli, F. (2006). A survey of autonomic com-
munications. ACM Trans. Autonomous Adapt. Syst.,
1(2):223–259.
Dupourqu
´
e, V. (1984). A robot operating system. In IEEE
Int. Conf. Robot. Autom., volume 1, Atlanta, GA, US.
Kephart, J. and Chess, D. (2003). The vision of autonomic
computing. IEEE Comput., 36(1):41–50.
Kerr, J. and Nickels, K. (2012). Robot operating systems:
Bridging the gap between human and robot. In South-
eastern Symp. Syst. Theory (SSST), pages 99–104,
Jacksonville, FL, US.
Kieras, D. and Meyer, D. (1997). An overview of the EPIC
architecture for cognition and performance with appli-
cation to human-computer interaction. Hum.-Comput.
Interact., 12:391–438.
La, H., Lim, R., and Sheng, W. (2015). Multirobot coop-
erative learning for predator avoidance. IEEE Trans.
Control Syst. Technol., 23(1):52–63.
Langley, P., Laird, J., and Rogers, S. (2009). Cognitive ar-
chitectures: Research issues and challenges. Cogn.
Sys. Res., (10):141–160.
Langley, P., Newell, A., and Rosenbloom, P. (1987). Soar:
An architecture for general intelligence. Artif. Intell.,
33(1):1–64.
M
¨
aenp
¨
a
¨
a, T., Tikanm
¨
aki, A., Riekki, J., and R
¨
oning, J.
(2004). A distributed architecture for executing com-
plex tasks with multiple robots. In IEEE Int. Conf.
Robot. Autom. (ICRA), pages 3449–3455, New Or-
leans, LA, US.
Mitola, J. (2000). Cognitive radio: An integrated agent
architecture for software defined radio. Kungliga
Tekniska H
¨
ogskola (KTH), Stockholm.
Nilsson, N., editor (1984). Shakey the robot. Number Tech-
nical Note 323. Artificial Intelligence Center, SRI In-
ternational, Menlo Park, CA.
Peschl, M., R
¨
oning, J., and Link, N. (2012). Human integra-
tion in task-driven flexible manufacturing systems. In
Katalinic, B., editor, Ann. DAAAM 2012 & Proc. 23rd
Int. DAAAM Symp., pages 85–88, Zadar, Croatia.
Polya, G. (1957). How to solve it: A new aspect of math-
ematical method. Doubleday Anchor Books, Garden
City, NY, 2nd edition.
Quigley, M., Gerkey, B., Conley, K., Faust, J., Foote, T.,
Leibs, J., Berger, E., Wheeler, R., and Ng, A. (2009).
ROS: an open-source robot operating system. In ICRA
Workshop Open Source Software, Kobe, Japan.
Rein, K., Schade, U., and Hieb, M. (2009). Battle man-
agement language (BML) as an enabler. In IEEE Int.
Conf. Commun. (ICC), Dresden, Germany.
Remmersmann, T., Br
¨
uggemann, B., and Miłosław, F.
(2010). Robots to the ground. In Mil. Commun. In-
form. Systems Conf. (MCC), pages 61–68, Warsaw,
Poland.
ICAART 2016 - 8th International Conference on Agents and Artificial Intelligence
124

Shewhart, W. (1939). Statistical method from the viewpoint
of quality control. Graduate School of the Department
of Agriculture, Washington, DC. Reprint by Dover
Publications, Mineola, NY, 1986.
Thomas, R., DaSilva, L. A., and MacKenzie, A. (2005).
Cognitive networks. In IEEE Int. Symp. New Fron-
tiers Dynam. Spectrum Access Netw. (DySPAN), pages
352–360, Baltimore, MD, US.
Multi-robot Systems, Machine-Machine and Human-Machine Interaction, and Their Modelling
125
