
Evaluation of Range-based Methods for Localization in Grain Storages
Jakob Pilegaard Juul
1,2
, Ole Green
2
and Rune Hylsberg Jacobsen
1
1
Department of Engineering, Aarhus University, Aarhus, Denmark
2
Kongskilde Strategic Development, Kongskilde Industries A/S, Sorø, Denmark
Keywords:
Wireless Sensor Networks, WSN, Localization, Biomass.
Abstract:
Monitoring biomass storages by using wireless sensor networks with localization capabilities can help prevent
economic losses during storage, help to improve the grain quality and lower costs during drying. In this article,
the received signal strength was used to perform localization of wireless sensor nodes embedded in a grain
storage. A path loss model that takes into account the temperature and moisture content of the grain at each
sensor node was used for estimating distance based on received signal strength. The average error of the
position estimates was 6.3 m. Tests using near-field electromagnetic ranging were performed to evaluate the
performance of the method. It was found that the experimental setup worked best between 2 - 7 m where the
average error was 4.9% of the actual distance.
1 INTRODUCTION
Many wireless sensor network (WSN) applications
can benefit from nodes knowing their location. This
could be for use in identification and correlation
of gathered data, node addressing, geographic rout-
ing, object tracking, etc. (Boukerche et al., 2007).
Biomass is biologically active or potentially active
given the right conditions. When kept in a storage,
this biological activity is unwanted and may result in
a degradation of the quality of biomass. The com-
bination of continuous monitoring and localization
provides the information needed to limit the biomass
degradation. In the case of grains and seeds (grain
from here on), storage is usually preceded by a drying
process to lower the moisture content of the grain to
a level that ensures minimal biological activity while
still providing a good quality crop for the intended
use. The main expenses of the drying process are the
cost of fuel and electrical power for heaters and fans
(Mühlbauer, 1986). By using a WSN with localiza-
tion capability, it enables the user to see the mois-
ture content from different sections of the grain and
only dry the sections that have not reached the de-
sired moisture content. This lowers the total amount
of fuel and electricity used as the system only dries the
sections in need and not the entire storage throughout
the whole process. This sectioning of the storage dur-
ing the drying process also helps to avoid overdrying.
Overdrying happens when some sections of a storage
have reached the desired moisture content while other
sections have not. The opposite may also happen,
where the system stops before the moisture content
of all the grain in the storage has been lowered to a
stable level. This can result in losses during the stor-
age period due to high biological activity.
This paper presents the experimental results of us-
ing radio signal strength (RSS) localization for posi-
tioning of wireless sensor nodes embedded in a grain
storage. It also examines the potential of using a
near-field electromagnetic ranging (NFER) technique
in addition to RSS for localization of wireless nodes.
Section 2 describes related work. Section 3 describes
the theory behind the RSS localization used in this
study and the theory behind NFER. Section 4 de-
scribes the experiments and results. Section 5 dis-
cusses the results of the experiments and Section 6
concludes and outlines future work.
2 LOCALIZATION METHODS
Localization in WSNs can be carried out by using
various methods. However, many localization algo-
rithms implement the same basic techniques. Those
algorithms are based on finding the distance between
nodes, deriving a position based on those distance
measurements and lastly refine the position estimate
based on the distance to other nodes (Langendoen and
Reijers, 2003). To localize a node in a WSN using this
technique the literature divides different approaches
Juul, J., Green, O. and Jacobsen, R.
Evaluation of Range-based Methods for Localization in Grain Storages.
DOI: 10.5220/0005669601050112
In Proceedings of the 5th International Confererence on Sensor Networks (SENSORNETS 2016), pages 105-112
ISBN: 978-989-758-169-4
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
105

into range-based and range-free methods, see Fig. 1.
Range-based techniques use distance estimates or an-
gle estimates in location calculations while range-free
techniques depend only on the contents of received
messages (Hu and Evans, 2004).
Localization methods
Range-based
Range-free
RSS TOA AOATDOA
Proximity
Hop
count
NFER
Figure 1: Overview of localization methods.
Proximity methods are among the range-free lo-
calization techniques that provide a coarse localiza-
tion of a node. These methods do not measure dis-
tance directly, rather they rely on the number of node-
hops required to reach a destination node (Kumar and
Lobiyal, 2013) or on the connectivity by determining
which fixed-position anchors are within range. As this
approach requires no special equipment, the use cases
are many, especially in WSNs with many nodes. It has
been demonstrated that by assuming a sensor node
was located on the centroid between anchors in range,
it could be located with an error of less than 30%
of the distance between the beacons (Bulusu et al.,
2000). However, the presence of multipathing, noisy
environments, dead spots, and fading, etc. is likely to
reduce the accuracy of the localization.
RSS has been used both as a range-free and a
range-based method. An advantage of RSS-based
methods is that almost any radio chip supports RSS
measurements. It is possible to translate RSS to range
using a path loss model. The model should be cho-
sen with care as it is very sensitive to the environ-
ment where the node is deployed. It has been in-
vestigated how well RSS performs in real situations
(Whitehouse et al., 2007). Several parameters such
as attenuation coefficient and effective range of com-
munication were characterized by using a large num-
ber of wireless nodes in different settings. Comparing
the locations estimated from RSS measurements of 49
nodes to GPS data, standard error in location of 4 m
was achieved.
Time-of-arrival (TOA) has also been used for lo-
calization (Gezici and Poor, 2009). A well-known ex-
ample of a one-way TOA system is the Global Posi-
tioning System (GPS). The one-way TOA approach
requires stringent clock synchronization between the
nodes and low-jitter clocks on the nodes (Gezici and
Poor, 2009). Two-way TOA is also possible. In this
case, no clock synchronization is required between
nodes. Instead, a delay-calibration can be performed
where the delay between reception and response to a
message is recorded. A study has shown that TOA
localization techniques can estimate the location of
a node with approximately 15 cm accuracy (Sathyan
et al., 2011). Higher accuracy is possible by using a
more bandwidth.
Time-difference-of-arrival (TDOA) is a variation of
TOA where measurements of the time difference be-
tween the arrival of two or more signals facilitate lo-
calization. The signals can be from a single transmit-
ter using signals with different propagation speeds,
e.g. sound and radio signals, or it can be of the same
type of signals transmitted from/received at multiple
locations. An example of the first case is small units
with ultrasonic transducers and radios as in Cricket
localization-support system (Priyantha et al., 2000).
The main drawbacks of such a system are the limited
propagation range of the ultrasound wave and the po-
tential interference problems with other ultrasounds
sources in outdoor environments (Bulusu et al., 2000).
TDOA does not require the same stringent synchro-
nization as TOA between transmitter and receiver but
clock skew and drift has to be taken into account
(Xiong et al., 2015).
Angle-of-arrival (AOA) can also be used to determine
location. Traditionally this is done using phase inter-
ferometry techniques and large antenna arrays. AOA
has demonstrated good performance in high signal-to-
noise ratio (SNR) conditions but require large anten-
nas and fail in the presence of multipathing and co-
channel interference (Rappaport et al., 1996). A dif-
ferent approach more suited for WSN is to use smart
antennas for AOA estimation. These are smaller than
conventional antenna arrays and can be used with
high-resolution AOA estimation algorithms such as
MUSIC or ESPRIT (AlHajri et al., 2015). Apply-
ing the AOA approach to WSNs means that the nodes
and anchors with AOA capabilities require special
equipment, usually in the form of special antennas
(Nasipuri and Li, 2002).
NFER relies on measuring the difference in phase be-
tween the electric and magnetic components in the
near field of a signal. This difference can be related
to the distance to the transmitter. Shantz et al. has
successfully used NFER for localization and reported
average position errors of 30 cm. It was noted that
the error had little correlation with range but that de-
creasing SNR could severely affect the phase accu-
racy (Schantz, 2005).
SENSORNETS 2016 - 5th International Conference on Sensor Networks
106

(a) (b)
Figure 2: The permittivity of ’Nebred’ hard red wheat at 24
◦
C and the indicated moisture content. The density of the wheat
was 768 kg/m
3
at 13% moisture content. (a) shows the relative permittivity over a range of moisture content, and (b) shows
the loss factor. Graph recreated from (Nelson, 1965).
3 RSS AND NFER
LOCALIZATION THEORY
The theory for RSS localization as well as the theory
behind NFER is presented in this section.
3.1 Received Signal Strength
To use RSS in localization a model that relates RSS
to distance has to be found. The model used in this
paper to estimate the distance between a transmitter
and a receiver is the log-normal path loss model as
shown in Eq. (1) (Rappaport, 2002).
PL(d)[dBm] = PL(d
0
)[dBm] − 10 · n · log(
d
d
0
) + X
σ
(1)
Here PL(d) is the average received power at distance
d, PL(d
0
) is the average measured received power at
the reference distance d
0
. X
σ
is a zero-mean Gaussian
random variable with standard deviation σ which ac-
counts for the effect of shadowing (Rappaport, 2002).
n is the path loss exponent. In free space the exponent
is equal to two. In the case where the sensor nodes
are embedded in biomass the exponent is higher. As
can be seen in Fig. 2 the complex relative permittiv-
ity of the grain is affected by the temperature, mois-
ture content, and frequency of the signal. This means
that all these three parameters will affect the path loss
of the transmitted signal. The frequency-dependent
complex relative permittivity is defined as Eq. (2).
ε
r
(ω) = ε
0
r
(ω) + jε
00
r
(ω) (2)
Where ω is the angular frequency, ε
0
r
(ω) relates to the
electrical energy that can be stored in the medium.
ε
00
r
(ω) is the imaginary part of the complex relative
permittivity and relates to the dissipation of energy in
a material. To account for the moisture content and
temperature of the grain, n is defined as:
n = a + b · M
H
2
O
+ c · T (3)
In Eq. (3), M
H
2
O
is the moisture content wet-basis of
the grain. The moisture content is found by using
the modified Henderson equation (ASAE Standards,
1999). T is the temperature in degrees Celcius, a, b
and c are the fitting parameters. a, b and c can be
found by using linear regression given measured RSS
values at known distances.
Once the distance has been estimated these are to
be used for 3-dimensional position estimates by using
trilateration. In this case, it is the 3-dimensional po-
sition that is of interest and the trilateration problem
resolves into finding the intersections of three spheres.
As this gives none, one, or two solutions, knowledge
of the placement of the anchors and sensor nodes can
be used to eliminate solutions in the cases where more
than one is found.
3.2 Near-field Electromagnetic Ranging
The near field extends to about half a wavelength λ
from an electrically small antenna (Schantz, 2005)
and is governed by other phenomena than those of
the far-field region. In the far-field region the phase
difference between the electric and magnetic compo-
nents is constant. In contrast, in the near-field region
of an antenna with dimensions smaller than 1/10 of
the wavelength, also called an electrically small an-
tenna (Miron, 2006), the phase of the two components
change with distance. If each of these components are
measured separately and compared to each other, this
can be used as a measurement of distance. The re-
lation between distance d and phase difference ∆φ is
Evaluation of Range-based Methods for Localization in Grain Storages
107

given by Eq. (4).
d =
λ
2π
3
p
cot∆φ (4)
Here d is the distance from between transmitter and
receiver. λ is the wavelength of the signal. ∆φ is
the difference in phase between the electric and mag-
netic component of the radio wave. In practice, the
effect can be used out to around 0.25 λ depending
on the transmitted power (Kim et al., 2006). Fig. 3
shows how the phase difference changes as a function
of the distance to between transmitter and receiver in
fractions of the signal wavelength. NFER has sev-
Figure 3: Plot showing the difference in phase as a result
of distance from the transmitter. The interval between the
vertical lines indicates the best area of operation.
eral interesting characteristics. The measurement is
one-way, meaning that only the receiver needs to do
the measurement, and it is not required to communi-
cate with the transmitter. The accuracy of the mea-
surements is not affected by the available bandwidth,
making the method suitable for situations where high
frequency signals are difficult to use as in the case of
biomass. For the phenomenon to be of use at ranges
from tens to hundreds of meters frequencies between
500 kHz (λ = 600 m) to 7 MHz (λ = 42.8 m) are ap-
propriate. Because low frequencies tend to be more
resistant to multipath effects and have better penetra-
tion depth, this is another advantage of the approach.
The exact choice of frequency should be done with
care. The best area of operation is between 0.08λ and
0.25λ (Kim et al., 2006).
4 EXPERIMENTAL SETUP AND
RESULTS
To examine the use of RSS and NFER for localiza-
tion in biomass two experiments were performed. The
first experiment examined the performance of a sys-
Figure 4: The placement of sensor nodes and base stations
during the experiment. The spheres are sensors and the
boxes are base stations.
tem based solely on RSS measurements for localiza-
tion. The second experiment examined the ranging
precision of a NFER setup.
4.1 RSS Measurements
The goal of the experiment was to find the 3-
dimensional position estimates of a number of nodes
deployed at known positions in a grain storage. This
experiment was carried out from August 2011 to
November 2011.
In the experiment 30 nodes and 3 base stations
were deployed in known positions in a wheat stor-
age as shown in Fig. 4. The dimensions of the wheat
storage was 9.6m · 15.8m· 4.0m The nodes used in the
experiment consist of a MSP430 microcontroller with
55 kB onboard flash and 5 kB of RAM, 1 MB exter-
nal flash memory, a Semtech SX1231 radio, a 8.5 Ah
lithium C-cell battery and a SHT11 temperature and
relative humidity sensor. The nodes run TinyOS
(Levis et al., 2005) and communicate at 433 MHz.
For a more in-depth description of the system, please
refer to (Juul et al., 2015).
The nodes measured and reported temperature and
humidity every 5 minutes. During each transmission
the RSS of the signal was recorded. The RSS mea-
surements were averaged over 30 minute intervals and
were subsequently used to try and estimate the dis-
tance from each base station to each individual sen-
sor. This estimate was used to make a 3D-position
estimate that was compared to the recorded position
of the nodes. During the RSS-experiment data was re-
ceived from 18 out of 30 nodes. 6 of these 18 dropped
out before the end of the experiment but did deliver
data for a limited period. The cause of the lack of
reporting nodes was drainage of power and transmis-
sion loss. The missing nodes can be seen as gray dots
in Fig. 4.
The temperature and calculated moisture content
of the remaining nodes can be seen in Fig. 5 and 6.
The graphs show the different conditions present in
the storage and how it changes over time. The value
SENSORNETS 2016 - 5th International Conference on Sensor Networks
108

Figure 5: The temperature measured by the nodes.
Figure 6: The moisture content wet-basis of the grain.
Calculated using the modified Henderson equation (ASAE
Standards, 1999).
of the fitting parameters in Eq. (3) can be found by
using the measured RSS values for each node to each
base station and doing least squares linear regression.
The values found were a = 7.028, b = -0.082, and c
= -0.016. A comparison of the actual and estimated
distances can be seen in Fig. 7. The average error of
the estimated distance between a base station and a
node is 33.54% of the actual distance between them.
The average error in meter for all measurements is
2.67 m.
Using trilateration as outlined earlier to estimate
positions from the range estimates gives an average
positioning error of 6.3 m.
4.2 Near-field Phase Measurements
In an effort to find a distance-based measurement to
supplement RSS, work was done to study the feasi-
bility of the NFER method. The purpose of the ex-
periment was to measure the difference in phase be-
tween the electric and magnetic component of the ra-
Figure 7: The estimated distance between the individual
nodes and the base stations compared to the actual distance.
7.03MHz
bandpass
filter
7.03MHz
bandpass
filter
USRP GNU Radio
Low-noise
amplifier
Low-noise
amplifier
Whip antenna
Loop antenna
Whip antenna
7.03MHz CW radio
transmitter
Figure 8: Diagram of the experimental setup.
dio wave at ranges of 1 to 10 m. To get the biggest
change in phase at the desired range a frequency of
7.03 MHz (λ = 42.6 m) was used. Three electrically
small antennas were constructed for the experiment.
Two whip antennas and a box loop antenna. The
whip antennas were matched to the feedline by an air
core inductor and the loop by an adjustable capacitor
with a range of 15 - 385 pF. A small battery powered
7.03 MHz Continuous Wave (CW) radio connected to
one of the whip antennas was used as the transmitter.
The receiver consisted of a N210 USRP from Ettus
that had a whip and loop antenna connected to the two
inputs of the device. Between antennas and the USRP
was placed a ZFL-1000LN+ low-noise amplifier fol-
lowed by a Bessel bandpass filter with a center fre-
quency of 7 MHz and a passband of 500 kHz. Fig. 8
shows the experimental setup. The experiment took
place on a field with line of sight between transmitter
and receiver. Measurements were taken at 1 to 10 m
in 1 m intervals. The transmitter was the mobile unit
while the receiver was in a fixed position for all mea-
surements. By using GNU Radio version 3.7.6, the
received signal was filtered and stored in a file for of-
fline processing. Each antenna added a constant phase
shift to the measurements as they were not tuned ex-
actly to resonance due to the limitations of the tuning
circuit. The phase shift of an antenna was subtracted
from the measurements made by that antenna and the
Evaluation of Range-based Methods for Localization in Grain Storages
109
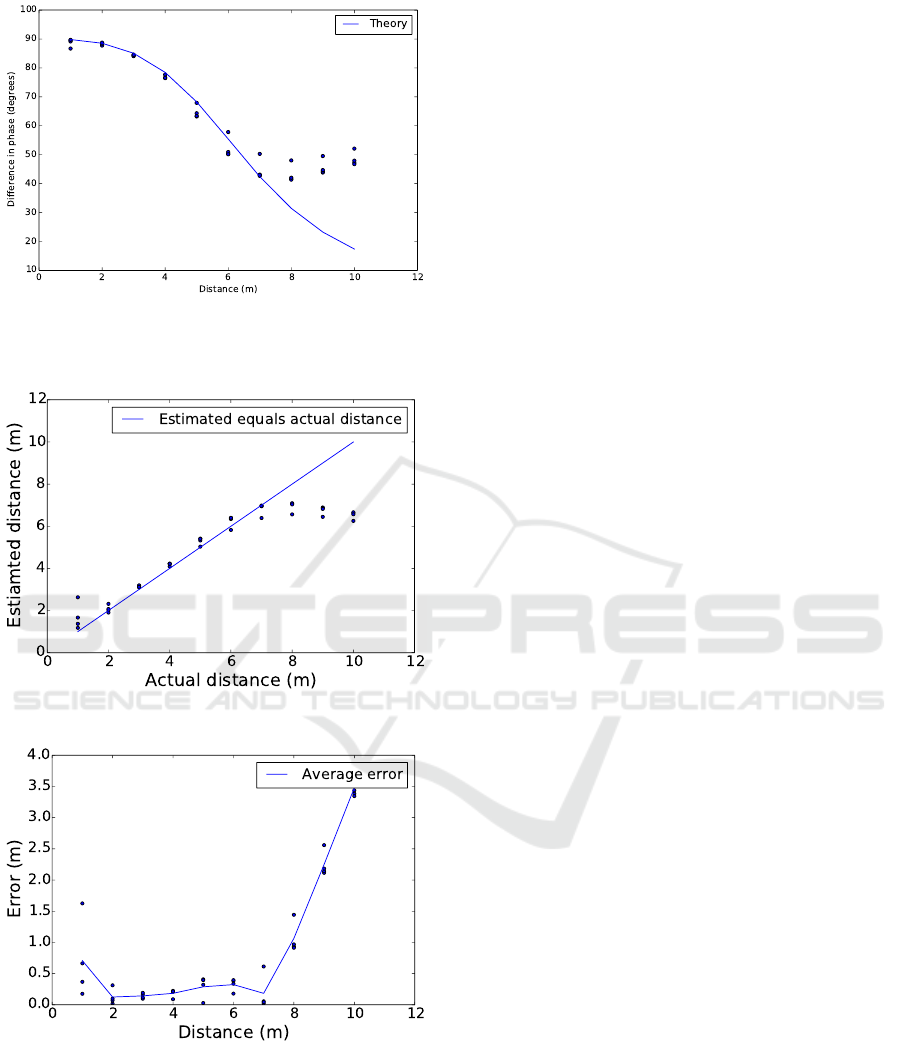
Figure 9: Theoretical and measured phase difference be-
tween magnetic and electric component of a 7.03 MHz sig-
nal in the near-field.
Figure 10: The range estimated from the phase difference.
Figure 11: The estimation error at a given distance.
phase difference between the two signals was calcu-
lated. Fig. 9 shows the calculated phase difference,
Fig. 10 shows the range estimates and Fig. 11 shows
the estimation error at a given range.
In Fig. 9 the measured phase differences are over-
laid on the theoretical phase difference at a given
range. Up to approximately 7 m the curve of the the-
ory and the curves of the measurements series fit to-
gether well. Above 7 m the measurements and theory
increasingly diverge. This can also be seen in the dis-
tance estimates in Fig. 10. From 2 m to 7 m the mea-
surements have an average error of 21 cm, and the av-
erage error at a given distance is 4.9% of the distance,
see in Fig. 11. At 1 m the average error is 71 cm.
This is much larger than the immediately following
measurements. At this range the antenna dimensions
become a significant proportion of the range and the
theoretical prediction breaks down (Schantz, 2005).
Looking at Fig. 11 also show that the error increases
with range. This is because of the decreasing SNR
as the distance between transmitter and receiver in-
crease. The average SNR at 2 m was 57 dB and the
SNR at 7 m was 28 dB.
It should be noted that the NFER measurements
were done in air. When this method is applied in
biomass, the increased RF absorption will lower the
SNR at all ranges. The heterogeneity of the material
would also contribute to measurement errors.
5 DISCUSSION
Considering the dimensions of the grain storage, a
positioning error of 6.3 m for the RSS trilateration
is large. Looking at the actual position estimates
roughly 50% of the estimates are placed outside the
storage due to estimation errors. In this experiment,
only three base stations were used. Adding more
bases in known positions would likely improve the es-
timates (Alippi and Vanini, 2006). Improving the path
loss model used could also reduce error. The current
model includes the temperature and moisture content
at the node, but these parameters change as the signal
travels through the grain, see Fig. 6. If this hetero-
geneity is included in the path loss model improved
location estimates are expected. The same holds true
if the fact that signals from different nodes travel dif-
ferent distances through the grain is included in the
model.
At ranges from 2 to 7 m the current NFER-setup
provides a range estimate with an average error of
4.9% of the actual distance and shows to be primarily
limited by the SNR. This indicates that if sufficient
signal is present measuring the near field phase has
the potential of providing accurate and precise dis-
tance estimates. On the other hand making electri-
cally small and efficient antennas is not trivial and is
the biggest difficulty in trying to increase range and
lower the error.
Table 1 compares the NFER experiment carried
out here with experiments carried out with other rang-
SENSORNETS 2016 - 5th International Conference on Sensor Networks
110

Table 1: Comparing different ranging methods.
Name of method Range Accuracy Suitability for biomass
NFER 7 m 20 cm Partly
NFER (Schantz, 2005) 70 m 30 cm Partly
RSS (Whitehouse et al., 2007) 50 m 4 m Partly
TOA (Sathyan et al., 2011) 30 m 15 cm No
TDOA, ultrasound (Balakrishnan et al., 2003) 10 m 1 cm No
AOA (Amundson et al., 2010) - 3
◦
No
ing methods. The range NFER operates in is deter-
mined by the frequency of the signal used. In the cur-
rent experiment the range was limited to below 10 m
while Schantz et. al. (Schantz, 2005) used a fre-
quency of 1.295 MHz to achieve a longer range. The
low frequencies used in NFER gives a higher pene-
tration depth in materials. However, while NFER al-
ways requires an electrically small antenna, the lim-
ited space in the sensor nodes puts even shaper con-
straints on the size. Because of this it is only partly
suitable for use in biomass.
As RSS-measurements can be made on any re-
ceived signal, the approach is possible to use in
biomass as long as the network can communicate. It
should be noted that modeling the path loss is diffi-
cult even in good condition and the biomass makes
this even more difficult to make accurate estimations.
However, due to the high availability of the measure-
ment even in this environment it is deemed partly suit-
able for use in biomass.
TOA require high bandwidth to provide a good
accuracy (Thorbjornsen et al., 2010). The high-
frequency signals needed for high bandwidth are
severely attenuated by obstacles. As the nodes are to
be embedded in biomass, TOA is not a suitable local-
ization approach.
As shown in Table 1, TDOA can have a very low
error. However, in the case of ultrasound TDOA, the
signal has a short range in air and it would be further
attenuated in biomass. Having a radio signal recorded
by multiple receivers suffer from the same bandwidth
limitations as TOA in biomass.
AOA is not suitable for use in biomass. The an-
tennas needed are too large and, while beamform-
ing has no size requirements, the heterogeneity of
the biomass would change the beam pattern unpre-
dictably, making it difficult to get accurate AOA mea-
surements.
Based on the measurements presented here, RSS
localization seems poorly suited as a stand-alone sys-
tem for estimating the position of wireless sensor
nodes in grain. The experiments with the NFER-
approach looks promising, but as measurements have
only been done in air further experiments to test the
performance in grain should be carried out. Com-
bining the two methods for localization in biomass
should be investigated. The use of data fusion tech-
niques such as weighted least squares and Kalman fil-
ters could improve position estimates compared to us-
ing only one of the methods.
6 CONCLUSIONS
This paper examines the use of RSS localization in a
grain storage and NFER as a ranging method. The
RSS localization had an average positioning error of
6.3 m. To minimize the error, it is suggested to use
more base stations at known positions and put more
effort into refining the path loss model used. Investi-
gations were made on using NFER for localization. A
first experiment tested NFER localization in air, and
the feasible distance of the setup was limited to dis-
tances between 2 and 7 m. These estimates had an
average error of 4.9% of the actual distance.
Future work includes improving the antenna and
RF circuit design to improve the SNR and then test
NFER in a grain storage. Furthermore, a system com-
bining RSS and NFER for localization should be im-
plemented and tested in a grain storage.
REFERENCES
AlHajri, M. I., Goian, A., Darweesh, M., AlMemari, R.,
Shubair, R. M., Weruaga, L., and Kulaib, A. R. (2015).
Hybrid RSS-DOA Technique for Enhanced WSN Lo-
calization in a Correlated Environment. In 2015 Inter-
national Conference on Information and Communica-
tion Technology Research (ICTRC), pages 238–241.
Alippi, C. and Vanini, G. (2006). A RSSI-based and Cal-
ibrated Centralized Localization Technique for Wire-
less Sensor Networks. In Proceedings - Fourth Annual
IEEE International Conference on Pervasive Comput-
ing and Communications Workshops, PerCom Work-
shops 2006, volume 2006, pages 301–305. IEEE.
Amundson, I., Sallai, J., Koutsoukos, X., and Ledeczi, A.
(2010). Radio interferometric angle of arrival esti-
mation. Lecture Notes in Computer Science, 5970
LNCS:1–16.
Evaluation of Range-based Methods for Localization in Grain Storages
111

ASAE Standards (1999). D245.5 Moisture Relationships of
Plant-based Agricultural Products. ASAE, St. Joseph.
Balakrishnan, H., Baliga, R., Curtis, D., Goraczko, M.,
Miu, A., Priyantha, N., Smith, A., Steele, K., Teller,
S., and Wang, K. (2003). Lessons from develop-
ing and deploying the cricket indoor location system.
Preprint.
Boukerche, A., Oliveira, H., Nakamura, E., and Loureiro,
A. (2007). Localization Systems for Wireless Sensor
Networks. Wireless Communications, IEEE, 14(6):6–
12.
Bulusu, N., Heidemann, J., and Estrin, D. (2000). GPS-
less Low-Cost Outdoor Localization for Very Small
Devices. IEEE Personal Communications, 7(5):28–
34.
Gezici, S. and Poor, H. V. (2009). Position Estimation via
Ultra-Wide-Band Signals. Proceedings of the IEEE,
97(2):386–403.
Hu, L. and Evans, D. (2004). Localization for Mobile Sen-
sor Networks. Proceedings of the 10th annual interna-
tional conference on Mobile computing and network-
ing MobiCom 04, pp(October):45–57.
Juul, J. P., Green, O., and Jacobsen, R. H. (2015). Deploy-
ment of Wireless Sensor Networks in Crop Storages.
Wireless Personal Communications, 81(4):1437–
1454.
Kim, C. W., Chint, F. P. S., and Garg, H. K. (2006). Mul-
tiple Frequencies for Accuracy Improvement in Near
Field Electromagnetic Ranging (NFER). In IEEE In-
ternational Symposium on Personal, Indoor and Mo-
bile Radio Communications, PIMRC, number 3, pages
1–5.
Kumar, S. and Lobiyal, D. K. (2013). An Advanced
DV-Hop Localization Algorithm for Wireless Sen-
sor Networks. Wireless Personal Communications,
71(2):1365–1385.
Langendoen, K. and Reijers, N. (2003). Distributed Local-
ization in Wireless Sensor Networks: A Quantitative
Comparison. Computer Networks, 43(4):499–518.
Levis, P., Madden, S., Polastre, J., Szewczyk, R., White-
house, K., Woo, A., Gay, D., Hill, J., Welsh, M.,
Brewer, E., and Culler, D. (2005). TinyOS: An Op-
erating System for Sensor Networks. In Weber, W.,
Rabaey, J. M., and Aarts, E., editors, Ambient Intel-
ligence, pages 115–148. Springer Berlin Heidelberg,
Berlin, Heidelberg.
Miron, D. B. (2006). Small Antenna Design. In Small An-
tenna Design, pages 56–58. Newnes, 1 edition.
Mühlbauer, W. (1986). Present Status of Solar Crop Drying.
Energy in Agriculture, 5(2):121–137.
Nasipuri, A. and Li, K. (2002). A Directionality Based
Location Discovery Scheme for Wireless Sensor Net-
works. In Proceedings of the 1st ACM international
workshop on Wireless sensor networks and applica-
tions - WSNA ’02, pages 105–111, New York, USA.
ACM Press.
Nelson, S. O. (1965). Dielectric Properties of Grain and
Seed in the 1 to 50-MC Range. Transactions of the
ASAE, 8(1):38–47.
Priyantha, N. B., Chakraborty, A., and Balakrishnan, H.
(2000). The Cricket Location-Support System. In
Proceedings of the 6th annual international confer-
ence on Mobile computing and networking - Mobi-
Com ’00, pages 32–43.
Rappaport, T., Reed, J., and Woerner, B. (1996). Position
Location Using Wireless Communications on High-
ways of the Future. IEEE Communications Magazine,
34(October):33–41.
Rappaport, T. S. (2002). Wireless Communications: Prin-
ciples and Practice. Prentice Hall, 2 edition.
Sathyan, T., Humphrey, D., and Hedley, M. (2011). WASP:
A System and Algorithms for Accurate Radio Local-
ization using low-cost Hardware. IEEE Transactions
on Systems, Man and Cybernetics Part C: Applica-
tions and Reviews, 41(2):211–222.
Schantz, H. (2005). Near Field Phase Behavior. IEEE An-
tennas and Propagation Society International Sympo-
sium, 3B(July):134–137.
Thorbjornsen, B., White, N. M., Brown, A. D., and Reeve,
J. S. (2010). Radio Frequency (RF) Time-of-Flight
Ranging for Wireless Sensor Networks. Measurement
Science and Technology, 21(3):035202.
Whitehouse, K., Karlof, C., and Culler, D. (2007). A Practi-
cal Evaluation of Radio Signal Strength for Ranging-
based Localization. Mobile Computing and Commu-
nications Review, 11(1):41–52.
Xiong, H., Chen, Z., Yang, B., and Ni, R. (2015). TDOA
Localization Algorithm with Compensation of Clock
Offset for Wireless Sensor Networks. China Commu-
nications, 12(10):193–201.
SENSORNETS 2016 - 5th International Conference on Sensor Networks
112
