
Visual Target Tracking in Clay Pigeon Shooting Sports:
Estimation of Flight Parameters and Throwing Range
Franz Andert
1
, Simon Freudenthal
2
and Stefan Levedag
3
1
Institute of Flight Systems, Unmanned Aircraft Dept., DLR (German Aerospace Center), Braunschweig, Germany
2
Technische Universität Braunschweig, Braunschweig, Germany
3
Head of the DLR-Institute of Flight Systems, Braunschweig, Germany
Keywords:
Image Processing, Stereo Triangulation, Sports Application, Rotating Disc, Flight Aerodynamics.
Abstract:
This paper presents a method to estimate the trajectory and the flight distance of thrown pigeon clays. The
basic principle is to measure the beginning of the flight with a camera system in order to forecast the further
flight down to the ground impact. The demand of such advanced measuring methods arises from sporting
clays competition regulations, where the launching machines have to be adjusted towards specific throwing
angles and ranges. The presented method uses a wide-baseline stereo camera system (32 m camera distance) to
measure the 3D clay disc positions, and the flight parameters are then identified by aerodynamic and kinematic
considerations. This allows to estimate the whole path and the throwing distance, especially without a need
to measure the ground impact itself. Applying this method to sporting clays facilities, the launching machines
can be adjusted easier and more precisely, being advantageous especially for competitions. Additionally, it
becomes possible to obtain the theoretical throwing distance on small sports areas bounded by nets or walls
where a ground impact is not measurable.
1 INTRODUCTION
Clay pigeon shooting summarizes several precision
sport disciplines where flying target discs have to be
hit with firearms. There are variations within the dis-
ciplines, e.g. different sizes of the clay target, the
position(s) from where to shoot, or the target flight
speed, range, or launching elevation angle. A com-
mon ground is that the flying targets are launched with
machines (traps). For competitions, the machines
have to be adjusted precisely so that flight distance,
direction and height specifications are achieved. The
parameter values differ between the disciplines but a
correct setting is usually a strict requirement.
This paper focuses on the setup of the Skeet disci-
pline. As depicted in fig. 1, clay targets are launched
from two houses, one from approx. 3 m above ground
(“high house”), and the other from 1 m above ground
(“low house”). The traps must be adjusted in a way
so that the targets cross over a defined central point
and that the flight distance is between 67 m and 69 m.
Within manual adjustment, the conformance to these
requirements is measured with a ring at the point
where the targets have to fly through (fig. 2), and by
measuring the distance between launcher and ground
impact. Further information about the shooting range
layout and the sporting rules can be found in (ISSF,
2013).
high
house
low
house
default flight paths
1
2
3
4
5
6
7
point marked
at the ground
shooting
stands
5 m
Figure 1: Schematic overview of Skeet shooting. The clay
target is launched from the high and the low house and must
be shot from the stands 1–7. Both flight paths must cross a
point over the center marked at the ground.
2 PROBLEM STATEMENT
While the flight through the desired intersection point
can be easily confirmed with a ring on top of a pole,
Andert, F., Freudenthal, S. and Levedag, S.
Visual Target Tracking in Clay Pigeon Shooting Sports: Estimation of Flight Parameters and Throwing Range.
DOI: 10.5220/0005674602950302
In Proceedings of the 11th Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2016) - Volume 3: VISAPP, pages 297-304
ISBN: 978-989-758-175-5
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
297
the determination of the throwing range is impossible
if the sports area is smaller than the typical flight dis-
tances (which is allowed by the rules) and surrounded
by nets or walls. This is a common case for safety
purposes, especially when multiple sports ranges are
close to each other. Since competition rules require
the throwing range value as a parameter to be deter-
mined, the adjustment process becomes circumstan-
tial, e.g. by removing the safety nets during this pro-
cess.
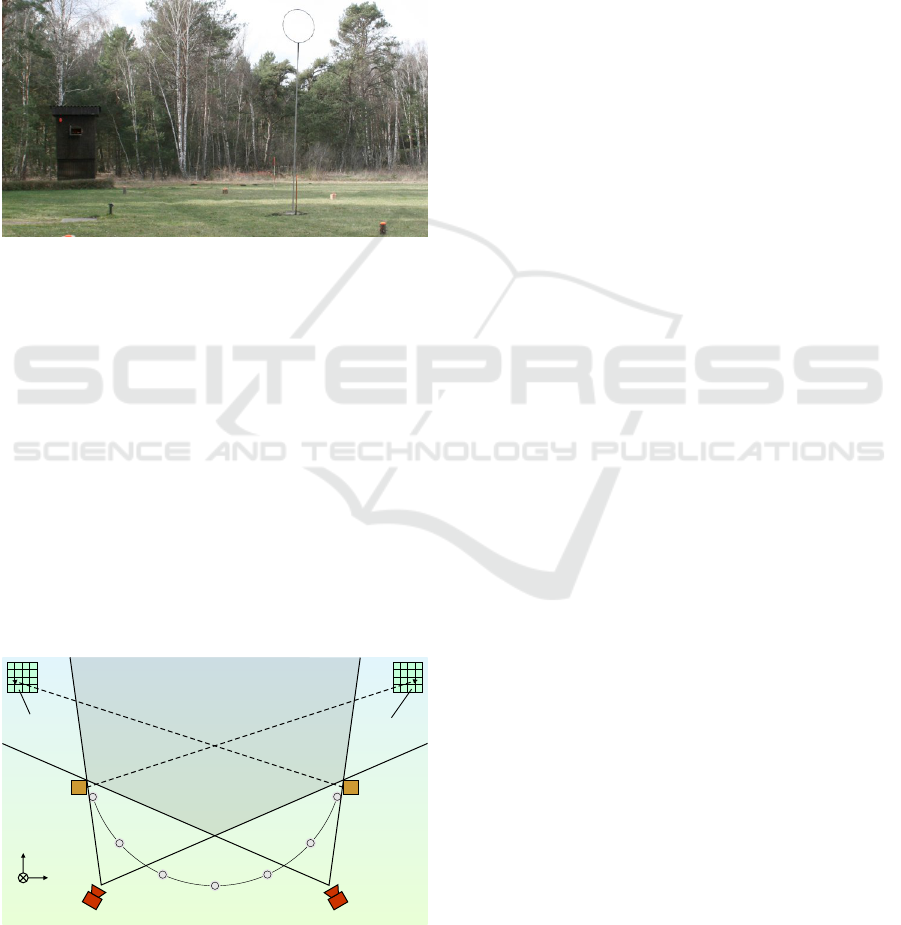
Figure 2: Skeet shooting range. High house with the
launcher and the ring where the target disc has to fly through
for launcher adjustment. The ring is removed afterwards.
To speed up this process, the idea is now to in-
stall a camera system to track the target discs. From
the image-based measurements, the flight path is re-
constructed and the flight parameters are estimated.
This can be done by measurements while the target
is flying inside the shooting range, which then allows
to extrapolate the further path outside. With that, the
throwing range is estimated independently of a flight
interruption e.g. by safety nets. Figure 3 illustrates a
setup with cameras which can be installed behind the
shooting area and thus do not disturb the sports ac-
tivities. To verify the flight path and throwing range
estimation, the ground impact is measured as an ad-
ditional reference (see also fig. 7 (b)), but there is no
area of stereo vision
measurements
impact
measuring
impact
measuring
camera 2
camera 1
x
y
z
Figure 3: Camera setup at a Skeet shooting range. The be-
ginning of the target’s flight is measured by stereo imagery
with a fixed camera system. Impact measurement is done
only here to verify the presented approach.
need to install this for further machine adjustment in a
real application. For correct measurements, the cam-
eras must be calibrated with intrinsic and extrinsic ori-
entation parameters.
3 THE FLIGHT OF ROTATING
DISCS
3.1 Related Work
To estimate the disc’s flight, this section introduces
how the trajectory of the thrown target can be mod-
eled in a suitable way. There is little scientific
work dealing with thrown clay targets directly (such
as (Denton, 2003) where a simulation setup is pre-
sented), however, the general physics of rotating discs
can be applied here. A more focused view on the
image-based detection of thrown objects is given e.g.
in (Csordás et al., 2015). Note that the main topics of
this paper are the flight kinematics, assuming general
knowledge of image detection and tracking methods.
A comprehensive examination of the physics of
rotating objects is presented in Lorenz’s Spinning
flight book (Lorenz, 2006). For example, the work
gives a detailed mathematical description of the flight
of a thrown frisbee. Its flight behavior is described as
straightly ahead upwards in the beginning and with a
veer to the left (meaning: against the direction of the
ego-rotation) after the disc has reduced its velocity.
Measurements with an instrumented frisbee-like disc
can confirm these observations (Lorenz, 2005). From
own observations, such a flight is apparently simi-
lar to a clay pigeon flight trajectory, just with slower
speeds.
There is some other related work concerning disc
flights, such as the report in (Hummel, 2003) which
starts with a historical review of research investiga-
tions of different kinds of thrown things such as the
flight of a javelin, frisbee or discus, and which gives
a detailed mathematical description used here for the
clay pigeon flight estimation. Another description is
given by (Morrison, 2005) which includes the basic
required equations. Possible applications are realis-
tic simulations (e.g. (Denton, 2003), (Crowther and
Potts, 2007)).
3.2 General Kinematics
Adapting the frisbee kinematics, a launched clay pi-
geon can be considered as a special case of a thrown
rotating disc with its specific properties, see the con-
stants in Tab. 1. These properties are known or can
VISAPP 2016 - International Conference on Computer Vision Theory and Applications
298

be measured easily, including the moment of inertia
tensor which is derived of the shape using Steiner’s
parallel axis theorem (see e.g. (Weisstein, 2007)).
The determination of the trajectory (i.e. the flight
state x over time, with 12 degrees of freedom describ-
ing 3D position, velocity, attitude, and rotation rates)
refers to a differential equation system
˙
x = f (x), de-
pendent on initial conditions x
0
and external influ-
ences, i.e. forces acting on the flying disc. In the
presented context, the denoted flight state refers to an
imaginary “hull” over the disc which does not rotate.
Furthermore, the movement calculation requires addi-
tional assumptions and some initially unknown aero-
dynamic coefficients as discussed later.
Table 1: Flight state values, coefficients, and parameters.
Symbol(s) Description
Flight State (components of x), disc hull without spin
p geodetic position: (x, y, z)
>
, local Cartesian
v velocity vector: (u, v, w)
>
, rotated to body
φ
φ
φ geodetic attitude: (Φ, Θ,Ψ)
>
, Euler angles
ω
ω
ω rotation rates: (p, q, r)
>
, body-fixed
Constants (default values or measured)
A disc area size: 0.0095 m
2
d disc diameter: 0.11 m
m disc mass: 0.105 kg
I inertia tensor: diag(1.33, 1.33, 2.57) · 10
−4
kg m
2
g gravity acceleration: 9.81 m/s
2
(default value)
ρ air density: 1.184 kg/m
3
(default value)
Coefficients
F
L
,C
L
lift force, lift coefficient
F
D
,C
D
, K drag force, drag coefficient, modeled helping constant
M,C
M
pitch moment, moment coefficient
N,C
N
yaw moment, moment coefficient
R,C
R
roll moment (neglected here)
Other variables
R
f g
rotation matrix: geodetic → flight body
R
f a
rotation matrix: aerodynamic → flight body
R
f φ
rotation matrix: Euler angle change → flight body
v
a
aerodynamic speed
α angle of attack
ω
spin
disc rotation (yaw rate inside hull)
t time (numbered time stamps)
Fig. 4 illustrates the factors which have an influ-
ence on the disc’s motion, being dependent on the ve-
locity, the angle of attack (i.e. the angle between the
direction of the velocity vector and the “forward” di-
rection d
1
in the disc plane), and the rotation rates.
Aerodynamic and gravity forces apply on different
points, resulting in rotational moments. Following
(Hummel, 2003), the occurrent forces can be trans-
formed into forces and moments, both acting on the
center of mass of the disc. While gravity can be
assumed as static for a specific place, aerodynamic
forces vary due to air conditions (wind, air pressure,
etc.), the disc’s shape and size, and the current flight
speed and direction.
mg
v
d
1
center of
mass
center of
pressure
F
D
F
L
mg
d
1
F
D
F
L
x
y
z
N,r
M,q
R,p
=
+
v
α
α
Figure 4: Forces and moments on a falling and rotating disc
(cf. (Hummel, 2003)). The main influences are the gravity
force (mg) and aerodynamic lift (F
L
) and drag (F
D
), depen-
dent on velocity v and the angle of attack α. The forces
applying on different points can be transformed into forces
and moments (N, M, R), both acting on the center of mass.
3.3 Flight Trajectory Model
The equation system
˙
x = f (x) to determine the flight
trajectory can be derived from the forces as described
in the given references. For the flight path calcula-
tions, the state x refers to an imaginary non-spinning
hull around the disc. The body-fixed x-axis is along
the direction of flight, i.e. it corresponds with the ve-
locity vector. The state components are geodetic posi-
tion p and attitude φ
φ
φ, and the hull-oriented velocity v
and turn rates vectors ω
ω
ω. Following the flight kinemat-
ics in (Lorenz, 2005), the differential equations for the
state components are denoted:
– Position (derived from velocity):
˙
p = R
>
f g
· v (1)
– Velocity (from forces and rotation):
˙
v =
1
m
· R
f a
−F
D
0
−F
L
+ R
f g
0
0
g
−ω
ω
ω × v (2)
– Attitude (from turn rates):
˙
φ
˙
φ
˙
φ = R
f φ
·ω
ω
ω (3)
– Turn rates (from pitch and yaw moments, and rota-
tion):
˙
ω
˙
ω
˙
ω = I
−1
R
f a
0
M
0
+ω
ω
ω×
0
0
N
+ (I ·ω
ω
ω) ×ω
ω
ω
(4)
The eqs. 1–4 are general for dynamically balanced
rigid bodies. Also general is the derivation of the
transformation matrices, e.g. R
f g
from the attitude
φ
φ
φ (see e.g. (Cai et al., 2011), pp. 23–34). There are
acting forces and moments, and they are derived as
follows: Within eq. 2, it is lift force (v
a
: aerodynamic
speed):
F
L
=
1
2
C
L
Aρv
2
a
(5)
Visual Target Tracking in Clay Pigeon Shooting Sports: Estimation of Flight Parameters and Throwing Range
299

with lift coefficient C
L
≈ C
L
0
+C
L
α
· α, which is ap-
proximately linear to the angle of attack in the consid-
ered limits (−10
◦
< α < 30
◦
). Perpendicular to lift,
the drag force F
D
is
F
D
=
1
2
C
D
Aρv
2
a
(6)
with the drag coefficient C
D
≈ C
D
0
+ K ·C
2
L
. While
the roll moment is minimal due to precession and thus
neglected in eq. 4, the other moment components are
modeled
M =
1
2
C
M
Aρv
2
a
d (7)
with pitch moment coefficient C
M
≈ C
M
0
+ C
M
α
· α,
and
N =
1
2
C
N
I
z
ω
spin
Aρv
2
a
d (8)
with C
N
as yaw moment coefficient. Here, ω
spin
de-
notes the “real” rotation rate of the disc inside the non-
rotating hull.
To derive a flight trajectory, an initial state x
0
and
the mentioned coefficients must be given. This is
done with the help of camera measurements as de-
scribed in the next section. As soon as the beginning
of the flight is known by that, the model parameters
and the full path can be derived by fitting the trajec-
tory with the measurements. This is outlined in sec-
tion 5.
Nevertheless, the model has some simplifications.
With regard to the achievable accuracy, the influence
of wind is of high importance, and the conversion
between geodetic and aerodynamic coordinates (i.e.
wind speed and direction) is assumed to be known and
constant here. Wind can be measured with a weather
station, however some very local wind gusts will have
a negative influence on the forecast of the flight. Since
there was no or almost no wind during the tests, this
influence is neglected first of all. Another large ef-
fect is the influence of the disc rotation ω
spin
. It is
assumed to be known (here measured by taking video
sequences of a marked disc from above), independent
of the launcher settings, and rather undamped over
the flight, which is a fair but not an exact approxi-
mation. There are remaining minor effects like roll
moment, variations in air density and gravity, Earth
curvature and rotation, and of course disc fabrication
tolerances, but all of them are neglected due to their
comparatively low influence or limited measurability.
4 3D MEASURING WITH A
STEREO CAMERA
The camera-based measurement of the disc’s flight
follows the classical principles of multi-view imagery
(e.g. (Hartley and Zisserman, 2000)). In the pre-
sented setup, the 3D positions are estimated from
non-parallel stereo image sequences, and with a large
baseline (>30 m) to achieve accurate results. Regard-
ing the practical applicability, the 3D positions of the
disc can be obtained from stereo or multi-view pairs
if the following constraints are fulfilled:
1) The camera system is stationary and easy to
calibrate. The calibration must determine intrinsic
parameters (principal point, focal length, lens distor-
tion) and extrinsic orientation (position and rotation
related to an external coordinate system). One suit-
able method is Kwon’s camera resectioning (Kwon,
1998). This method requires corresponding 2D im-
age points and 3D objects, and it is basically a direct
linear transform with non-linear optimization. For a
field setup, 3D objects with distinctive markers can
be installed and measured on the field once, which
allows automatic re-calibration of the cameras if re-
quired.
2) Corresponding images from all the cameras
must be recorded at equal times, requiring camera
synchronization. Depending on the used camera sys-
tem, this requires an external trigger input or visual
hints to find images with (closely) equal exposure
time stamps.
3) The thrown disc is visible in at least two images
at a time so that the pixel position of the target (i.e. its
center) can be triangulated, or, vice versa, a reprojec-
tion error minimization is unique. Segmentation and
tracking require good image quality with respect to
noise, lighting conditions, motion blur, and of course
general visibility. Background subtraction helps a lot
here. Fig. 5 shows an example of extracting a target
position from an image.
a
b
c
d
Figure 5: Example image of a flying clay disc. Full image
(a), zoom to the image region of interest (b), background
subtraction with amplified contrast (c), further filtering and
clustering of the disc (d).
VISAPP 2016 - International Conference on Computer Vision Theory and Applications
300

Successful disc segmentation might be followed
by tracking, and corresponding region centroids can
be assumed as homologous projections with chrono-
logical synchronism.
5 PATH FITTING AND
PARAMETER OPTIMIZATION
Following sec. 3.3, a flight trajectory x
1:t
max
: {x
t
}|t ∈
{1 . . . , t
max
} can be derived from the initial state x
0
and the required coefficients. Table 2 lists values,
measured by instruments or hand estimate, yielding a
trajectory that looks already like a thrown disc flight.
Some of the values differ between the high and short
house, and the investigation includes a short and a
long launch as described in the test section. How-
ever, such kind of path calculation does usually not fit
to camera observations. This means that the derived
path is already erroneous in the beginning, resulting
in a rather unqualified distance estimate.
Table 2: Initial flight state values and coefficients.
Variables Initial values
ω
spin
73 1/s (rad/s)
α 0.001 (rad)
p (-5.1, -19.4, -3.15)
>
m (high house);
(-5.3, 19.2, -1.42)
>
m (low house)
v (cos(α), 0, sin(α))
>
· 30 m/s
φ
φ
φ (0, Θ, Ψ)
>
(rad), with
Θ: 0.187 (long), 0.138 (short launch) at high house
Θ: 0.285 (long), 0.187 (short launch) at low house
Ψ: 1.31 (high house), 4.44 (low house)
ω
ω
ω (0, 0, 0)
>
Coefficients Initial value for optimization
C
L
0
0.1
C
L
α
1.9
C
D
0
0.2
K 0.8
C
M
0
-0.05
C
M
α
0.6
C
N
100
As depicted in Fig. 6, the idea is now to optimize
the roughly guessed or unknown parameters by find-
ing an optimized parameter set so that the resulting
trajectory will fit to the observations. With regard
to the aspired application, camera measurements will
be available only in the first phase of the flight, and
they are used to forecast the rest of the flight towards
the ground impact. To validate this procedure later in
the test section, hand-measurements of the impact are
taken as a reference for the distance estimate.
The optimization procedure works as
follows: Let c be the coefficient vector
a
b
c
d
camera measurements
estimated flight path
optimized flight path
estimation
impact estimation
from flight path
measured
impact
Figure 6: Principle to estimate the flight trajectory and
throwing range: camera measurements from a launched
disc and trajectory estimation from rough (i.e. assumed or
guessed) external parameters (a), parameter optimization by
fitting trajectory estimate and measurements (b), derivation
of the ground impact of the disc, i.e. intersection of flight
path and ground plane (c), comparison of estimated impact
and hand-measured impact to verify the path estimation (d).
(C
L
0
,C
L
α
,C
D
0
, K,C
M
0
,C
M
α
,C
N
)
>
to be optimized
and, accordingly, x(c)
1:t
max
the mapping function
c → x
1:t
max
dependent on c (and of course the fixed
inputs x
0
, ω
spin
, α
0
). Then, p(c)
1:t
max
denotes the disc
position over time as a subset of x(c)
1:t
max
. Further,
let Q
i
(p
t
) be the projection of a single disc position
p at time t to the image plane of the i-th camera.
With the image measurements q
i,t
with timestamps
t ∈ T ⊆ {1, . . . , t
max
}, and by using n cameras, a
parameter set c which produces a trajectory that fits
to the image measurements, solves
argmin
c
∑
t∈T
n
∑
i=1
kQ
i
(p
t
(c)) − q
i,t
k. (9)
This least reprojection error solution for c can be
derived with non-linear optimization, implemented
here with a Levenberg-Marquardt algorithm. It re-
quires an approximate initialization (see again Tab. 2)
and at least two cameras with significant observation
differences, i.e. a large stereo baseline. Within the
sequence of succeeding images, few missing obser-
vations (e.g. from bad image quality) are not critical.
6 TEST AND EVALUATION
The evaluation of the presented method requires to
measure the 3D path of the flying disc, to make an
estimate of its path by these measurements in order
to predict the impact and throwing distance, and to
compare this prediction with a measurement of the
true impact. Accurate measurements and predictions
are achieved with the following setup:
1) The cameras (Fig. 7(a)) are placed with a good
view on the expected disc flight, here at 4 m above
Visual Target Tracking in Clay Pigeon Shooting Sports: Estimation of Flight Parameters and Throwing Range
301

ground and with a stereo baseline of approximately
33 m. The usable horizontal field of view is around
70
◦
for each camera, the evaluation of pixels at the
highly distorted image edges is avoided.
2) Visual landmarks for camera calibration are
placed on the sports area within the camera fields of
view. Their 3D position is measured with a total sta-
tion with a 3D accuracy of around 1 cm (laser mea-
surement, see Fig. 7(c)). Camera calibration is per-
formed with images of the placed landmarks, and the
camera positions can be roughly validated with total
station measurements.
3) To verify the suitability of the path and dis-
tance calculation, the estimated impact position is
compared to the true impact which must be measured
by hand. A canvas with coordinate grid for ground
impact measuring is placed at the desired impact po-
sitions (Fig. 7(b)). The canvas grid coordinates are
also measured with the total station. Remember that
such a ground impact measurement is not available in
the application case.
4) After the preparations, measurements of thrown
discs are taken. Each launched disc flight is recorded
with two cameras (here: GoPro Hero 3 Black, WiFi
remote control). In the presented case, the cameras
use an internal WiFi-based exposure control. To vali-
date the simultaneousness of both camera sequences,
a light with short blinking (Fig. 7(d)) is placed in
the shared field of view. The light impulses (approx.
20–30 ms duration) are later visible in both image se-
quences. The cameras record images with 1280 x 720
pixels and with 120 frames per second. Following
(Matthies and Shafer, 1987) and assuming one pixel
accuracy of the target within the images, the 3D un-
certainty from triangulation is roughly 4 cm at all axes
just after the launch, and around 8 cm later at higher
distances to the cameras.
5) As a reference, the ground impact position on
the canvas is measured by hand and marked on the
canvas.
6) For each recorded launch, the 3D path of the
thrown disc is calculated. Based on that, the flight
parameters are estimated, and the further flight path
outside the visible area down to the impact is extrap-
olated. This returns an impact position (and with that,
the throwing range) estimation which is compared to
the manual measurement on the canvas.
7) Weather conditions are measured. Important
facts: Clear sky, mostly no wind.
The test campaign includes sixteen launches from
both houses. It contains two different configura-
tions of long and short throwing ranges depending
on the adjustment of the launching machine. Table 3
presents some facts about all flights: especially the
a
b
c
d
Figure 7: Measuring equipment: camera with 4 m height
above ground (a), measuring the ground impact on a canvas
with known coordinates (b), total station for camera land-
mark and other coordinate measurements (c), blinking light
to confirm the stereo camera synchronization (d).
measured throwing range and the error of the esti-
mation towards this range measurement. For each of
the four used launching configurations (low or high
house, and machine adjustment for a long or a short
throw), one example plot of the measured and esti-
mated flight path is shown in the figures 8 to 11. All
plots include the estimated path (–) and impact (•),
stereo measurements (·) and the hand-measured ref-
erence impact (+) of the particular clay target. The
plots show also the impacts of the other clay targets,
marked with a light gray (+) sign.
Table 3: Throwing distances and absolute values of the es-
timation errors.
No. house launch throw dist. estim. err. plot
1 low long 68.38 m 2.61 m Fig. 8
2 low long 68.22 m 3.22 m
3 low long 69.54 m 2.88 m
4 low long 68.27 m 3.23 m
5 low long 69.09 m 3.25 m
6 low short 55.03 m 1.31 m
7 low short 52.71 m 1.21 m
8 low short 56.45 m 2.97 m
9 low short 56.47 m 2.79 m
10 low short 54.76 m 1.07 m Fig. 9
11 high long 61.08 m 1.14 m Fig. 10
12 high long 62.39 m 0.54 m
13 high long 63.18 m 1.17 m
14 high short 49.07 m 4.07 m
15 high short 52.08 m 1.05 m Fig. 11
16 high short 53.54 m 0.74 m
Derived from the facts in Table 3, the most ob-
vious results are a throwing range variation of about
±2 m for a specific launcher configuration. Possible
reasons for this uncertainty may be the available im-
VISAPP 2016 - International Conference on Computer Vision Theory and Applications
302

precision of the launching machines itself, irregulari-
ties of the disc (tolerances, scratches etc.), but mainly
external influences like wind gusts. Another result is
the observed uncertainty of the estimation of up to
4 m, possibly due to bad measurements (e.g. errors
within camera calibration or systematic pixel uncer-
tainty) or due to imprecise or wrongly assumed input
parameters for the flight path estimation (especially
wind parameters and disc spin).
-20
-10
0
10
20
-50 -40 -30 -20 -10 0 10 20
x (m)
y (m)
estimated path
estimated impact
stereo measurements
measured impact
high house low house
camera
camera
Figure 8: Measured and estimated clay target flight,
launched from the low house with long throwing distance.
-20
-10
0
10
20
-50 -40 -30 -20 -10 0 10 20
x (m)
y (m)
estimated path
estimated impact
stereo measurements
measured impact
high house low house
camera
camera
Figure 9: Measured and estimated clay target flight,
launched from the low house with short throwing distance.
7 CONCLUSION AND FUTURE
APPLICABILITY
The paper presents a method to estimate the path of
flying pigeon clay targets, i.e. thrown rotating discs.
The method consists of a model derived by the acting
forces, and by camera measurements to obtain uncer-
tain parameters of this model. Based on the visual
observed, a fitting trajectory can be determined and
further extrapolated down to the impact position. It is
shown that the impact position can be estimated with
an accuracy of about three meters only with visual
measurements of the beginning of the flight, i.e. the
first half just after launch where the thrown disc is still
inside the sporting area. Based on that, it becomes
-20
-10
0
10
20
-20 -10 0 10 20 30 40 50
x (m)
y (m)
estimated path
estimated impact
stereo measurements
measured impact
high house low house
camera
camera
Figure 10: Measured and estimated clay target flight,
launched from the high house with long throwing distance.
-20
-10
0
10
20
-20 -10 0 10 20 30 40 50
x (m)
y (m)
estimated path
estimated impact
stereo measurements
measured impact
high house low house
camera
camera
Figure 11: Measured and estimated clay target flight,
launched from the high house with short throwing distance.
possible to estimate the throwing range without mea-
suring the impact itself. The desired application is the
target launching machine adjustment in order to fulfill
the requirements of the specified sporting clays disci-
pline. With the presented method, launching machine
adjustment will be faster and easier. Additionally, the
method is very convenient for sports areas where no
target impact is measurable due to surrounding safety
nets.
There is some potential for further optimization
and accuracy enhancement, especially with regard to
wind considerations and towards modeling the disc
spin damping. However, the principle is close to prac-
tical applications. For a sports setup, this means to
install fixed camera systems at the sporting area to-
gether with some non-disturbing or removable visual
landmarks with known coordinates for the camera
calibration routine. Further, measurement and path
estimation are to be automated and integrated into an
easily usable software. After this is achieved, games
are going to avail themselves of the new method.
ACKNOWLEDGEMENTS
Special thanks go to Stephan Lange from WTC
Wolfsburg for the provision of the sports facilities.
Visual Target Tracking in Clay Pigeon Shooting Sports: Estimation of Flight Parameters and Throwing Range
303

REFERENCES
Cai, G., Chen, B., and Lee, T. (2011). Unmanned Rotorcraft
Systems: Advances in Industrial Control. Springer.
Crowther, W. J. and Potts, J. R. (2007). Simulation of a spin-
stabilised sports disc. Sports Engineering, 10(1):3–21.
Csordás, R., Havasi, L., and Szirányi, T. (2015). De-
tecting objects thrown over fence in outdoor scenes.
In Proceedings of the 10th International Conference
on Computer Vision Theory and Applications, pages
593–599.
Denton, A. (2003). A 3d modelling and visualisation system
for clay pigeon shooting. Master’s thesis, Imperial
College, London.
Hartley, R. and Zisserman, A. (2000). Multiple View Ge-
ometry in Computer Vision. University Press, Cam-
bridge.
Hummel, S. A. (2003). Frisbee flight simulation and throw
biomechanics. Master’s thesis, Office of Graduate
Studies of the University of California, Davis.
ISSF (2013). International shooting sport fed-
eration: Official statutes and regulations.
url: http://www.issf-sports.org/documents/
rules/2013/ISSFRuleBook2013-2ndPrint-ENG.pdf,
Version 01/2014. Skeet setup at pp. 230–233.
Kwon, Y.-H. (1998). Direct linear transform method. url:
http://www.kwon3d.com/theory/dlt/dlt.html.
Lorenz, R. D. (2005). Flight and attitude dynamics of an
instrumented frisbee. Measurement Science and Tech-
nology, 16:738–748.
Lorenz, R. D. (2006). Spinning Flight: Dynamics of Fris-
bees, Boomerangs, Samaras, and Skipping Stones.
Springer.
Matthies, L. and Shafer, S. A. (1987). Error modeling in
stereo navigation. IEEE Journal of Robotics and Au-
tomation, 3(3):239–248.
Morrison, V. R. (2005). The physics of frisbees. Electronic
Journal of Classical Mechanics and Relativity.
Weisstein, E. W. (2007). Parallel axis theorem.
url: http://scienceworld.wolfram.com/physics/
ParallelAxisTheorem.html.
VISAPP 2016 - International Conference on Computer Vision Theory and Applications
304
