
Robust Pallet Detection for Automated Logistics Operations
Robert Varga and Sergiu Nedevschi
Technical University of Cluj-Napoca, Cluj-Napoca, Romania
Keywords:
Object Detection, Pallet Detection, Stereo Reconstruction.
Abstract:
A pallet detection system is presented which is designed for automated forklifts for logistics operations. The
system performs stereo reconstruction and pallets are detected using a sliding window approach. In this paper
we propose a candidate generation method and we introduce feature descriptors for grayscale images that are
tailored to the current task. The features are designed to be invariant to certain types of illumination changes
and are called normalized pair differences because of the formula involved in their calculation. Experimental
results validate our approach on extensive real world data.
1 INTRODUCTION
Automated Guided Vehicles perform (AGVs) logis-
tics operations without human intervention. This re-
quires the existence of a sensor capable of estimating
the position of the pallet that needs to be loaded by the
machine. This work focuses on developing a machine
vision-based detection system for pallets.
Pallets are wooden supports designed to hold
goods and are easily graspable by the forklift because
of its pockets. Pallets are standardized and for our
purposes they are handled from only one side. We de-
sire a flexible detection module that can identify the
relative position of the pallet from any image under
various lighting conditions.
Stereo cameras offer a good solution for 3D sens-
ing applications. The cost of such systems is lower
compared to laser scanners. Also camera systems of-
fer a full 3D view as opposed to 2D scan lines and the
possibility of high level reasoning on data. The main
drawback of such systems is the difficulty of working
in poor and rapidly changing illumination conditions.
We have studied previous vision-based attempts at
this problem and found that they are lacking because
of the following reasons: they rely on features that
do not possess good invariance properties; detection
performance is poor in general and especially in dark
regions; most systems are not thoroughly evaluated.
For the above mentioned reasons we propose im-
provements which constitute the main contributions
of this work:
• Original candidate generation method that enables
fast detection by quickly rejecting certain regions;
• The proposal of new grayscale features invariant
to certain types of illumination changes.
The paper is organized as follows: Section 2
presents existing approaches and important contribu-
tions from the image processing literature: edge de-
tection; feature vector extraction; classification. In
Section 3 we describe our proposed system and give
details about each processing step. Section 4 shows
experimental results that validate our system. Section
5 concludes the paper.
2 RELATED WORK
2.1 Sensor Types
The specific topic of load handling is not a well-
researched area. Approaches for autonomous load
handling use different types of sensors to obtain an
understanding about the environment. In (Weichert
et al., 2013) the authors discuss the advantages of sev-
eral sensors for this task. We will group these ap-
proaches into two main categories based on the sen-
sors used: range sensors and vision-based sensors
(monocular or stereo cameras). In the following we
describe relevant approaches from each category.
Some available systems rely on laser scanner data.
In most cases the sensor provides data along a 2D
scanline. Using laser has the advantage over cameras
that it is able to operate in complete darkness and it is
not affected by lighting conditions.
In (Walter et al., 2010) a detection system is pre-
470
Varga, R. and Nedevschi, S.
Robust Pallet Detection for Automated Logistics Operations.
DOI: 10.5220/0005674704700477
In Proceedings of the 11th Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2016) - Volume 4: VISAPP, pages 470-477
ISBN: 978-989-758-175-5
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

sented for the autonomous manipulation of a robotic
lift truck. The authors use closest edge detection ap-
plied on the sensor point cloud. SICK industries man-
ufacture laser scanners for multiple purposes. A work
from (Bostelman et al., 2006) presents a pallet detec-
tion method using such sensors. A solution is pro-
vided for unloading operations inside trucks. The
walls of the trucks are detected by applying a Hough
transform (Hough, 1962), (Duda and Hart, 1972).
The paper (Katsoulas and Kosmopoulos, 2001) uses
laser sensors to detect the positions of boxes of stan-
dard dimensions. Kinect sensors can be employed for
distance estimation as in (Oh et al., 2013). However,
they are not suitable for an industrial environment and
they offer a small field of view.
A hybrid approach from (Baglivo et al., 2011)
combines two types sensors: a laser scanner and a
camera. A fusion is performed at object level between
the detection from the color image and the points from
the laser. Edge template matching with distance trans-
form is applied on the color image. Both sensors must
agree on the detection, ensuring robustness. The sys-
tem requires the calibration of the two sensors. The
authors have evaluated their system on 300 examples
with results indicating a good localization precision.
They have found difficulties due to lighting conditions
in 5 cases.
Vision-based approaches employ multiple cues: in
(Kim et al., 2001) line-based model matching is used;
(Pages et al., 2011) performs colour-based segmenta-
tion; (Seelinger and Yoder, 2006) uses easily identifi-
able features (landmarks, fiducials); (Cucchiara et al.,
2000) employ corner features, region growing and de-
cision tree; in (Byun and Kim, 2008) least squares
model fitting is applied. Most authors perform eval-
uation on a small dataset or in laboratory conditions.
The work (Seelinger and Yoder, 2006) presents results
on 100 operations with a success rate of 98%. Also,
their approach requires the installation of landmarks
on each pallet.
A paper from (Varga and Nedevschi, 2014)
presents a detection approach relying on integral
channel features. The authors evaluate their system
on an impressive dataset containing 8000 test images.
Other approaches include: (Nyg
˚
ards et al., 2000),
(Prasse et al., 2011), (Pradalier et al., 2008).
2.2 Detection Approaches
Sliding window object detection is one of the most
commonly used approaches employed in the techni-
cal literature. Typical examples of particular detec-
tors include face detectors (Viola and Jones, 2001),
(Yang et al., 2002), pedestrian detectors (Doll
´
ar et al.,
2012), (Benenson et al., 2014), (Doll
´
ar et al., 2014).
The success of this general approach can be attributed
to the fact that it uses a powerful classifier to discern
between background and target object. Since the clas-
sifier is a cascade it eliminates zones without objects
quickly.
Features for detection should capture structure,
texture and color if possible. Some of the more im-
portant features that are relevant for this work are: any
edge feature defined on the image gradient (Mikola-
jczyk et al., 2003); Histogram of Oriented Gradients
(Dalal and Triggs, 2005) - developed originally for
pedestrian detection; Haar features (Viola and Jones,
2001); integral channel features (Dollar et al., 2009);
CENSUS features (Zabih and Woodfill, 1994); Lo-
cal Binary Patterns and their histograms (Ojala et al.,
1994), (Ojala et al., 1996).
Fast and accurate detection is possible with
boosted classifiers (Schapire, 1990) and soft cascades
(Bourdev and Brandt, 2005). This was first proposed
by Viola & Jones for face detection in (Viola et al.,
2005) but since has been adopted to pedestrian detec-
tion (Doll
´
ar et al., 2010). Many top performing meth-
ods on benchmarks utilize such classifiers for their
speed.
3 PROPOSED APPROACH
Our proposed solution relies on exploiting two main
sources of visual information: intensity images and
stereo cameras. The intensity image provides in-
formation about 2D localization of the pallets. The
stereo cameras are used to obtain the 3D position and
orientation of the pallet relative to the cameras. We
have found 3D-based detection less reliable because
of poor reconstruction quality at pallet pockets.
Although our pallet detector is an application of
the standard sliding window technique our system has
to generate bounding boxes that are tight and pre-
cise. The requirements regarding exact localization
are strict. Pallets need to be localized with a preci-
sion of 1 cm. This explains why experimenting and
developing specific features are required. Also, the
detection method should be highly accurate.
In the following we first present the processing
steps required for detection. Stereo reconstruction is
described at a glance. Next, we provide details about
the candidate generation module. Afterwards, we in-
troduce descriptive features proposed specifically for
pallet detection. We have proposed several validation
steps at the post processing stage for more robustness
and enhanced localization.
Robust Pallet Detection for Automated Logistics Operations
471

3.1 Stereo Reconstruction
Reconstruction is performed with semi-global match-
ing and CENSUS local descriptors. Our system
makes use of the rSGM implementation (Span-
genberg et al., 2014). CENSUS/LBP descriptors
have been found to be a reliable local descrip-
tor for many practical applications including those
from the automotive industry. Semi-global match-
ing (Hirschmuller, 2005) offers the advantage of hav-
ing smooth disparity maps and it is fast enough for
our purposes. The rSGM implementation is fast and
runs on CPU. It includes optimizations with SSE in-
structions and it is a top performing method on stereo
benchmarks.
3.2 Edge and Line Detection
For improving edge detection quality we rely on ex-
tracting normalized gradient values. This has been
proposed and employed in calculating HOG (Dalal
and Triggs, 2005) features and also in modern pedes-
trian detection algorithms (Doll
´
ar et al., 2010). Nor-
malized gradient values are obtained by box-filtering
the gradient magnitude and dividing the original gra-
dient magnitude and other channels by the filtered val-
ues. This ensures successful edge detection even in
dark regions.
In the following we provide the exact steps for cal-
culating the normalized gradient maps. The gradient
components along the x and y axes are obtained in a
standard way by convolution with Sobel filters:
G
x
= I ∗ S
x
(1)
G
y
= I ∗ S
y
(2)
The gradient magnitude is defined as the L
1
norm
of the two components:
M = |G
x
| + |G
y
| (3)
The box filtered magnitude will act as a normal-
ization factor:
ˆ
M = M ∗ B (4)
where B is a square box-filter of dimension w x w.
Typical values for w are odd numbers from the inter-
val [5,25]. It is important to note that this filtering can
be performed in O(1) time per pixel for any filter size
w. Filtering with a Gaussian would increase the com-
putation with no significant benefit. The normalized
magnitude and the normalized gradient components
are obtained by dividing the original values with the
box filtered gradient magnitude (pixel by pixel):
M = M/(
ˆ
M + ε) (5)
G
x
= λ · G
x
/(
ˆ
M + ε) (6)
G
y
= λ · G
y
/(
ˆ
M + ε) (7)
All division and summation operations in the pre-
vious definitions are carried out element by element.
The small constant ε = 5e−3 avoids division by zero.
The multiplier λ is required for converting the nor-
malized values into the [0,255] interval.
Intuitively this operation produces strong re-
sponses where the relative change in intensity is
large compared to the average intensity change in the
neighboring region. This improves edge detection in
poorly illuminated regions.
3.3 Candidate Generation
Considering all possible positions for sliding window
detection results in a large number of possible can-
didates (see experimental results sections for typical
numbers). It is not feasible to classify each possible
candidate to see whether or not it is a pallet. This is
why it is important to have a good candidate genera-
tion module. The main characteristics should be:
• high coverage - the module should not miss any
real pallet positions (i.e. low number false nega-
tives, high recall);
• fast to evaluate - can be executed instantly in com-
parison to following modules;
• high rejection rate - it should accept only a lim-
ited number of candidates to speed up, help and
validate further processing steps.
Currently we are working with two main ap-
proaches for candidate generation. These improve the
baseline approach which is just to take every possible
rectangle at valid positions and scales. Edge-based
candidate generation relies on edge detection while
the other alternative uses stereo information. We pro-
vide details in the following.
3.3.1 Edge-based Candidate Generation
Since the frontal view of pallets is a rectangle the can-
didate generator should produce a list of candidate
rectangles. For this we first employ the normalized
gradient in the y direction as in eq. 7 to detect im-
portant horizontal lines called horizontal guide lines.
A histogram that accumulates gradient values along
each line is used to find local maxima. In other words
we perform a projection along the horizontal direc-
tion. Since the structure of the image usually contains
strong horizontal lines this step is robust and we can
rely on the extracted guidelines later on.
Vertical lines are detected only between guideline
pairs that respect the dimension constraints. These
lines are detected where the sum of gradient along x
VISAPP 2016 - International Conference on Computer Vision Theory and Applications
472

Figure 1: Stereo-based candidate generation; top-left - dis-
parity histogram; top-right - original image with reduced
region of interest marked; bottom-left - v-disparity map;
bottom-right - disparity map with only the neighborhood
of principal disparity highlighted, also the projections along
the two axis are visualized and the new boundaries detected.
direction exceeds a certain percentage (10 %). The
resulting candidate rectangles arise from combining
vertical edges that fit the dimension constraints re-
garding width, height and aspect ratio.
3.3.2 Disparity-based Candidate Generation
We can limit the region of interest for processing by
considering only the objects with fronto-parallel sur-
faces. The reason for this is that the axis of the stereo
system is roughly perpendicular to the target pallets.
Such objects appear as a line in the v-disparity and
u-disparity map. Also, they lie on the disparity plane
with high appearance frequency. We define the prin-
cipal disparity as the disparity value that corresponds
to the highest local maximum from the disparity his-
togram. The highest local maximum is considered be-
cause this corresponds to the obstacle in front of the
camera. We call principal disparity plane the plane
obtained by selecting only points that are close to the
principal disparity. This is equivalent to highlighting
only the objects that are closest from the visual scene.
Once the principal disparity value is determined
the region of interest can be limited to the zone where
such disparity values are frequent. We do this by start-
ing from the extremities (left, right and bottom) and
shrink the boundary of the original region of interest
until the frequency of the preponderant disparity ex-
ceeds a limit (see Figure 1). Principal disparity also
gives us information about the approximate and ex-
pected dimensions of the pallets in the image plane.
This also reduces the number of possible candidates.
We apply normal edge-based candidate generation on
the reduced region of interest and apply the new con-
straints found regarding the size of the pallet.
3.4 Feature Extraction
The principal characteristic features of pallets are
their structure. It is therefore important to have fea-
tures that capture the structure of the pallet. Previous
work used integral features defined on manual rect-
angular subregions, edge features, Hough transform
and corner features. We have experimented with other
features for two reasons: to capture the structure of
the pallet in a concise way and to ensure a representa-
tion that is more invariant to illumination changes.
3.4.1 Proposed Grayscale Features - Normalized
Pair Differences
Our goal was to introduce a grayscale feature that is
sufficiently descriptive and also invariant to illumina-
tion changes. A simple way to model illumination
change is multiplication by a constant value. Techni-
cally, this represents a gain change, but it is a good
approximation. The features should be unaffected by
this kind of operation. Weber’s law states that ”just-
noticeable difference between two stimuli is propor-
tional to the magnitude of the stimuli” (Ross and
Murray, 1996). Features therefore should be defined
as ratios to capture relative change. This idea was
employed before in other descriptors such as WLD
(Chen et al., 2010), however here we propose a dif-
ferent form.
We use this principal to calculate our features. An
option would be to normalize features by dividing
with the mean of the surrounding region. However,
we do not want the surrounding region to affect the
descriptor of the pallet. Instead we want and invariant
representation that will be the same for the same pal-
let. This observation leads to the necessity of defin-
ing features using only the intensity values inside the
bounding box.
First, the bounding box is resized to a fixed size
(5 x 20). This reduces the pallet to a smaller num-
ber of intensity values and also amounts to a low pass
filtering. It is necessary to remove the regions cor-
responding to pallet pockets. These regions are not
part of the object and bear no relevance to the detec-
tion task. Second, we take each possible pair of inten-
sity values. The sample intensity values are denoted
f
i
and are obtained from the previous downsampling
operation. See Figure 2 for illustration of the defined
concepts.
We denote these features as normalized pair dif-
ferences (npd). Feature values are calculated by con-
sidering all pairs, taking the difference and divid-
ing by the first value from each pair. A sigmoid-
type function is applied afterwards. Intensity features
where the mask is 0 are not used:
D
k
= tan
−1
f
i
− f
j
f
i
+ ε
(8)
The role of the inverse tangent function is to limit
Robust Pallet Detection for Automated Logistics Operations
473

Figure 2: Feature grid of 3 x 16 overlaid on a pallet. After
resizing each square cell will become one single intensity
value. The cells from the red region are not used (mask =
0).
the range of the features, i.e. it is used as a sigmoid-
type function. All possible pairs taken from valid
positions form a signature that describes the pallet.
Adding a small number ε = 1e −2 to the denominator
avoids checking for zero division and simplifies the
code for the algorithm. It is easy to see that if all in-
tensity values are uniformly multiplied with a value
α, signifying a change in illumination, the value of
the descriptor does not change.
This signature will be compared by the classifier at
detection time. The signature should remain roughly
the same even after illumination changes. We use a
rectangle grid of dimension 5 x 20. The dimension
of this type of feature vector is 1350 (some pairs are
missing from the
100
2
= 4950 because we exclude
the zones from the pockets).
3.4.2 Edge Features
We also define edge features on rectangular areas near
the pallet boundary in order to help in precise local-
ization. The edge features are calculated on the nor-
malized gradient channel. The descriptors are defined
in equation 9 as normalized sums of the normalized
gradient values calculated on rectangular areas de-
picted in Figure 3. The upper edges of the pockets are
not used since they can be covered by plastic hanging
from the palletized goods. The dimension of this type
of feature vector is 9.
Figure 3: Support regions for calculating normalized gradi-
ent sums.
E
k
=
1
area(R
k
)
∑
(x,y)∈R
k
M(x,y) (9)
3.4.3 LBP Histogram
For texture features we use a histogram of local binary
patterns. This has shown to be a reliable texture de-
scriptor and it is also employed in many stereo match-
ing systems. LBP descriptors also possess good illu-
mination invariant properties since only the relative
order of intensity values are important. The dimen-
sion of this type of feature vector is 256.
H
k
=
1
area(R)
∑
(x,y)∈R
[mask(x, y) = 1][lbp(x,y) = k]
(10)
The last definition uses the standard Iverson
bracket notation: [expr] is 1 if the logical expression
expr is true and 0 otherwise. The histogram is sim-
ply the count of each type of LBP feature that is in a
valid position. The counts are normalized appropri-
ately with the area of the bounding box R(see Figure
3). The area refers to only the zone from the rectangle
that is not invalidated by the mask.
3.5 Classification and Detection
Boosted decision trees offer both high classification
accuracy and fast prediction time. Since predic-
tion is made by comparing individual features against
threshold the time taken does not depend on the di-
mension of the feature vector. Since we know before-
hand the number of desired pallets we can keep only
the pallets with the highest confidence values.
The classifier is trained using the positive exam-
ples available from the manual annotations. Negative
samples are generated automatically from each train-
ing image from regions that surely do not contain any
pallets. Retraining the classifier with hard negatives
has proven not to be helpful.
3.6 Refinement and Validation
We have found it best to enable the detector to re-
turn matches that are not precisely localized and then
refine their position and scale. Bounding boxes that
have good aspect ratio will have their scores improved
by a multiplicative factor of 2. In cases where 2 pal-
lets are required to be detected we boost the scores of
each candidate pair that lies on the same y position
and have approximately the same size.
The standard non-maximum suppression that is
applied to every overlapping bounding box pair is
slightly modified. In case of an overlap only the can-
didate with the higher score is retained. Two bound-
ing boxes are considered to overlap if the overlap
VISAPP 2016 - International Conference on Computer Vision Theory and Applications
474

along the x axis is larger than 10 % and if the over-
lap along the y axis is larger than 0. A small overlap
between detected bounding boxes along the x axis is
possible when the pallets are far away and close to
each other.
Since we have knowledge about the number of
pallets that are required to be detected we can return
only the most confident detections. Final pallet posi-
tion is reconstructed from the plane fitted on the rect-
angular bounding box that is detected. This also pro-
vides us the orientation of the object.
4 EXPERIMENTAL RESULTS
All processing steps have been implemented in C++.
The project uses OpenCV library for low-level image
processing functions such as the bilateral filter, box
filter, image reading/writing.
4.1 Feature Properties
We run tests to evaluate the invariance properties of
the features we use. A sequence containing 317 mea-
surements is recorded of a static pallet with varying
exposure time. The change in exposure time modi-
fies the appearance of the pallet from barely visible
to saturated white. Descriptors are extracted from the
same region. We evaluate the mean and the maximum
of the standard deviations of each component. Also,
the Euclidean distance is calculated between each de-
scriptor pair and the mean and the maximum is found.
We divide by the feature dimension for a fair compar-
ison. All feature values are normalized to be in the
range [-1, 1]. Table 1 shows the results, entries are or-
dered from top to bottom from least invariant to most
invariant (we show only values for differences). The
npd features have similar properties as the lbp his-
togram but they are more descriptive and structure in-
formation is maintained. These features change less
under the tested conditions compared to the intensity
and edge features.
Table 1: Measuring exposure invariance properties of dif-
ferent descriptor types.
Feature dim. mean diff. max diff.
intensity 53 3.78e-02 1.09e-01
edge 53 2.44e-02 4.23e-02
npd 1327 2.74e-03 6.11e-03
lbp 256 2.93e-04 8.43e-04
4.2 Pallet Detection Accuracy
For evaluation purposes we use the same dataset and
the same criteria as the work from (Varga and Nede-
vschi, 2014). The dataset was acquired from a real
warehouse and was manually labeled. The detector
is trained on a subset of the whole dataset. This part
does not overlap with the test set on which we per-
form all evaluation. Two test sets are available: test
set 1 which is somewhat similar to the training set
having been acquired in the same recording session,
also this contains the most annotated pallets; and test
set 2 originating from a separate recording session.
The second test set is more challenging and contains
mostly difficult cases. The composition of the sets is
as follows: training set contains 467 images and 891
labeled pallets (there can be zero or more than one
pallet in each image); test set 1 contains 7122 images
and 9047 labeled pallets; test set 2 contains 224 im-
ages and 356 labeled pallets. The final model installed
in the system on the AGV was trained on all the avail-
able data.
The values of some of the parameters are given
in the following. Region of interest dimensions: 400
x 1440; Bilateral filter sigma in the coordinate space
σ
x
= 5; Gradient box filter dimension w = 15; Gra-
dient multiplier λ = 40; Horizontal edge detection
non-maximum suppression neighborhood size h = 3;
Vertical edge detection non-maximum suppression
neighborhood size v = 3.
Since all scores depend on determining whether
or not two rectangles overlap sufficiently we state pre-
cisely what we consider as an overlap. Usually for ob-
ject detection intersection over union (PASCAL VOC
criteria) is used to determine overlap. Here, we de-
fine the absolute positioning error along the x axis E
x
as the difference between the union and overlap of
the intervals along the x axis of the two rectangles.
E
y
, The absolute positioning error along the y axis is
defined analogously. We consider an overlap a pre-
cise match if E
x
≤ 15 and E
y
≤ 15; and a normal
match if E
x
≤ 50 and E
y
≤ 50. Our overlap measures
are more strict than the relative overlap of the pascal
VOC measure because of the system requirements. E
x
is approximately equals twice the positioning error in
pixels. A precise position amounts to an error of 7.5
pixels ≈ 1.5 cm using our hardware setup.
Candidate generation algorithms are evaluated by
checking if every bounding box defined in the ground
truth is provided by the module. The percentage of
recalled bounding boxes is defined as the coverage.
A box is recalled if it overlaps sufficiently with the
ground-truth box. We have considered an absolute
overlap when the absolute positioning error is less
Robust Pallet Detection for Automated Logistics Operations
475
than 15 px along both axis. The results with different
methods on the training dataset is presented in Table
2. Even though we do not achieve full coverage, rect-
angles near the ground truth are obtained. Using post
processing and corrections the localization precision
of the detection can be improved.
Table 2: Comparison of different candidate generation
schemes. The approach from the last row offers an accept-
able coverage while drastically reducing the number of can-
didates generated per image. The numbers in the parenthe-
ses indicate the step size in horizontal and vertical direction
and the filter size (where applicable).
Method Coverage Avg. nr.
candidates
All(5,5) 100 % 1370k
Grid(7,7) 99.40 % 508k
Edge(5,3) 99.52 % 374k
Normalized gradient
(3,3,15)
98.81 % 35k
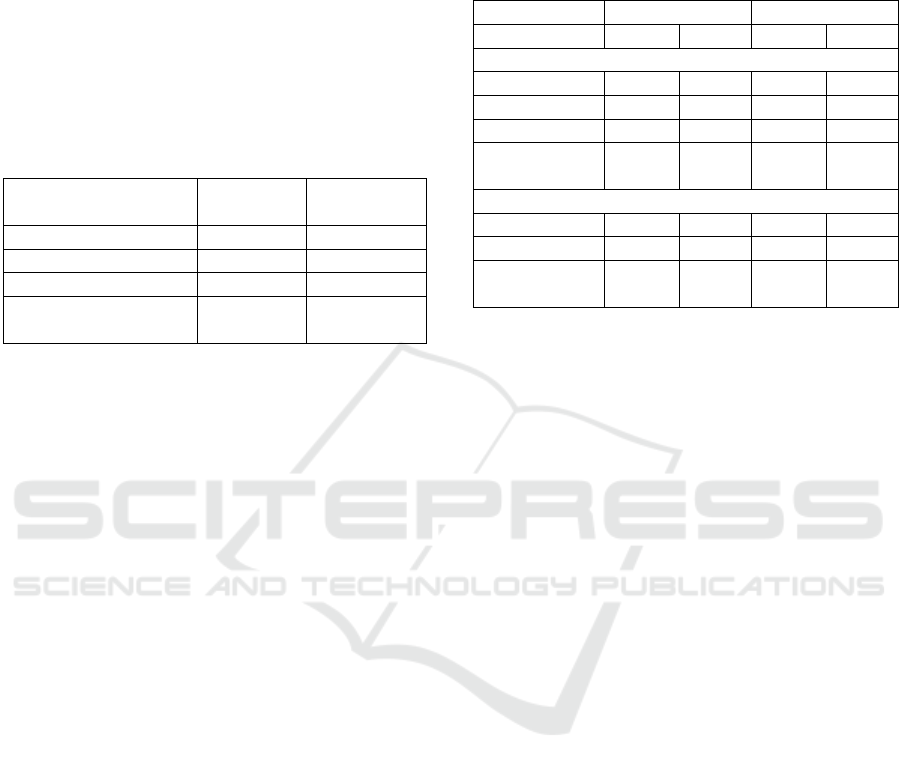
We now turn to evaluating pallet detection accu-
racy. Table 3 shows the detection accuracy on the two
test sets using different configurations. The effect of
adding new feature types is evaluated. We present test
results using a boosted classifier with 100 and 1000
weak learners respectively. The number of negatives
signifies per image is set in accordance with the power
of the classifier. The training set can contain more
than 1 million examples. If we weigh the error on pos-
itive instances more by ω times we can obtain a more
precise localization. The npd-linear feature performs
worse on the harder test set 2. Clear improvements
can be seen with the new features and each additional
feature improves the detection accuracy. Missed de-
tections arise when the images are too dark, when the
pallets are not fully visible or when false detections
appear due to glare from the plastic covering the pal-
letized goods.
The typical running times for the processing mod-
ules are: rectification and disparity map generation
60 ms; candidate generation 20 ms; feature extraction
800 ms; classification 300 ms. All these operations
are performed on the region of interest of size 400 x
1440 = 0.576 Mpixels. Training the classifier with ap-
proximately 1 million examples and the feature vector
of dimension 1591 takes a couple of hours.
5 CONCLUSIONS
The purpose of this work was to present a pallet detec-
tion method. We have improved on existing results by
designing and implementing a better candidate gener-
ation module and providing better features. Detection
Table 3: Detection accuracy in percentages for multiple
model configurations; evaluation on both test sets; nor-
mal localization and precise localization is considered. For
comparison we include the integral features from (Varga
and Nedevschi, 2014) (code is provided by the authors).
test set 1 test set 2
Features normal precise normal precise
100 weak learners + 100 negatives/image
integral ftrs. 79.0 64.2 - -
npd 80.6 65.1 80.9 40.1
npd+edge+lbp 97.1 90.2 87.7 46.0
npd+edge+lbp
+ ω = 10
97.7 92.6 87.7 70.5
1000 weak learners + 1000 negatives/image
integral ftrs. 92.0 75.4 77.0 38.0
npd+edge+lbp 100 94.9 93.5 65.7
npd+edge+lbp
+ ω = 2
98.9 95.4 91.9 68.8
accuracy was evaluated on a large test set and com-
pared to an existing approach. Our system performed
much better in every category.
We have learned that normalized gradient values
enable a more robust edge detection and permit us to
generate a small set of candidates. More descriptive
features result in higher detection accuracy.
Future work will involve optimizing the execution
time of the feature extraction module because it cur-
rently dominates the pipeline. Increasing the local-
ization precision with post-processing steps is also of
interest.
ACKNOWLEDGEMENTS
PAN-Robots is funded by the European Commission
under the 7th Framework Programme Grant Agree-
ment no. 314193. The partners of the consortium
thank the European Commission for supporting the
work of this project. We would like to thank our
project and Elettric80 for the opportunity to perform
tests at the warehouse in Viano, Italy.
REFERENCES
Baglivo, L., Biasi, N., Biral, F., Bellomo, N., Bertolazzi, E.,
Lio, M. D., and Cecco, M. D. (2011). Autonomous
pallet localization and picking for industrial forklifts:
a robust range and look method. Measurement Science
and Technology, 22(8):085502.
Benenson, R., Omran, M., Hosang, J., and Schiele, B.
(2014). Ten years of pedestrian detection, what have
we learned? In ECCV-CVRSUAD. IEEE.
VISAPP 2016 - International Conference on Computer Vision Theory and Applications
476

Bostelman, R., Hong, T., and Chang, T. (2006). Visualiza-
tion of pallets. In SPIE Optics East.
Bourdev, L. and Brandt, J. (2005). Robust object detection
via soft cascade. In CVPR, pages II: 236–243.
Byun, S. and Kim, M. (2008). Real-time positioning and
orienting of pallets based on monocular vision. In IC-
TAI (2), pages 505–508. IEEE Computer Society.
Chen, J., Shan, S., He, C., Zhao, G., Pietik
¨
ainen, M., Chen,
X., and Gao, W. (2010). Wld: A robust local image
descriptor. IEEE Trans. Pattern Anal. Mach. Intell,
32(9):1705–1720.
Cucchiara, R., Piccardi, M., and Prati, A. (2000). Focus
based feature extraction for pallets recognition. In
BMVC.
Dalal, N. and Triggs, B. (2005). Histograms of oriented gra-
dients for human detection. In CVPR, pages I: 886–
893.
Doll
´
ar, P., Appel, R., Belongie, S., and Perona, P. (2014).
Fast feature pyramids for object detection. PAMI.
Doll
´
ar, P., Belongie, S., and Perona, P. (2010). The fastest
pedestrian detector in the west. In BMVC, pages 1–11.
British Machine Vision Association.
Dollar, P., Tu, Z. W., Perona, P., and Belongie, S. (2009).
Integral channel features. In BMVC.
Doll
´
ar, P., Wojek, C., Schiele, B., and Perona, P. (2012).
Pedestrian detection: An evaluation of the state of
the art. IEEE Trans. Pattern Anal. Mach. Intell,
34(4):743–761.
Duda, R. and Hart, P. E. (1972). Use of the hough transfor-
mation to detect lines and curves in pictures. CACM,
15:11–15.
Hirschmuller, H. (2005). Accurate and efficient stereo pro-
cessing by semi-global matching and mutual informa-
tion. In CVPR, pages II: 807–814.
Hough, P. V. C. (1962). A method and means for recogniz-
ing complex patterns. U.S. Patent No. 3,069,654.
Katsoulas, D. and Kosmopoulos, D. I. (2001). An efficient
depalletizing system based on 2d range imagery. In
IEEE International Conference on Robotics and Au-
tomation, 2001. Proceedings 2001 ICRA., volume 1,
pages 305–312. IEEE.
Kim, W., Helmick, D., and Kelly, A. (2001). Model based
object pose refinement for terrestrial and space auton-
omy. In International Symposium on Artificial Intelli-
gence, Robotics, and Automation in Space, Montreal,
Quebec, Canada.
Mikolajczyk, K., Zisserman, A., and Schmid, C. (2003).
Shape recognition with edge-based features. In
BMVC.
Nyg
˚
ards, J., H
¨
ogstr
¨
om, T., and Wernersson,
˚
A. (2000).
Docking to pallets with feedback from a sheet-of-light
range camera. In IROS, pages 1853–1859. IEEE.
Oh, J.-Y., Choi, H.-S., Jung, S.-H., Kim, H.-S., and Shin,
H.-Y. (2013). An experimental study of pallet recogni-
tion system using kinect camera. In Advanced Science
and Technology Letters Vol.42 (Mobile and Wireless
2013), pages 167–170.
Ojala, T., Pietikainen, M., and Harwood, D. (1994). Perfor-
mance evaluation of texture measures with classifica-
tion based on kullback discrimination of distributions.
In ICPR, pages A:582–585.
Ojala, T., Pietikainen, M., and Harwood, D. (1996). A com-
parative study of texture measures with classification
based on feature distributions. Pattern Recognition,
29(1):51–59.
Pages, J., Armangue, X., Salvi, J., Freixenet, J., and Marti,
J. (2011). Computer vision system for autonomous
forklift vehicles in industrial environments. The 9th.
Mediterranean Conference on Control and Automa-
tion.
Pradalier, C., Tews, A., and Roberts, J. M. (2008). Vision-
based operations of a large industrial vehicle: Au-
tonomous hot metal carrier. J. Field Robotics, 25(4-
5):243–267.
Prasse, C., Skibinski, S., Weichert, F., Stenzel, J., M
¨
uller,
H., and Hompel, M. T. (2011). Concept of automated
load detection for de-palletizing using depth images
and RFID data. International Conference on Con-
trol System, Computing and Engineering (ICCSCE),
pages 249–254.
Ross, H. and Murray, D. J. (1996). E.H.Weber on the tac-
tile senses 2nd ed. Hove: Erlbaum (UK) Taylor and
Francis.
Schapire, R. (1990). The strength of weak learnability.
MACHLEARN: Machine Learning, 5.
Seelinger, M. J. and Yoder, J.-D. (2006). Automatic visual
guidance of a forklift engaging a pallet. Robotics and
Autonomous Systems, 54(12):1026–1038.
Spangenberg, R., Langner, T., Adfeldt, S., and Rojas, R.
(2014). Large scale semi-global matching on the CPU.
In Intelligent Vehicles Symposium, pages 195–201.
IEEE.
Varga, R. and Nedevschi, S. (2014). Vision-based auto-
matic load handling for automated guided vehicles. In
Intelligent Computer Communication and Processing,
pages 239–245. IEEE.
Viola, P. and Jones, M. (2001). Rapid object detection using
a boosted cascade of simple features. Proc. CVPR,
1:511–518.
Viola, P. A., Platt, J. C., and Zhang, C. (2005). Multiple
instance boosting for object detection. In NIPS.
Walter, M. R., Karaman, S., Frazzoli, E., and Teller, S. J.
(2010). Closed-loop pallet manipulation in unstruc-
tured environments. In IROS, pages 5119–5126.
IEEE.
Weichert, F., Skibinski, S., Stenzel, J., Prasse, C., Kama-
gaew, A., Rudak, B., and ten Hompel, M. (2013). Au-
tomated detection of euro pallet loads by interpreting
PMD camera depth images. Logistics Research, 6(2-
3):99–118.
Yang, M.-H., Kriegman, D. J., and Ahuja, N. (2002). De-
tecting faces in images: A survey. IEEE Trans. Pattern
Anal. Mach. Intell, 24(1):34–58.
Zabih, R. and Woodfill, J. (1994). Non-parametric local
transforms for computing visual correspondence. In
ECCV, pages B:151–158.
Robust Pallet Detection for Automated Logistics Operations
477
