
Benchmarking RGB-D Segmentation: Toy Dataset of Complex Crowded
Scenes
Aleksi Ikkala, Joni Pajarinen and Ville Kyrki
Department of Electrical Engineering and Automation, Aalto University, Espoo, Finland
Keywords:
Object Segmentation, RGB-D Segmentation, Benchmarking, Dataset, Complex Objects, Real World Objects.
Abstract:
In this paper we present a new RGB-D dataset
a
captured with the Kinect sensor. The dataset is composed
of typical children’s toys and contains a total of 449 RGB-D images alongside with their annotated ground
truth images. Compared to existing RBG-D object segmentation datasets, the objects in our proposed dataset
have more complex shapes and less texture. The images are also crowded and thus highly occluded. Three
state-of-the-art segmentation methods are benchmarked using the dataset. These methods attack the problem
of object segmentation from different starting points, providing a comprehensive view on the properties of
the proposed dataset as well as the state-of-the-art performance. The results are mostly satisfactory but there
remains plenty of room for improvement. This novel dataset thus poses the next challenge in the area of
RGB-D object segmentation.
a
Available at http://robosvn.org.aalto.fi/software-and-data.
1 INTRODUCTION
Object segmentation from visual sensor data is one
of the most important tasks in computer vision. Seg-
mentation of RGB-D scenes is especially crucial for
robots handling unknown objects, an application area
of special interest to us. As more efficient segmen-
tation methods have become available, the detection
of simple objects is readily accomplished. These ob-
jects may be, for instance, cereal boxes, coke cans,
or bowls, which embody somewhat elementary ge-
ometrical shapes and easily distinguishable textures.
Benchmarking segmentation algorithms is important
to understand the state-of-the-art performance as well
as open problems, and many useful datasets, includ-
ing the Object Segmentation Database (Richtsfeld
et al., 2012), RGB-D Object Dataset (Lai et al., 2011),
BigBIRD (Singh et al., 2014), and the Willow Garage
Dataset
1
, are available, containing hundreds of such
RGB-D images.
Many of the objects we encounter in our daily
lives are, however, far more complex in terms of their
shape and texture. A good example of such an object
is an ordinary child’s toy, which may or may not re-
semble any simple geometrical shape. Furthermore,
1
Available at http://www.acin.tuwien.ac.at/forschung/
v4r/mitarbeiterprojekte/willow/.
Figure 1: Toys used in the toy-dataset.
the toy may be uni- or multicolored. Our proposed
toy-dataset contains objects like this, often in crowded
scenes and occluded positions, and poses the next
challenge in the area of object segmentation towards
general purpose understanding of complex domestic
environments. The dataset consists of 449 RGB-D
images with human-annotated ground truth.
Three state-of-the-art RGB-D segmentation meth-
ods are benchmarked using the dataset, in order to
explore the dataset’s properties as well as to assess
state-of-the-art capabilities in these kind of scenes.
The methods are provided by the Vision for Robotics
group (V4R) (Richtsfeld et al., 2012), the Image
Component Library (ICL) (Uckermann et al., 2013),
Ikkala, A., Pajarinen, J. and Kyrki, V.
Benchmarking RGB-D Segmentation: Toy Dataset of Complex Crowded Scenes.
DOI: 10.5220/0005675501070116
In Proceedings of the 11th Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2016) - Volume 4: VISAPP, pages 107-116
ISBN: 978-989-758-175-5
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
107

and the Locally Convex Connected Patches (LCCP)
segmenter (Stein et al., 2014) available in Point Cloud
Library (PCL, (Rusu and Cousins, 2011)).
Section 2 puts our contribution in context by re-
viewing existing RGB-D datasets. Section 3 describes
in detail our proposed dataset and some of its char-
acteristics. In Section 4 we discuss briefly how the
three state-of-the-art segmentation methods function,
and also present the experiments and results on the
toy-dataset. In Section 5 the results are analyzed, and
Section 6 states the conclusion.
2 RELATED WORK
Several datasets exist for benchmarking segmentation
algorithms. Most of these previous datasets have con-
centrated on relatively simple objects comprised of
primitive shapes, such as cuboid and spherical shapes,
cylinders and combinations of these.
Among the most popular RGB-D datasets are the
Willow Garage dataset and the OSD (Richtsfeld et al.,
2012), both created with a Kinect v1. The Willow
Garage dataset contains 176 images of household ob-
jects with a little or no occlusion, as well as pixel-
based ground truth annotation. The OSD consists
of similar type of household objects as the Willow
Garage dataset. The OSD contains a total of 111 im-
ages of stacked and occluding objects on a table along
with their pixel-based annotated ground truth images.
Both of the aforementioned datasets include roughly
20-30 objects with relatively simple cylindrical and
cuboidal shapes and diverse texture.
Two popular datasets, the RGB-D Object Dataset
(Lai et al., 2011) and BigBIRD (Singh et al., 2014),
utilize a turntable to obtain RGB-D images of com-
mon household items. In addition, both datasets have
been recorded using two cameras, an RGB-D camera
and a higher resolution RGB camera. The data is gen-
erated by capturing multiple synchronized images of
an object while it spins on the turntable for one revo-
lution.
The RGB-D Object Dataset is one of the most ex-
tensive RGB-D datasets available. It comprises of 300
common household objects and 22 annotated video
sequences of natural scenes. These natural scenes in-
clude common indoor environments, such as office
workspaces and kitchen areas, as well as objects from
the dataset. The dataset was recorded with a proto-
type RGB-D camera manufactured by PrimeSense to-
gether with a higher resolution Point Grey Research
Grasshopper RGB camera. Each object was recorded
with the cameras mounted on three different heights
to obtain views from the objects from different angles.
The BigBIRD dataset provides high quality RGB-
D images along with pose information, segmenta-
tion masks and reconstructed meshes for each ob-
ject. Each one of the dataset’s 125 objects has been
recorded using PrimeSense Carmine 1.08 depth sen-
sors and high resolution Canon Rebel T3 cameras.
The objects in the RGB-D Object Dataset and Big-
BIRD dataset are, however, mainly similar to the ge-
ometrically simple objects in the Willow Garage and
OSD datasets. In addition, apart from the video se-
quences of the RGB-D Object Dataset, the images do
not contain occlusion.
The datasets provided by Hinterstoisser et al.
(Hinterstoisser et al., 2012) and Mian et al. (Mian
et al., 2006; Mian et al., 2010) contain more compli-
cated objects than the previously mentioned datasets.
The dataset of Hinterstoisser et al. consists of 15
different texture-less objects on a heavily cluttered
background and with some occlusion. The dataset
includes video sequences of the scenes, and a total
of 18,000 Kinect v1 images along with ground truth
poses for the objects. As this dataset is more aimed
for object recognition and pose estimation, it does not
include pixel-based annotation of the objects. The
dataset proposed by Mian et al. comprises of five
complicated toy-like objects with occlusion and clut-
ter. The 50 depth-only images have been created us-
ing a Minolta Vivid 910 scanner to get a 2.5D view of
the scene. The dataset includes also pose information
for the objects and pixel-based annotated ground truth
images.
As opposed to the completely textureless and uni-
colored objects in the dataset by Hinterstoisser et al.,
the objects in our dataset retain some texture and
many are also multicolored. Also, the dataset by Mian
et al. contains only depth data, and is considerably
smaller than our proposed dataset.
Multiple RGB-D datasets have been gathered
from the real world as well. For instance, the video
sequences of the RGB-D Object Dataset, Cornell-
RGBD-Dataset (Anand et al., 2011; Koppula et al.,
2011) and NYU Dataset v1 (Silberman and Fergus,
2011) and v2 (Silberman et al., 2012) contain al-
together hundreds of indoor scene video sequences,
where the three latter datasets were captured with
Kinect v1. These sequences are recorded in typi-
cal home and office scenes, such as bedrooms, liv-
ing rooms, kitchens and office spaces. The images
are highly cluttered, and all the scenes in Cornell-
RGBD-Dataset are labeled, and a subset of the im-
ages in NYU Datasets contain labeled ground truths.
However, these scenes involve generally larger ob-
jects, such as tables, chairs, desks and sofas, which
are not the kind of objects a lightweight robot typi-
VISAPP 2016 - International Conference on Computer Vision Theory and Applications
108

cally manipulates.
3 TOY-DATASET
Our proposed dataset is comprised of complex objects
and annotated ground truth images. The dataset con-
tains objects which one would expect a robot to ma-
nipulate, that is, small, lightweight, and complex ob-
jects that one encounters in day-to-day life.
The objects that were chosen into the dataset rep-
resented typical children’s toys. In other words, the
objects were generally multicolored, had a little or no
texture and were of varied shapes. The objects were
placed randomly on the tabletop; the only criteria was
that they are close to one another, so that a consider-
able amount of occlusion is present.
First, we describe in detail how the dataset was
acquired and how the ground truth images were anno-
tated. Secondly, we contrast the proposed dataset to
OSD by comparing the F-scores of V4R’s features on
toy-dataset to the F-scores on OSD, and use them to
describe some of the characteristics of the toy-dataset
compared to OSD.
3.1 Set-up
The dataset consists of 449 RGB-D images and cor-
responding annotated ground truth images. The dis-
tance between the Kinect and the closer edge of the
table, the further edge of the table, and the center of
the table are roughly 85, 150, and 115 centimeters,
respectively. There are 24 toys in the dataset in to-
tal, and, compared to the toys in the OSD, many of
the toys are smaller in size. Most toys are multicol-
ored and contain only minute texture. The number of
toys per image varies according to Table 1. There are
plenty of images with only a few toys to make sure
model-based methods, such as V4R’s segmenter, are
able to learn the correct relations of an object and be-
tween objects. The complete set of toys used in this
dataset can be seen in Figure 1.
Table 1: The number of toys per image varies according to
the index number of the images. The column on the left in-
dicates the index number of an image, while the column on
the right indicates the number of toys in the corresponding
image.
# image # toys
0 – 228 2 – 4
229 – 338 6 – 7
339 – 448 14 – 18
The ground truth images were annotated manu-
ally. The pixels belonging to each object were col-
ored with a different grayscale value, while the back-
ground has a value of zero. The pixels are not anno-
tated impeccably, since the edges of objects are not
strictly one pixel wide but instead can span several
pixels. Additionally, the edges of the objects are not
always visible, because of, for example, the lighting
of the image. Moreover, since the objects are highly
occluded in most images, in some occasions it is ex-
tremely difficult to distinguish which aggregation of
pixels belongs to which object.
Furthermore, we filtered the point clouds such that
only the table and the objects remained. These fil-
tered images are then used in our experiments, as ex-
plained in Section 4. The filtering is easy to imple-
ment since the planar tabletop can be easily and ro-
bustly detected. The toy-dataset contains both the fil-
tered and the original RGB-D images.
3.2 Characteristics
The discrimination capability of a feature can be eval-
uated by computing an F-score for the feature (Chen
and Lin, 2006). F-score measures the discrimination
of two sets of real numbers and it is often used for fea-
ture selection. A higher F-score indicates that a fea-
ture is more likely to be discriminative, but unfortu-
nately it does not reveal mutual information amongst
several features. Nevertheless, the F-score measure
is widely used in the machine learning literature due
to its simplicity. The F-score is defined in Equation
(1): r
k
, k = 1, . . . , m, are the training vectors, n
+
and
n
−
are the number of positive and negative instances,
respectively. Further, ¯r
i
, ¯r
(+)
i
and ¯r
(−)
i
are the aver-
age of the i
th
feature of the whole, positive and neg-
ative datasets, respectively, and r
(+)
k,i
and r
(−)
k,i
are the
i
th
features of the k
th
positive and negative instances,
respectively.
We exploit the F-score and V4R’s features (as pre-
sented in (Richtsfeld et al., 2014)) in order to explore
the characteristics of our dataset. These F-scores are
then compared to those of OSD, as given in (Richts-
feld et al., 2014). OSD is also a suitable comparison
dataset as it is similar to our dataset in the sense of
how the images are obtained and how the objects are
placed. The datasets differ critically in the objects that
are used, the objects in toy-dataset having more com-
plex shapes and less texture; also, the images in our
dataset have more occlusion.
The comprehensive set of features chosen by V4R
contains commonly used features in computer vi-
sion. They measure relevant aspects of objects in
the dataset, such as texture and color information.
Benchmarking RGB-D Segmentation: Toy Dataset of Complex Crowded Scenes
109

F(i) =
¯r
(+)
i
− ¯r
i
2
+
¯r
(−)
i
− ¯r
i
2
1
n
+
−1
∑
n
+
k=1
r
(+)
k,i
− ¯r
(+)
i
2
+
1
n
−
−1
∑
n
−
k=1
r
(−)
k,i
− ¯r
(−)
i
2
(1)
This makes the V4R features suitable for compar-
ing the characteristics of these two datasets. This
same analysis could have been carried out using any
other dataset, since the procedure is easy to imple-
ment. Furthermore, the analysis is beneficial as it
gives quantitative results.
Figure 2 displays the F-scores for structural and
assembly level features for both the OSD and toy-
dataset. Structural features capture information such
as texture and color while assembly level features
capture higher level information such as distance be-
tween presegmented patches and angle between sur-
face normals of the patches. These are explained in
more detail in Section 4.1. The figure shows that
structural level features are generally smaller in the
toy-dataset than in the OSD. Most notable discrep-
ancy takes place in the r
co3
feature, which measures
the color similarity on the border of two patches.
Many of the toys are multicolored, and as the V4R’s
presegmenter does not use color information in creat-
ing the patches, the patches and their borders are typ-
rco rtr rga rfo rrs rco3 rcu3 rdi2 rvd2 rcv3
0.001
0.01
0.1
1
10
Feature
F−score
TDS
OSD
(a)
rco rtr rga rfo rrs rmd rnm rnv rac rdn rcs roc ras rls rlg
1e−10
1e−08
1e−06
0.0001
0.01
1
100
Feature
F−score
TDS
OSD
(b)
Figure 2: F-scores for both the OSD and the toy-dataset,
labeled as TDS in the figures. (a) Structural level features.
(b) Assembly level features.
ically of different colors. Also noise around the ob-
jects’ edges might shift the real border of the objects
to the area of another object, placing incorrect infor-
mation into the feature. Despite this, the border col-
ors alone seldom convey much information whether
or not the patches belong to the same object. Addi-
tionally, the differences are remarkably high in the r
tr
,
r
ga
and r
f o
features, which principally measure the
disparity between patch textures. Generally the ob-
jects in the toy-dataset have less texture than objects
in other datasets, including the OSD, which explains
the low F-scores of these features.
Many of the F-scores of assembly level features
are roughly the same in the toy-dataset and OSD. The
feature r
nm
makes an exception and is significantly
smaller in the toy-dataset. This feature measures the
angle between surfaces’ mean normals. As the shapes
of the objects in toy-dataset are more varied than in
the OSD, it is more difficult to determine whether the
angle between normals of a patch-pair is relevant or
not.
Moreover, the six rightmost assembly features in
the figure, as well as r
md
, are clearly higher in the toy-
dataset. The r
md
feature corresponds to the minimum
distance between two patches and is an especially use-
ful feature, as usually even a relatively short distance
between two patches indicates that they do not belong
to the same object. Many of the objects in the toy-
dataset are smaller than the objects in OSD, which
might explain the higher discriminative capability of
this feature. The r
dn
feature corresponds to the mean
distance in normal direction of boundary points, and
the five rightmost features correspond to boundary re-
lations between the surfaces of the patches.
It is trivial to show that the F-score depends
quadratically on the prior probability of connected
patches. The prior probability is the ratio of con-
nected patch pairs (that is, patch pairs that belong to
the same object) to the number of unconnected patch
pairs (patch pairs that do not belong to the same ob-
ject) in the training set. In other words, the prior prob-
ability tells us how likely it is that a patch pair belongs
to the same object before seeing the actual features.
The quadratic dependency could, at most, induce a
difference in the F-scores by a factor of two when the
priors of the datasets are near 0.5 compared to near
zero or one. However, the prior probabilities for both
structural and assembly levels are nearly the same for
both datasets: For structural level the prior is 0.6019
in OSD and 0.4978 in toy-dataset, and for assembly
VISAPP 2016 - International Conference on Computer Vision Theory and Applications
110

level the prior is 0.02919 in OSD and 0.03433 in toy-
dataset. Thus the differences in the priors do not ex-
plain the differences in F-scores between the OSD and
toy-dataset.
Since V4R’s features utilize, for instance, the
border and texture information of the presegmented
patches, the F-scores presented in Figure 2 explicitly
demonstrates the difference between the objects in the
OSD and toy-dataset. For example, the edges of the
objects are much sharper in the OSD, while the toys in
our dataset contain softer edges, which affects all fea-
tures that use the edge information of these objects.
As a lower F-score implies that a feature is less ca-
pable to discriminate between two classes, it seems
that it is more difficult to segment the toy-dataset us-
ing structural level features. However, as the F-score
does not account for the joint activity of several fea-
tures, this speculation is not decisive. Also, some of
the F-scores in the assembly level features are higher
in the toy-dataset, which yields further confusion con-
cerning the outcome of this speculation.
4 METHODS, EXPERIMENTS
AND RESULTS
The segmentation methods can be divided into model-
based and model-free approaches. Model-based ap-
proaches require an additional training phase, where
the segmenter is trained to identify specific features
from the data. Generally the training of the segmenter
is achieved using a training set of RGB-D images and
corresponding ground truth data. Model-free meth-
ods, on the other hand, do not require this additional
training phase, and they rely on identifying objects’
common features, for instance, convexity in the case
of LCCP. However, this means that the model-free
methods rely on an implicit model of the objects. If
the assumed implicit model of the objects is wrong,
the segmenter will perform poorly, whereas a model-
based method may be able to adapt to the objects in
the training phase.
While model-based methods can in general learn
to segment or detect more complex objects, the
model-free methods are typically faster. One of the
segmenters we apply on the toy-dataset is model-
based, namely the V4R segmenter, while the two oth-
ers are model-free.
4.1 V4R
The segmentation pipeline in V4R’s method (Richts-
feld et al., 2012) is as follows: First, two support vec-
tor machines (SVM, (Burges, 1998)) are trained us-
ing a training set of RGB-D images and correspond-
ing ground truth images. Secondly, these SVMs and
a graph cut are used to find an optimal segmentation
on an input image given to the segmenter.
The images in the training set contain one or more
objects, and they may be in any position or occluded.
Each image is then presegmented in order to obtain
an oversegmented set of patches. Next a relation vec-
tor is computed for each patch pair. The computed
features differ for the two SVMs: the neighborhood
relation of the patch pair determines which set of fea-
tures is computed. If the patches are neighbors, that
is, they share a border in the 2D image and are close
enough to each other in 3D space, features such as
patch texture, color and features concerning the bor-
der pixels are computed. Otherwise the patches are
not considered neighbors, and another set of features
– such as minimum distance between patches, angle
between surface normals, collinearity continuity – is
computed. Once all the relations between patch pairs
are gathered, the SVMs are trained using the freely
available LIBSVM package (Chang and Lin, 2011).
More specifically, relations concerning neighboring
patches (Richtsfeld et al. use the term structural level
when referring to these) are used to train one of the
SVMs, and the relations of non-neighboring patches
(assembly level) are used to train the other SVM.
After the training is complete, any RGB-D image
can be fed into the segmenter. The SVMs provide
a probability for each patch pair, which tells us how
likely it is that the patches belong to the same object.
Afterwards a graph cut is utilized to choose the opti-
mal segmentation on global level.
This Gestalt-inspired segmenter of Richtsfeld et
al. manages to segment nearly perfectly the objects
in the OSD, as explained in (Richtsfeld et al., 2014).
However, the training phase of the segmenter is quite
laborious, since the ground truth images need to be
generated by hand. Furthermore, the computation of
relation vectors for patch pairs is compute-intensive,
especially if there are large numbers of presegmented
patches in the training images.
4.2 ICL
Another high-performance approach is the segmenter
developed by Uckermann et al. (Uckermann et al.,
2013), which is available in the Image Component Li-
brary
2
. Their model-free segmentation method runs
in realtime and provides comparable results with the
V4R segmenter in the OSD. The method successfully
handles unknown, stacked, and nearby objects, given
2
Website http://www.iclcv.org/
Benchmarking RGB-D Segmentation: Toy Dataset of Complex Crowded Scenes
111

they are relatively simple objects comprised of, for
example, boxes, cylinders and bowls.
Their method can be split into two main parts.
First the algorithm determines surface patches and ob-
ject edges from the raw depth images using connected
component analysis. Afterwards these low-level seg-
ments, the surface patches, are combined into sensible
object hypotheses using a weighted graph describing
the patches’ adjacency, coplanarity, and curvature re-
lations. Finally a graph cut algorithm is deployed to
achieve likely object hypotheses.
However, as (Uckermann et al., 2013) mentions,
this model-free method has its limitations compared
to model-based approaches, especially in segmenting
highly complex object shapes.
4.3 LCCP
The third state-of-the-art method is the LCCP by
Stein et al. (Stein et al., 2014), available in the Point
Cloud Library
3
. This model-free method is extremely
simple while still providing nearly as good results as
V4R on, for instance, the OSD. It should be also noted
that the actual goal of Stein et al. is to partition com-
plex objects into parts, not to segment complete ob-
jects.
The motivation for their algorithm stems from
psychophysical studies, where it has been shown that
the transition between convex and concave image
parts might indicate separation between objects or
their parts. The algorithm first decomposes the im-
age into an adjacency-graph of surface patches based
on a voxel grid. Edges in the graph are then classified
as either convex or concave using convexity and san-
ity criteria which operate on the local geometry of the
patches. This leads into a division of the graph into
locally convex connected subgraphs which represent
object parts.
All three methods described above have been
proven to work extremely well with relatively simple
objects. As the approach used by Richtsfeld et al. re-
lies on training the algorithm with ground truth data,
it learns to recognize more complex objects, provided
the training data is extensive enough. The method by
Uckermann et al. on the other hand is model-free and
relies on straightforward measurements of similarity,
so it cannot present complex object hypotheses. And,
likewise, the simple and model-free method of Stein
et al. is designed to extract object parts, and thus may
not be able to segment the complete objects in our
toy-database.
These methods take on the problem of segmenta-
tion from different starting points, and represent the
3
Website http://pointclouds.org/
state-of-the-art in the area of RGB-D object segmen-
tation. We use these methods to assess the difficulty
and quality of our proposed toy-dataset.
4.4 Modifications
Only minor parameter changes were applied to the
segmenters. V4R’s original parameter values caused
severe undersegmentation on the toy-dataset in the
presegmentation phase. Thus one of the original pa-
rameters was tweaked to prevent the undersegmenta-
tion: the value of epsilon c was changed from 0.58 to
0.38. The new value was chosen by hand such that the
number of patches – and consequently feature vectors
– was as low as possible, while still retaining overseg-
mentation. It is important that the presegmented im-
ages are oversegmented, so that the patches include
only parts of one object. This allows the SVMs to
learn correct relations between the patches. Nonethe-
less, a low number of presegmented patches is pre-
ferred, since a higher number of patches means a
higher number of feature vectors, which slows down
the training of the SVMs.
V4R’s support vector machines use 10 and 15 fea-
tures for the structural and assembly level, as ex-
plained in (Richtsfeld et al., 2014). For the struc-
tural level SVM there were 8 226 feature vectors ex-
tracted from the training set. All these vectors were
used to train the structural level SVM. For the assem-
bly level SVM there were 171 768 feature vectors ex-
tracted from the training set. The training of the SVM
would take days if we used all these feature vectors,
which is not acceptable for practical reasons. There-
fore we randomly sampled a set of 15 000 feature vec-
tors which were used in the training.
In the ICL’s segmenter the parameters were orig-
inally adjusted for QVGA resolution, so we had to
modify the parameters slightly to account for Kinect’s
VGA resolution. For the LCCP segmenter we hand-
picked parameter values -sc = 20 and -ct = 20 to avoid
excessive over-segmentation.
4.5 Experiments and Results
We compared the performance of the three seg-
menters by applying them on a set of RGB-D images
from our dataset.
The toy-dataset was divided into training and test
sets, although only V4R’s segmenter needs to be
trained. The training set was formed by choosing ran-
domly 200 images, and thus 249 images remained in
the test set. One of the test set images (image num-
ber 296) was discarded due to an unsolved bug within
the V4R segmenter, which made the segmenter crash
VISAPP 2016 - International Conference on Computer Vision Theory and Applications
112
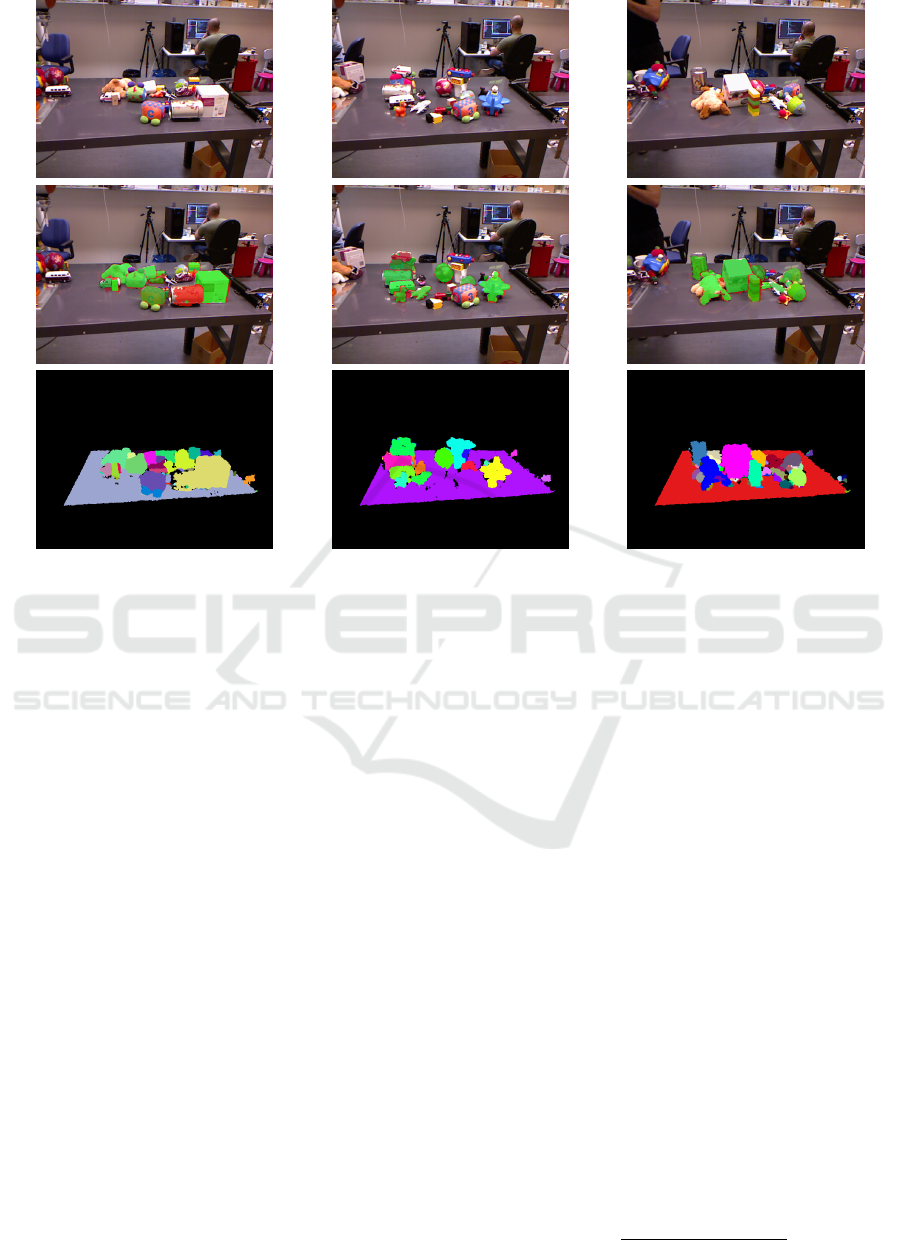
(a) V4R (b) ICL (c) LCCP
Figure 3: Three example images from the toy-dataset. The upper row presents the original images. The second row displays
the result for an image by V4R, ICL and LCCP, respectively, when the true positive pixels are colored with transparent green,
and the false positive pixels are colored with transparent red. The lowest row displays the actual results from the segmenters,
where a color corresponds to a segmented object.
when processing the image. Hence, ultimately there
were 248 images in the test set and 200 images in the
training set.
We went through all images in the test set using
each of the three segmenters, and received segmented
images. From the segmented images we compute the
amount of correctly segmented pixels, as well as the
amount of incorrectly segmented pixels, and use these
to compute the true positive rate and false positive
pixel rates for each image. After we have acquired
the true and false positive rates for each image, we
take their average and 95 % confidence interval using
bootstrapping.
We follow roughly the same procedure for com-
puting the results as (Uckermann et al., 2013) uses.
Their method differs in the way the average of true
and false positive pixels is computed for one image.
Uckermann et al. compute the true positive and false
positive rates for each object in an image, and then
average across the objects. We, on the other hand, use
all true and false positive pixels, irrespective of which
object they belong to, to compute the average true and
false positive rate for an image. This way a failed seg-
mentation of a small object will not affect the results
as much as compared to the way Uckermann et al.
compute the results.
A segmenter divides an image into objects by la-
beling pixels in the image (see Figure 3 lowest row
for an illustration). To count the number of correct
and incorrect pixel labelings, the evaluation procedure
first assigns to each ground truth object a pixel label
according to the following rules: 1) assign most fre-
quent label X to the object, 2) over half of the pixels
with label X must reside on the annotated object. For
some objects, there may be no pixel labels which sat-
isfy both 1) and 2). Figure 5 shows an example of how
segmentations are assigned to ground truth objects.
True positive pixels are pixels that have been as-
signed to an object and coincide with the annotated
pixels of said object in the ground truth image. False
positive pixels are pixels that have been assigned to
an object, but do not coincide with the annotated pix-
els. See Figure 3 middle and lowest row for a visual
presentation of the true and false positive pixels. The
true positive rate t p for one object is then computed
as
t p =
|S
assigned
∩ S
annotated
|
|S
annotated
|
, (2)
Benchmarking RGB-D Segmentation: Toy Dataset of Complex Crowded Scenes
113

Table 2: True positive rate (tp) and false positive rate (fp) for each method. The best results, highest true positive rates and
lowest false positive rates, are bolded. In ”V4R one SVM” we have used only structural level SVM, and in ”V4R two SVMs”
we have used structural+assembly level SVMs, similarly as in (Richtsfeld et al., 2014).
tp fp
mean 95% confidence interval mean 95% confidence interval
V4R one SVM 0.6766 (0.6510, 0.7017) 0.1979 (0.1840, 0.2126)
V4R two SVMs 0.6556 (0.6286, 0.6816) 0.2065 (0.1924, 0.2220)
LCCP 0.6723 (0.6489, 0.6948) 0.1635 (0.1528, 0.1756)
ICL 0.5999 (0.5717, 0.6277) 0.2383 (0.2220, 0.2561)
2−4 toys 6−7 toys 14−18 toys
0.5
0.55
0.6
0.65
0.7
0.75
0.8
True positive rate
V4R−1SVM
V4R−2SVM
LCCP
ICL
(a) True positive rates
2−4 toys 6−7 toys 14−18 toys
0.1
0.15
0.2
0.25
0.3
False positive rate
(b) False positive rates
Figure 4: Results for different number of toys in test set
images, partitioned as in Table 1. The test set contained
126 images with 2-4 toys, 59 images with 6-7 toys and 63
images with 14-18 toys.
where S
assigned
is the set of pixels assigned to a given
object, and S
annotated
is the set of annotated pixels in
the ground truth image for that object. Hence, the true
positive rate for one object is the number of true posi-
tive pixels divided by the number of annotated pixels.
Likewise, the false positive rate f p for one object is
f p =
|S
assigned
\S
annotated
|
|S
assigned
|
. (3)
The false positive rate is the ratio of assigned pixels
that do not coincide with the annotated pixels to the
number of assigned pixels in total.
Table 2 shows the results for each method when
the whole test set is used. From the results we see
that V4R’s segmenter and LCCP have the highest true
(a)
(b)
(c)
Figure 5: Example of a segmentation with two objects. (a)
shows the segmentation where each color corresponds to a
segmented object. The ground truth image (b) shows the
actual pixel labels. (c) shows the evaluation where transpar-
ent green highlights true positives and transparent red false
positives. In (a), several segmented objects overlap the ac-
tual object on the left. The evaluation procedure assigns the
segmented object with the most overlapping pixels to the
actual object: for the left object the object segmented with
dark green in (a).
positive rates on the test set, while LCCP has a lower
false positive rate than V4R. Figure 4 displays results
for each segmenter when we have divided the test set
into partitions according to how many toys there are in
the images. The confidence intervals are the longest
in the set with 2-4 toys, because the impact of incor-
rectly segmenting objects is larger. For instance, if a
segmenter fails to segment both of two objects, the re-
sulting true positive rate for that image will be zero.
Then, if there are, say, 18 objects in an image and
the segmenter fails to segment 2 of those objects, the
true positive rate is still significantly higher than zero.
This leads to higher variance in the results of images
with less toys, and hence longer confidence intervals.
5 DISCUSSION
As expected, ICL did not fare well with the dataset’s
complex toys. What is surprising, however, is that
LCCP and V4R did equally well in the true positive
rate, and LCCP had significantly lower false positive
rate than V4R. The low false positive rate is due to
comprehensive oversegmentation in the LCCP’s pre-
segmentation phase, which results in multiple non-
connected patches in some of the objects. This pre-
VISAPP 2016 - International Conference on Computer Vision Theory and Applications
114

vents the occurrence of false positives, as the seg-
mented pixels are always in the area of the annotated
ground truth pixels. However, it also lowers the true
positive rate since these patches are not connected to
the patch that is assigned to the object.
By examining the segmented images by each
method, we made a few observations. ICL failed
many of the objects completely by segmenting them
as part of the table, which reduces the true positive
rate significantly. This happened to other methods as
well, though not so frequently. Furthermore, all the
methods often incorrectly joined two or three objects
together, which explains the high false positive rates.
Figure 3 demonstrates some of the aforementioned
observations for three different images from the toy-
dataset.
ICL’s poor results might originate from their
weighted similarity graph, which considers the ad-
jacency, curvature and coplanarity of found surface
patches. Out of these three attributes especially the
curvature and coplanarity incur problems, since many
of the presegmented surface patches are not symmet-
rical or similar. In other words, the shapes of the
patches differ from each other and they are not copla-
nar.
Table 2 contains results for V4R with one and two
SVMs, or structural and structural+assembly level
SVMs, as Richtsfeld et al. also used both methods on
OSD in their paper (Richtsfeld et al., 2014). It is not
obvious which method, one or two SVMs, performs
better in the OSD, for when using only one SVM the
precision is higher but recall is lower as opposed to
using two SVMs. In our dataset, however, using only
one SVM, the structural level SVM, seems to be a
preferred choice.
As we discussed in the beginning of Section 4,
a model-free method will perform poorly if its im-
plicit model of the objects is wrong. In this case it
seems that the implicit model of the convexity-based
LCCP is more appropriate to the toy-dataset than the
implicit model of ICL. It is also noteworthy that ICL
and V4R received similar results in the OSD, whereas
here V4R was more efficient than ICL. It seems that
the implicit model of ICL is better suited to the kind
of objects found in OSD than the objects in the toy-
dataset.
In any event, there are some sources of errors that
affect the computed results. When viewing the point
clouds of the images, it is apparent that the RGB
and depth images are not completely aligned at some
places. Since the ground truth images are created
from the RGB images, the misalignment implies that
the segmented pixels cannot coincide with annotated
pixels of an object. This basically shifts some of true
positive pixels into false positive pixels, reducing the
true positive rate and increasing the false positive rate.
Also, there is often noise around the edges of the ob-
jects, which affects the true and false positive rates,
and further, there exists the already mentioned dif-
ficulties (Section 3.1) with annotation of the ground
truth images.
Regardless, the slight misalignment of color and
depth images, as well as the noisy observations of
the objects, reflect the commonplace problems of
a robot operating in the real world. Accordingly,
our dataset corresponds to real circumstances under
which a robot usually operates, along with the non-
ideal lighting conditions and a relatively poor quality
RGB-D sensor.
6 CONCLUSION
In this paper we presented a novel RGB-D dataset de-
signed for shifting the focus from relatively simple
objects to more complicated ones in the object seg-
mentation scene. The dataset contains 449 highly oc-
cluded images of 24 toys, which vary greatly in shape,
color and size, and contain minute texture.
Also, the toy-dataset provides a new benchmark
against which forthcoming segmenters can test their
performance. Our experiments demonstrated that the
V4R and LCCP segmenters performed equally well
on our dataset of toys, even though the model-based
V4R was trained using data from the toy-dataset. It
seems that the features used by V4R might need some
alteration to account for the complex objects in our
dataset. Furthermore, the actual goal of the LCCP
segmenter is to partition complex objects into parts,
which generates oversegmentation. This oversegmen-
tation however has both an upside and a downside, as
it lowers both false and true positive rates. Lastly, the
ICL segmenter seems to perform better on symmetri-
cal objects, such as boxes, bowls and cylinders found
in the OSD, but the asymmetric objects in our dataset
deteriotate the performance of the segmenter.
ACKNOWLEDGEMENTS
This work was supported by Academy of Finland, de-
cisions 264239 and 271394.
REFERENCES
Anand, A., Koppula, H. S., Joachims, T., and Saxena, A.
(2011). Contextually guided semantic labeling and
Benchmarking RGB-D Segmentation: Toy Dataset of Complex Crowded Scenes
115

search for 3D point clouds. International Journal of
Robotics Research, abs/1111.5358.
Burges, C. (1998). A tutorial on support vector machines
for pattern recognition. Data Mining and Knowledge
Discovery, 2(2):121–167.
Chang, C.-C. and Lin, C.-J. (2011). LIBSVM: A library
for support vector machines. ACM Transactions on
Intelligent Systems and Technology, 2(3):1–27.
Chen, Y.-W. and Lin, C.-J. (2006). Combining SVMs
with various feature selection strategies. In Feature
Extraction, volume 207 of Studies in Fuzziness and
Soft Computing, chapter 13, pages 315–324. Springer
Berlin Heidelberg.
Hinterstoisser, S., Lepetit, V., Ilic, S., Holzer, S., Brad-
ski, G. R., Konolige, K., and Navab, N. (2012).
Model based training, detection and pose estimation
of texture-less 3D objects in heavily cluttered scenes.
In Proceedings of the Asian Conference on Computer
Vision (ACCV), pages 548–562. Springer.
Koppula, H. S., Anand, A., Joachims, T., and Saxena, A.
(2011). Semantic labeling of 3D point clouds for in-
door scenes. In Advances in Neural Information Pro-
cessing Systems, pages 244–252. Curran Associates,
Inc.
Lai, K., Bo, L., Ren, X., and Fox, D. (2011). A large-scale
hierarchical multi-view RGB-D object dataset. In
Proceedings of the IEEE International Conference on
Robotics and Automation (ICRA), pages 1817–1824.
IEEE.
Mian, A., Bennamoun, M., and Owens, R. (2006). Three-
dimensional model-based object recognition and seg-
mentation in cluttered scenes. IEEE Transac-
tions on Pattern Analysis and Machine Intelligence,
28(10):1584–1601.
Mian, A., Bennamoun, M., and Owens, R. (2010). On the
repeatability and quality of keypoints for local feature-
based 3D object retrieval from cluttered scenes. In-
ternational Journal of Computer Vision, 89(2-3):348–
361.
Richtsfeld, A., M
¨
orwald, T., Prankl, J., Zillich, M., and
Vincze, M. (2012). Segmentation of unknown ob-
jects in indoor environments. In Proceedings of
the IEEE/RSJ International Conference on Intelligent
Robots and Systems (IROS), pages 4791–4796. IEEE.
Richtsfeld, A., M
¨
orwald, T., Prankl, J., Zillich, M., and
Vincze, M. (2014). Learning of perceptual group-
ing for object segmentation on RGB-D data. Journal
of Visual Communication and Image Representation,
25(1):64 – 73.
Rusu, R. B. and Cousins, S. (2011). 3D is here: Point
cloud library (PCL). In Proceedings of the IEEE In-
ternational Conference on Robotics and Automation
(ICRA), pages 1–4. IEEE.
Silberman, N. and Fergus, R. (2011). Indoor scene segmen-
tation using a structured light sensor. In Proceedings
of the IEEE International Conference on Computer
Vision (ICCV) Workshops, pages 601–608. IEEE.
Silberman, N., Hoiem, D., Kohli, P., and Fergus, R.
(2012). Indoor segmentation and support inference
from RGBD images. In Proceedings of the 12th Euro-
pean Conference on Computer Vision (ECCV), pages
746–760. Springer-Verlag.
Singh, A., Sha, J., Narayan, K. S., Achim, T., and Abbeel,
P. (2014). BigBIRD: A large-scale 3D database of
object instances. In Proceedings of the IEEE In-
ternational Conference on Robotics and Automation
(ICRA), pages 509–516. IEEE.
Stein, S., Schoeler, M., Papon, J., and Worgotter, F. (2014).
Object partitioning using local convexity. In Proceed-
ings of the IEEE Conference on Computer Vision and
Pattern Recognition (CVPR), pages 304–311. IEEE.
Uckermann, A., Haschke, R., and Ritter, H. (2013). Re-
altime 3D segmentation for human-robot interaction.
In Proceedings of the IEEE/RSJ International Confer-
ence on Intelligent Robots and Systems (IROS), pages
2136–2143. IEEE.
VISAPP 2016 - International Conference on Computer Vision Theory and Applications
116
