
Fast Screen Space Curvature Estimation on GPU
Martin Prantl, Libor V
´
a
ˇ
sa and Ivana Kolingerov
´
a
University of West Bohemia, Plzen, Czech Republic
Keywords:
Curvature, Screen Space, GPU, Visualisation, Discrete Differential Geometry, Computer Graphics.
Abstract:
Curvature is an important geometric property in computer graphics that provides information about the be-
havior of object surfaces. The exact curvature can only be calculated for a limited set of surfaces description.
Most of the time, we deal with triangles, point sets or some other discrete representation of the surface. For
those, curvature computation is problematic. Moreover, most of existing algorithms were developed for static
geometry and can be slow for interactive modeling. This paper proposes a screen space method which es-
timates the mean and Gaussian curvature at interactive rates. The algorithm uses positions and normals to
estimate the curvature from the second fundamental form matrix. Using the screen space has advantages over
the classical approach: low-poly geometry can be used and additional detail can be added with normal and
bump maps. The screen space curvature can be easily added to existing rendering pipelines. The proposed
algorithm was tested on several models and it outperforms current state-of-the-art GPU approaches.
1 INTRODUCTION
Visualization of curvature plays an important role in
computer graphics. It can help to better understand
properties of surfaces and their convex and concave
areas. In computer graphics, the basic representation
of geometry is a triangle mesh. It represents only an
approximation of the original geometry and the same
triangle mesh can be obtained for different geome-
tries. Therefore it is only possible to compute an es-
timation of the curvature of the original smooth sur-
face. For triangle meshes, curvature equals to zero
inside triangles, zero or infinity on edges and infin-
ity in vertices. To estimate curvature for a triangle
mesh, various algorithms were proposed, using tri-
angle neighbors and approximations to perform the
estimation. The more triangles a model has, the bet-
ter approximation can we get, but the calculation be-
comes slower. The exact curvature computation can-
not be done for volumetric data sets, height fields,
point clouds and other discrete representations either.
The curvature approximation can be computation-
ally expensive, especially if the input data are of high
quality (many triangles, high volume resolution, large
point clouds etc.). A recalculation at each frame dur-
ing interactive data changes can substantially slow the
processing down. Existing methods are mostly used
for static geometry and their real-time variants mostly
rely on parallelization using GPU.
In the proposed approach, to mitigate this prob-
lem, the curvature is not estimated directly from the
mesh, but rather from the final rendered image in
screen space. Only the currently visible data inter-
esting for the viewer are processed. Calculations are
independent of the triangle count of the original ge-
ometry, the only limitation is the screen resolution.
The advantage is that the curvature can be calculated
from any possible model representation with the same
algorithm. There is no limitation to triangle meshes,
the final scene can contain volumetric models, im-
plicit surfaces, procedurally generated geometry and
other screen space generated effects, such as a water
surface.
Screen space techniques can be easily added as
post-process methods or replace an existing rendering
output. Nowadays, these methods are quite popular
for many problems, such as water rendering, lighting,
ambient occlusion and reflections. In screen space,
however, some problems may occur, usually on object
edges, where pixel flickering may appear. Another
disadvantage stems directly from the screen space it-
self, where the geometry outside the visible area can-
not contribute to the results.
The proposed screen space algorithm is designed
to be used as the first and fast estimation of the curva-
ture. For a more precise solution, the curvature should
be approximated directly from the underlying models,
where connectivity of the triangles can be used to im-
Prantl, M., Váša, L. and Kolingerová, I.
Fast Screen Space Curvature Estimation on GPU.
DOI: 10.5220/0005676801490158
In Proceedings of the 11th Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2016) - Volume 1: GRAPP, pages 151-160
ISBN: 978-989-758-175-5
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
151

Figure 1: Tangent vectors of surface at point P.
prove the results quality.
Contributions of the proposed solution are:
• it overcomes problems with the interactivity for
a high number of triangles by approximating the
curvature directly in screen space,
• it can be used in screen space as well as in object
space with little or no modification,
• it fits directly into existing rendering pipelines and
uses only the usual outputs from deferred render-
ers (positions, normals).
The rest of this paper is organized as follows. Section
2 covers related work. Section 3 explains the pro-
posed solution in object and screen space. Section 4
presents the algorithm results. Section 5 concludes
the paper. Notation used in the article is as follows:
symbol “·” denotes the dot product, “×” denotes the
cross product, |x| is the vector length and det(X) is
the determinant of a matrix X.
2 BACKGROUND AND RELATED
WORK
2.1 Basic Theory
Only a brief introduction to curvature will be pre-
sented. For more details and proofs of theorems, we
refer the reader to (Gray, 1997).
The important surface descriptors are the funda-
mental forms. They describe the first and second or-
der derivatives of a parameterization of the surface at
a given point of the surface.
The first fundamental form (I) is constructed from
the first order derivatives at a surface point, which
give us two tangent vectors (T
u
, T
v
), see Figure 1. Vec-
tors T
u
, T
v
are in general not orthogonal. They are,
however, orthogonal to the normal vector n to the sur-
face at the given point. Elements of the matrix I are
computed as
I=
E F
F G
,
E = T
u
·T
u
, F = T
u
·T
v
, G = T
v
·T
v
.
(1)
The second fundamental form (II) is calculated
from the second partial derivatives (T
uu
, T
vv
, T
uv
) and
the normal vector (n). The elements of the matrix II
are computed as
II =
L M
M N
,
n =
T
u
×T
v
|T
u
×T
v
|
,
L = T
uu
·n, M = T
uv
·n, N = T
vv
·n.
(2)
Combining the fundamental forms gives the shape
operator W (also known as the Weingarten operator).
For every point of the surface, it tells us the change
of the normalized normal vector in the direction of a
tangent vector at this point. W is a 2 ×2 symmetric
matrix that can be obtained from the first (I) and sec-
ond (II) fundamental forms:
W = I
−1
II.
(3)
The matrix W has two real eigenvalues that corre-
spond to the first (λ
1
) and second (λ
2
) principal curva-
ture, and its eigenvectors correspond to the principal
curvature directions. Mean (H) and Gaussian (K) cur-
vature are computed from principal curvatures as:
H =
1
2
(λ
1
+ λ
2
),
K = λ
1
λ
2
.
(4)
2.2 Related Work
As already mentioned, curvature cannot be exactly
computed for discrete geometry. Instead of that, only
an approximation (or estimation) can be calculated.
There are two main categories of approaches - dis-
crete and surface fitting. Discrete methods calculate
curvature directly from the data, while surface fitting
tries to find a local approximation of the surface and
calculates the curvature of this approximation. Usu-
ally, discrete methods are faster but less accurate.
There are many algorithms for the curvature esti-
mation, often varying only in details. A comparison
can be found in (Magid et al., 2007). Algorithms re-
lated to the design of the proposed algorithm are sum-
marized in the next subsections.
2.2.1 Discrete Methods
The discrete method from (Rusinkiewicz, 2004) uses
the second fundamental form to calculate the curva-
ture estimate per triangle. These curvatures are then
distributed to triangle vertices. Uniform or Voronoi
area weights can be used to express the vertex cur-
vature. This step is similar to normal vector calcu-
lation for a triangle mesh. The algorithm (Griffin
GRAPP 2016 - International Conference on Computer Graphics Theory and Applications
152
et al., 2012) is used for volumetric datasets. This algo-
rithm is a variation of (Rusinkiewicz, 2004), running
entirely on GPU, and it is optimized for deformable
meshes. The interactive nature of this algorithm is
achieved by a GPU parallelization rather than algo-
rithmically.
An algorithm similar to (Rusinkiewicz, 2004) has
been presented in (Theisel et al., 2004). The triangle
curvature computation is based on triangle vertices
positions and unnormalized normals. By a linear in-
terpolation, a single point and a normal is calculated
for each triangle. The estimated curvature depends on
the length and quality of the normals.
The algorithm to compute curvature estimation di-
rectly from the triangles can be found in (Meyer et al.,
2003). The mean curvature is computed using a dis-
cretization of the Laplace operator. Voronoi areas
of triangles shared by a vertex are used as weight
functions. The Gaussian curvature is calculated from
the sum of vertex incident angles, weighted by same
Voronoi areas as for the mean curvature.
For a regular height field, curvature can be cal-
culated directly by using Monge Patch (Gray, 1997).
From a regular height field, derivatives can be es-
timated using neighboring points values, which are
then used in a series of equations.
2.2.2 Surface Fitting Methods
Surface fitting methods approximate the surface by
the least squares techniques. An algorithm for point
clouds based on this approach was presented in (Yang
and Qian, 2007).
Surface fitting can also be done by finding a local
surface approximation, often using a B
´
ezier patch, see
(Razdan and Bae, 2005). The curvature is computed
at a single vertex directly from the patch approxima-
tion. The computational cost is very low, but if the
selected neighborhood is small, the results can be in-
correct.
Another approach based on B
´
ezier patch was pre-
sented in (Zhihong et al., 2011). First, a local B
´
ezier
surface is calculated for every triangle. From this sur-
face, curvature can be directly calculated. The B
´
ezier
surface patch, however, has no G
1
continuity between
neighboring surfaces. On the edges, there could be a
steep change in the curvature. An improvement has
been proposed by (F
¨
unfzig et al., 2008), where G
1
continuous patch is computed as a blend of B
´
ezier
surfaces over neighboring triangles. From this patch,
curvature can be directly calculated using an analytic
solution as proposed in (Boschiroli et al., 2012). A
drawback of this method is that the second deriva-
tives are much more complex than for a simple B
´
ezier
patch.
Curvature estimations based on surface fitting in
screen space are not very common. The only algo-
rithm known to us is by (Mellado et al., 2013). They
propose the screen space algorithm using sphere fit-
ting. For each pixel, the best fitting sphere is found.
With this approach, however, only the mean curvature
is calculated, while the Gaussian and principal curva-
tures cannot be computed this way.
3 THE PROPOSED ALGORITHM
The proposed algorithm works in the screen space
and it can also be used for classic triangle meshes.
The core of the algorithm is similar to (Rusinkiewicz,
2004).
First, a description of the proposed algorithm for a
triangle mesh is presented. The screen space version
is discussed next.
3.1 BASIC ALGORITHM
The main idea is to describe every triangle indepen-
dently by the shape operator W (recall Equation (3)).
Elements of the shape operator must be calculated to
find eigenvalues of the matrix and the final curvatures.
The proposed method uses a local orthonormal ba-
sis. In such a case, the first fundamental form (I) be-
comes an identity matrix, which means that the sec-
ond fundamental form (II) is equivalent to the shape
operator, i.e. W = II.
To eliminate one dimension, every triangle is
transformed to a local coordinate system, also known
as the tangent space. Once the triangle is in the local
space, one of the dimensions is constant and repre-
sents the plane of the triangle. In the following calcu-
lations, this dimension is not used and the problem is
reduced from 3D to 2D.
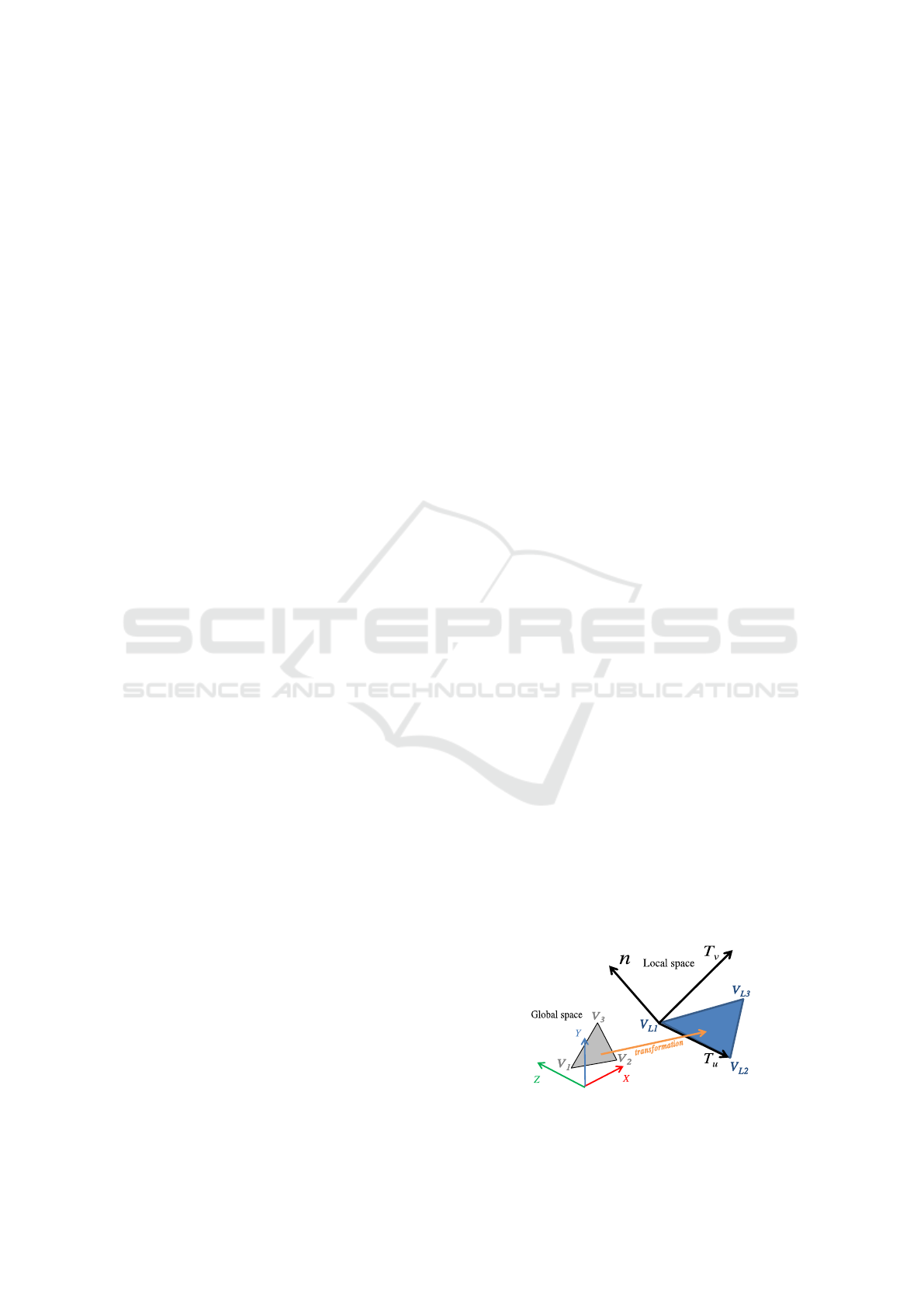
3.1.1 Triangle Conversion to the Local System
For every triangle, given by its vertices V
1
,V
2
,V
3
and
normal vectors V n
1
,V n
2
,V n
3
, a local orthonormal co-
ordinate system is built (see Figure 2).
Figure 2: Local triangle transformation.
Fast Screen Space Curvature Estimation on GPU
153

One of the triangle vertices is selected as the basis
origin and subtracted from every triangle vertex. The
matrix which transforms the triangle to the local sys-
tem is created from the three-dimensional basis vec-
tors T
u
, T
v
, n. These vectors are obtained using
T
u
=
V
2
−V
1
|V
2
−V
1
|
,
n =
T
u
×(V
3
−V
1
)
|T
u
×(V
3
−V
1
)|
,
T
v
=
T
u
×n
|T
u
×n|
.
(5)
The original triangle is expressed in this local sys-
tem, resulting in vertices V
L1
,V
L2
,V
L3
and normals
V n
L1
,V n
L2
,V n
L3
. Sample conversion of one of the
triangle vertices from the global to the local system is
calculated as:
V
L2
=
T
ux
T
uy
T
uz
T
vx
T
vy
T
vz
n
x
n
y
n
z
(V
2
−V
1
) . (6)
Normals should be converted using the inverse
transposed matrix. Due to the orthonormality of the
system, the matrix inverse is not needed, since an in-
version of an orthonormal matrix is equal to matrix
transposition.
3.1.2 The Curvature Calculation
The triangle in the local space is used to build the
shape operator (see in Equation (2)), where variables
L, M, N are unknown.
The shape operator describes the change of the
normal along an edge of the triangle. The triangle is
in the local space and one of the coordinates (normal)
is constant. This coordinate is left out, which leads
to 2D vectors instead of 3D. The edges of the triangle
are expressed as 2D vectors
(u
i
, v
i
)
T
= V
Li
−V
L(i+1) mod 3
, (7)
and changes of the triangle normals are 2D vectors
(dNu
i
, dNv
i
)
T
= V n
Li
−V n
L(i+1) mod 3
, (8)
where i = 1, 2, 3 is the triangle edge index.
Changes of normals along the edges of the triangle
are known. These changes together with edge direc-
tion vectors are used to create a system of equations
to find the unknown variables L, M, N. For one edge
of the triangle, we get an underdetermined system
L M
M N
u
1
v
1
=
dNu
1
dNv
1
. (9)
However, by constructing the same system for ev-
ery edge of the local space triangle, an overdeter-
mined system is obtained. The system is in the form
Ax = b, the least squares method is used to obtain un-
known variables:
x =
(A
T
A)
−1
A
T
b
. (10)
In this particular case, the matrix A is built from
the triangle edge vectors (u
i
, v
i
)
T
, i = 1, 2, 3 and b
is the vector of changes of the triangle normals
(dNu
i
, dNv
i
)
T
, i = 1, 2, 3. Index i denotes the triangle
edge index. The final matrices are as follows:
A =
u
1
v
1
0
0 u
1
v
1
u
2
v
2
0
0 u
2
v
2
u
3
v
3
0
0 u
3
v
3
, b =
dNu
1
dNv
1
dNu
2
dNv
2
dNu
3
dNv
3
, x =
L
M
N
.
(11)
The total number of numerical operations can be
decreased by optimization. First, a substitution B =
A
T
A is introduced. The matrix B is symmetric and its
elements can be represented by variables p, q, r:
B = A
T
A =
p q 0
q p + r q
0 q r
,
p = u
2
1
+ u
2
2
+ u
2
3
,
q = u
1
v
1
+ u
2
v
2
+ u
3
v
3
,
r = v
2
1
+ v
2
2
+ v
2
3
.
(12)
The inverse of the matrix B can be computed using
Equation (13). Since B is symmetric, the computation
is fast and easy.
B
−1
= det(B)
p(r + p) −q
2
−qr q
2
−qr pr −pq
q
2
−pq p(r + p) −q
2
(13)
The final step is to calculate values for the un-
known vector x. A part of this step can be simpli-
fied, because the inverse of the matrix B is symmetric
(see Equation (14)) and the matrix A has many zero
elements. A simplified multiplication is expressed by
Equation (15).
B
−1
= det(B)
b
1
b
2
b
3
b
2
b
4
b
5
b
3
b
5
b
6
(14)
B
−1
A
T
= det(B)∗
u
1
b
1
u
1
b
2
u
2
b
1
u
2
b
2
u
3
b
1
u
3
b
2
u
1
b
2
u
1
b
4
u
2
b
2
u
2
b
4
u
3
b
2
u
3
b
4
u
1
b
3
u
1
b
5
u
2
b
3
u
2
b
5
u
3
b
3
u
3
b
5
+
v
1
b
2
v
1
b
3
v
2
b
2
v
2
b
3
v
3
b
2
v
3
b
3
v
1
b
4
v
1
b
5
v
2
b
4
v
2
b
5
v
3
b
4
v
3
b
5
v
1
b
5
v
1
b
6
v
2
b
5
v
2
b
6
v
3
b
5
v
3
b
6
(15)
GRAPP 2016 - International Conference on Computer Graphics Theory and Applications
154

Having obtained the final vector x, we can con-
struct the desired shape operator. From this matrix,
the eigenvalues λ
1
, λ
2
are computed by solving the
characteristic polynomial. These values correspond
to the principal curvature estimated for the triangle.
These curvatures can be used to evaluate the mean and
Gaussian curvature (see Equation (4)).
The presented algorithm computes the curvature
for each triangle. To obtain the curvature at the ver-
tices, we have to use all adjacent triangles at the given
point. The final curvature can be estimated as an av-
erage from all adjacent triangles or the curvature can
be further weighted by the triangle area.
In the above calculations, an overdetermined sys-
tem was constructed from all three edges of the trian-
gle. To solve the system, only two edges are sufficient
(values for i = 3 will be zero). Differences in both ap-
proaches are discussed in Section 4.
3.2 Screen Space Version
The screen space version of the proposed algo-
rithm fits directly into an existing deferred render-
ing pipeline. Only normal and depth (from which
the position is reconstructed) is required for every
pixel. There could be probably some quality improve-
ments, if additional information (id of the triangle to
which the current pixel belongs, the triangle size in
the screen space etc.) were available, but this is not
the current target.
The screen space depth buffer can be interpreted
as a 2.5D function with an underlying regular grid and
function values of the depth. In the screen space, there
is a constant step size between neighboring pixels.
Those pixels are triangulated and each pixel center is
taken as a triangle vertex. One possible local triangu-
lation can be seen in Figure 3. This screen space tri-
angulation is converted to the world or camera space
by reconstruction of the position and the normal for
each pixel. This creates a simple triangulated mesh
and the curvature is estimated on this mesh using the
technique described in Section 3.1.
Figure 3: 1-ring neighborhood pixels.
The algorithm from Section 3.1 can be used di-
rectly in the screen space. It can run entirely on the
GPU, using a pixel shader. The inverse matrix can
be computed very fast (Equation (13)) and only six
values have to be stored due to the matrix symmetry.
If all three edges of each triangle are used, there
is a limitation in Equation (15) caused by shaders,
where maximal dimension of the native data type can
be four, but 3 ×6 matrix and 6 ×1 vector are needed.
If the simplified matrices from Equation (15) are used,
the calculation can be split into two parts. Each of
these parts has a halved dimension (Equation (16)) of
the original matrix.
B
1
=
u
1
b
1
+ v
1
b
2
u
1
b
2
+ v
1
b
3
u
2
b
1
+ v
2
b
2
u
1
b
2
+ v
1
b
4
u
1
b
4
+ v
1
b
5
u
2
b
2
+ v
2
b
4
u
1
b
3
+ v
1
b
5
u
1
b
5
+ v
1
b
6
u
2
g +v
2
b
5
,
B
2
=
u
2
b
2
+ v
2
b
3
u
3
b
1
+ v
3
b
2
u
3
b
2
+ v
3
b
3
u
2
b
4
+ v
2
b
5
u
3
b
2
+ v
3
b
4
u
3
b
4
+ v
3
b
5
u
2
b
5
+ v
2
b
6
u
3
b
3
+ v
3
b
5
u
3
b
5
+ v
3
b
6
,
x = det(B)
B
1
dNu
1
dNv
1
dNu
2
+ B
2
dNv
2
dNu
3
dNv
3
(16)
If only two edges are used, calculations can be
computed even more efficiently on the GPU:
x = det(B)
u
1
b
1
+ v
1
b
2
u
1
b
2
+ v
1
b
3
u
1
b
2
+ v
1
b
4
u
1
b
4
+ v
1
b
5
u
1
b
3
+ v
1
b
5
u
1
b
5
+ v
1
b
6
u
2
b
1
+ v
2
b
2
u
2
b
2
+ v
2
b
3
u
2
b
2
+ v
2
b
4
u
2
b
4
+ v
2
b
5
u
2
g +v
2
b
5
u
2
b
5
+ v
2
b
6
dNu
1
dNv
1
dNu
2
dNv
2
.
(17)
All calculations are based on triangles that need
to be reconstructed in the screen space. They are ob-
tained directly from the currently rendered pixel and
its neighbors, see again Figure 3. However, if the
neighborhood width is only one pixel (as in Figure
3), according to our tests, a single triangle suffices to
compute the curvature estimation.
3.3 Level of Detail
In the screen space, visible details often depend on the
camera distance from the scene. Small triangles in the
world space may occupy almost all the pixels of the
rendered image if the camera is very close to the sur-
face. If the camera is far away, the same triangle can
take only one pixel of the final image. Considering
this, a level of detail technique can be used to improve
the visual quality of the estimated curvature.
If only a basic 1-ring neighborhood is used (see
Figure 3), triangles of the original mesh can be seen
in the estimated curvature (see Figure 4(a)). The es-
timated curvature within every triangle is constant.
GPU interpolates normals and positions during ren-
dering, leading to smooth Phong shading, but the pro-
posed method uses differences in the positions and
Fast Screen Space Curvature Estimation on GPU
155

normals which are constant (except for the numeri-
cal errors) for the flat geometry. It leads to constant
curvature at every pixel of each triangle.
To mitigate this problem, level of detail (LOD)
sampling can be used. For closer points, triangles
are constructed from a wider neighborhood. Using
this approach, the curvature should be computed from
more than one triangle. A maximal number of eight
triangles per pixel, creating a triangle fan, is sufficient
according to our experiments. The final curvature is
calculated as an average value from all triangles. The
result with LOD is shown in Figure 4(b).
(a) Without LOD (b) With LOD
Figure 4: Screen space curvature.
3.4 Limitations
Similarly to other screen space techniques, the pro-
posed algorithm has its disadvantages. When two
neighboring pixels do not come from the same part
of the surface, there appears a surface discontinuity
between those pixels and an artifact in the computed
curvature may appear.
If only 1-ring neighborhood is used, this problem
is not significant and can be sometimes ignored. It
causes incorrect curvature on edges, but those incor-
rect values are only one pixel wide.
Incorrect values are more problematic when LOD
is used. The reconstructed triangles may consist of
points, which come from a discontinuous surface.
This situation cannot be distinguished directly in the
screen space. To solve this problem, conditions based
on the depth can be used. If the depth value of a
screen space triangle is bigger than a threshold, the
triangle is rejected and not used in further computa-
tions. If all triangles are rejected, we use only one tri-
angle without LOD to estimate the curvature for the
current pixel. This approach is not optimal and in the
future, we would like to improve it in the future by
using a different triangle reconstruction technique or
by detecting problematic cases more accurately than
by a threshold.
4 EXPERIMENTS AND RESULTS
To test the proposed method, a PC with the following
configuration was used: Intel Core i7 CPU running
at 4GHz, 32GB of RAM memory, nVidia Geforce
960GTX graphics card with 2GB of video memory.
The algorithm was implemented in C++ and OpenGL
4.4 with GLSL shaders.
The implementation of the algorithm by (Mellado,
2015), based on (Mellado et al., 2013), was done us-
ing GLSL instead of CUDA used in the original paper.
The color gradient used for all visualisations goes
from a blue for negative values to a red color for pos-
itive values. A green color in the middle represents
zero. See Figure 5.
Figure 5: Color gradient used in presented visualizations.
4.1 Curvature Error
In this section, comparison of the proposed method
for a triangle mesh, as defined in Section 3.1, and
exactly computed curvature from analytic surfaces is
provided. Every test uses exact unit-length normals
computed from the function itself. In the compar-
isons, two and three edges were used to create the
overdetermined system of equations.
The proposed method on the triangle mesh has
been also tested against the B
´
ezier triangles algorithm
from (Zhihong et al., 2011).
First, a sphere was tested. A sphere has a con-
stant mean and Gaussian curvature, dependent on the
sphere radius r. Curvatures on the sphere can be cal-
culated as H =
1
r
2
and K = −
1
r
. As a discrete repre-
sentation of the sphere, a subdivided icosahedron with
an exact normals and radius 6 was used. The pro-
posed method in both variations has a constant mean
squared error (MSE) with value 8.2 ∗10
−16
for Gaus-
sian and 7.8 ∗10
−17
for mean curvature. For different
radii, MSE has a similar behavior.
Next, two analytic functions were tested (see Fig-
ure 6). The function f
1
has convex and concave parts,
a high peak at its center, and it is undefined at the point
[0, 0] (at this point, division by zero would occur).
Function f
2
has a saddle shape with minor bumps.
For tests, the functions were tessellated using a
Delaunay triangulation in the XY plane using uni-
formly distributed points with x, y ∈ [−10, 10]. The
MSE value gives the error of the proposed method on
the triangle mesh in comparison with the curvature
analytically computed from the input function. See
Figure 7.
Results of the comparison are in Figure 8. Small
peaks in the graph are caused by randomness of the
point positions. It is more visible for f
1
due to its
GRAPP 2016 - International Conference on Computer Graphics Theory and Applications
156

Figure 6: Tested functions f
1
= 10
sin(
√
x
2
+y
2
)
√
x
2
+y
2
)
, (x 6= 0), (y 6=
0), f
2
= sin(x)cos(y) +0.1(x
2
−y
2
), x, y ∈< −10;10 >.
(a) Mean curvature (b) Gaussian curvature
Figure 7: Curvatures of f
2
calculated from the triangle
mesh.
peak around the point [0, 0]. For denser tesellations,
there is a small difference in using two or three edges
of the triangle to solve the system. In some cases, two
edges offer better results and vice versa.
Another comparison of the proposed method was
done against the algorithm (Zhihong et al., 2011) us-
ing B
´
ezier triangles. This algorithm was chosen ac-
cording to the promising results published in the orig-
inal paper. The algorithm has worse results on the tri-
angle meshes created using random points, see Figure
9. The MSE values were varying from 0.5 to almost
Figure 8: MSE of the method for the triangle mesh com-
pared to the analytically computed curvature evaluated di-
rectly from the implicit function.
(a) (Zhihong et al.,
2011)
(b) Proposed method
Figure 9: The comparison of the curvature of f
1
, compared
on a tessellation created on random points.
40. For most of the triangles, the calculated curvature
gives the error comparable with our proposed method,
however, large error values appeared for some small
or sliver triangles resulting in too arched B
´
ezier tri-
angles. This problem is not present in the proposed
method.
4.2 Screen Space Comparison
The comparison of the screen space method is done
against the curvature calculated by the proposed
method using three edges directly on the triangle
mesh with and without the LOD active. Even with
only two edges, the results were almost identical
(about 2% difference in calculated values). The pro-
posed algorithm was also compared with (Mellado
et al., 2013), the only other screen space technique
known to us.
The tested models are: Stanford Dragon (300 000
vertices), MaxPlanck (152 403 vertices), Function f
1
(15 000 vertices) and Subdivided icosahedron (vary-
ing number of vertices). In the screen space, the qual-
ity of the computed curvature depends on the camera
distance from the model. If we compute the curva-
ture for the triangle mesh and render the result, with
the camera moving away from the model, the trian-
gles become smaller and more triangles can be ren-
dered in the same pixel. This can cause an incorrect
curvature to be visualized. In the proposed screen
space method, the problem associated with rasteriza-
tion cannot happen, because only the visible parts are
used to calculate the result and only one value is used
for the final pixel. In every test, the model was tested
as fully visible on the screen and the camera was mov-
ing away from the model. The dependency of MSE
on the distance between the viewer and the model is
shown in the following graphs.
The test with recursively subdivided icosahedron
sphere with radius 6 showed a similar behavior to the
per vertex computed values from tests in Section 4.1.
The only difference was a small noise between edges
of the model and the background of the scene.
Fast Screen Space Curvature Estimation on GPU
157

Figure 10: Comparison of the screen space MSE for the
mean curvature calculated directly from the triangle mesh.
The proposed method with, without LOD and algorithm
from (Mellado et al., 2013) (Mellado) were tested.
In all other tests, remaining models were used.
From the graphs in Figure 10 it can be seen that the
quality of both screen space algorithms is comparable
for the mean curvature. For the dragon model, using
LOD has a little or no effect at all. The original model
has a dense tessellation and LOD can skip fine details.
On the other hand, for the model of the function, the
proposed method with LOD achieves better quality.
Gaussian curvature comparison was done only
with and without LOD, since there is no other screen
space method known to us that calculates the Gaus-
sian curvature. See results in Figure 11. The behav-
ior is similar to Figure 10, with a roughly doubled
amount of the MSE error. This is caused by the cur-
vature calculation, where the mean curvature is only
a sum of the principal ones, while the Gaussian is
computed by multiplying principal curvatures. In that
case, the errors of both values are multiplied as well.
The visual comparison of the proposed method
with (Mellado et al., 2013) can be seen in Figure
12. Both algorithms have a comparable visual quality.
The proposed method results look sharper, (Mellado
et al., 2013) is more blurry. See Figure 13 for com-
parison of the quality of the proposed method in the
screen space against the same method in the object
space.
No LOD is used to show real differences based on
the camera distance. For the camera at a greater dis-
tance (full model), there is almost no visible differ-
ence. With camera closer to the surface (the detailed
model), the triangles of the mesh begin to appear in
the screen space curvature.
The effect of LOD can be seen in Figures 14 - 16.
Figure 11: Comparison of the proposed screen space MSE
for the Gaussian curvature calculated directly from the tri-
angle mesh.
(a) Proposed method
(b) (Mellado et al., 2013)
Figure 12: Comparison of the mean curvature. As (Mellado
et al., 2013) has no LOD, the presented comparison also
uses none.
If the camera is moving away from the mesh, there
is a distance, from which further there is a small or
no difference between using and not using LOD. In
some cases, using LOD can bring worse results as it
smooths out fine details (see Figure 14). On the other
hand, in the example of the Gaussian curvature in Fig-
ure 15, the use of LOD improved the result consider-
(a) Object space (b) Screen space without
LOD
Figure 13: Comparison of the mean curvature for the Max-
Planck model.
GRAPP 2016 - International Conference on Computer Graphics Theory and Applications
158

(a) Object space (b) Screen space without LOD (c) Screen space with LOD
Figure 14: Comparison of the mean curvature.
(a) Object space (b) Screen space without LOD (c) Screen space with LOD
Figure 15: Comparison of Gaussian curvature using function f
1
from Section 4.1.
(a) Object space (b) Screen space
without LOD
(c) Screen space
with LOD
Figure 16: Detail of the mean curvature.
ably. Another comparison can be seen in the closeup
in Figure 16. If the camera moves very close to the
surface, LOD is required to obtain a smooth result.
Without LOD, the computed curvature appears as ran-
dom colors. In some cases, e.g., in wireframe view,
this visualization can be sometimes enough to see the
shape. To set a suitable distance for LOD is, however,
difficult - the same value does not work for all models.
4.3 Performance
The proposed method runs at interactive frame rates.
Due to the independence on the geometry, all tested
models brought nearly the same results. In the tests,
the method was computed for pixel coverage of 2 −
100 per cent of the screen. The depth value of the
remaining pixels was set to infinity to discard these
pixels. The comparison was done against the screen
space method from (Mellado et al., 2013).
The resulting performance can be seen in Fig-
ures 17 and 18. In both tests, a decrease of perfor-
Figure 17: Frame time based on screen pixel coverage. The
proposed algorithm in version with only two edges (with
and without LOD) against (Mellado et al., 2013) (Mellado)
were tested.
mance is partially caused by LOD computation itself
but mostly by the need of branches in the pixel shader
to decide if the triangle can be used or will be rejected
as described in Section 3.3. With a comparable visual
quality as (Mellado et al., 2013) (no LOD used), the
proposed algorithm is much faster if calculations use
only two edges of the triangle.
In Figure 18, the same scene was tested with all
three edges used for computation. This version is con-
siderably slower, due to the solution of Equation (16).
In the two edge solution, only one matrix is needed
(Equation (17)).
Fast Screen Space Curvature Estimation on GPU
159
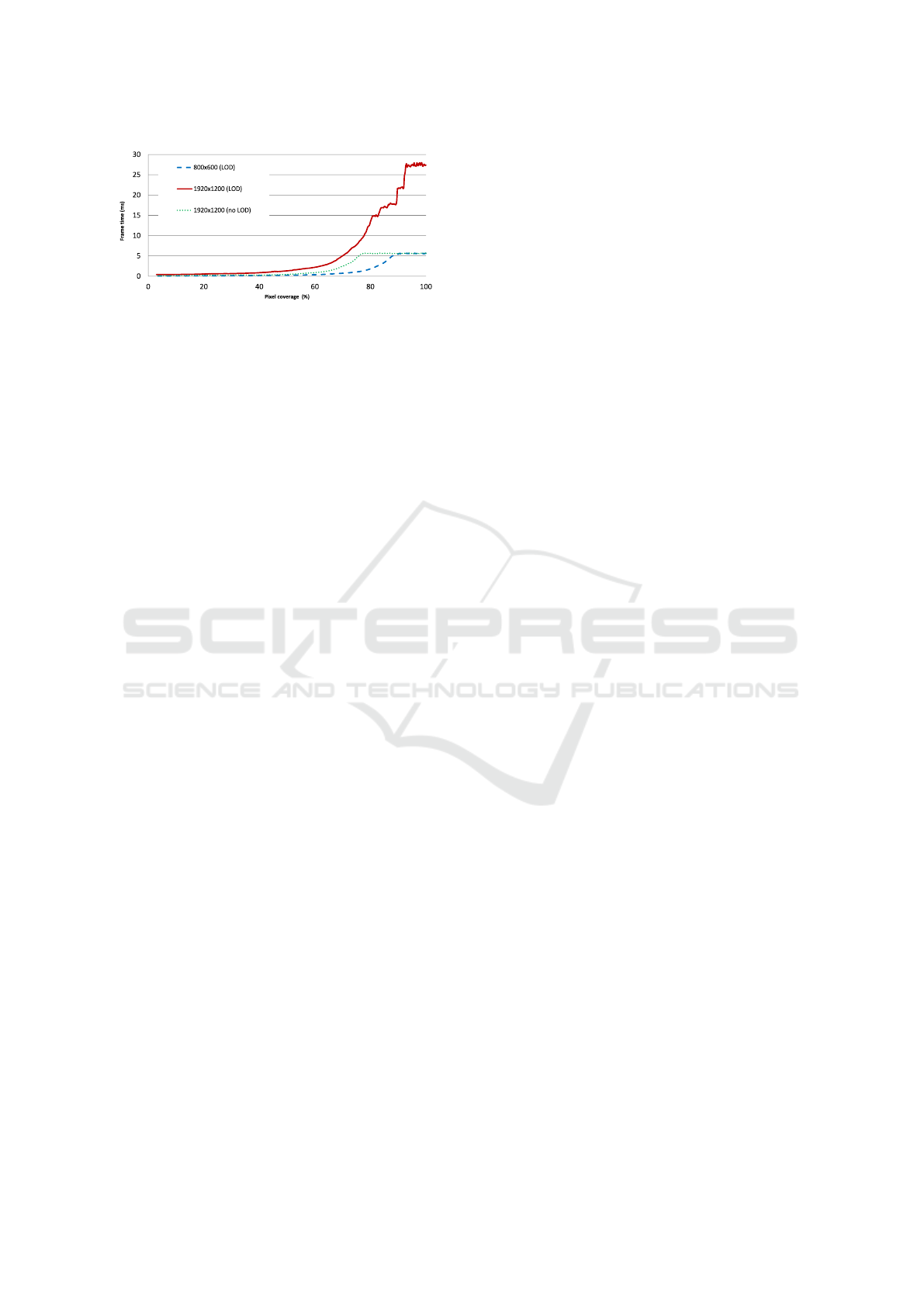
Figure 18: Proposed algorithm tested with all 3 edges of the
triangle used for the curvature calculation.
5 CONCLUSIONS
This paper presented an algorithm for estimating cur-
vature in screen space which can compute principal
curvatures, is easy to implement and runs in real-time.
It can be easily added to existing rendering pipelines.
Apart from the screen space, the same algorithm can
be used to compute the curvature directly from the tri-
angle meshes.
The limitations of this technique are similar to
other screen-space algorithms. There are possible
problems with surface discontinuities. Estimated cur-
vature depends on the distance of the mesh from the
camera, where small details are smoothed if camera
is far away from the surface.
In the future work, further LOD improvement and
stability during view changes are planned.
We would also like to use the algorithm for the
ambient occlusion estimation. Some research has
been done on this topic by (Hattori et al., 2011), but
the curvature was precalculated from the model in ob-
ject space.
A reference implementation of the proposed
method (shader source code and test application) is
available at http://graphics.zcu.cz/ sscurvature.html.
ACKNOWLEDGEMENTS
This work was supported by the Czech Ministry of
Education, Youth and Sports - the project LO1506 and
University spec. research - 1311; and by the UWB
grant SGS-2013-029 Advanced Computer and Infor-
mation Systems.
REFERENCES
Boschiroli, M., F
¨
unfzig, C., Romani, L., and Albrecht, G.
(2012). {G1} rational blend interpolatory schemes: A
comparative study. Graphical Models, 74(1):29 – 49.
F
¨
unfzig, C., M
¨
uller, K., Hansford, D., and Farin, G. (2008).
Png1 triangles for tangent plane continuous surfaces
on the gpu. In Proceedings of Graphics Interface
2008, GI ’08, pages 219–226, Toronto, Ont., Canada,
Canada. Canadian Information Processing Society.
Gray, A. (1997). Surfaces in 3-dimensional space via math-
ematica. In Modern Differential Geometry of Curves
and Surfaces with Mathematica, chapter 17, pages
394–401. CRC Press, Inc., Boca Raton, FL, USA, 2nd
edition.
Griffin, W., Wang, Y., Berrios, D., and Olano, M. (2012).
Real-time gpu surface curvature estimation on de-
forming meshes and volumetric data sets. IEEE
TVCG, 18(10):1603–1613.
Hattori, T., Kubo, H., and Morishima, S. (2011). Real time
ambient occlusion by curvature dependent occlusion
function. In SIGGRAPH Asia 2011 Posters, SA ’11,
pages 48:1–48:1, New York, NY, USA. ACM.
Magid, E., Soldea, O., and Rivlin, E. (2007). A comparison
of gaussian and mean curvature estimation methods
on triangular meshes of range image data. Computer
Vision and Image Understanding, 107(3):139 – 159.
Mellado, N. (2015). Screen space curvature using cuda/c++
(algorithm implementation from patate library).
Mellado, N., Barla, P., Guennebaud, G., Reuter, P., and
Duquesne, G. (2013). Screen-space curvature for
production-quality rendering and compositing. In
ACM SIGGRAPH 2013 Talks, SIGGRAPH ’13, pages
42:1–42:1, New York, NY, USA. ACM.
Meyer, M., Desbrun, M., Schr
¨
oder, P., and Barr, A. (2003).
Discrete differential-geometry operators for triangu-
lated 2-manifolds. In Hege, H.-C. and Polthier, K., ed-
itors, Visualization and Mathematics III, Mathematics
and Visualization, pages 35–57. Springer Berlin Hei-
delberg.
Razdan, A. and Bae, M. (2005). Curvature estimation
scheme for triangle meshes using biquadratic bzier
patches. CAD, 37(14):1481 – 1491.
Rusinkiewicz, S. (2004). Estimating curvatures and their
derivatives on triangle meshes. In Proceedings of
the 3DPVT ’04, 2Nd International Symposium, pages
486–493, Washington, DC, USA. IEEE Computer So-
ciety.
Theisel, H., Rossi, C., Zayer, R., and Seidel, H.-P. (2004).
Normal based estimation of the curvature tensor for
triangular meshes. In CG&A, 2004. PG 2004. Pro-
ceedings. 12th Pacific Conference on, pages 288–297.
Yang, P. and Qian, X. (2007). Direct computing of sur-
face curvatures for point-set surfaces. In Botsch, M.,
Pajarola, R., Chen, B., and Zwicker, M., editors, Eu-
rographics Symposium on Point-Based Graphics. The
Eurographics Association.
Zhihong, M., Guo, C., Yanzhao, M., and Lee, K. (2011).
Curvature estimation for meshes based on vertex nor-
mal triangles. CAD, 43(12):1561 – 1566.
GRAPP 2016 - International Conference on Computer Graphics Theory and Applications
160
