
Real-time Scale-invariant Object Recognition from Light Field Imaging
S
´
everine Cloix
1,2
, Thierry Pun
2
and David Hasler
1
1
Vision Embedded Systems, CSEM SA, Jaquet Droz 1, Neuch
ˆ
atel, Switzerland
2
Computer Science Department, University of Geneva, Route de Drize 7, Carouge, Switzerland
Keywords:
Object Recognition, Object Classification, Light Field, Plenoptic Function, Scale Invariance, Real-time,
Dataset.
Abstract:
We present a novel light field dataset along with a real-time and scale-invariant object recognition system. Our
method is based on bag-of-visual-words and codebook approaches. Its evaluation was carried out on a subset
of our dataset of unconventional images. We show that the low variance in scale inferred from the specificities
of a plenoptic camera allows high recognition performance. With one training image per object to recognise,
recognition rates greater than 90 % are demonstrated despite a scale variation of up to 178 %. Our versatile
light-field image dataset, CSEM-25, is composed of five classes of five instances captured with the recent
industrial Raytrix R5 camera at different distances with several poses and backgrounds. We make it available
for research purposes.
1 INTRODUCTION
The detection of “everyday objects” is still an active
area of research. Current algorithms that detect ob-
jects by category, for example keys, doors, cars, cats,
glasses, etc. are still not good enough for practical ap-
plications (Everingham et al., 2015) that require very
low false positive even nil according to the applica-
tion. While most of the works on classification has
been dealing with 2D images over the last decades,
a number of public datasets has been made available
for the purpose of developing new methods. A sin-
gle 2D image however gives partial information of the
fronting scene since the sensor records a projection of
the 3D scene, losing the third spatial dimension.
The changes in distance of an object of known
real dimensions are represented by a change in size
on the 2D image. The scale is thus often dealt with
iteratively running the detector on downsampled im-
ages or with depth estimation (Gavrila and Munder,
2006) prior to the recognition step (Helmer and Lowe,
2010). Stereo-view strategies allow to extract the
third spatial dimension, resulting in either a sparse
3D point cloud (Cloix et al., 2014) or a range of dis-
tances to infer the size of the detection window in ob-
ject detection algorithms (Helmer and Lowe, 2010).
The depth map of the captured scene is computed by
triangulating over the scene points visible and identi-
fied in both images. Commercial devices commonly
employed are stereo cameras like the Point Grey bum-
blebee2
1
and active sensors, e.g. Microsoft Kinect
2
and Asus Xtion
3
, developed to cope with textureless
scenes.
With more than two views, we can call the whole
capture a subset of the “light field”. The definition of
light field comes from the plenoptic function (Adel-
son and Bergen, 1991). For each point in the 3D
scene, the intensity distribution is
P(θ,φ,λ,t,V
x
,V
y
,V
z
), (1)
where θ and φ are the spherical coordinates of the di-
rection of the light ray, λ the wavelength and t the
time dimension. The viewpoint is defined by V
x
, V
y
and V
z
. In practice, a conventional camera is capable
of recording a 2D slice of the scene irradiance. With
the multi-view strategy, we are able to add three other
dimensions describing the location of the view point.
Light fields are thus captured with an array of cam-
eras, a gantry (Levoy, 2011) or the use of a turntable
and a robot (Zobel et al., 2002). Another way to aug-
ment the conventional image capturing with two di-
mensions is the use of a microlens array. This 4D
parameterization (x,y,u,v) is done by two planes, the
1
http://www.ptgrey.com/bumblebee2-firewire-stereo-
vision-camera-systems
2
http://www.xbox.com/en-US/xbox-one/accessories/
kinect-for-xbox-one
3
http://www.asus.com/Multimedia/Xtion/
336
Cloix, S., Pun, T. and Hasler, D.
Real-time Scale-invariant Object Recognition from Light Field Imaging.
DOI: 10.5220/0005678603360344
In Proceedings of the 11th Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2016) - Volume 4: VISAPP, pages 336-344
ISBN: 978-989-758-175-5
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
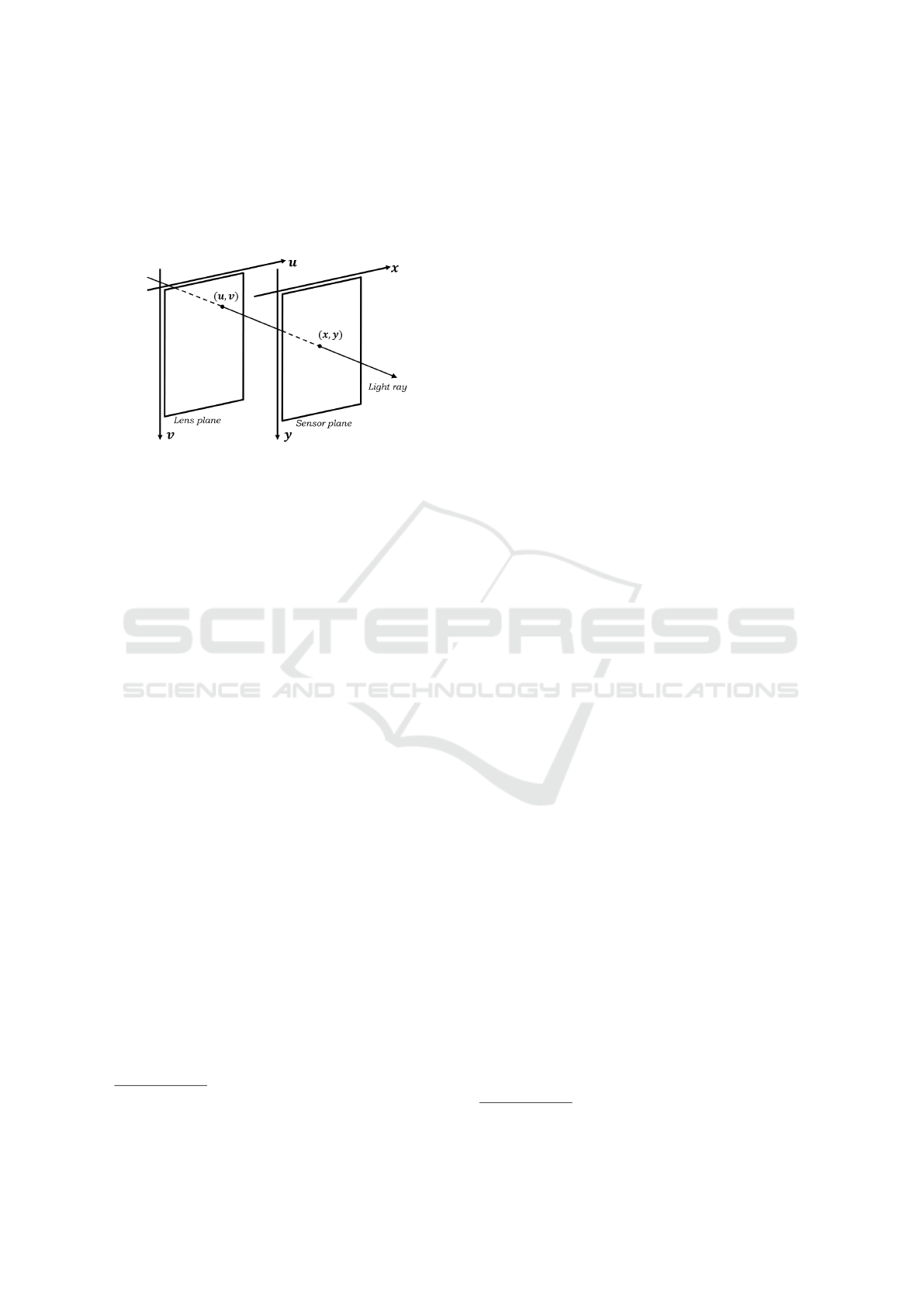
viewpoints plane, (u,v), and the sensor plane, (x, y),
and allows the measurement of the directional distri-
bution of the light (Ng, 2005) (Figure 1). The latter
is named the 4D plenoptic camera with commercial
versions like Lytro
4
and Raytrix
5
.
Figure 1: Two-plane parameterization of the 4D Light field
as explained in (Ng, 2005).
In this article, we present a novel light field dataset
as well as a scale-invariant object recognition sys-
tem based on bag-of-visual-words and codebook ap-
proaches. We assess our method on a subset of our
novel light field dataset. To the best of our knowl-
edge, our dataset is the first of its kind in the domain
of light field for computer vision. We believe that our
approach is the first work that shows how industrial
light field imaging can be successfully employed in
object recognition. We thus expect it to become a
baseline in the community.
This paper is organized as follows. Section 2 de-
scribes the state-of-the-art in light field vision related
to object classification. A review on the existing light
field image datasets is recalled in Section 3 followed
by an exhaustive description of our proposed dataset
(section 4), along with several intended usage scenar-
ios of the data. Section 5 explains the approach of
our scale-invariant recognition system from raw light
field images captured by an industrial plenoptic cam-
era. The experimental results are detailed and dis-
cussed in Section 6 before concluding on the future
work in Section 7.
2 RELATED WORK
Object recognition and classification is an old topic
in computer vision on which research keeps on pro-
gressing thanks to new algorithms and new sensors.
Light field imaging is mainly employed for depth es-
timation and 3D scene or object reconstruction, al-
4
https://www.lytro.com/
5
http://www.raytrix.de/
though, as of today, it is still unclear in which domain
the light field technology will stand out. The exist-
ing datasets were built according to the applications
they were dedicated to. The first light field datasets
were built by the Stanford Computer Graphics Lab-
oratory and are used for computer graphics research
6
. Their array of cameras (Wilburn et al., 2005) cap-
tures scenes for 3D reconstruction like (Levoy, 2011).
Disney research is also a big player in the domain
of scene reconstruction (Kim et al., 2013). These
datasets are however not used for classification pur-
poses. To our knowledge the authors of (Ghasemi and
Vetterli, 2014) are the first to exploit the light field
images for object recognition. They present a scale-
invariant feature, called STILT, built from Epipolar
Plane Images (EPIs) to recognize buildings. An EPI,
initially introduced in (Bolles et al., 1987), is the rep-
resentation of the subset of the data in the x − u do-
main, where each point represents a line whose slope
is proportional to the depth. The STILT feature is
drawn on the Hough transform line detection method
and represents the signature of the entire light field
captured, the invariance in scale being transposed in
a multiplicative scalar. In (Ghasemi et al., 2014),
this feature is used for object category classification.
As far as classification methods are concerned, recent
work of (Coates et al., 2012) shows state-of-the-art re-
sults in unsupervised feature learning on conventional
2D images. One of the learning phase is based on k-
means dictionary learning, similar to codebook learn-
ing from bag-of-visual-word models (Csurka et al.,
2004).
Looking at captures from the Raytrix camera, one
striking characteristic in the light field images of an
object at two different distances is the redundancy of
a unique point of the scene on the final image: the
closer the object, the greater the redundancy. We
aimed at taking advantage of this redundancy feature
to build a scale-invariant object recognition system.
In this paper we exploit the redundancy charac-
teristic of the Raytrix camera to build a recognition
system of objects at various distances without explic-
itly estimating the distance as a feature, nor down-
sampling the input capture. Another contribution is
the release of a new light field images dataset for ob-
ject class recognition purposes as described in 4.4.
3 EXISTING LIGHT FIELD
DATASETS
In order to reduce the assumptions related to physical
6
http://lightfield.stanford.edu/
Real-time Scale-invariant Object Recognition from Light Field Imaging
337

hardware and to keep focus on the development of
new algorithms, other datasets were made of synthetic
images using Blender
TM7
(Wetzstein,; Wanner et al.,
2013). Authors of (Wanner et al., 2013) also cre-
ated datasets capturing real scenes. Image matting is
also an application for which (Joshi et al., 2006) and
(Cho et al., 2014) created their own datasets from real
scenes.
As far as object classification is concerned, it is
still a challenging research topic and several datasets
dedicated to competitions were built. (Ghasemi et al.,
2014) reviewed the most employed ones. The use of
light field imaging for object class recognition is how-
ever rather new and to our knowledge, LCAV-31 is
the only dataset that shares several specifications with
ours. Dedicated to object class recognition, LCAV-
31 gathers 31 classes of household and office objects
captured with a Lytro camera. Each instance is cap-
tured with 3 different viewpoints and several object
locations and angles. Each capture is converted from
the Lytro format to a JPG image and is a 3010 × 3030
pixel grid of 10 × 10 sub-views. While our dataset
detailed in Section 4 is based on a lens-grid repre-
sentation, the LCAV-31 captures are view-grid-based
ones, i.e. each light field is represented by an array
of pictures. LCAV-31 does not offer metadatas such
as location and pose nor masks for segmentation pur-
poses.
4 PROPOSED DATASET
4.1 Goals and Specifications
We aim at building a multipurpose dataset of object
classes to address several aspects of computer vision
applications using light field with a lens-grid-based
representation, namely:
• object classification,
• object recognition,
• corner detection,
• feature point extraction and tracking,
• (3D) pose estimation,
• 3D reconstruction.
4.2 The Acquisition Setup
We built an automated set-up composed of a motor-
ized linear stage, a motorized rotary stage, a high res-
olution background screen and a Raytrix R5 camera.
7
http://www.blender.org/
Figure 2: Acquisition setup. It is composed of a motor-
ized linear stage, a motorized turntable, a high resolution
background screen and a uniform colored ground. Here one
instance of the “person” category is being captured with a
randomly chosen background.
The ground is covered by a uniform colored paper.
Each object is located in the middle of the turntable.
It is captured from 0 to 355 degree with a 5 degree
pitch and at 21 distances from the camera (from 28 to
50 cm). The turntable has an accuracy of 0.2 millide-
grees, and the linear stage an accuracy of 2 microns.
Thus the relative object pose from one image to any
other in the dataset is known with high precision.
The object is placed in front of a background
screen, which is located 6 cm behind the object center
(Figure 2). For each object and each pose, four cap-
tures are acquired: two captures with a uniform back-
ground and two captures with a landscape background
randomly picked from a database of 380 high resolu-
tion images. The screen resolution is large enough
to avoid blur in the acquired image. The captures
on uniform backgrounds are for computing a mask
of the presence of the object, which can be used to
place the object into a virtual environment. This op-
eration of extracting the light field of the object and
integrating it into the light field of a virtual scene be-
ing a complicated operation, we added the two cap-
tures with a high resolution background to make the
database ready for object classification or detection
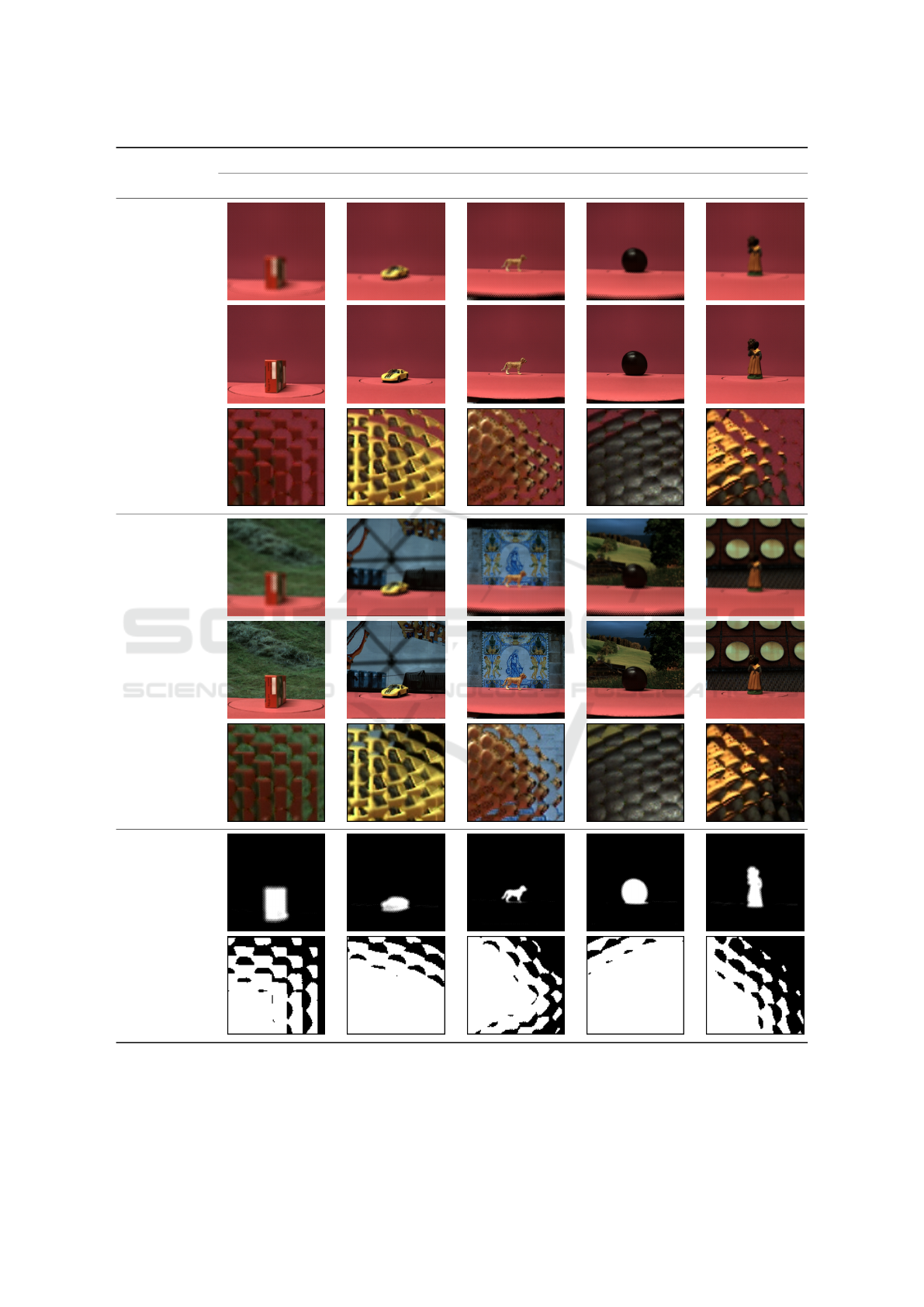
on cluttered background. The dataset is composed of
5 classes of 5 instances of known size (less than 7 cm
width, and height) in order to be in the field of view of
the camera for all the distances (Figure 3). The cate-
gories are : person, four-legged animal, fruit, box and
car.
The ground truth of our dataset, named CSEM-
25, gives: (i) the category whose name belongs to the
WordNet
r
lexical database, (ii) the angle, (iii) the
distance from the camera and (iv) the intra-class in-
stance number, (v) the number that refers to a miscel-
laneous background.
In order to enlarge the usage of our dataset, each
object and each pose acquisition comes with (i) the
raw colored images in PNG format and of size 2044×
2044 pixels, (ii) its mask on raw data and (iii) the best
“all-in-focus” image generated with the Raytrix SDK.
VISAPP 2016 - International Conference on Computer Vision Theory and Applications
338
Class
Box Car Four legged Fruit Person
Uniform background
Raw
All-in-
focus
Zoom
Random background
Raw
All-in-
focus
Zoom
Mask
Whole
Zoom
Figure 3: Dataset samples: on one of the uniform backgrounds and one of the random backgrounds, here are presented one
instance of each class in one of the poses. The “Raw” rows show the colored raw image produced by the Raytrix camera. The
“All-in-focus” rows show the processed image generated by the Raytrix SDK where each pixel is in focus. For each instance
and pose, we deliver a mask as shown in row “Mask”. The “Zoom” rows is a zoom in portion of the raw image or the mask.
Real-time Scale-invariant Object Recognition from Light Field Imaging
339
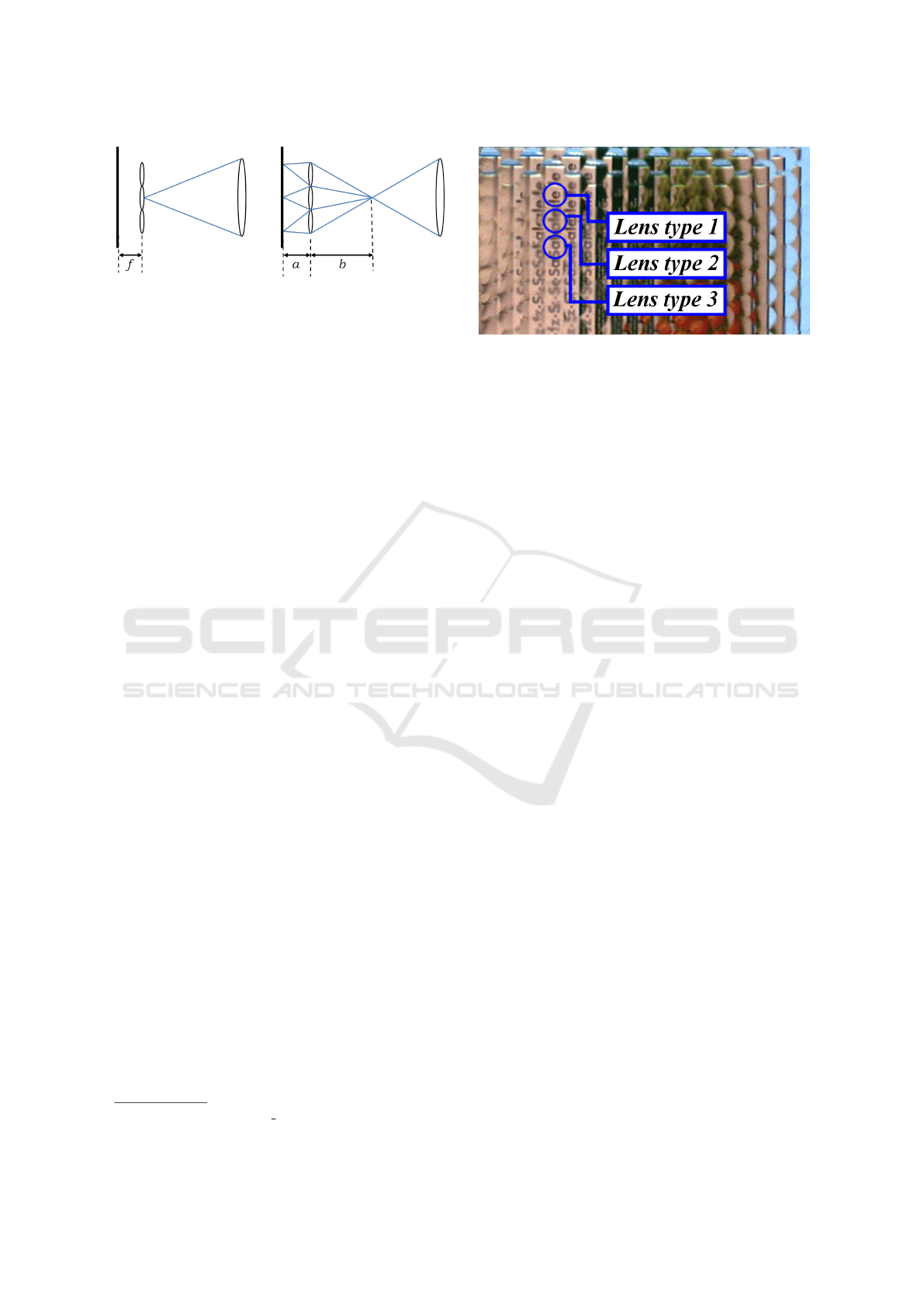
Figure 4: The difference between a Plenoptic 1.0 camera
(left) and a Plenoptic 2.0 camera (right) lies on the location
of the microlens array related to the main lens. In Plenoptic
1.0 the microlens array is on the image plane of the main
lens (1/a + 1/b = 1/ f where f is the focal length of the
microlenses) (Georgiev and Lumsdaine, 2009).
4.3 The Camera
In a standard 2D camera, the image is formed by the
main lens which projects the image of the scene onto
the sensor. In a light field camera, there is an addi-
tional array of microlenses. The captures are lens-
grid-based representations of the light field. As of to-
day, there are two types of cameras: The Plenoptic
1.0 cameras and the Plenoptic 2.0 cameras (Georgiev
and Lumsdaine, 2009) (Figure 4). In the Plenoptic
1.0 camera, the main lens projects the image into the
array of microlenses, which then form a set of micro-
images on the sensor. The 1.0 approach is character-
ized by a very simple relationship between the coor-
dinate on the sensor and the light field (x, y, u, v) co-
ordinates, and the resulting reconstructed image has a
number of pixels equal to the number of microlenses
in the microlens array. An example of a commer-
cial Plenoptic 1.0 camera is the Lytro Camera. In a
Plenoptic 2.0 camera, the image formed by the main
lens is either in front or behind the microlens array.
This approach allows for better resolution, but the
price to pay is a complex relationship between the
light field (x,y, u, v) and the sensor coordinates. The
Raytrix R5 camera
8
is a Plenoptic 2.0 camera (Per-
wass and Wietzke, 2012) composed of an array of
around 7900 microlenses and the image formed by the
main lens (called here the virtual image) falls behind
the microlens array.
It has an additional extended depth-of-field prop-
erty by incorporating three types of microlens with
three different focal lengths (Perwass and Wietzke,
2012). The microlenses lie on a hexagonal grid that
optimizes the sensor coverage (Figure 5). A raw light
field image is composed of a bubble-like pattern; each
bubble is the projection of the virtual image by a sin-
gle microlens. In the rest of the article, a bubble re-
gion is called a micro-image, referring to a microlens.
8
http://www.raytrix.de/tl files/downloads/R5.pdf
Figure 5: Raytrix technology : Three types of microlenses
on a hexagonal grid.
4.4 Possible Usage of The Dataset
The dataset can be used for object classification: it
has several classes of objects (5 instances per class)
and 6048 captures per object so as to train a detec-
tor, which should be able to achieve excellent perfor-
mance. The 3D pose and the camera-to-object dis-
tance are varied and enable testing for scale and pose
invariance. The various backgrounds make the dataset
interesting for image matting and background sub-
traction as in (Cho et al., 2014). The range of an-
gles makes it attractive for 3D reconstruction, similar
to light field captures done with a camera travelling
on a circular rail. Similarly to (Zobel et al., 2002),
the dataset can be employed in the domain of object
tracking and object pose estimation and prediction.
The accuracy of the (relative) poses given by stage
precision can be used to assess the accuracy of pose
estimators, as well as the accuracy and consistency
of corner detectors based on light field data. Eventu-
ally the variety of distances can be used in domains
requiring scale-invariance.
5 OUR SCALE-INVARIANT
RECOGNITION SYSTEM
APPROACH
Today’s light field object classification approaches re-
quire pre-processing like the epipolar-plane images
(EPI) (Ghasemi et al., 2014; Ghasemi and Vetterli,
2014). As shown in Figure 6, the image recorded by
the plenoptic camera is a group of micro-images ly-
ing on a hexagonal grid, each micro-image being the
subset of the virtual image of the scene formed by the
main lens. The presence of redundancy allows depth
estimation (Perwass and Wietzke, 2012).
When we compare two images of the same object
with known dimensions taken at two different dis-
VISAPP 2016 - International Conference on Computer Vision Theory and Applications
340

(a) (b)
(c) (d)
Figure 6: Captures of a figurine at two distances. On a uni-
fied background, at the furthest distance from the camera
(a) with the corresponding zoomed-in part (b); respectively
at the closest distance (c) and (d).
tances, the pattern redundancy is more important on
the closest capture than on furthest away one (Figure
6). The existence of three types of microlenses, i.e.
three different focal lengths, allows the scene to al-
ways be in focus behind at least one type of microlens.
We also notice that the scale change within a micro-
image is very low. In our approach, we therefore aim
at taking advantage of these pattern repetitions and
the low scale variation within the micro-images in or-
der to develop a recognition system that is invariant
to the scale induced by the distance. Works based on
bag-of-visual-words showing interesting performance
on object recognition, the underlying intuition of our
approach is the counting of patches belonging to a de-
fined dictionary (built at training). The collection of
counters results in a unique signature of the object.
We expect that the shape of this signature remains the
same at any distance, only its amplitude varying with
scale (the closer the object, the higher the amplitude).
We propose a baseline method of object recogni-
tion from light field imaging to which future works
can be compared. It is based on the bag-of-visual-
word strategy: (i) a codebook is built from an unsu-
pervised clustering method and (ii) allows building a
histogram of each image, the histogram of the test im-
ages being compared to the histogram of the trained
image that defines the object. The advantage of such
a strategy is that histogram computation and compar-
ison are fast to process. Our approach is thus appro-
priate for real-time implementations.
5.1 Codebook Learning
The codebook is a set of whitened pixel patches learnt
from small patches extracted within each micro-
image of a training-image set. From a training set
made of the raw light field captures of all the objects
at the closest distance from the plenoptic camera (one
capture per object), we extract n-pixel patches within
each micro-image that contains a large part of the ob-
ject with a defined scanning stride on both axes. For
each training raw image, the set of micro-images is
extracted from the mask defining the presence of a
part of the object. This allows to reduce the noise that
patches belonging to the background can introduce in
the training process.
The resulting set of patches x
(i)
∈ ℜ
n
,i = 1, ..., m,
forms the training vectors. These patches are pre-
processed by removing the mean before a PCA-
whitening. The final codebook is then learnt by alter-
nating K-means clustering and a cluster-merging step:
Algorithm 1: K-means clustering algorithm. K is the num-
ber of clusters, c
i
the center of the i
th
cluster, i = 1, ...,K and
N the number of iterations.
1: Initialize the centers c
i
of the K clusters from the
data
2: Attribute the closest center to each data sample
3: Update each c
i
with the mean of all its belonging
data sample
4: Repeat N times
5.2 Histogram Extraction and
Classification
The codebook is learnt from a set of objects captured
at the closest distance and tested on captures at farther
distances. Once the codebook learnt, we obtained K
centers c
i
∈ ℜ
n
,i = 1,...,K. We then extract a nor-
malized histogram of each object containing as many
bins as centers.
The test phase is applied within a fixed test region
of interest and without any image re-scaling. As a
result, the test ROI is composed of micro-images of
background and part of the object to recognise. Each
n-pixel patch is extracted within each micro-image
of the fixed ROI with strides greater than at training
phase (Figure 7). The patches can then either belong
Real-time Scale-invariant Object Recognition from Light Field Imaging
341
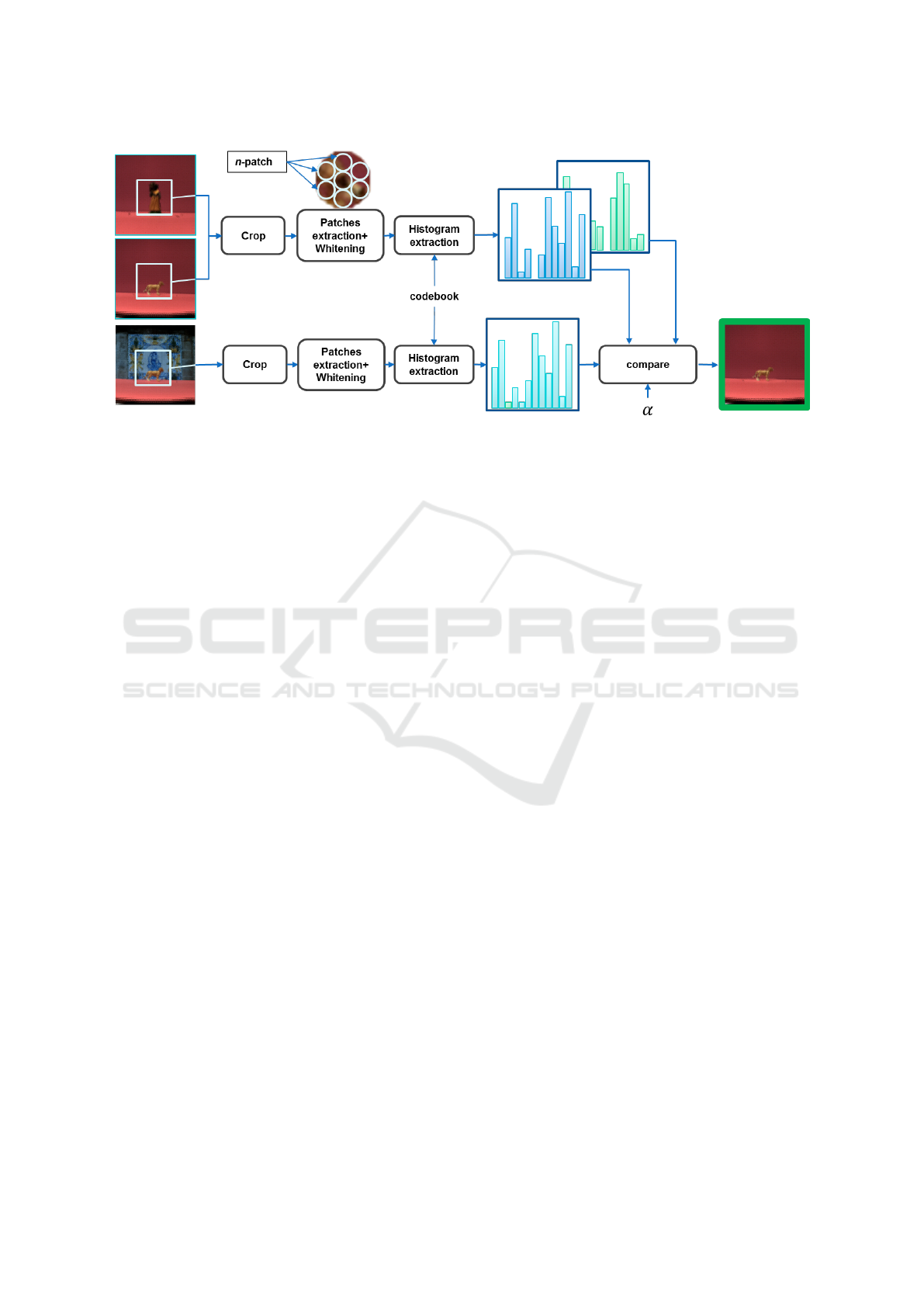
Figure 7: Block diagram of the test scheme. Within a region of interest, each micro-image is used to extract non-overlapping
n-patches. The n-patches are PCA-projected according to the training and attributed the closest K-means cluster for building
the histogram.
to the object or to the background. After being PCA-
whitened, they are attributed a cluster. Each bin of the
histogram represents the number of occurrence of the
corresponding code in the region of interest. For far
object captures, the number of visual words belong-
ing to the object is smaller than for close objects. We
expect the histogram of a test image to have its am-
plitude lower than the one of the training image. We
thus scale up the test histogram and compare it with
the histogram of the training image of the same object
captured at the closest distance. The histograms are
compared by minimizing the following thresholded
L
1
distance,
argmin
α
K
∑
i=1
|H
T
(i) − α ∗ H
t
(i)| (2)
where K is the number of histogram bins, α a scaling
factor, H
T
and H
t
the histogram of respectively the
training image and the test image. The construction
of the histograms and their comparison make our ap-
proach compatible with a real-time implementation,
the execution time being related to the number of K-
mean centers.
6 EXPERIMENTAL RESULTS
We evaluate our scale-invariant object recognition ap-
proach on five objects, one instance from each class
of our light field dataset, CSEM-25, and with a unique
angle. The codebook is trained on the objects located
at 28 cm from the camera with the implementation of
K-means from (Arthur and Vassilvitskii, 2007). The
training set is made of as many images as the num-
ber of objects to recognise i.e. five in our evaluation.
These images are the ones where the background is
uniform and we test on the four subsets, the two firsts
with a uniform background and the two seconds with
random landscape backgrounds. The training sub-
patches are extracted from objects segmented accord-
ing to the mask provided by the dataset. While the
histogram of trained samples is built from the seg-
mented region, the test is applied by extracting the
histogram from a fixed window for all the 21 distances
(from 28 to 50 cm).
For the experiments, we set a number of clusters
to 80 and from 100 to 900, with a step of 200. At
training phase, a sub-patch is discarded from the train-
ing samples when 25 pixels or more belong to the
background. The sub-patch extraction within a micro-
image is done with a stride of 1 pixel over the x-axis
and 2 pixels over the y-axis. The three RGB color
channels are extracted to build the training vectors.
At test phase, the detection window is kept constant
despite the scale change induced by the camera-to-
object distance. We expect the background to intro-
duce noise in the histograms making the recognition
challenging for large distances.
The experimental results are presented in table
1. The values represent the average on the detection
done with the four backgrounds. At the closest dis-
tance, we obtain a recognition rate of 100 %, the back-
ground not having a large impact. Using a fixed-sized
detection window, the farther the objects, the lower
the recognition rate is, due to the noise introduced by
the background that fills an increasing proportion of
the micro-images. With a few number of bins, we ex-
ceed 90 % of correct recognition for each tested dis-
tance, the recognition rate expectedly decreasing with
the distance.
VISAPP 2016 - International Conference on Computer Vision Theory and Applications
342

Table 1: Object recognition on light-field raw images.
Recognition rate for 21 tested distances and various num-
ber of visual words.
Distance
Number of visual words (K)
80 100 200 300 400 500
28 1 1 1 1 1 1
28.6 1 1 1 1 1 1
29.2 1 1 1 1 1 1
29.8 0.95 1 1 1 1 1
30.4 0.95 1 1 1 1 0.95
31.1 0.95 0.95 0.95 0.95 1 0.95
31.9 1 1 1 1 1 0.95
32.7 0.95 1 1 1 0.95 0.95
33.5 0.95 1 1 1 1 0.95
34.4 1 1 1 0.95 0.9 0.9
35.3 1 1 1 0.95 0.9 0.95
36.3 0.95 1 1 1 0.95 0.9
37.4 0.9 1 1 0.95 0.95 0.95
38.6 0.95 1 1 0.9 0.95 0.95
39.8 0.9 0.95 1 0.9 0.9 0.9
41.2 0.95 1 0.75 0.8 0.85 0.85
42.7 0.9 1 0.95 0.8 0.8 0.8
44.3 0.85 0.9 0.95 0.75 0.75 0.7
46 1 1 0.95 0.85 0.8 0.75
47.9 0.95 0.9 0.75 0.65 0.6 0.6
50 1 1 0.8 0.6 0.5 0.45
The results also show an overfitting effect when
building a codebook with too many visual words.
While the recognition rate remains high for distances
close the one of the training set, it drops drastically
for farther distances, the cluster means being depen-
dent on the scale of training set of patches.
For a comparative evaluation of our scale-
invariant object recognition approach, we tested the
corresponding all-in-focus images with a bag-of-
feature-based object classifier. As the invariance in
scale is our main concern, the SIFT features were em-
ployed. After the detection of SIFT keypoints, the
SIFT descriptors belonging to the objects were ex-
tracted from the all-in-focus training images and clus-
tered to get a k-mean codebook that allows the build-
ing of histograms to describe an image. Each all-in-
focus test image histogram was compared to the all-
in-focus training image histograms with the L2-norm.
Figure 8 shows the evaluation results. The experi-
ments were carried out on four and five objects, the
fifth object being the fruit. Indeed, we noticed that
very few keypoints were extracted from the last object
that is not textured enough. The performance of the
BOF-based classifier over the five objects are there-
fore penalized, the fruit not being predictable at test
Figure 8: Comparative results showing the performance of
our method on light-field images (best results with K = 100)
and of a bag-of-feature-based approach on standard 2D im-
ages (best results with K = 60 for 5 objects, BOF-SIFT-5,
and K = 40 for 4 objects, BOF-SIFT-4).
phase due to insufficient number of SIFT features.
Our scale-invariant object classifier outperforms a
2D BOF-based classifier on three situations: (i) when
the distance is known and fixed, (ii) when the scale
varies and (iii) on images where scale-space-based
features can hardly be extracted.
7 CONCLUSION AND FUTURE
WORK
We presented a new approach of scale-invariant ob-
ject recognition from light field images of our new
light field dataset. From our industrial plenoptic cam-
era that has the properties of an extended depth-of-
field and micro-images redundancy with low scale
variance, we built a real-time recognition system that
is robust to large scale variation of almost twice the
size of the object when furthest from the camera.
With a codebook of a few words (100 visual words)
built with a few number of images (one per object
to recognise), we reach a recognition rate greater
than 90 % despite the scale variation, outperform-
ing a bag-of-feature classifier on standard 2D images.
As next steps, we aim at scaling up the system to
recognise more objects and also to classify object by
category. The dataset is available for download at
http://www.csem.ch/csem-25-db.
ACKNOWLEDGEMENTS
The authors thank Pierre-Alain Beuchat, Silvia Marcu
and Elio Abi Karam for their assistance with the ac-
quisition set-up automatization, Dr. Amina Chebira
for the constructive discussions on the algorithms and
Real-time Scale-invariant Object Recognition from Light Field Imaging
343

Dr. Guido Bologna for his helpful guidance in the
project. This work is supported by the Swiss Hasler
Foundation SmartWorld Program, grant Nr. 11083.
REFERENCES
Adelson, E. H. and Bergen, J. R. (1991). The plenoptic
function and the elements of early vision. Computa-
tional models of visual processing, 1(2):2–20.
Arthur, D. and Vassilvitskii, S. (2007). k-means++:
the advantages of careful seeding. In Proceed-
ings of the Eighteenth Annual ACM-SIAM Symposium
on Discrete Algorithms, SODA 2007, New Orleans,
Louisiana, USA, January 7-9, 2007, pages 1027–
1035.
Bolles, R. C., Baker, H. H., and Marimont, D. H. (1987).
Epipolar-plane image analysis: An approach to deter-
mining structure from motion. International Journal
of Computer Vision, 1(1):7–55.
Cho, D., Kim, S., and Tai, Y.-W. (2014). Consistent mat-
ting for light field images. In Computer Vision–ECCV
2014, pages 90–104. Springer.
Cloix, S., Weiss, V., Bologna, G., Pun, T., and Hasler, D.
(2014). Obstacle and planar object detection using
sparse 3d information for a smart walker. In VISAPP
(2)’14, pages 292–298.
Coates, A., Karpathy, A., and Ng, A. Y. (2012). Emer-
gence of object-selective features in unsupervised fea-
ture learning. In Pereira, F., Burges, C., Bottou, L.,
and Weinberger, K., editors, Advances in Neural In-
formation Processing Systems 25, pages 2681–2689.
Curran Associates, Inc.
Csurka, G., Dance, C. R., Fan, L., Willamowski, J., and
Bray, C. (2004). Visual categorization with bags of
keypoints. In In Workshop on Statistical Learning in
Computer Vision, ECCV, pages 1–22.
Everingham, M., Eslami, S., Van Gool, L., Williams, C.,
Winn, J., and Zisserman, A. (2015). The pascal vi-
sual object classes challenge: A retrospective. Inter-
national Journal of Computer Vision, 111(1):98–136.
Gavrila, D. M. and Munder, S. (2006). Multi-cue Pedestrian
Detection and Tracking from a Moving Vehicle. Inter-
national Journal of Computer Vision, 73(1):41–59.
Georgiev, T. G. and Lumsdaine, A. (2009). Resolution in
plenoptic cameras. In Computational Optical Sensing
and Imaging, page CTuB3. Optical Society of Amer-
ica.
Ghasemi, A., Afonso, N. J., and Vetterli, M. (2014). LCAV-
31: a dataset for light field object recognition. In Pro-
ceedings of the SPIE, volume 9020, San Francisco,
California, USA. International Society for Optics and
Photonics.
Ghasemi, A. and Vetterli, M. (2014). Scale-invariant repre-
sentation of light field images for object recognition
and tracking. In Proceedings of the SPIE, volume
9020 of Proceedings of SPIE, San Francisco, Califor-
nia, USA. International Society for Optics and Pho-
tonics.
Helmer, S. and Lowe, D. (2010). Using stereo for ob-
ject recognition. In Robotics and Automation (ICRA),
2010 IEEE International Conference on, pages 3121–
3127.
Joshi, N., Matusik, W., and Avidan, S. (2006). Natu-
ral video matting using camera arrays. ACM Trans.
Graph., 25(3):779–786.
Kim, C., Zimmer, H., Pritch, Y., Sorkine-Hornung, A., and
Gross, M. H. (2013). Scene reconstruction from high
spatio-angular resolution light fields. ACM Trans.
Graph., 32(4):73.
Levoy, M. (2011). The (old) stanford light fields archive.
http://graphics.stanford.edu/software/lightpack/lifs.html.
[Online, accessed 30-March-2015].
Ng, R. (2005). Fourier slice photography. In ACM Transac-
tions on Graphics (TOG), volume 24, pages 735–744.
ACM.
Perwass, C. and Wietzke, L. (2012). Single lens 3d-camera
with extended depth-of-field. In IS&T/SPIE Elec-
tronic Imaging, pages 829108–829108. International
Society for Optics and Photonics.
Wanner, S., Meister, S., and Goldluecke, B. (2013).
Datasets and benchmarks for densely sampled 4d light
fields. In Vision, Modelling and Visualization (VMV).
Wetzstein, G. Synthetic light field archive. http://web. me-
dia.mit.edu/gordonw/SyntheticLightFields/index.php.
[Online, accessed 30-March-2015].
Wilburn, B., Joshi, N., Vaish, V., Talvala, E.-V., Antunez,
E., Barth, A., Adams, A., Horowitz, M., and Levoy,
M. (2005). High performance imaging using large
camera arrays. ACM Trans. Graph., 24(3):765–776.
Zobel, M., Fritz, M., and Scholz, I. (2002). Object track-
ing and pose estimation using light-field object mod-
els. In Proceedings of the Vision, Modeling, and Vi-
sualization Conference 2002 (VMV 2002), Erlangen,
Germany, November 20-22, 2002, pages 371–378.
VISAPP 2016 - International Conference on Computer Vision Theory and Applications
344
