
Superpixels in Pedestrian Detection from Stereo Images in
Urban Traffic Scenarios
Ion Giosan and Sergiu Nedevschi
Computer Science Department, Technical University of Cluj-Napoca, Cluj-Napoca, Romania
Keywords: Superpixels, Pedestrian Hypotheses, HOG Features, PCA, SVM, AdaBoost, Hypotheses Validation,
Speed-up Detection.
Abstract: Pedestrian detection is a common task in every driving assistance system. The main goal resides in obtaining
a high accuracy detection in a reasonable amount of processing time. This paper proposes a novel method for
superpixel-based pedestrian hypotheses generation and their validation through feature classification. We
analyze the possibility of using superpixels in pedestrian detection by investigating both the execution time
and the accuracy of the results. Urban traffic images are acquired by a stereo-cameras system. A multi-feature
superpixels-based method is used for obstacles segmentation and pedestrian hypotheses selection. Histogram
of Oriented Gradients features are extracted both on the raw 2D intensity image and also on the superpixels
mean intensity image for each hypothesis. Principal Component Analysis is also employed for selecting the
relevant features. Support Vector Machine and AdaBoost classifiers are trained on: initial features and
selected features extracted from both raw 2D intensity image and mean superpixels intensity image. The
comparative results show that superpixels- based pedestrian detection clearly reduce the execution time while
the quality of the results is just slightly decreased.
1 INTRODUCTION
The high rate of road accidents in the world has
motivated the development of more efficient driving
assistance systems in order to reduce the number of
accidents with injuries and fatalities. The driving
assistance systems that have implemented functions
like obstacle detection and obstacle recognition
should be robust in various traffic and weather
conditions. Although highway traffic scenes are
relatively simple mainly containing obstacles such as
cars, fences and poles, urban traffic scenarios are
much more complex. In urban traffic scenarios
several problems occur due to the crowded scenes in
which occlusions occur frequently and makes the
obstacle detection problem very difficult. Here the
pedestrians, which are the most vulnerable traffic
participants, appear.
Although pedestrian recognition is a simple
problem for humans, it is a relatively difficult
problem for artificial vision systems. This is mainly
due to the different possible traffic situations,
different clothing and accessories they wear. Usually,
the pedestrians are recognized in traffic scenes by
using obstacles classifiers trained on specific features.
Stereo-cameras are frequently used in computer
vision at the expense of other sensors. We use a
solution consisting of a gray level stereo-cameras
setup that offers the possibility of exploiting both the
2D intensity and the associated 3D points’
information.
A very important and motivating aspect for
driving assistance systems is that all the processing
must be done as quickly as possible in order to
achieve real-time execution. This is particularly
important because it must give a timely response at
high speeds of ego-vehicle. The obstacle detection
and recognition algorithms must be complex in order
to robustly solve problems but they must be very fast
for delivering timely results. These two requirements,
that are in a continuous compromise, must be met
both as much as possible.
We proposed a novel generation and validation of
pedestrian hypotheses based on superpixels. The goal
resides in reducing the processing time for pedestrian
detection while preserving the accuracy of the results.
We use our previous work in superpixels-based
obstacle segmentation (Giosan and Nedevschi, 2014)
in order to accurately determine the traffic pedestrian
hypotheses. Classic features like Histogram of
Giosan, I. and Nedevschi, S.
Superpixels in Pedestrian Detection from Stereo Images in Urban Traffic Scenarios.
DOI: 10.5220/0005680305010508
In Proceedings of the 11th Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2016) - Volume 4: VISAPP, pages 501-508
ISBN: 978-989-758-175-5
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
501

Oriented Gradients (HOG) are computed both on the
raw 2D intensity image and also on the superpixels
mean image for comparison purposes. Principal
Component Analysis (PCA) is also employed for
feature dimensionality reduction. Traditional
classifiers like Support Vector Machine (SVM) and
AdaBoost are trained and tested in order to prove that
using superpixels for hypotheses validation can
strongly reduce the processing time while the quality
of the pedestrian detection results is not so affected.
The rest of the paper is organized as follows: in
section 2 we present the related work, in section 3 the
system overview, in section 4 the superpixel-based
pedestrian hypotheses detection, in section 5 the
extracted features and the classifiers that are used, in
section 6 the experimental results and finally in
section 7 we draw the conclusions of this work.
2 RELATED WORK
Superpixels are clusters of pixels based on local
image features. SLIC superpixels described in
(Achanta et al., 2012) represent a fast approach that
can be used for segmenting gray levels images in
separate superpixels. They may be used for reducing
the complexity of subsequent image processing tasks
like obstacle detection. Pedestrian hypotheses are
usually extracted from the set of detected obstacles by
imposing some pedestrian specific geometrical
constraints. The hypotheses are then used for
reducing the search space, resulting in a faster
pedestrian detection process.
Usually stereovision based approaches are widely
used first in traffic scenes obstacle segmentation
(Oniga and Nedevschi, 2010) and second for
validating the obstacle classification results (Bertozzi
et al., 2008). Features extraction and feature-based
classifiers represent intermediate steps in obstacles
classification. Features are usually extracted from the
2D appearance obstacle images but they can also
integrate depth information and optical flow motion
information. Obstacle classifiers may be trained
directly on the extracted features or on a subset of
relevant features (You and Ruichek, 2012). A high
quality of the stereo-reconstruction process (Pantilie
and Nedevschi, 2012) is absolutely necessary for
obtaining a dense and accurate 3D points map. Based
on this map, several algorithms like points grouping
(Pocol et al., 2008) or density map analysis
(Nedevschi et al., 2009) may be used for obstacle
segmentation. In comparison with monocular vision
based techniques that uses symmetry (Bertozzi et al.,
2000), edges (Bertozzi and Broggi, 1998) and
textures (Heikkila and Pietikainen, 2006) from
intensity information, stereovision based obstacle
segmentation approaches (Broggi et al., 2011,
Nedevschi et al., 2004, Llorca et al., 2012) are clearly
superior.
Methods that divide the image pixels into regions
having the properties that all pixels from a separate
region are similar with respect to a chosen similarity
metric are presented in (Felzenszwalb and
Huttenlocher, 2004) and (Xiaofeng and Malik, 2003).
A graph where the nodes are the image pixels and the
edges represent a neighborhood relationship between
pixels is computed. These methods represent the basis
of the, nowadays very common and superior,
superpixels based image segmentation approaches. In
(Giosan and Nedevschi, 2014) we proposed a novel
obstacle detection method based on the original scene
segmentation in superpixels. The method combined
the intensity, depth and motion information within the
SLIC superpixels. A novel algorithm was proposed
for superpixels clustering into obstacles and obstacles
refinement. A method for very close obstacles
separation was developed based on the motion
vectors analysis of their component superpixels. The
results showed a very good obstacles detection with
precise segmentation of their surfaces which is
particularly useful for subsequent processes like
pedestrian detection. Continuing this work, in this
paper we propose a novel method for superpixels-
based generation and validation of pedestrian
hypotheses. The superpixels benefits in the pedestrian
detection process are clearly highlighted.
In the literature, several methods use different
discriminant features like shapes and edges (Broggi
et al., 2000), contours (Hilario et al., 2005), contour
templates (Gavrila and Philomin, 1999; Gavrila,
2000; Giosan and Nedevschi, 2009), symmetries
(Havasi et al., 2004), Haar features (Papageorgiou
and Poggio, 2000), HOG features (Dalal and Triggs,
2005) used for pedestrian detection. Usually these
features are firstly extracted on pedestrian hypotheses
and then fed into classifiers that are able to distinguish
between pedestrians and other traffic scene obstacles.
A lot of different methods exist for feature based
obstacle and specifically pedestrian classification
(Giosan and Nedevschi, 2012). In (Rivlin et al., 2002,
Lun et al., 2007), a SVM classifier is used for
recognizing pedestrians and bikes in traffic scenes. A
powerful Adaboost classifier built upon some
characteristics of rectangular edge description is
proposed in (Yi et al., 2010) for high accuracy
pedestrian recognition. Neural networks are also used
for high-accuracy pedestrian and other obstacles
classification (Toth and Aach, 2003). The state of the
VISAPP 2016 - International Conference on Computer Vision Theory and Applications
502
art in pedestrian detection achieve high accuracy
results even from monocular images (Benenson et al.,
2012). The benefits of stereo images in regions of
interest generation and localization and an evaluation
methodology of pedestrian detection is described in
(Keller et al., 2011).
3 SUPERPIXELS BASED
PEDESTRIAN DETECTION
SYSTEM OVERVIEW
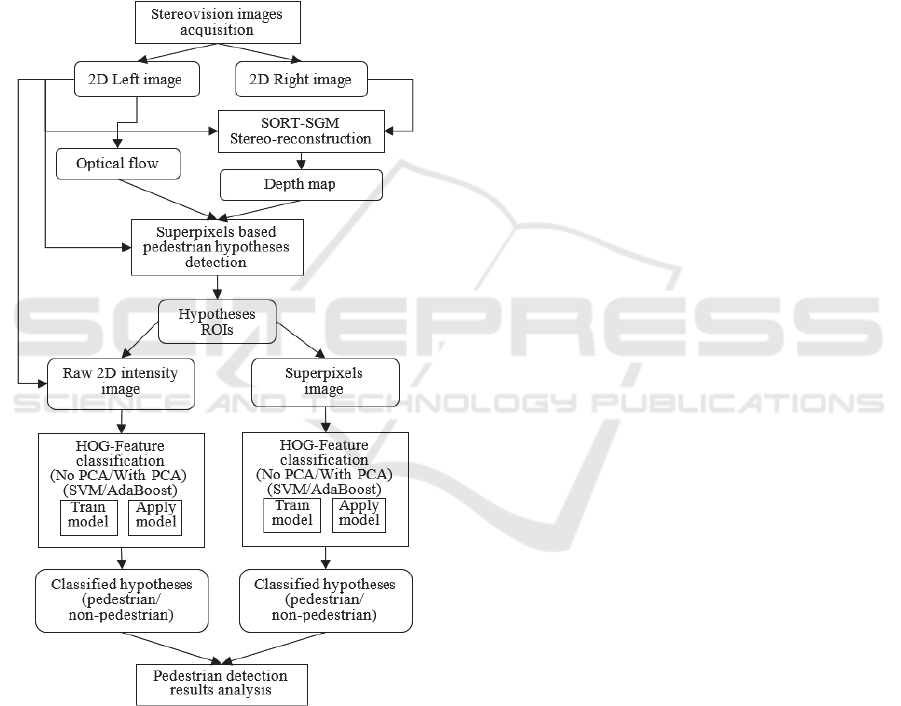
Figure 1: Superpixels-based pedestrian detection system
overview.
The structural architecture of the entire system
and the flow between its modules that is used for
analyzing the influence of superpixels in pedestrian
detection from urban traffic scenes is presented in
Figure 1.
Traffic scenes images are acquired with a
stereovision cameras setup. These consist of
grayscale image sequences with resolution of
512x383 pixels. The stereo-reconstruction process is
achieved by the SORT-SGM algorithm (Pantilie and
Nedevschi, 2012) which offers an accurate and dense
depth map, crucial for further processing steps.
Optical flow is computed by using the Lukas-Kanade
approach on good features to track (Shi and Tomasi,
1994). Combining intensity, depth and optical flow
information, our superpixels based obstacle detector
(Giosan and Nedevschi, 2014) is used for selecting
the pedestrian hypotheses. HOG features are
extracted both directly on raw 2D and on the
superpixels hypotheses intensity ROI images. PCA
procedure is or not applied before training two robust
classifiers: SVM and AdaBoost. These classifiers are
trained on a database containing pedestrians and non-
pedestrians instances. Finally, the classification
results from all investigated ways are analyzed and
the benefits of using superpixels for pedestrian
detection are highlighted.
4 SUPERPIXELS-BASED
PEDESTRIAN HYPOTHESES
DETECTION
We take advantage of our previous work (Giosan and
Nedevschi, 2014) for superpixels based obstacle
detection. SLIC superpixels are computed in a
rectangular region of interest (ROI) defined by the
positions and dimensions: (left=0, top=100,
right=512, bottom=320) (see Figura). A fixed number
of N=2000 superpixels segments the established
intensity image ROI. A set of intensity, depth and
motion features are used in order to cluster the
superpixels into scene obstacles (see Figurb).
A modified version of the novel obstacle detection
algorithm described by us in (Giosan and Nedevschi,
2014) is proposed for finding only the pedestrian
hypotheses that will be further used in the validation
(pedestrian detection) process. The algorithm has five
main steps, the last one addressing directly the
pedestrian hypotheses selection from the traffic scene
segmented obstacles:
Gray-levels SLIC superpixels computation
Superpixels specific features extraction
Superpixels clustering in obstacles hypotheses
Obstacles hypotheses validation and refinement
Pedestrian hypotheses generation
Superpixels in Pedestrian Detection from Stereo Images in Urban Traffic Scenarios
503

a)
b)
Figure 2: Obstacles detection: a) intensity image ROI; b)
corresponding superpixels-based detected obstacles (with
random color for each obstacle).
Pedestrian hypotheses are considered to be those
superpixels-based obstacles that meet some
geometrical constraints. We define the following
constraints for the surrounding 3D cuboid that are
satisfied for the majority of pedestrians:
Height between 1.5m and 2.2m
Width between 0.3m and 0.9m
Length between 0.3m and 0.9m
2D image ROI aspect ratio (height/width)
between 1.0 and 4.0
Figure 3: Superpixels-based pedestrian hypotheses (with
random color for each obstacle).
In case of traffic scene image presented in Figure
2, the generated superpixel-based pedestrian
hypotheses are shown in Figure 3.
5 HOG FEATURES
EXTRACTION, SELECTION
AND CLASSIFIERS TRAINING
We choose the HOG features for analyzing the
influence of superpixels in the pedestrian detection
(hypotheses validation) process. These features are
extracted both on the raw 2D intensity ROIs and on
the superpixels ROIs of the pedestrian hypotheses. A
PCA feature dimensionality reduction method is also
investigated in speeding up the final classification
while preserving the accuracy. Different classifiers
are trained both on the entire HOG features set and on
PCA selected features. The features are extracted on
a training set with pedestrians and non-pedestrians
intensity images.
The raw 2D intensity image ROIs (see Figure 4a)
of the pedestrian hypotheses are firstly resized to a
fixed dimension of 64x128 pixels using a fast bilinear
interpolation procedure (see Figure 4b). The resized
image is divided in blocks with 16x16 pixels and each
block in 8x8 pixels cells. We choose 9 bins for the
HOG computation. The resulting HOG feature vector
for each instance has a number of 3780 components.
a) b) c) d)
Figure 4: Pedestrian hypotheses: a) raw 2D intensity ROI;
b) resized 2D intensity ROI; c) superpixels on resized 2D
intensity ROI; d) mean superpixels image.
We choose a SVM and an AdaBoost classifier
trained using several feature vectors extracted for
pedestrians and non-pedestrians. We also reduce the
number of features by keeping only the first 30
principal components out of all 3780 initial features
and retrain the previously mentioned classifiers.
In order to investigate the possible advantages of
using superpixels in pedestrian detection, we reduce
VISAPP 2016 - International Conference on Computer Vision Theory and Applications
504

the raw 2D intensity ROIs by resizing it to 16x32
pixels and extract the SLIC superpixels (see Figure
4c). We compute the mean superpixels image (see
Figure 4d) by averaging all the intensities at every
superpixel level. HOG features are extracted, using
the same block size, cell size and number of bins, on
the superpixels mean image resulting in a 108 feature
vector. Identically to the training process on the raw
features previously described, SVM and AdaBoost
classifiers are trained first on several instances with
all 108 feature vectors and then by selecting only the
first 30 principal components.
The classification performance and the processing
time obtained by the SVM and AdaBoost classifiers
trained on extracted HOG features on initial image
and on superpixels mean image, with and without
PCA are presented comparatively in the Experimental
Results section.
6 EXPERIMENTAL RESULTS
In this section we describe the obtained results for
both generation and validation of pedestrian
hypotheses. We also highlight the advantages and
disadvantages of using superpixels.
Pedestrian hypotheses generation was tested on
image sequences from common urban traffic
scenarios, where the results seems to be similar to
those obtained by other obstacle detection methods.
In difficult traffic scenarios with crowded and
hanging obstacles, the superpixels-based pedestrian
hypotheses generation is clearly superior. A
comparison of our method with the pedestrian
hypotheses generation approach based on 3D points
grouping (Pocol et al., 2008) and density maps
(Nedevschi et al., 2009) is presented in Figure. The
superpixels-based proposed method offers better
hypotheses generation, reducing the number of false
detections. It also provides better shape definition
which is very important for further validation in the
pedestrian detection process.
In the evaluation of the pedestrian hypotheses
validation process, we use obstacles instances from
our own database containing about 25,000 intensity
images of pedestrians and another 25,000 intensity
images of non-pedestrians (see Figure).
We trained two classifiers: SVM with RBF
kernels and AdaBoost with decision stumps weak
learners. All the training procedures were conducted
by using a number of maximum 5000 instances
selected randomly from our database. The same
number of other instances is also selected randomly
and used for evaluating the classification accuracy.
The processing time is also counted for each
experiment.
a)
b)
Figure 5: Pedestrian hypotheses generation: a) by means of
3D points grouping and density maps (pedestrians from the
left and right side are wrongly grouped together); b) using
the proposed superpixels-based method (pedestrians from
the left and right side are clearly separated).
Figure 6: Sample dataset images: pedestrians and non-
pedestrians.
The SVM classifier performance obtained in all
four proposed scenarios
I: no superpixels, no PCA
II: with superpixels, no PCA
III: no superpixels, with PCA
IV: with superpixels, with PCA
are briefly presented in Table 1.
Table 1: SVM Classifier’s Performance.
Scenario
Number of
test instances
False Positive
Rate
True
Positive
Rate
Processing
time (ms)
I 5000 0.044 0.937 58298
II 5000 0.078 0.898 6499
III 5000 0.056 0.91 5310
IV 5000 0.081 0.868 5605
Superpixels in Pedestrian Detection from Stereo Images in Urban Traffic Scenarios
505
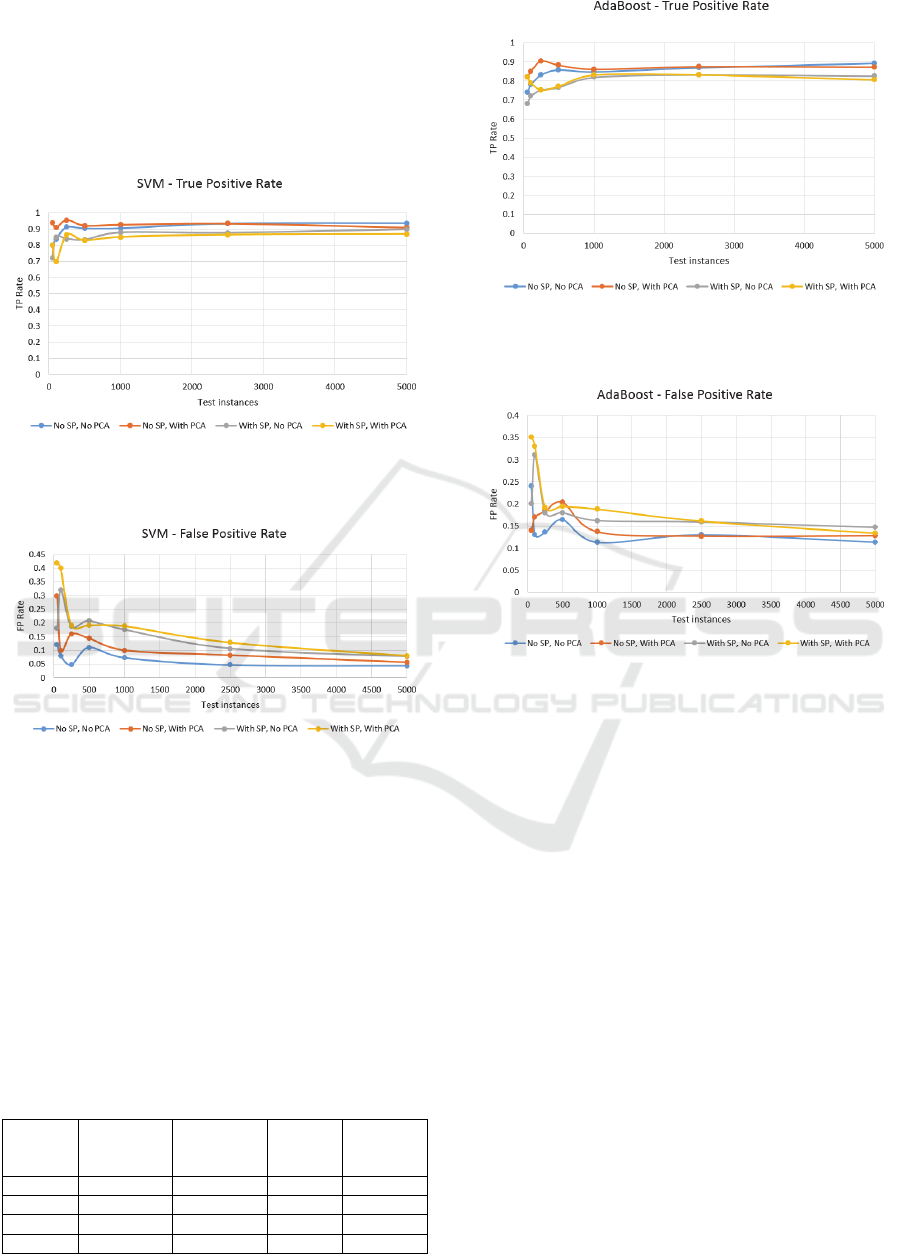
Plotting the false positive rates and true positive
rates for pedestrian detection in all four proposed
training/testing scenarios show that there is small
decrease in true positive rates of about 4% (see Figure
7) with a small increase in false positive rates of about
3% (see Figure 8
Figure) when considering superpixels
mean image versus raw image processing.
Figure 7: SVM classifier pedestrian detection true positive
rates in all four scenarios: with/without superpixels (SP),
with/without PCA.
Figure 8: SVM classifier pedestrian detection false positive
rates in all four scenarios: with/without superpixels (SP),
with/without PCA.
The main advantage is depicted in Figure where
the processing time interval seems to be very short
(decreased with about 90%) when processing PCA
superpixels images versus raw intensity images in
pedestrian detection.
The same procedures like in the SVM classifier are
applied for training and testing the AdaBoost
classifier. The AdaBoost classifier performance
obtained in the same four proposed scenarios are
briefly presented in Table 2.
Table 2: AdaBoost Classifier’s Performance.
Scenario
Number of
test instances
False Positive
Rate
True
Positive
Rate
Processing
time (ms)
I 5000 0.1136 0.893 7544
II 5000 0.147 0.826 5090
III 5000 0.128 0.872 8660
IV 5000 0.134 0.806 4055
Figure 9: AdaBoost classifier pedestrian detection true
positive rates in all four scenarios: with/without superpixels
(SP), with/without PCA.
Figure 10: AdaBoost classifier pedestrian detection false
positive rates in all four scenarios: with/without superpixels
(SP), with/without PCA.
As in the case of SVM classifier, using the
AdaBoost classifier in all four proposed
training/testing scenarios show that there is small
decrease in true positive rates of about 6% (see Figure
9) with a small increase in false positive rates of about
3% (see Figure 10) when considering superpixels
mean image versus raw image processing. The main
advantage is depicted in Figure 11 where the
processing time seems to be shorter (with about 40%)
when processing PCA superpixels images versus raw
intensity images for pedestrian detection.
The experimental results were obtained by
processing images containing pedestrians and non-
pedestrians acquired from different traffic scenarios.
The initial superpixels-based obstacle segmentation
process was performed by our own novel proposed
algorithms previously published in (Giosan and
Nedevschi, 2014). Generation and validation of
pedestrian hypotheses were achieved by the novel
described methods in this paper. The system achieves
real-time performance running on a single core of an
Intel Core i7-4790 processor @ 3.60 GHz.
VISAPP 2016 - International Conference on Computer Vision Theory and Applications
506
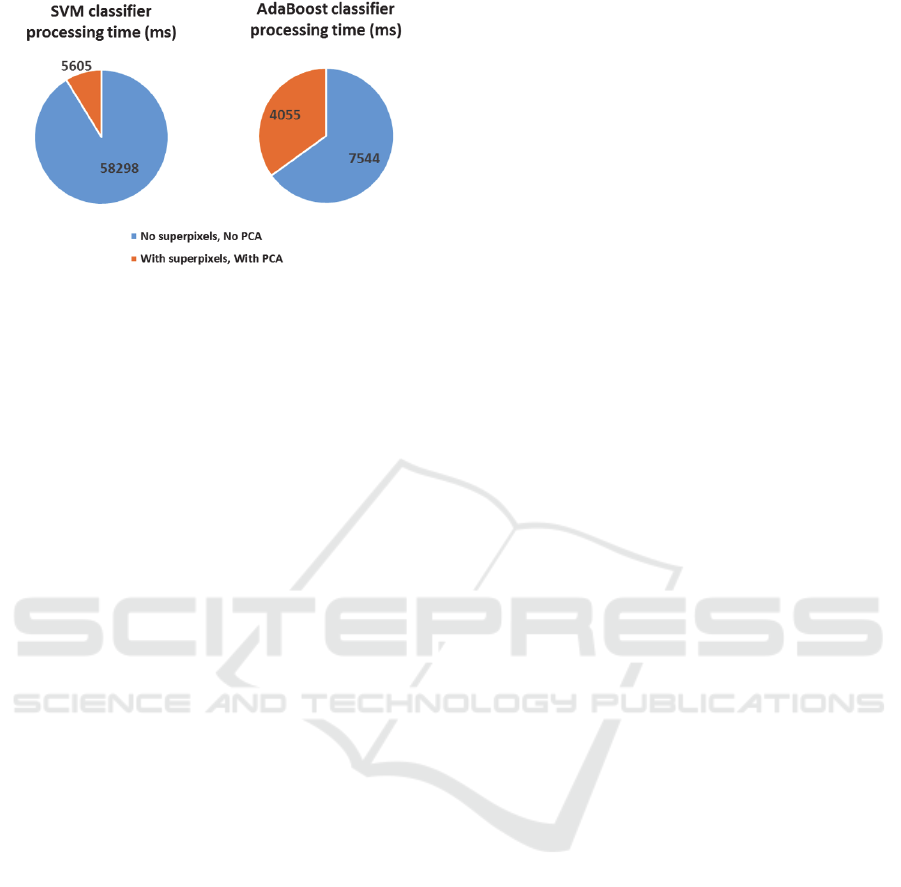
Figure 11: SVM and AdaBoost classifiers processing time:
comparison between the extreme scenarios I and IV.
7 CONCLUSIONS
A novel approach for superpixel-based generation
and validation of pedestrian hypotheses was
described. The proposed superpixels-based
pedestrian hypotheses generation method offers
better hypotheses generation results even in difficult
traffic scenarios. It clearly reduces the number of
false hypotheses detections and provides better
pedestrians shape definition. The influence of using
superpixels in pedestrian detection (hypotheses
validation) was also investigated. Classical HOG
features were computed both on the raw 2D intensity
image and also on the superpixels mean image. PCA
feature dimensionality reduction was also employed
for speeding up the classification process while trying
to preserve the accuracy. SVM and AdaBoost
classifiers were trained and tested on random
pedestrian/non-pedestrian intensity images. Their
classification results were compared in terms of both
accuracy and also in terms of processing time
interval.
The SVM classification proved that the
processing time interval may be decreased with 90%
when using superpixels, while the accuracy lost only
3% in false positive rate. The AdaBoost classification
proved that the processing time may be decreased
with 40% when using superpixels while the accuracy
lost also only 3% in false positive rate. The
superpixels usage clearly improves the quality of the
pedestrian hypotheses generation. Hypotheses
validation (pedestrian detection) shows a significant
decrease of the processing time while the small loss
in accuracy can be neglected.
REFERENCES
Achanta, R., Shaji, A., Smith, K., Lucchi, A., Fua, P. &
Susstrunk, S. 2012. SLIC Superpixels Compared to
State-of-the-Art Superpixel Methods. IEEE
Transactions on Pattern Analysis and Machine
Intelligence, 34, pp. 2274-2282.
Benenson, R., Mathias, M., Timofte, R. & Van Gool, L.
2012. Pedestrian detection at 100 frames per second.
IEEE Conference on Computer Vision and Pattern
Recognition (CVPR). pp. 2903-2910.
Bertozzi, M., Bombini, L., Cerri, P., Medici, P., Antonello,
P. C. & Miglietta, M. 2008. Obstacle detection and
classification fusing radar and vision. IEEE Intelligent
Vehicles Symposium. pp. 608-613.
Bertozzi, M. & Broggi, A. 1998. GOLD: a parallel real-time
stereo vision system for generic obstacle and lane
detection. IEEE Transactions on Image Processing, 7,
pp. 62-81.
Bertozzi, M., Broggi, A., Fascioli, A. & Nichele, S. 2000.
Stereo vision-based vehicle detection. Proceedings of
the IEEE Intelligent Vehicles Symposium. pp. 39-44.
Broggi, A., Bertozzi, M., Fascioli, A. & Sechi, M. 2000.
Shape-based pedestrian detection. IEEE Intelligent
Vehicles Symposium. pp. 215-220.
Broggi, A., Buzzoni, M., Felisa, M. & Zani, P. 2011. Stereo
obstacle detection in challenging environments: The
VIAC experience. International Conference on
Intelligent Robots and Systems (IROS). pp. 1599-1604.
Dalal, N. & Triggs, B. 2005. Histograms of oriented
gradients for human detection. IEEE Computer Society
Conference on Computer Vision and Pattern
Recognition. pp. 886-893 vol. 1.
Felzenszwalb, P. F. & Huttenlocher, D. P. 2004. Efficient
Graph-Based Image Segmentation. International
Journal of Computer Vision, 59, pp. 167-181.
Gavrila, D. 2000. Pedestrian Detection from a Moving
Vehicle. Proceedings of the 6th European Conference
on Computer Vision-Part II, pp. 37-49.
Gavrila, D. M. & Philomin, V. 1999. Real-time object
detection for "smart" vehicles. Proceedings of the
Seventh IEEE International Conference on Computer
Vision. pp. 87-93 vol.1.
Giosan, I. & Nedevschi, S. 2009. Building Pedestrian
Contour Hierarchies for Improving Detection in Traffic
Scenes. Computer Vision and Graphics - Lecture Notes
in Computer Science, pp. 154-163.
Giosan, I. & Nedevschi, S. 2012. A solution for
probabilistic inference and tracking of obstacles
classification in urban traffic scenarios. IEEE
International Conference on Intelligent Computer
Communication and Processing (ICCP). pp. 221-227.
Giosan, I. & Nedevschi, S. 2014. Superpixel-based obstacle
segmentation from dense stereo urban traffic scenarios
using intensity, depth and optical flow information.
IEEE 17th International Conference on Intelligent
Transportation Systems (ITSC). pp. 1662-1668.
Havasi, L., Szlavik, Z. & Sziranyi, T. 2004. Pedestrian
Detection Using Derived Third-Order Symmetry of
Legs. Proceedings of the IEEE International
Superpixels in Pedestrian Detection from Stereo Images in Urban Traffic Scenarios
507

Conference on Computer Vision and Graphics, pp. 11-
17.
Heikkila, M. & Pietikainen, M. 2006. A Texture-Based
Method for Modeling the Background and Detecting
Moving Objects. IEEE Transactions on Pattern
Analysis and Machine Intelligence, 28, pp. 657-662.
Hilario, C., Collado, J. M., Armingol, J. M. & Escalera, A.
D. L. 2005. Pedestrian detection for intelligent vehicles
based on active contour models and stereo vision.
Proceedings of the 10th international conference on
Computer Aided Systems Theory, pp. 537-542.
Keller, C. G., Enzweiler, M. & Gavrila, D. M. 2011. A new
benchmark for stereo-based pedestrian detection. IEEE
Intelligent Vehicles Symposium (IV). pp. 691-696.
Llorca, D. F., Sotelo, M. A., Hellín, A. M., Orellana, A.,
Gavilan, M., Daza, I. G. & Lorente, A. G. 2012. Stereo
regions-of-interest selection for pedestrian protection:
A survey. Transportation research part C: emerging
technologies, 25, pp. 226-237.
Lun, Z., Li, S. Z., Xiaotong, Y. & Shiming, X., 2007. Real-
time Object Classification in Video Surveillance Based
on Appearance Learning. IEEE Conference on
Computer Vision and Pattern Recognition. pp. 1-8.
Nedevschi, S., Bota, S. & Tomiuc, C., 2009. Stereo-Based
Pedestrian Detection for Collision-Avoidance
Applications. IEEE Transactions on Intelligent
Transportation Systems, 10, pp. 380-391.
Nedevschi, S., Danescu, R., Frentiu, D., Marita, T., Oniga,
F., Pocol, C., Schmidt, R. & Graf, T. 2004. High
accuracy stereo vision system for far distance obstacle
detection. IEEE Intelligent Vehicles Symposium. pp.
292-297.
Oniga, F. & Nedevschi, S. 2010. Processing Dense Stereo
Data Using Elevation Maps: Road Surface, Traffic Isle,
and Obstacle Detection. IEEE Transactions on
Vehicular Technology, 59, pp. 1172-1182.
Pantilie, C. D. & Nedevschi, S. 2012. SORT-SGM:
Subpixel Optimized Real-Time Semiglobal Matching
for Intelligent Vehicles. IEEE Transactions on
Vehicular Technology, 61, pp. 1032-1042.
Papageorgiou, C. & Poggio, T. 2000. A Trainable System
for Object Detection. International Journal of
Computer Vision, 38, pp. 15-33.
Pocol, C., Nedevschi, S. & Meinecke, M. M. 2008.
Obstacle Detection Based on Dense Stereovision for
Urban ACC Systems. International Workshop on
Intelligent Transportation (WIT), Hamburg, Germany.
pp. 13-18.
Rivlin, E., Rudzsky, M., Goldenberg, R., Bogomolov, U. &
Lepchev, S. 2002. A real-time system for classification
of moving objects. 16th International Conference on
Pattern Recognition. pp. 688-691 vol.3.
Shi, J. & Tomasi, C. 1994. Good features to track. IEEE
Conference on Computer Vision and Pattern
Recognition. pp. 593-600.
Toth, D. & Aach, T. 2003. Detection and recognition of
moving objects using statistical motion detection and
Fourier descriptors. 12th International Conference on
Image Analysis and Processing. pp. 430-435.
Xiaofeng, R. & Malik, J. 2003. Learning a classification
model for segmentation. Proceedings of IEEE
International Conference on Computer Vision. pp. 10-
17 vol.1.
Yi, T., Wei-Ming, L. & Wu, J. 2010. An improved
pedestrian detection algorithm based on Adaboost
cascading stucture. Proceedings of World Congress on
Intelligent Control and Automation (WCICA). pp.
6321-6326.
You, L. & Ruichek, Y. 2012. Moving objects detection and
recognition using sparse spatial information in urban
environments. IEEE Intelligent Vehicles Symposium.
pp. 1060-1065.
VISAPP 2016 - International Conference on Computer Vision Theory and Applications
508
