
Thumbs-Up
Wearable Sensing Device for Detecting Hand-to-Mouth Compulsive Habits
Asaph Azaria, Brian Mayton and Joseph Paradiso
Media Lab, Massachusetts Institute of Technology, 75 Amherst st, Cambridge, MA, U.S.A.
Keywords:
Biomedical Computing, Bioimpedance, Sensor Applications, Artificial Intelligence, Wearable Computers.
Abstract:
Thumbs-Up explores a novel sensing method for detection of hand-to-mouth compulsive habits. Using elec-
trical bio-impedance spectroscopy and inertial measurement units, a prototype system was implemented. The
system can easily be worn around the arm and may perhaps be integrated into future wearable devices. It
recognises occurrences of the habits in real-time, allowing monitoring and immediate interventions. These
have so far been very limited, impeding behavioural studies and the development of therapeutic treatments.
Throughout this paper the method’s feasibility is demonstrated and aspects of its performance are explored.
We present an approach to process the bio-impedance signals and associate them with possible body postures.
A positioning strategy optimises the device’s sensitivity and increases its efficacy. Machine learning algo-
rithms are leveraged to infer the hand-to-mouth detection. We achieve 92% detection accuracy for recurrent
usage and 90% accuracy for users that have not been previously encountered.
1 INTRODUCTION
Hand-to-mouth compulsive habits, such as thumb
sucking and nail biting, are surprisingly common.
Studies found that 28-33% of children, 44% of ado-
lescents, and 19-29% of young adults engage in nail
biting alone (Tanaka et al., 2008). These compulsive
behaviours expose those who exhibit them to multi-
ple health risks. Threats range from expedited trans-
mission of diseases, to dental malocclusion and even
abnormal facial development (Baydas¸ et al., 2007).
Studies into the roots of these habits and their
consequences have so far been limited to either sub-
jective reports or lab settings. Treatment has been
constrained to retrospective correction, relying on
self awareness and manual monitoring (Azrin and
Nunn, 1973). A wearable device, detecting hand-to-
mouth habits in real-time, would mitigate these im-
pediments, advancing therapeutic interventions and
personal health monitoring. With aetiologies includ-
ing anxiety, loneliness, frustration, and more, such a
device could even serve as a diagnostic tool to reflect
on quality of life impairments (Pacan et al., 2014).
This work presents a wearable hand-to-mouth
classification system, consisting of an inertial mea-
surement unit (IMU) and an electrical bio-impedance
spectrometer. It can easily be worn around the arm.
The device tracks the arm’s orientation and electri-
cally excites it, discovering changes in its impedance
properties. These are leveraged to infer hand-to-
mouth behaviours in real-time.
To the best of our knowledge, this is the first sys-
tem to demonstrate automated detection of hand-to-
mouth habits. Furthermore, it is innovative in util-
ising bio-impedance spectroscopy for this goal. A
related detection scheme is described in US Patent
6762687 B2. Rather than sensing physical contact,
this scheme senses proximity between tagged body
parts. Bio-impedance has been widely studied in the
medical context for estimating biophysical quantities
such as body composition, metabolic functioning, and
cardiac activity. Recent research has demonstrated
integrating bio-impedance measurements into wear-
able devices – monitoring biophysical markers (Sepp
¨
a
et al., 2007) and even estimating users’ biometrics
(Martinsen et al., 2007). None, however, leveraged
bio-impedance technology for behaviour recognition,
as our system uniquely does.
2 THEORY OF OPERATION
2.1 Electrical Properties of Biomaterials
Electrical bio-impedance (EBI) describes the electri-
cal properties biological materials exhibit as current
54
Azaria, A., Mayton, B. and Paradiso, J.
Thumbs-Up - Wearable Sensing Device for Detecting Hand-to-Mouth Compulsive Habits.
DOI: 10.5220/0005680900540065
In Proceedings of the 9th International Joint Conference on Biomedical Engineering Systems and Technologies (BIOSTEC 2016) - Volume 1: BIODEVICES, pages 54-65
ISBN: 978-989-758-170-0
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
flows through them. It is commonly measured by
injecting a small sinusoidal alternating current (AC)
into the tissue under study. The injected current in-
duces an electrical field within the tissue and results
in a measurable voltage drop across it. The AC ver-
sion of Ohm’s Law (Equation 1) relates the material’s
electrical bio-impedance Z to the ratio between the
measured voltage V and the injected current I.
Z =
V
I
(1)
It is a complex quantity, since biomaterials not only
oppose current flow, but also store electrical charge,
phase-shifting the voltage with respect to the current
in the time-domain.
When current flows through a tissue, it passes
through extracellular and intracellular fluids. These
fluids are highly conductive as they contain salt ions
that can easily be displaced by a potential difference.
Conversely, the cells’ lipid membranes are insulators.
They act like capacitive plates, which prevent electri-
cal charges from flowing through. Accordingly, the
tissue’s impedance reflects its chemical composition,
membrane structures, and fluids distribution. For sim-
ilar reasons, the specific cell types (blood, adipose,
muscle, bone, etc.), the anatomic configuration (i.e.,
bone or muscle orientation and quantity), and the state
of the cells (normal or osteoporotic bone, oedematous
vs. normally hydrated tissue, etc.) greatly affect mea-
sured impedance quantities (Gabriel et al., 1996).
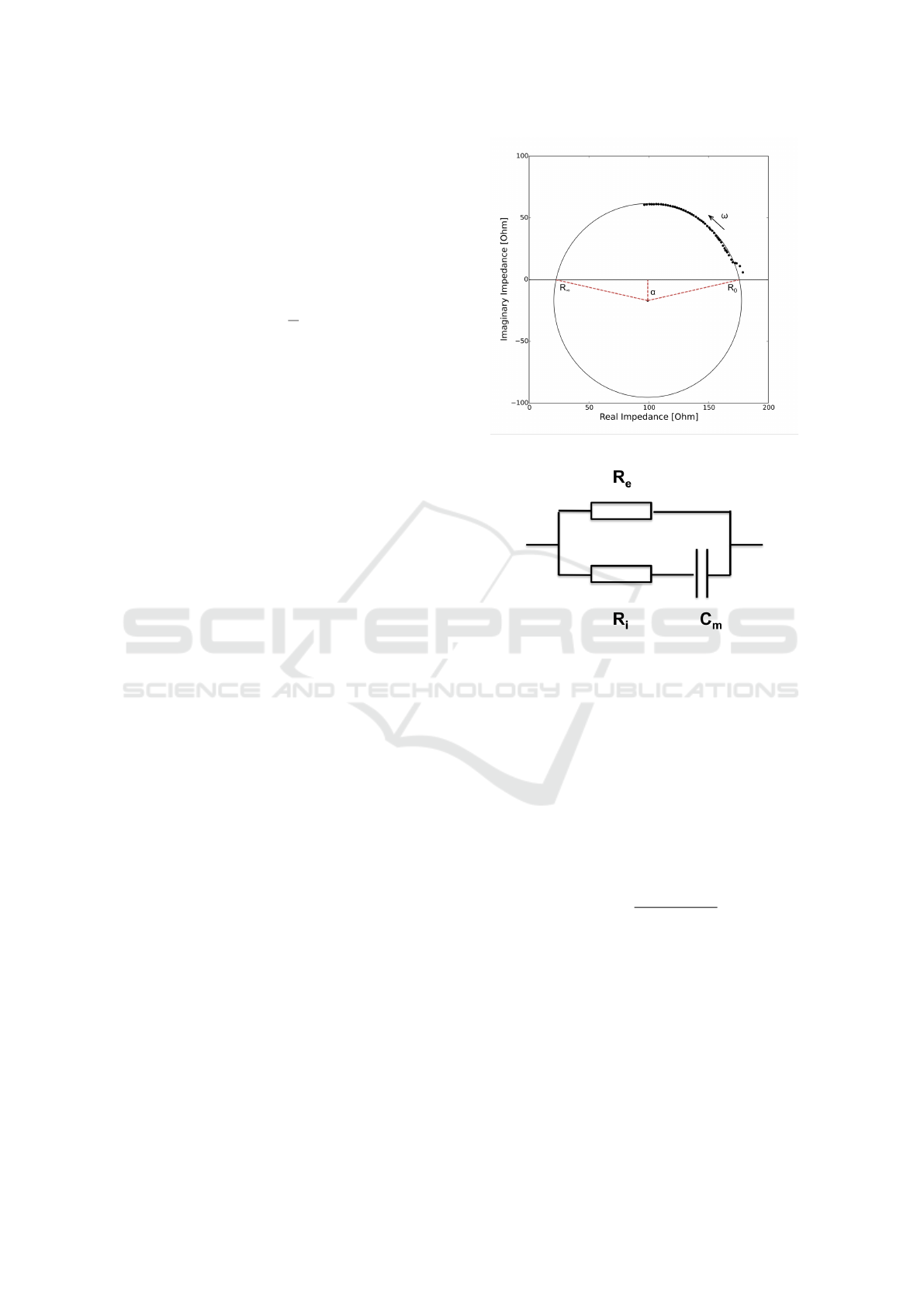
Most tissues display dispersive characteristics, i.e.
their impedance varies with the frequency of the ap-
plied current. A typical dispersion curve is illus-
trated in Figure 1. It is displayed as a Cole-Cole plot
which superimposes impedance measurements from
a range of frequencies on the complex plane. At low
frequencies, the cells’ membranes block the current.
Thus, the impedance corresponds only to the extracel-
lular resistance. As frequency increases, more current
passes through the intracellular capacitive path, and
the phase angle accumulates. At high frequencies,
the intracellular capacitance becomes negligible. The
impedance is once again purely resistive, dominated
by the intracellular and extracellular fluid resistances
connected in parallel. The frequency at which the tis-
sue’s reactance reaches a peak is known as the centre
frequency ( f
c
).
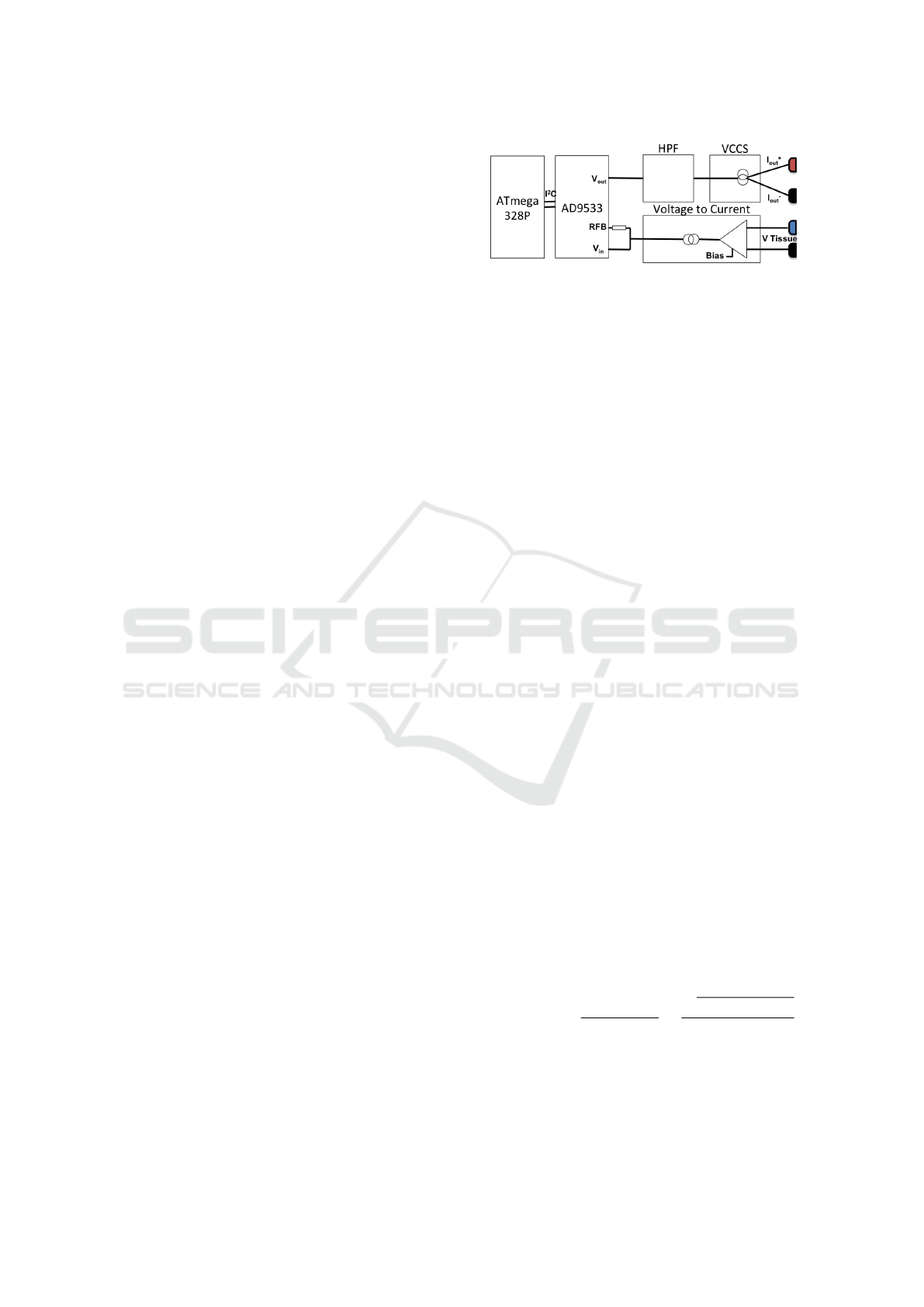
2.2 The Cole-Cole Equivalent Circuit
Model
The simplest electrical circuit that can be used to
model EBI response is presented in Figure 2. R
i
and
C
m
represent the intracellular current branch and R
e
Figure 1: Typical Cole-Cole plot of biological tissue.
Figure 2: Simple circuit model for biological tissues.
represents the extra cellular one. This model results
in a perfect semicircle in a Cole-Cole plot, with the
centre of the circle on the resistance axis.
In real tissue, however, the cells’ membrane is an
imperfect capacitor. Moreover, the large variation in
cell type, structure, and size causes a distribution of
the cells’ capacitive time constants (Cornish et al.,
1993). Cole and Cole showed that when capacitive
time constant distribution is added to the aforemen-
tioned circuit model, the impedance is related to the
frequency by (Cole and Cole, 1941):
Z = R
∞
+
R
0
− R
∞
1 + ( jωτ)
1−α
(2)
where,
R
0
= R
e
(3)
R
∞
= R
i
||R
e
(4)
τ = (R
e
+ R
i
)C
m
(5)
This model preserves the circular shape in a Cole-
Cole plot, but depresses the circle’s centre below the
resistance axis. α has a value between 0 and 1, and is
proportional to the angle to the depressed centre.
Thumbs-Up - Wearable Sensing Device for Detecting Hand-to-Mouth Compulsive Habits
55

2.3 Electrode Sensitivity Field and
Configuration
Two types of electrode systems are commonly used
to obtain EBI measurements. A 2-electrode system
uses the same pair of electrodes to inject current (IC)
and pick up (PU) the tissue’s response. A 4-electrode
system uses different pairs for excitement and pick up.
The type of electrodes in use (needle or skin surface,
gel or dry, etc.), and their configuration around the
tissue affect the sensed impedance almost as much as
the electrical properties of the tissue.
The electrode type determines how the electrical
conductor in the measurement leads interfaces with
the ionic conductor in the biological tissue. As current
flows, substance concentration may change near the
electrodes’ interface, adding bias impedance called
electrode polarisation. The skin-electrode contact in-
troduces an additional resistive bias. The 4-electrode
system is a robust setup that reduces the influence of
these factors (Seoane et al., 2008). When voltage pick
up is implemented with high-impedance differential
amplifiers, such artefacts can be neglected.
The electrode configuration sets boundary values
on the electrical fields that develop inside the tissue.
Thus, it governs the fields’ propagation and in effect,
the relative contribution of internal tissue regions to
the measured mutual impedance. Geselowitz formu-
lated this idea for a 4-electrode system (Geselowitz,
1971). He established that the measured impedance
Z resulting from the variable conductivity σ within a
volume conductor can be evaluated by:
Z =
Z
V
1
σ
Sdv (6)
Sensitivity S is a scalar field, determining the con-
tribution of a local conductivity change (∆σ) to the
overall potential. It can be calculated from the dot
product of two current density fields:
S =
~
J
IC
·
~
J
PU
(7)
~
J
IC
represents the current density field generated by a
unit current applied through the IC electrodes.
~
J
PU
is
the reciprocal current density field that would have
been generated had the same current been injected
through the PU electrodes.
Depending on the angle of the two fields, there
can be regions where the sensitivity is zero, posi-
tive, or negative. Hence, the tissue regions, in which
impedance changes are measured, can effectively be
manipulated by the electrode configuration. Note that
the measured mutual impedance is indifferent to in-
terchanges between the IC and PU electrodes. In this
context, this phenomenon is commonly referred to as
the Reciprocity Theorem.
Figure 3: Images of the prototype system (From top: IMU
wristband, EBI spectrometer, and PC Interface).
3 SYSTEM DESCRIPTION
Inspired by how pervasively electrical fields propa-
gate inside biological tissues, we set out to examine
if EBI spectroscopy can be applied to sense hand-to-
mouth behaviours. We hypothesised that placing the
hand inside the mouth will form different paths for
the current to traverse inside the body, resulting in
distinct impedance spectra. We presumed these can
be analysed, detecting the placement of the hand in-
side the mouth. In light of the multiple factors that
manifest in an EBI spectrum, we explored machine-
learning techniques for making such distinctions. A
similar technique, learning from capacitive signals,
has previously been used to classify simple gestures
for human-computer interfaces, suggesting promise
to this approach (Sato et al., 2012).
To test this hypothesis and assess its validity,
we built a prototype system. Images of the sys-
tem are presented in Figure 3. We present the sys-
tem’s design in detail throughout the following sec-
tion. When necessary, we discuss alternative imple-
mentation schemes and possible improvements.
3.1 Hardware
The hardware consists of an EBI spectrometer and
an IMU, wired to a nearby personal computer via
USB. The bio-impedance spectrometer was imple-
mented on a printed circuit board (PCB) and was
BIODEVICES 2016 - 9th International Conference on Biomedical Electronics and Devices
56
based on Analog Devices’ AD5933 on-chip network
analyser. The analyser contains a frequency generator
capable of outputting a sinusoidal excitation voltage.
The response signal is picked up by the analyser and
processed by an on-chip Discrete Fourier Transform.
Real and imaginary 16-bit data words, proportional to
the measured impedance, are returned for each output
frequency. A frequency range between 1 to 100 kHz
is supported, with a 0.1 Hz resolution.
We interfaced the AD5933 with the analogue
front-end presented in (Seoane et al., 2008). This
front-end, illustrated in Figure 4, converts the
AD5933 from a 2-electrode to a 4-electrode measure-
ment system. Hence, it cancels impedance contribu-
tions from electrode polarisation and skin-electrode
coupling. An instrumentation amplifier, voltage fol-
lower, and a hardwired 20 kΩ resistor construct a volt-
age controlled current source (VCCS), which mod-
ifies the AD5933 excitation from being voltage to
current driven. An auxiliary high-pass-filter (HPF)
blocks DC voltage from flowing into the tissues. This
way, current is controlled and regulated well be-
low hazardous levels. Frequencies are limited above
3.5 kHz to fully comply with IEC-60601 safety guide-
lines. AC current of 174 µA (RMS) was confirmed by
an independent measurement in our system.
An ATmega328P micro-controller controls the
AD5933, via I
2
C, and obtains the impedance mea-
surements. It is used to execute parts of our algo-
rithms, assessing their performance on an embedded
platform. We followed the layout by (Blomqvist et al.,
2012) to power the board and communicate with the
micro-controller over USB.
This layout does not restrict power consumption
and requires 0.5W for its operation. It is directly
wired to a PC, and so requires inefficient power and
communication isolation, that will not be necessary in
a battery powered wearable device. The basic compo-
nents in use, however, are well suited for low-power
applications. Typical power consumption of the AT-
Mega328P and the AD5933 are 33mW and 20mW,
respectively. Likewise, the analogue front-end can be
adjusted to require minimal power. Future versions
could easily revise power and communication to fit
the requirements of a wearable device.
We used 1” adhesive gel electrodes (Covidien
H124SG), commonly used in ECG and EMG, for
our experiments. These surface electrodes allow non-
invasive and precise fixture of the electrodes to the
arm. The contact electrolyte gel is of less impor-
tance to our application. It is designed to mitigate
the high impedance of the skin at lower frequencies,
typically under 1 kHz. By removing the DC compo-
nent from the excitation signal and alternating to a
Figure 4: Block diagram of the analogue front-end de-
scribed by Seoane et al.
4-electrode configuration, the polarisation character-
istics of the particular electrodes in use can also be
neglected (Seoane et al., 2008).
We therefore expect that a future change to dry
electrodes – relying on sweat as the electrolytic so-
lution – will not significantly affect our results. Dry
electrodes will lower our system’s cost and improve
its unobtrusiveness and reusability. It will, however,
have to assume the continuous natural perspiration of
the skin. Otherwise, the sweat electrolytes, carrying
our system’s current, can be depleted over time.
The IMU is attached to a wristband-like strap
and worn on the user’s forearm. It streams mea-
surements of the forearm’s orientation and displace-
ment. We used an MPU9150, which comprises a 3-
axis accelerometer, a gyroscope, and a magnetometer
in a single chip. The chip was placed on a breakout
board and connected to an off-the-shelf Arduino with
an identical ATMega328P micro-controller. In future
versions, the IMU can easily be connected to the spec-
trometer’s I
2
C bus, embedding all sensors on a single
board.
3.2 Software
3.2.1 Calibration
The impedance measurements – real and imaginary
16-bit data words for each exciting frequency – are
first scaled and calibrated. The calibration accounts
for the complex impedance introduced by our sys-
tem’s various electronic components – between the
AD5933 and the studied tissues.
A system gain factor scales the magnitude of each
impedance measurement. Such scaling can be formu-
lated as:
|Z
tissue
(ω)| =
Magnitude
Gain Factor
=
p
R (ω)
2
+ I (ω)
2
G(ω)
(8)
We used a 2R-1C circuit with known impedance, like
in Figure 2, to derive the frequency-dependent gain
factor of our system. Similarly, the system phase off-
set is derived from a circuit with pure resistance. It
Thumbs-Up - Wearable Sensing Device for Detecting Hand-to-Mouth Compulsive Habits
57

factors in as a frequency dependent bias when cali-
brating the impedance measurements:
∠ Z
tissue
(ω) = tan
−1
(
I (ω)
R (ω)
) − ∠ system(ω) (9)
The IMU allows programmable full-scale ranges
to each of its components. Based on the arm’s char-
acteristic motion, we set these ranges to ±250 dps,
±2 g, and ±1200 µT for the gyroscopes, accelerom-
eter, and magnetometer respectively. We measured
offsets in the angular velocity and linear acceleration
with a simple gimbal. Each of the 9 measurements
were scaled and corrected accordingly.
3.2.2 Feature Extraction
Features for hand-to-mouth detection are extracted
from calibrated EBI and IMU measurements. These
features are listed in Table 1.
Table 1: List of extracted features.
EBI features IMU features
Circle centre (X
c
) Quaternion orient. (q
0
)
Circle centre (Y
c
) Quaternion orient. (q
1
)
Circle radius (R) Quaternion orient. (q
2
)
Infinity impedance (R
∞
) Quaternion orient. (q
3
)
Static impedance (R
0
)
Depression angle (α)
Centre frequency ( f
c
)
Fit accuracy (Var{R
n
})
EBI Features
We chose the Cole-Cole model to compactly repre-
sent the EBI data, using its parameters as features. To
calculate them, the calibrated impedance samples are
mapped to the impedance plane in a Cole-Cole plot.
Such mapping was exemplified in Figure 1. Each data
point on the plane corresponds to the resistance and
reactance measured at a single frequency. We seek to
fit these points to the Cole equation – a perfect semi-
circle with the centre depressed below the resistance
axis.
We leverage the circular shape to estimate the pa-
rameters of the Cole-Cole model. Instead of solving
directly for the model parameters (R
∞
, R
0
, τ, α and
f
c
), we estimate the circular curve that best represents
our data. We do so by finding a point (X
c
,Y
c
) that
minimises the variance in the distances R
n
, measured
from it to the N impedance data points.
min Var{R
2
n
} = min Var{|(X
c
,Y
c
) − Z
n
|
2
} (10)
This point will be the Cole-Cole model circle cen-
tre. A closed form solution for such a minimisation
is obtained by differentiating Equation 10. The Cole-
Cole model parameters, R
∞
, R
0
and α, can then be
solved geometrically from the circle centre. A de-
tailed derivation is found in (Ayll
´
on et al., 2009).
The centre frequency f
c
is determined as pre-
sented in the work of (Cornish et al., 1993). Lengths
of cords u
i
and v
i
, which respectively join each
impedance data point i with R
∞
and R
0
, are calcu-
lated. The impedance points are then projected to a
log(u
i
/v
i
) vs. log(ω
i
) plane, where they yield a line
with slope (1 − α). The x-axis intercept of this line
determines the centre frequency.
We calculate the variance in R
2
n
and affix it as an
additional parameter to our EBI data representation.
It serves as an indicator of how accurately our data
fits to a circular curve. Later, it will be utilised
when performing real-time classification, to identify
movement artefacts and discard them.
IMU Features
We used an AHRS (Attitude and Heading Reference
System) sensor-fusion algorithm to handle the IMU
measurements. The algorithm produces a four-vector
quaternion representation of the device’s orientation
in 3D. Rather than using computationally expen-
sive Kalman-Filter implementations, we chose the
sensor fusion algorithm developed by Madgwick
(Madgwick et al., 2011). This algorithm derives
simple gradient descent steps to conduct fusion and
estimations iteratively, allowing it to operate on
computationally constrained platforms compatible
with wearable devices.
Execution
The extraction algorithms were designed to execute
in real time. The orientation state is updated con-
tinuously, processing IMU measurements at a 400 Hz
sampling rate. The EBI feature extraction algorithm
processes a frequency sweep at a 0.64 Hz rate. We
configured the frequency sweep to obtain 50 samples
equally spaced between 4 kHz and 100 kHz. The fre-
quency resolution can be modified to boost the sweep-
ing rate at the expense of the fit accuracy. The sweep-
ing rate determines the rate at which the feature vec-
tors are generated. The EBI features are first extracted
and then extended with the current four-vector quater-
nion orientation.
The feature extraction algorithms were imple-
mented both for a personal computer and for the AT-
mega328P micro-controllers. We experimented with
executing them on both. Running on the micro-
controller reduces dramatically (factor 18) the data to
be communicated to the next stage. It does so, how-
ever, at the cost of an increased computational load.
BIODEVICES 2016 - 9th International Conference on Biomedical Electronics and Devices
58

We experienced no performance issues executing the
algorithms on the ATmega328P, when the sampling
rates were set as previously mentioned. We leave the
decision between the execution alternatives open for
future applications.
3.2.3 Hand-to-Mouth Detection
The final stage of our software allows three modes of
operation: Collection mode logs real-time collected
data and extracted features into a local file for later
analysis. A human observer labels the data points
with a binary label. Positive and negative labels cor-
respond to situations when the hand is inside and out-
side the mouth. Enrolment mode accepts previously
collected labeled data either from a specific user or a
group of users. It optimises a set of machine-learning
algorithms and chooses the one which is most likely
to perform best. Prediction mode makes real-time
predictions on the hand’s situation. It uses the opti-
mal classifier from the previous mode to predict on
each feature vector as it is produced. The predictions,
as well as the arm’s orientation, are visualised to the
user as feedback.
Our system allows learning via any binary-
classification model, as long as it implements a sim-
ple fit, score and predict interface. We embedded
the S cikit − learn implementation of five classifica-
tion models in our system: Random Forests (RF),
Support Vector Machines (SVM), AdaBoost (AB), K-
Nearest Neighbours (KNN) and Logistic Regression
(LR) (Pedregosa et al., 2011). The models were cho-
sen to intentionally differ in their underlying statis-
tical assumptions and algorithmic implementations.
Hence, they differ not only in the accuracy they may
achieve, but also in the computational complexity
their training or prediction involve.
We optimise the unique parameters of the classi-
fication models, by searching a grid of possible val-
ues. A classifier instance is trained for each parameter
combination. How well it generalises is assessed us-
ing 3-iteration random subsampling cross-validation
(Murphy, 2012). Once the optimal parameters per
classification model are set, we choose among the
models by their mean validation accuracy.
Prediction mode introduces two additional mech-
anisms to facilitate the real-time prediction and feed-
back. First, it discards data points whose Cole-Cole
circular fit accuracy is below a threshold (i.e. high
Var{R
2
n
}). These were observed during natural move-
ment, in singular cases – when by the time a fre-
quency sweep is over, the user has already changed
between postures with different EBI spectra. Clearly,
fitting to the inconsistent measurements does not
truthfully represent the electrical path taken by the
current. Discarding them, therefore, prevents unnec-
essary prediction errors. Second, a moving average
window on the predicted labels was implemented,
smoothing the visual feedback presented to the user.
4 EVALUATION
In this section we demonstrate the system’s feasibil-
ity by evaluating various aspects of its performance.
Note that the prototype system leaves many degrees
of freedom in its application – from configuring the
electrodes on the forearm, to when it is worn and
by whom. We therefore tackle this challengingly
broad space by breaking the evaluation into three
stages. First, we present an approach to process the
bio-impedance signals and verify they carry informa-
tion about hand-to-mouth behaviours. We associate
them with possible body postures, narrowing down
the scope of movement for our experiments. Second,
an electrode positioning strategy is proposed, optimis-
ing the system’s sensitivity to conductivity changes
around the fingers. Finally, the system’s detection ac-
curacy is assessed, analysing how it performs in two
possible use cases with multiple subjects.
4.1 EBI of Hand-to-Mouth Behaviours
4.1.1 Method
The first stage explored how a wearer’s hand-to-
mouth behaviours manifest in the measured EBI spec-
tra. To this end, we have conducted an experiment
with a single subject in an indoor working environ-
ment. The subject wore the device for 5 consecutive
hours, and data were recorded as he naturally moved
in this everyday setting. Periodically, the subject was
asked to place any of his 5 fingers in his mouth. An
external observer annotated the recorded data with
the subject’s activity and body postures. Throughout
this experiment, the electrodes were placed in a single
configuration on the subject’s forearm, marked (10,1)
as will later be detailed in Section 4.2.
We utilised the recorded data to narrow down the
scope of movement for the next stages of this work.
This satisfies experimental control and reproducibil-
ity. The subject’s imitation of natural movement cap-
tures most possible orientations of the forearm, as
well as the variance of bioelectrical measurements.
Special attention was paid to ensure that the dataset
also included situations where different body parts
come in contact with the subject’s fingers. These are
important as they create different paths through which
Thumbs-Up - Wearable Sensing Device for Detecting Hand-to-Mouth Compulsive Habits
59

Figure 5: Sample EBI spectra generated by different body postures.
current can traverse, hence changing the characteris-
tics of the EBI spectrum.
4.1.2 Results and Discussion
The EBI recordings supported our detection hypoth-
esis. Noticeable differences were observed between
situations where the subject’s hand was inside or out-
side the mouth. These manifest not only for spe-
cific exciting frequencies, but indeed throughout the
entire spectrum. Fitting the spectra to a Cole-Cole
model, we observe satisfactory differences in many
of the model’s parameters. For example, the static
impedance R
0
demonstrated a mean decrease of 32%
when juxtaposing sitting with placing the thumb in-
side the mouth.
As mentioned, we were particularly interested in
postures where different parts of the body come in
contact with the fingers. We experimented with an
assortment of these, in an attempt to identify ones
which create unique EBI spectra. Our experimen-
tation was limited to contact with body parts which
were exposed wearing full clothing. We exemplify
three such postures – crossing the arms, clasping the
hands, and leaning the head on the hand – in Figure
5. EBI spectra from sitting, standing and placing any
of the 5 fingers inside the mouth are overlaid for com-
parison.
Note that the EBI spectrum generated by clasp-
ing the hands resembles the ones generated by plac-
ing any finger inside the mouth. In some instances,
we noticed a circular spectrum almost identical to one
from a hand-to-mouth posture. Our design trusts dif-
ferences in the orientation components to settle these
ambiguities.
Supporting this assumption, we analysed differ-
ences in the system’s detection accuracy, restricting
it to rely only on a subset of components from the ex-
tracted features. Classification models were trained,
as indicated in Section 3.2.3, for three cases: includ-
ing only the orientation components, only the EBI
components, or all available components. We then
compared the models by their prediction accuracies,
classifying an independent test set. This set was col-
lected by repeating the aforementioned experiment
with the same subject on a different day. Detection
accuracies of 74.39%, 90.74% and 95.76% were ob-
tained for each of the cases respectively. They imply
the suitability of the different sensors for our detec-
tion task, and bolster our decision to combine them.
Finally, we studied the measured EBI spectra to
select 10 representative body postures. The first five
were tied with the placement of each of the wearer’s
5 fingers inside the mouth. The remaining postures
were selected to generate the highest diversity in their
corresponding EBI spectra. Crossing the arms, clasp-
ing the hands, and leaning the head on the hand were
chosen by this criterion. Sitting still and standing
were chosen due to their high rate of occurrence in the
dataset. The last two represent EBI spectra similar to
walking and typing which were the most frequently
observed postures.
BIODEVICES 2016 - 9th International Conference on Biomedical Electronics and Devices
60
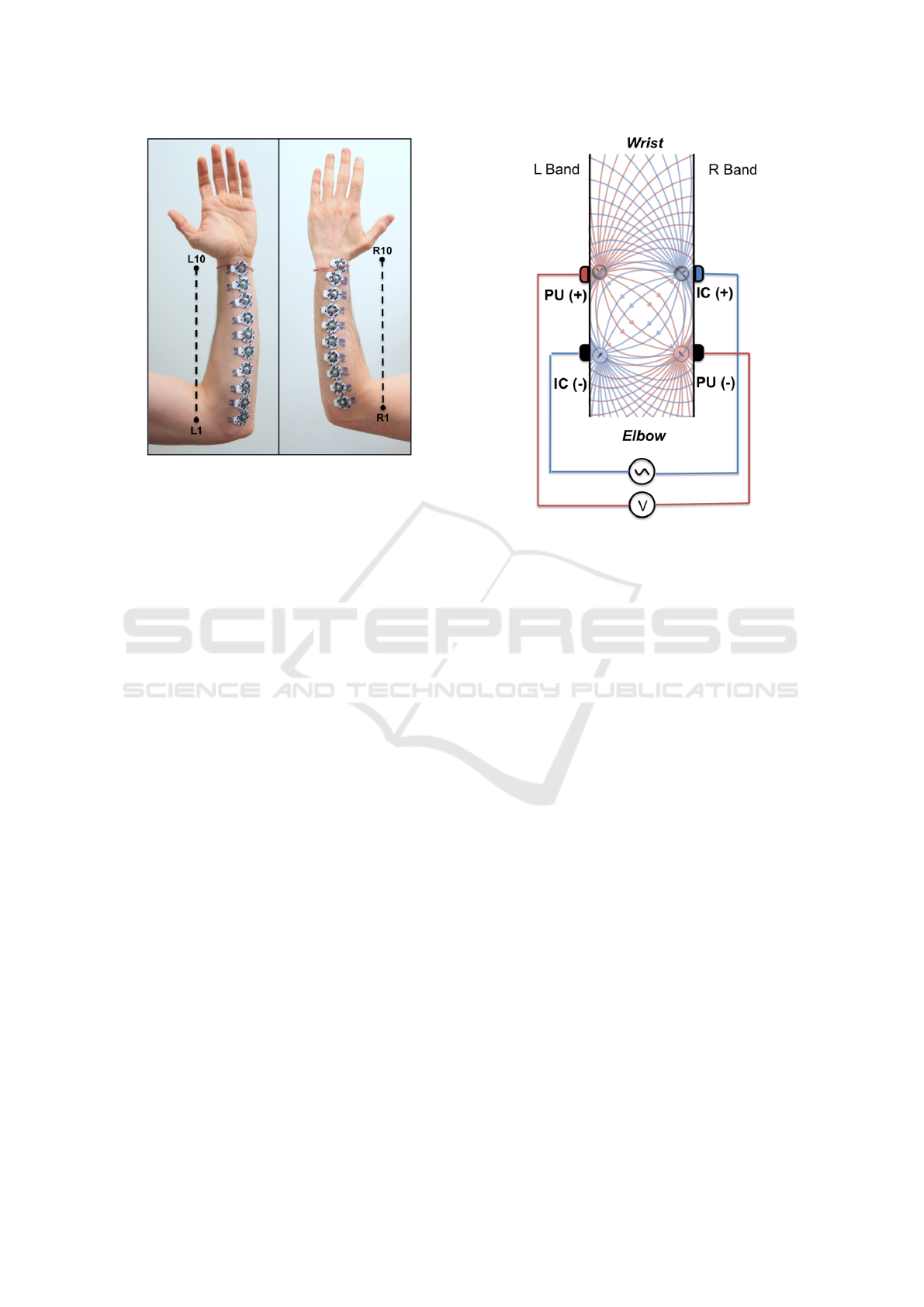
Figure 6: Electrode Instrumentation on a subject’s forearm
used to evaluate an optimal positioning.
4.2 Positioning Optimisation
The second stage examined possible positioning of
the electrodes on the arm. We limited the electrodes’
arrangements to the forearm, as only such arrange-
ments would make practical sense for wearing or
wiring in future applications.
4.2.1 Instrumentation
Figure 6 illustrates how a single subject was instru-
mented with 20 electrodes. In accord with the muscu-
lar anatomy of the forearm, the electrodes were lined
in two bands. Electrodes following the posterior and
anterior fascial compartments were marked with L
and R respectively. Within each band, the electrodes
were indexed from 1 to 10 starting from the elbow.
The mean distance between the centre of consecutive
electrodes was 2.66 cm.
Though each pair of electrodes is interchangeable
up to a sign, and the PU and IC electrodes are in-
terchangeable by the Reciprocity Theorem, it is still
infeasible to exhaustively evaluate each of the 19,380
possible electrodes’ combinations. Therefore, we in-
troduced a constraint that the PU and the IC electrodes
are configured in a crossed alignment, in which the
current density fields are intersecting with each other.
Figure 7 illustrates such an arrangement. The IC (+)
electrode and the PU (-) electrode were always as-
signed to the R band. Correspondingly, the IC (-)
electrode and the PU (+) electrode were always as-
signed to the L band. Forming an intersection, the (+)
pair and the (-) pair were restricted each to maintain
the same index along the forearm. We use the elec-
Figure 7: Schematic illustration of a crossed alignment of
the electrodes. The propagation lines are a coarse approxi-
mation of the induced current density fields.
trodes’ indices to denote their configuration. Config-
uration (10,1), for example, marks an electrode con-
figuration where that the (+) and (-) electrodes are in
indices 10 and 1 respectively.
The assumption that the electrodes should be
crossed is not verified within the scope of this work.
However, it builds on our intuition of the current den-
sity fields (
~
J
PU
and
~
J
IC
) induced by the electrode sys-
tem. A coarse approximation of these is visualised
in Figure 7. Unlike most cases where conductiv-
ity changes are circumscribed by the electrodes, we
would like to sense changes further away – in regions
which are electrically coupled by the touch of the fin-
gers. The crossed alignment, therefore, attempts to
nullify the sensitivity field (dot product) inside the
forearm by creating antiparallel components between
the current density fields. On the other hand, it at-
tempts to increase the sensitivity as we go further
away – where the fields become more parallel.
4.2.2 Method
Our experiment varied the distance between the (+)
and (-) electrodes, as well as their position along the
forearm. Starting with configuration (10,1), we de-
creased the distance in three different ways, evaluat-
ing each configuration we encounter:
• Moving the (+) pair towards the elbow – from
configuration (10,1) to (2,1).
Thumbs-Up - Wearable Sensing Device for Detecting Hand-to-Mouth Compulsive Habits
61
• Moving the (-) pair towards the wrist – from con-
figuration (10,1) to (10,9).
• Symmetrically moving both pairs towards each
other – from configuration (10,1) to (6,5).
Each electrode configuration was evaluated by two
separate metrics.
First, we compared the electrode configurations
by their sensitivity to changes around the fingers. We
calculated fluctuations in the measured impedance, as
we alternated the body tissues that the fingers touch.
By proxy, the more intense the fluctuations were, the
more conductivity changes around the fingers con-
tributed to the overall impedance. We used the 10
body postures to represent a fixed set of body tissues
that come in contact with the fingers. For each elec-
trode configuration, an identical number of samples
were recorded in every posture. Fluctuations were
then calculated by determining the coefficient of vari-
ation for the impedance magnitude in the recording:
Coefficient of variation =
std{|Z|}
mean{|Z|}
(11)
Second, we assessed the electrode configurations
by their predictive power. We held a second record-
ing session with the same subject on a different day
and re-instrumented his arm with the electrodes. The
EBI spectra, generated by the various postures in this
session, served as an independent test set. In this
experiment, we only used the EBI features, discard-
ing the orientation components. This way, our results
only reflect the electrical dissimilarities between the
electrode configurations. A classification model was
trained and its optimal parameters were selected, us-
ing data only from the first recording session. The
electrode configurations were compared with their
prediction accuracy on the test set.
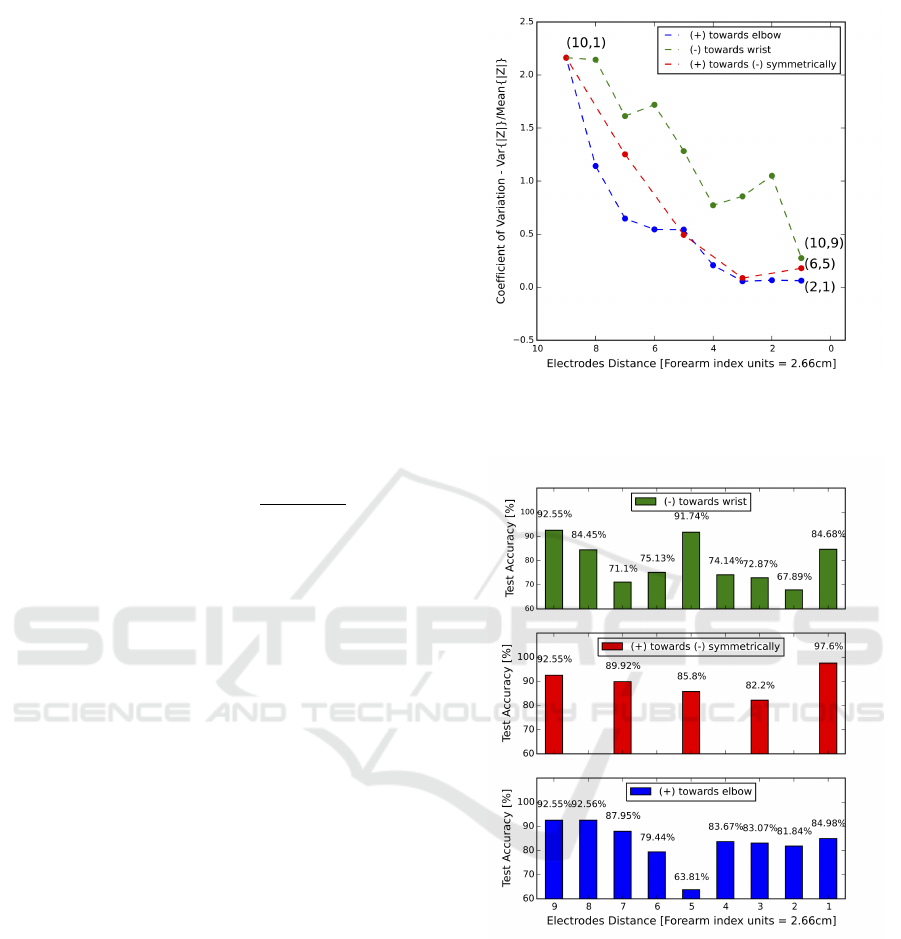
4.2.3 Results and Discussion
Figure 8 presents the coefficient of variation in the
impedance magnitude obtained for each of the eval-
uated configurations. The presented results were de-
rived from the impedance sampled with a single ex-
citation frequency 52 kHz. Similar trends were ob-
served measuring with other excitation frequencies
within the system’s range.
It is evident that the coefficient of variation gradu-
ally increases as the electrodes in the pairs go further
from each other. This finding is consistent with the
theoretical sensitivity field model that was previously
reviewed. The further the electrodes are, the vaster the
current density fields spread inside the tissue, grant-
ing distant regions, such as around the fingers, higher
relative contribution to the overall impedance. The
Figure 8: Coefficient of variation of the electrode configu-
rations. The overlaid Indices pairs mark specific configura-
tions of interest.
Figure 9: Predictive power of the electrode configurations.
region circumscribed by the electrodes also appears
to have an effect on the coefficient of variation. This
can be identified by studying the three graphs of Fig-
ure 8 against each other. Notice how the coefficient is
higher when the circumscribed region is closer to the
wrist rather than the elbow.
A second assessment was based on the configura-
tions’ predictive power. Figure 9 plots the prediction
accuracies achieved by the optimal classification al-
gorithms after selecting their parameters. Configura-
tion (10,1) yields powerful accuracy results as antici-
pated by its coefficient of variation. Nonetheless, the
BIODEVICES 2016 - 9th International Conference on Biomedical Electronics and Devices
62

best accuracy results (up to 97.6%) are encouragingly
produced by configuration (6,5). As it is geometri-
cally concentrated, such configuration can greatly fa-
cilitate a wearable design for practical applications.
We chose to proceed to the next stage of the eval-
uation with two electrode configurations: (10,1) due
to its high coefficient of variation, and (6,5) due to
its highest prediction accuracy. Detection accuracies
from both are presented in the next section. We have
also conducted experiments in which the IC and PU
electrodes were not constrained to move symmetri-
cally or together. These are not included here, since
they revealed neither an observable trend nor higher
sensitivity or accuracy.
4.3 Detection Accuracies
The final stage analysed aspects of our system’s ro-
bustness, using data collected from multiple subjects
on multiple days. Within the scope of this work, we
explored two probable use cases – recurrent usage by
the same user and encountering previously unseen
users for the first time.
Recurrent Usage
First, we investigated situations when the same user
wears the system on separate days. This captures
plausible imprecisions from recurrent usage of the
system, like inconsistent placement of the electrodes
or misalignment of the IMU. Additionally, it accounts
for transient changes in bioelectrical properties of the
wearer’s forearm. These may introduce perturbations
of over 8% in an EBI spectrum (Gabriel et al., 1996).
They are likely to stem from temporal variations in
fluid volumes, blood pressure, body temperature,
nervous activity, hydration, electro-dermal activity,
etc. (Schwan, 1956)
Previously Unseen Users
Next, we examined how well the system generalises,
performing on new subjects that have not been pre-
viously seen. This tests the system’s tolerance to
person-to-person differences, including differences in
adipose, muscle and vasculature ratios, bone anatomy,
sub-dermal water content and skin thickness. Such
generalisation is of crucial importance for future de-
sign of practical applications. It involves implications
on the system’s capability to scale, deploying to a
broad user base without a need to first collect their
data and customise per individual.
4.3.1 Method
We recruited 15 subjects, 8 females and 7 males, to
participate in a pilot user study. The study was ap-
proved by IRB protocol #1504007088. All subjects
were between the ages 21 and 33 (mean=26.5; σ =
3.6). Their forearm length was measured and ranged
between 22 cm and 27.5 cm (mean=24.8; σ = 1.7).
They were asked for their weight, which varied be-
tween 47 kg and 77 kg (mean=58.3; σ = 9.4), and
their height which varied between 155 cm and 185 cm
(mean=169; σ = 8.9).
The subjects were invited twice to identical ses-
sions on two separate days over the course of a sin-
gle month. At the beginning of each session, they
were instrumented with the electrode configurations
selected in Section 4.2, on their left forearm. The sub-
jects’ forearm length was measured, and the place-
ment of each electrode within the combination was
scaled accordingly. Data were then recorded as the
subjects were asked to pose in the postures from Sec-
tion 4.1. Positive and negative labels were respec-
tively assigned to postures when the subjects’ hand
was inside or outside their mouth.
An additional subtlety was introduced for postures
in which the hand was placed inside the mouth. For
each finger, measurements were taken both when the
finger was fully sucked (up to the middle phalanx)
and when its tip was only lightly touching the inner
lip. This extension intends to simulate dissimilarities
between thumb sucking and nail biting, and verifies
the system’s ability to detect both.
We framed the evaluation as a binary-
classification problem, and report the system’s
detection performance in terms of classification
accuracy. According to the evaluated use case, the
dataset was partitioned for training, validation and
testing purposes. Prior to any analysis, all data points
were scaled using feature standardisation (Murphy,
2012). In total, we have collected 10,483 data points;
Each of which is a Cole-Cole representation of an
EBI spectrum, comprising 50 complex impedance
measurements, and a corresponding orientation.
6,348 of the data points had a positive label and 4,134
had a negative one.
4.3.2 Results and Discussion
Recurrent Usage
First, we established how the system generalises
when the same individual recurrently wears it. We did
so by tailoring a classifier per user. The first recording
session is randomly partitioned into training and val-
idation datasets; Data recorded in the second session
was held-out as a test set. We searched the param-
Thumbs-Up - Wearable Sensing Device for Detecting Hand-to-Mouth Compulsive Habits
63

eter space of each classification model, as indicated
in Section 3.2.3. The combination of algorithm and
parameters, which optimised the performance on the
validation set, was selected as the subject’s personal
classifier.
Table 2 reports the median, average and standard
deviation of the test accuracy scores obtained by the
personal classifiers. It determines that when recur-
rently worn by a user, our system is expected to ac-
complish a median accuracy of up to 92.95%, detect-
ing hand-to-mouth behaviours. Encouragingly, elec-
trode configuration (6,5) performed equally well as
configuration (10,1). We regard the median statistic
as the most relevant one for our evaluation, as it is the
most robust to subjects which are potentially outliers
in our user base.
We also examined a condition when the personal
classifiers were constrained to train only with a spe-
cific classification model. In this case, only the
model’s parameters were optimised per user. For con-
figuration (10,1), similar median accuracies were ob-
tained when using only KNN classifiers and when op-
timising with all possible models. The same emerges
for configuration (6,5), constraining its training only
to RF classifiers. This finding implies, that a single
classification model may be used to generalise for
recurrent usage. Relevant accuracy scores of these
constrained cases are also presented in Table 2. We
state, however, that a larger user base, which yields a
smaller distance between the median and mean statis-
tics, should be analysed to confirm such observations.
We highlight that these accuracies were obtained
from training with a single usage. An alternative
approach may suggest training with multiple usages
to potentially increase detection accuracies. Despite
its rigour, we chose the former, trusting that future
applications would greatly benefit from requiring not
more than a single usage for training. Otherwise, the
users’ enrolment procedure can become cumbersome
and impractical.
Previously Unseen Users
Next, we assessed the system’s performance when en-
countering subjects it has not previously seen. We
partitioned our dataset, holding-out data points from
3 subjects (20%) for testing purposes. The remaining
subjects were used for training and validation. Per
subject, we included data points from the two record-
ing sessions, diversifying the datasets with multiple
usages. As in Section 3.2.3, the optimal combination
of model and parameters was selected by its valida-
tion accuracy. Its test accuracy was derived from mak-
ing predictions on the previously unseen test subjects.
Due to the relatively small number of subjects, the
Table 2: Detection accuracies for recurrent usage by the
same user. Baseline accuracies were generated by a strat-
ified dummy classifier.
Config. Classifier Test accuracies
Median Mean (σ)
(10,1) Optimal 92.95% 90.98% (6.3)
KNN 92.15% 88.31% (6.5)
Baseline 53.42% 53.4% (3.3)
(6,5) Optimal 91.6% 90.96% (7.1)
RF 91.6% 85.47% (9.2)
Baseline 53.83% 52.9% (3.2)
particular assignment of test subjects is likely to af-
fect the resulting accuracy. Therefore, instead of ran-
domly selecting an assignment, we chose to exhaus-
tively search through all possible ones. This approach
gains a more credible insight into the system’s capa-
bility to generalise person-to-person differences. It
protects from arbitrary bias that may mislead our eval-
uation. In Table 3 we report the median, average and
standard deviation of the test accuracies obtained by
the optimal classifiers as they predicted for their cor-
responding assignments.
Our results suggest that our system is likely to pro-
duce an accuracy of 87.5%, predicting hand-to-mouth
behaviours for subjects it has never before seen. Re-
grettably, these high accuracy results were only pro-
duced for electrode configuration (10,1). Configu-
ration (6,5), performed significantly worse, yielding
median accuracy of only 79.69%. For two thirds of
the subjects’ assignments, RF was selected as the op-
timal model regardless of the electrode configuration.
This indicates that the RF model may be the fittest one
for this kind of task.
We continued our analysis, exploring the possi-
bility of adjusting the classifiers by the users’ phys-
icality. We clustered our subjects into two groups,
based on their gender, age, weight, height and fore-
arm length. A 2-component Gaussian Mixture Model
clustering technique was used, utilising Expectation
Minimisation (EM) to fit the subjects’ physicality
measurements. Except for a single subject, the re-
sulting clusters overlapped with the subjects’ genders.
We mark the clusters F and M respectively, according
to the majority of females and males in their popula-
tion.
We repeated the previous analysis for each of the
clusters separately. To preserve the ratio from the for-
mer analysis, a single subject was held-out for test-
ing from the M cluster, and a pair were held-out from
cluster F. The median, mean and standard deviations
of the test accuracies are also presented in Table 3 for
comparison.
Successful improvements of up to 3% in the me-
BIODEVICES 2016 - 9th International Conference on Biomedical Electronics and Devices
64

Table 3: Detection accuracies predicting for users that have
not been previously seen.
Config. Dataset Test accuracies
Median Mean (σ)
(10,1) All 87.5% 87.21% (5.1)
Cluster F 90.52% 87.96% (6.3)
Cluster M 90.72% 88.14% (6.1)
(6,5) All 79.69% 79.81% (5.5)
Cluster F 83.25% 84.7% (7.9)
Cluster M 82.09% 82.82% (4.4)
dian accuracies were observed employing this ap-
proach. They suggest that person-to-person differ-
ences can be ameliorated by an a priori query of the
user’s physicality. It could be possible for future ap-
plications to optimise multiple classifiers based on
physical typecasts. A mixture of those can then be
employed for unseen users, consequently improving
expected accuracy. The mixture should be weighted
by the users’ similarity to the physical typecasts pro-
duced while training. Future work should further ex-
plore this possibility with a larger user base.
5 CONCLUSION
This work has presented a wearable system detecting
hand-to-mouth behaviours in real time. It demon-
strated a novel sensing method, associating bio-
impedance spectra with the wearer’s behaviour. The
relationship between the system’s sensitivity and its
electrode configuration has been investigated, opti-
mising the latter to potentially increase detection ef-
ficacy. The system’s performance has been evalu-
ated, examining use cases where it is recurrently worn
and where it encounters a user for the first time. It
achieved a median detection accuracy of 92% and
90%, respectively. These, we aspire, may be sufficient
to guide new directions in the treatment and monitor-
ing of compulsive hand-to-mouth habits.
REFERENCES
Ayll
´
on, D. et al. (2009). Cole equation and parame-
ter estimation from elect. bioimpedance spectroscopy
measurements-a comparative study. In Eng. in
Medicine and Biology Soc., 2009. EMBC 2009. Ann.
Int. Conf. of the IEEE, pages 3779–3782. IEEE.
Azrin, N. and Nunn, R. (1973). Habit-reversal: A method
of eliminating nervous habits and tics. Behaviour re-
search and therapy, 11(4):619–628.
Baydas¸, B. et al. (2007). Effect of a chronic nail-biting habit
on the oral carriage of enterobacteriaceae. Oral micro-
biology and immunology, 22(1):1–4.
Blomqvist, K. et al. (2012). An open-source hardware for
elect. bioimpedance measurement. In Electron. Conf.
(BEC), 2012 13th Biennial Baltic, pages 199–202.
IEEE.
Cole, K. S. and Cole, R. H. (1941). Dispersion and absorp-
tion in dielectrics i. alternating current characteristics.
The J. of Chemical Physics, 9(4):341–351.
Cornish, B. et al. (1993). Improved prediction of extracel-
lular and total body water using impedance loci gener-
ated by multiple frequency bioelect. impedance anal-
ysis. Physics in medicine and biology, 38(3):337.
Gabriel, S. et al. (1996). The dielectric properties of biolog-
ical tissues: Ii. measurements in the frequency range
10 hz to 20 ghz. Physics in medicine and biology,
41(11):2251.
Geselowitz, D. B. (1971). An application of electrocardio-
graphic lead theory to impedance plethysmography.
Biomedical Eng., IEEE Trans. on, (1):38–41.
Madgwick, S. O. et al. (2011). Estimation of imu and marg
orientation using a gradient descent algorithm. In Re-
habilitation Robotics (ICORR), 2011 IEEE Int. Conf.
on, pages 1–7. IEEE.
Martinsen, O. G. et al. (2007). Utilizing characteristic elect.
properties of the epidermal skin layers to detect fake
fingers in biometric fingerprint systems - a pilot study.
Biomedical Eng., IEEE Trans. on, 54(5):891–894.
Murphy, K. P. (2012). Machine learning: a probabilistic
perspective. MIT press.
Pacan, P. et al. (2014). Onychophagia is associated
with impairment of quality of life. Acta dermato-
venereologica, 94(6):703–706.
Pedregosa, F. et al. (2011). Scikit-learn: Machine learn-
ing in Python. J. of Machine Learning Research,
12:2825–2830.
Sato, M. et al. (2012). Touch
´
e: enhancing touch interaction
on humans, screens, liquids, and everyday objects. In
Proc. of the SIGCHI Conf. on Human Factors in Com-
puting Systems, pages 483–492. ACM.
Schwan, H. P. (1956). Elect. properties of tissue and cell
suspensions. Advances in biological and medical
physics, 5:147–209.
Seoane, F. et al. (2008). An analog front-end enables elect.
impedance spectroscopy system on-chip for biomedi-
cal applicat. Physiological measurement, 29(6):S267.
Sepp
¨
a, V. et al. (2007). Measuring respirational parame-
ters with a wearable bioimpedance device. In 13th
Int. Conf. on Elect. Bioimpedance and the 8th Conf.
on Elect. Impedance Tomography, pages 663–666.
Springer.
Tanaka, O. M. et al. (2008). Nailbiting, or onychophagia: a
special habit. American J. of Orthodontics and Dento-
facial Orthopedics, 134(2):305–308.
Thumbs-Up - Wearable Sensing Device for Detecting Hand-to-Mouth Compulsive Habits
65
