
Absolute Localization using Visual Data for Autonomous Vehicles
Safa Ouerghi
1
, R
´
emi Boutteau
2
, Pierre Merriaux
2
, Nicolas Ragot
2
,
Xavier Savatier
2
and Pascal Vasseur
3
1
Sup’Com Tunis, Ariana, Tunisia
2
Research Institute for Embedded Systems (IRSEEM-ESIGELEC), Saint Etienne du Rouvray, France
3
LITIS Lab, University of Rouen, Saint Etienne du Rouvray, France
Keywords:
Absolute Localization, Monocular vision, Structure-From-Motion, Autonomous vehicle, Vehicle Environ-
ment Perception.
Abstract:
In this paper, we propose an algorithm for estimating the absolute pose of a vehicle using visual data. Our
method works in two steps: first we construct a visual map of geolocalized landmarks, then we localize the
vehicle using this map. The main advantages of our method are that the localization of the vehicle is absolute
and that it requires only a monocular camera and a low-cost GPS. We firstly outline our method, then we
present our experimental results on real images using a reference database: the KITTI Vision Benchmark
Suite.
1 INTRODUCTION
In recent years, vision sensors have become ever more
common in vehicles and employed in many Advanced
Driver Assistance Systems (ADAS): pedestrian detec-
tion (Dollar et al., 2012), bird’s eye view for vehi-
cle surrounding monitoring (Liu et al., 2008), backup
cameras and lane departure warnings (Kozak et al.,
2006). ADAS were initially limited to luxury vehi-
cles but have now become available on high-volume
models. The multiplication of vision sensors in ve-
hicles has led to a reduction of costs and several dif-
ferent cameras can now be embedded. Besides the
fact that cameras are inexpensive sensors, their main
advantage is their versatility due to the huge quantity
of information they provide. A single camera can in-
deed perform several functions depending on the im-
plemented algorithms.
Through research on ADAS in the past few years,
vehicles have now reached level 2 of automation as
defined by SAE International’s On-Road Automated
Vehicle Standards Committee (SAE, 2015). This
level refers to partial automation, which means that
the vehicle can execute steering, acceleration and de-
celeration but the driver has to monitor the driving
environment. Researchers and car manufacturers are
now seeking to reach level 5 of automation, which
is the level of full automation. From levels 3 to 5,
the vehicle must be able to localize itself accurately
and to collect information from its surrounding envi-
ronment. These localization and perception tasks can
be solved quite easily by adding new sensors such as
lidars (Light Detection and Ranging) since they pro-
vide a 3D structure of the scene with a high level of
accuracy and at a high rate. However, the constraints
of the automotive industry are not compatible with
such sensors. Costs are high and robustness is not
optimal due to the lidar’s mechanical parts. That is
why vision-based localization is of great interest and
the scientific community is working actively on this
topic.
In this paper, we propose to use a monocular cam-
era to localize the vehicle on an absolute map, which
is the first step towards vehicle automation. First,
a map is built using additional sensors, in particular
an IMU/RTK GPS system. This step can be carried
out by a specific vehicle and the map-building can be
done off-line. Then, we propose an on-line process
to localize the vehicle using only a monocular camera
and a low-cost GPS.
In Section 2, we set out the state of the art with
regard to vehicle localization using visual data. In
Section 3, we present our method to build the map,
and then to localize the vehicle within this map. Sec-
tion 4 is dedicated to the experimental results obtained
for the map-building and for the localization stages.
Lastly, in Section 5, we present a conclusion and iden-
tify several directions for future work.
Ouerghi, S., Boutteau, R., Merriaux, P., Ragot, N., Savatier, X. and Vasseur, P.
Absolute Localization using Visual Data for Autonomous Vehicles.
DOI: 10.5220/0005682105950601
In Proceedings of the 11th Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2016) - Volume 3: VISAPP, pages 597-603
ISBN: 978-989-758-175-5
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
597
2 RELATED WORK
Vehicle localization is a fundamental requirement in
robotics and intelligent transportation systems that
has been extensively tackled in the two main fields
dealing with robotics navigation namely Simultane-
ous Localization and Mapping (SLAM) (Durrant-
Whyte and Bailey, 2006) (Bailey and Durrant-Whyte,
2006) (Dissanayake et al., 2001) (Munguia and Grau,
2007) and real-time Structure From Motion or Visual
Odometry (Nister et al., 2006) (Maimone et al., 2007)
(Comport et al., 2010).
SLAM approaches have been rooted in the local
methods, operating in unknown environments, con-
structing a 3D model and estimating the camera pose
relative to it. One of the most successful approaches
to date is PTAM (Parallel Tracking and Mapping)
(Klein and Murray, 2007). PTAM builds keyframes-
based maps from data acquired by a monocular cam-
era and uses tracking to estimate camera pose rela-
tive to the map. This is achieved by two threads run-
ning in parallel: one thread tracks the camera posi-
tion relative to the existing map, and a second map-
ping thread integrates keyframes in the map and re-
fines the map by performing a global bundle adjust-
ment. Though PTAM provides good performance in
localization and map building, it was originally de-
signed for augmented reality applications in small
workspaces and is therefore not prepared to cope with
large-scale mapping involving loop closures and big
maps. To extend the range of map coverage, Paral-
lel Tracking And Multiple Mapping (PTAMM) (Cas-
tle and Murray, 2009) was proposed, allowing multi-
ple maps with automatic switching. However, maps
are limited in size and they are maintained indepen-
dently with local coordinate frames which could be
more adapted to robot navigation rather than vehicles
and transportation systems.
Another alternative to SLAM algorithms is the
place recognition approach that has been adapted in
SLAM to detect loop closures (Ho and Newman,
2007) (Mei et al., 2011) (Cummins and Newman,
2008). The most successful approach to date is FAB-
MAP (Cummins and Newman, 2010), a probabilis-
tic approach to image matching based on a ”visual
bag-of-words” model. FAB-MAP performs localiza-
tion on trajectories up to 1000km in length. De-
spite the impressive results of FAB-MAP, it is only
demonstrated on trajectories with one loop closure
for each location (Cummins and Newman, 2010).
It could consequently fail when revisiting the same
location several times, reducing therefore the recall
performance over time. An attempt to improve the
aforementioned performance is the CAT-SLAM sys-
tem (Maddern et al., 2012) performing the fusion of
the robot local movement with appearance informa-
tion using a particle filter.
In addition, any previous localization and map-
ping methods fail when they are tested in dynamic
environments, in environments with too many or very
few salient features or where there are partial or to-
tal occlusions which could justify the resort to the use
of a GPS in vulnerable situations. On the other hand,
the absolute localization is needed by several appli-
cations used in transportation systems, especially for
future ADAS systems based on car to car communi-
cation and assuming that all positions are known in
a global and therefore exchangeable reference frame
(Rockl et al., 2008). This motivated us to conceive a
low-cost robust absolute localization system aimed at
vehicles and transportation systems.
3 METHODOLOGY
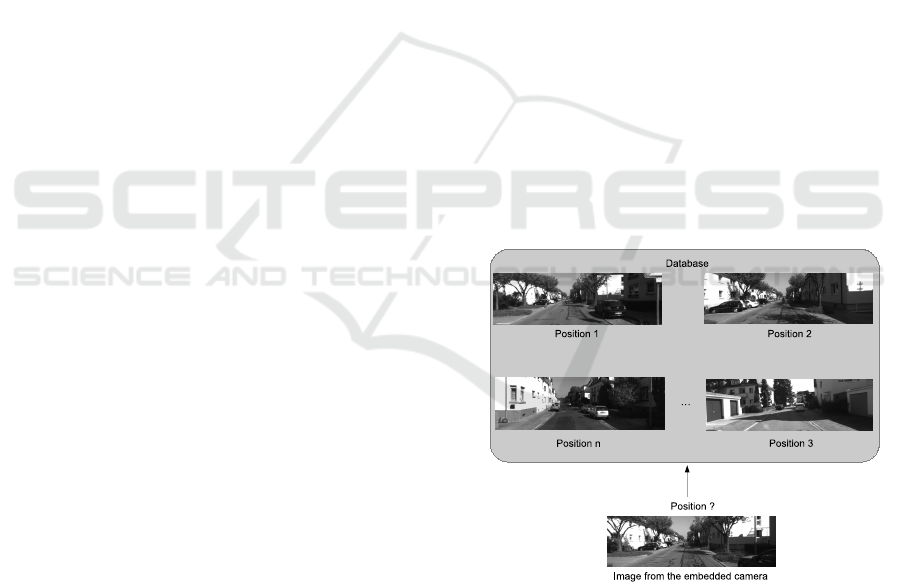
The general idea of our algorithm is to localize a cam-
era given a set of previously captured and geolocal-
ized images as described in Figure 1. Our method
is composed of two main steps: the map-building
of the geolocalized landmarks using geolocalized im-
ages, and then the localization within this map. In this
section, we describe the two stages.
Figure 1: General idea of our method: given a set of geolo-
calized images, find the pose of a camera.
3.1 Map-building
Map-building is the key step to obtaining an accurate
localization, so this step should be done carefully. If
the map is not accurate, or does not contain suffi-
cient robust features, localization will be very diffi-
cult, even impossible. To build the map, an instru-
VISAPP 2016 - International Conference on Computer Vision Theory and Applications
598
mented vehicle has to be driven manually. This ve-
hicle contains a very accurate localization system. In
the KITTI dataset (Geiger et al., 2012) (Geiger et al.,
2013), this system is composed of an IMU and an
RTK-GPS. This system provides the vehicle’s pose
with accuracy within a few centimeters and high fre-
quency (100 Hz). In our experiments, we only need
the IMU/GPS measurements and the images from a
monocular grayscale camera.
Once the acquisition has been done, we need to
process the data to build a compact and representative
map. Indeed, a sequence of a few kilometers gener-
ates several gigabytes of images, so we need to cre-
ate a more compact database if we want it to be em-
bedded in the vehicle. Instead of keeping all the im-
ages, the first step is to select only a few key images.
This is achieved by detecting and matching keypoints
between consecutive frames. Let the first image be
considered as a keyframe. We detect and match the
keypoints with the following frames. If the number
of matches is too high, it means that the two images
are very close visually, so the second frame is not a
keyframe. We consequently need to define a thresh-
old (500 in our experiments) below which there are
not enough matched keypoints and a new keyframe is
considered. The selection of keyframes has two ad-
vantages: first, the compression of the database by
keeping only a few images, and second it ensures that
there is motion between two frames. In the case of
a stopped vehicle, if all the images are used, there
is no distance between two images and the triangu-
lation step is consequently impossible. Another way
to build the map could be to use spatial discretiza-
tion, for example by taking a keyframe every 3 me-
ters. However, in the case of a rotation, we need more
keyframes than in the case of a translation since the
images vary quickly. To reject false matches, the fun-
damental matrix is computed using a RANSAC (Ran-
dom Sample Consensus) scheme. The computation
of the fundamental matrix is done using the Eight-
Point algorithm (Hartley, 1997). The Five-Point al-
gorithm (Nister, 2004) should provide the essential
matrix with better accuracy than the Eight-Point al-
gorithm but is considerably slower. In fact, what is
important at this stage is not accuracy, but the rejec-
tion of false matches.
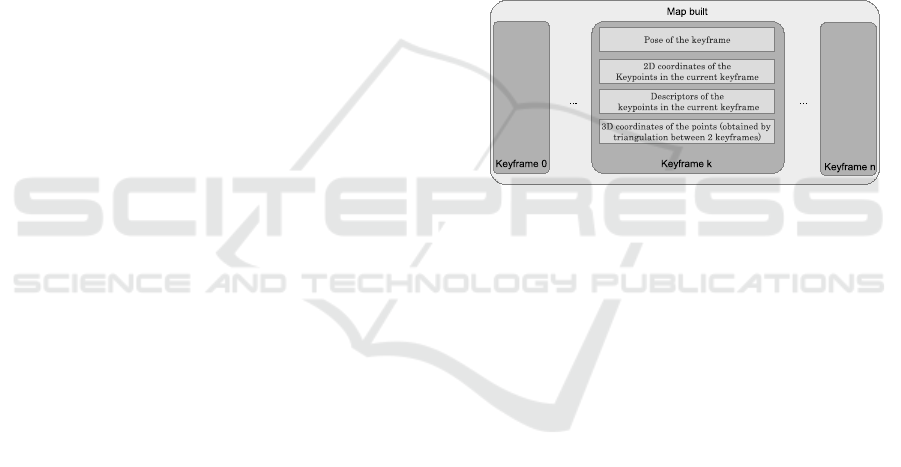
Our method relies on the use of keypoints so each
image is compressed into a set of keypoints and their
associated descriptors, as illustrated in Figure 2. Con-
sequently, for each keyframe, keypoints are matched
with the following keyframe. To do so, we use a bi-
nary descriptor, FREAK (Fast Retina Keypoint (Alahi
et al., 2012)). It is advantageous because it detects
keypoints quickly, and requires little memory. More-
over, the computation of similarities between descrip-
tors is very fast because the Hamming distance can
be used instead of the Euclidean distance. These key-
points are then triangulated using the poses provided
by the IMU/GPS system. This is possible thanks to
the high accuracy of this system, especially compared
to the motion between two keyframes. This method
has many advantages. 3D points are geolocalized
and there is not the drift that exists in visual odom-
etry systems. In addition, computation time is much
shorter than that of SFM approaches that use bundle
adjustment with loop-closure for example. For each
keyframe, we store the keypoints, their descriptors
and the computed 3D coordinates of the correspond-
ing points. All this data represents only hundred of
kilobytes, which is considerably smaller than the size
of an image in memory.
Figure 2: Constitution of the map built.
3.2 Localization
The mapping is now achieved and we have a database
which contains, for each keyframe, the absolute posi-
tion of the keyframe, the keypoints, their descriptors
and the corresponding 3D points. The localization
can now take place. In the localization process, we do
not need the costly IMU/RTK-GPS system. The lo-
calization can be done using only a monocular camera
and a low-cost GPS. The aim of the localization is, for
each image captured by the camera, to find the pose
of the camera in an on-line process (contrary to the
map building which can be done off-line). To local-
ize the vehicle, we need to find the nearest keyframe
in the database. This is achieved using the low-cost
GPS to have an initial guess of the position. Once the
nearest keyframe is identified, the keypoints are de-
tected in the current frame and then matched against
it. The outliers are rejected using the fundamental
matrix estimation with a RANSAC scheme. The 2D
points of the current frame are now linked to those of
the keyframe and consequently to their corresponding
3D points.
The localization is achieved by solving a
Perspective-n-Point problem. The PnP problem, also
known as pose estimation, was first introduced by
Absolute Localization using Visual Data for Autonomous Vehicles
599
Fischler and Bolles (Fischler and Bolles, 1981). It
consists in estimating the relative pose of a camera
and an object knowing the position of n features in
the object coordinate system and their projections in
the image. Given a set of n correspondences be-
tween 3D points M
i
=
X
i
Y
i
Z
i
1
T
expressed
in a world reference frame and their 2D projections
m
i
=
u
i
v
i
1
T
, we look for the transformation
R, t from the world coordinate system to the camera
coordinate system given by equation 1. To do so, we
minimize the reprojection error E defined in equation
2, where P is the projection function which depends
on the camera’s pose and on the 3D coordinates of the
points.
s
u
i
v
i
1
= K[R|t]
X
i
Y
i
Z
i
1
(1)
E =
n
∑
i=1
k
P(R, t, M
i
) − m
i
k
2
(2)
The minimum number of correspondences to ob-
tain a unique solution is n = 4. However, a larger
set of points is required to obtain a more robust solu-
tion, using a RANSAC scheme (Fischler and Bolles,
1981). It is necessary because some 3D points may be
incorrect (due to bad matches for example), and a lin-
ear estimation will provide an erroneous estimation of
the relative pose if no outlier rejection is carried out.
4 EXPERIMENTAL RESULTS
We have evaluated our approach on the KITTI Vision
Benchmark Suite. The KITTI database provides the
images from the camera, their poses provided by the
IMU/RTK GPS system, and the calibration matrix of
the camera. We have built our map of geolocalized
landmarks as described in Section 3 from the images
of the left grayscale camera mounted on the vehicle.
This camera is a Point Grey Flea 2 camera with a res-
olution of 1384x1032 (1.4MP) working at 10 frames
per second. The images are rectified and cropped in
the database so the final resolution is 1241x376 and
the distance between two images is around 80cm.
4.1 Map building
Table 1 summarizes the results obtained for the
map-building process. As we can see, the size of
the database we obtained is forty times smaller than
the one of the original KITTI database. The number
of keyframes is four times smaller than the number
of images of the KITTI database, which leads to a
keyframe every 3m instead of 80cm.
Table 1: Comparison between the KITTI database and the
map built.
KITTI
database
Map built
Number of poses
4540 1361
Mean distance
between two poses
(cm)
80 320
Size (MB)
1126 26
The rejection of outliers can be done using the
Eight-Point or the Five-Point algorithms as discussed
in Section 3. To justify our choice of using the
Eight-Point algorithm, the computation time and the
proportion of inliers are listed in Table 2. As we can
see, the Five-Point algorithm is five times slower
than the Eight-Point but the proportion of inliers is
approximately the same for the two algorithms. As
we are only interested in correctly matched points,
and not in the estimated fundamental or essential
matrix, the Eight-Point algorithm is sufficient. Figure
3 shows a matching example between two keyframes
after outlier rejection.
Table 2: Comparison between 8-Point and 5-Point algo-
rithms.
Five-Point
algorithm
Eight-
Point
algorithm
Computation
Time
52 ms 11 ms
Proportion of
inliers
59% 55 %
4.2 Localization
Our algorithm was evaluated on a sequence of the
KITTI database. As there is no low-cost GPS in this
dataset, we find the nearest keyframe using the ground
truth value of the vehicle’s pose and adding a random
VISAPP 2016 - International Conference on Computer Vision Theory and Applications
600
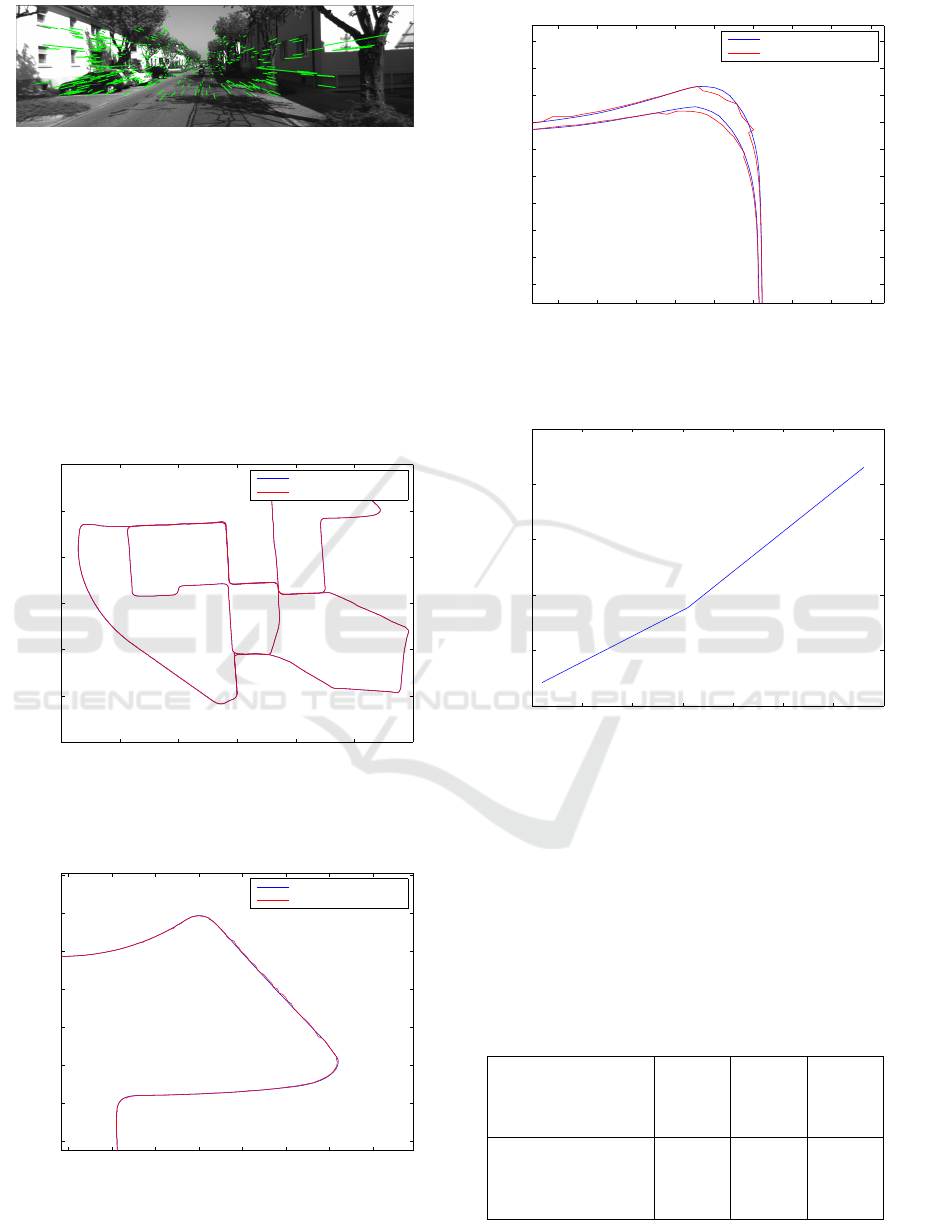
Figure 3: An example of matching (in green) between two
keyframes after outlier rejection.
noise of ± 5 meters. Figures 4, 5 and 6 show the
estimated trajectory compared with the ground truth
from the IMU/RTK GPS. The mean error is around
17 centimeters, which is sufficient to control a ve-
hicle autonomously. As shown in Figure 6, there
are sometimes discontinuities between two estimated
poses, which could be eliminated using a Kalman Fil-
ter (Kalman, 1960). The measure of the estimation
confidence could be the reprojection error of the 3D
points into the image.
−300 −200 −100 0 100 200 300
−100
0
100
200
300
400
500
Trajectory of the vehicle
Ground Truth Trajectory
Estimated Trajectory
Figure 4: The estimated trajectory (red line) and the ground
truth trajectory (blue line).
120 140 160 180 200 220 240 260
360
380
400
420
440
460
480
500
Trajectory of the vehicle
Ground Truth Trajectory
Estimated Trajectory
Figure 5: Zoom on a portion of the trajectory. The estimated
trajectory is in red and the ground truth trajectory in blue.
−45 −40 −35 −30 −25 −20 −15 −10 −5
362
364
366
368
370
372
374
376
378
380
Trajectory of the vehicle
Ground Truth Trajectory
Estimated Trajectory
Figure 6: Zoom on a portion of the trajectory. The estimated
trajectory is in red and the ground truth trajectory in blue.
3 4 5 6 7 8 9 10
0.2
0.25
0.3
0.35
0.4
Figure 7: Evolution of the localization error with respect to
the distance between two keyframes.
Table 3 and Figure 7 represent the error of the esti-
mated trajectories when we decrease the threshold on
the number of matches to determine whether an image
is a keyframe or not. As we can see, the error grows
slowly, and when there is only one image every 10
meters, the number of matches becomes insufficient
to correctly estimate the camera’s pose.
Table 3: Evolution of the mean error with respect to the
distance between keyframes.
Mean distance
between two
keyframes (m)
3.2 6.1 9.6
Mean error of the
estimated trajec-
tory (m)
0.17 0.23 0.36
Absolute Localization using Visual Data for Autonomous Vehicles
601

5 CONCLUSION AND FUTURE
WORK
In this paper, we have presented a new method for the
absolute localization of a vehicle using visual data.
First, a selection of keyframes is made to reduce the
complexity and the size of the database. Then, the
keypoints of these keyframes are matched and trian-
gulated to obtain 3D points. As our images are geolo-
calized, we obtain a map of geolocalized 3D points,
their associated keypoints and descriptors. The map-
building needs to be done only once, so this step
can be carried out off-line. The localization is then
achieved on-line, using the previously built map. For
each frame from the camera mounted on the vehicle,
the keypoints are detected, their descriptors computed
and matched with the nearest keyframe. This provides
the points in the image and their associated 3D points,
so the pose of the camera can be found using a PnP ap-
proach. Our method has been evaluated on the KITTI
dataset and gives precise results for the localization of
the vehicle.
Our future works will focus on the problem of
robustness to improve the results when changes ap-
pear between the acquisition of the map and the lo-
calization step. These changes can be due to light
changes, season changes and/or appearance or dis-
appearance of objects (cars, pedestrians, etc). This
could be achieved for example by using multiple fea-
ture fusion.
ACKNOWLEDGEMENTS
This work was supported by the VIATIC project. VI-
ATIC has been funded by the French Armaments
Procurement Agency (DGA) and managed by the
French National Research Agency (ANR) under the
ASTRID-MATURATION 2014 call.
REFERENCES
Alahi, A., Ortiz, R., and Vandergheynst, P. (2012). Freak
: Fast retina keypoint. In IEEE Conference on Com-
puter Vision and Pattern Recognition (CVPR), Provi-
dence, Rhode Island, USA.
Bailey, T. and Durrant-Whyte, H. (2006). Simultaneous lo-
calization and mapping (slam): Part ii. Robotics and
Automation Magazine, 13(3):108–117.
Castle, R. and Murray, D. (2009). Object recognition
and localization while tracking and mapping. In
IEEE/ACM International Symposium on Mixed and
Augmented Reality (ISMAR), pages 179–180, Or-
lando, USA.
Comport, A., Malis, E., and Rives, P. (2010). Real-time
quadrifocal visual odometry. International Journal of
Robotics Research (IJRR), 29(2-3):245–266.
Cummins, M. and Newman, P. (2008). Fab-map: proba-
bilistic localization and mapping in the space of ap-
pearance. International Journal of Robotics Research
(IJRR), 27(6):647–665.
Cummins, M. and Newman, P. (2010). Highly scalable
appearance-only slam fab-map 2.0. International
Journal of Robotics Research (IJRR).
Dissanayake, M., Newman, P., Clark, S., Durrant-Whyte,
H., and Csorba, M. (2001). A solution to the simul-
taneous localization and map building (slam) prob-
lem. IEEE Transactions on Robotics and Automation,
17:229–241.
Dollar, P., Wojek, C., Schiele, B., and Perona, P. (2012).
Pedestrian detection: An evaluation of the state of the
art. IEEE Transactions on Pattern Analysis and Ma-
chine Intelligence (PAMI), 34(4):743 – 761.
Durrant-Whyte, H. and Bailey, T. (2006). Simultaneous lo-
calization and mapping: Part i. Robotics and Automa-
tion Magazine, 13(2):99–110. ISSN: 1070-9932.
Fischler, M. and Bolles, R. (1981). Random sample consen-
sus : A paradigm for model fitting with applications to
image analysis and automated cartography. In Com-
munications of the ACM, volume 24, pages 381–395.
Geiger, A., Lenz, P., Stiller, C., and Urtasun, R. (2013).
Vision meets robotics: The kitti dataset. International
Journal of Robotics Research (IJRR).
Geiger, A., Lenz, P., and Urtasun, R. (2012). Are we ready
for autonomous driving ? the kitti vision benchmark
suite. In IEEE Conference on Computer Vision and
Pattern Recognition (CVPR), Providence, Rhode Is-
land, USA.
Hartley, R. (1997). In defense of the eight-point algorithm.
IEEE Transactions on Pattern Analysis and Machine
Intelligence (PAMI), 19(6):580–593.
Ho, K. and Newman, P. (2007). Detecting loop closure with
scene sequences. International Journal of Computer
Vision (IJCV), 74(3):261–286.
Kalman, R. (1960). A new approach to linear filtering
and prediction problems. Transactions of the ASME
- Journal of Basic Engineering, 82(Series D):35–45.
Klein, G. and Murray, D. (2007). Parallel tracking and map-
ping for small ar workspaces. In IEEE/ACM Interna-
tional Symposium on Mixed and Augmented Reality
(ISMAR), Nara, Japan.
Kozak, K., Pohl, J., Birk, W., Greenberg, J., Artz, B., Blom-
mer, M., Cathey, L., and Curry, R. (2006). Evalua-
tion of lane departure warnings for drowsy drivers. In
Human Factors and ergonomics society, pages 2400–
2404.
Liu, Y., Lin, K., and Chen, Y. (2008). Birds-eye view vision
system for vehicle surrounding monitoring. Robot Vi-
sion, 4931:207–218.
Maddern, W., Milford, M., and Wyeth, G. (2012). Cat-slam:
probabilistic localisation and mapping using a contin-
uous appearance-based trajectory. International Jour-
nal of Robotics Research (IJRR), 31(4):429–451.
Maimone, M., Cheng, Y., and Matthies, L. (2007). Two
years of visual odometry on the mars exploration
VISAPP 2016 - International Conference on Computer Vision Theory and Applications
602

rovers. Journal of Field Robotics (JFR), Special is-
sue on Space Robotics, 24:169186.
Mei, C., Sibley, G., Cummins, M., Newman, P., and Reid,
I. (2011). Rslam: A system for large-scale mapping
in constant-time using stereo. International Journal of
Computer Vision (IJCV), 94(2):198–214.
Munguia, R. and Grau, A. (2007). Monocular slam for vi-
sual odometry. In IEEE International Symposium on
Intelligent Signal Processing, pages 1–6.
Nister, D. (2004). An efficient solution to the five-point
relative pose problem. IEEE Transactions on Pattern
Analysis and Machine Intelligence (PAMI), 26:756–
770.
Nister, D., Naroditsky, O., and Bergen, J. (2006). Visual
odometry for ground vehicle applications. Journal of
Field Robotics (JFR), 23.
Rockl, M., Gacnik, J., and Schomerus, J. (2008). Integra-
tion of car-2-car communication as a virtual sensor
in automotive sensor fusion for advanced driver as-
sistance systems. In FISITA 2008 World Automotive
Congress.
SAE (2015). Sae international. In http://www.sae.org/.
Absolute Localization using Visual Data for Autonomous Vehicles
603
