
Efficient Authorization Authority Certificate Distribution in VANETs
Sebastian Bittl and Karsten Roscher
Fraunhofer ESK, Munich, Germany
Keywords:
Certificate Distribution, VANET, Security.
Abstract:
Car-to-X communication systems are about to enter the mass market in upcoming years. Security in these
networks depends on digital signatures managed by a multi-level certificate hierarchy. Thereby, certificate
distribution is critical in regard to channel utilization and data reception delay via security caused packet loss.
These issues are even more significant in case not only pseudonym certificates but also authorization authority
certificates have to be exchanged between nodes in the VANET. Prior work has not studied distribution of the
elements of a multi-level certificate chain in detail. Hence, this work provides an analysis of the currently
standardized mechanisms and identifies several drawbacks of the straight forward solution proposed so far.
Thereby, we find a severe denial of service attack on that solution. Moreover, the distribution problem is
found to be similar to the packet forwarding problem encountered in position-based routing. Thus, we study
several strategies for efficient distribution of a certificate chain in regard to channel load, which are adapted
from their counterparts in position-based routing. Thereby, we find that by combining pseudonym certificate
buffering with requester based responder selection the requirement for certificate chain distribution in VANETs
can be removed completely. Hence, the proposed design avoids the identified denial of service weakness and
reduces the worst case size of the security envelope of VANET messages by more than a third.
1 INTRODUCTION
Vehicular ad-hoc networks (VANETs) based on wire-
less Car-to-X communication are about to enter the
mass market in upcoming years. In both Europe and
the USA important progress is being made within the
European Telecommunications Standards Institute In-
telligent Transport Systems (ETSI ITS) and Wireless
Access in Vehicular Environments (WAVE) frame-
works (MoU, 2011; Harding et al., 2014). Security
of these systems is a core point of concern, as their
main use cases are safety critical advanced driver as-
sistance systems (ADAS). Thus, a security approach
based on digital signatures managed via a multi-level
certificate hierarchy has been developed.
For ETSI ITS, the certificate hierarchy consists of
three levels. These are given by the root certificate(s)
authorizing so called authorization authority certifi-
cates (AACs), which are used to authorize pseudonym
certificates (PSCs, also called authorization tickets)
(103, 2015). Thus, an authorization authority acts
as a certificate authority. WAVE does not limit the
number of certificate hierarchy levels, but the min-
imum amount is three. PSCs are used to sign an
ITS-station’s (ITS-S’s) messages, e.g., Cooperative
Awareness Messages (CAMs) or Basic Safety Mes-
sages (BSMs). To verify messages, the receiver needs
to know about the certificate chain of the receiver. In
order to avoid tracking of vehicles pseudonym cer-
tificates are changed rapidly by each ITS-S. Thus, it
is necessary to exchange certificates, except of the
root certificate(s) known to all stations, on demand
between participants in the VANET.
It has been shown that the overhead in message
size by certificate distribution leads to increased chan-
nel load, which can significantly decrease VANET
system performance (Kargl et al., 2008). Thus, band-
width efficient strategies for certificate distribution
are required. Nonetheless, recent work has focused
on distribution strategies of PSCs. In contrast, AAC
distribution, as required by a hierarchical certificate
chain approach, has not gained much attention so far.
A completely centralized scheme distributing all
certificate authority (CA) certificates to all ITS-S
from a back bone network, without ITS-S to ITS-S
dissemination, is described in (Morogan and Muftic,
2003). To avoid dependence on such back bone net-
work distribution, which would also require coopera-
tion of all CAs, both ETSI ITS and WAVE use a de-
centralized scheme. Thereby, an AAC is distributed
by all ITS-S using it, similar to the distribution of
ITS-S’s individual PSCs (103, 2015; WAV, 2013).
Bittl, S. and Roscher, K.
Efficient Authorization Authority Certificate Distribution in VANETs.
DOI: 10.5220/0005685600850096
In Proceedings of the 2nd International Conference on Information Systems Security and Privacy (ICISSP 2016), pages 85-96
ISBN: 978-989-758-167-0
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
85

The maximum size of the security envelope added
at the network layer of VANETs greatly influences
overall system design. It limits the size of higher layer
data sets, as the size of packets which can be handed
over to the lower level access layer is limited. Increas-
ing this limit is unsuitable, as this would significantly
deteriorate overall system performance, e.g., due to
an increase in collisions on the wireless channel.
AAC exchange between ITS-Ss in VANETs fol-
lowing ETSI ITS and WAVE standards is specified
in (103, 2015; WAV, 2013). However, we find that
the straight forward approach for certificate chain dis-
semination taken there can lead to significant peaks in
channel load. Moreover, the maximum size of the se-
curity envelope gets increased significantly by more
than a half compared to the preceding standard ver-
sion using only PSC distribution (103, 2013; 103,
2015). This is because an included certificate ac-
counts for more than 50% of the size of the entire
security envelope (Bittl et al., 2015b).
Moreover, the specified request mechanism for
AACs can be (mis-)used by an attacker to perform a
serious denial of service (DOS) attack on the VANET.
Thus, we propose an alternative AAC distribution
strategy. It combines multiple concepts like tempo-
rary buffering of unauthorized PSCs and AAC emis-
sion strategies inspired by packet forwarding algo-
rithms taken from position-based routing (often called
GeoNetworking within ETSI ITS).
The remainder of this work is outlined as follows.
At first, Section 2 provides a review of prior work.
Afterwards, Section 3 defines the problems addressed
in this work. New concepts for efficient AAC dis-
tribution are introduced in Section 4. An evaluation
of the proposed concepts is provided in Section 5.
Lastly, a conclusion about achieved results is given in
Section 6 together with possible topics of future work.
2 RELATED WORK AND
ATTACKER MODEL
This section provides a review of related work and
introduces the assumed attacker model.
2.1 Related Work
Security mechanisms within ETSI ITS and WAVE use
digital signatures to secure authenticity and integrity
of messages. Required parameters, e.g., public keys,
are contained in certificates, which are part of a multi-
hierarchy certificate chain. Thereby, a low number of
cross-signed root certificates acts as the common an-
chor of trust, provided to ITS-Ss during manufactur-
ing. Manufacturers of ITS-Ss, e.g., inside vehicles or
road side units (RSUs), also equip their devices with
their individual AAC alongside with PSCs.
AACs are used to secure PSCs, while PSCs are
used to sign sent messages. The used PSC is changed
frequently to avoid vehicle tracking. To enable re-
altime secured communication, participating ITS-S
have to exchange their corresponding AACs as well
as PSCs (103, 2015; Task Force PKI, WG Security
C2C-CC, 2012; 102, 2012a). Otherwise, receivers
cannot verify messages, which leads to so called cryp-
tographic packet loss, i.e., dropping of messages.
Both ETSI ITS and WAVE do not use dedicated
messages for certificate distribution. Instead, sporadic
piggybacking of such data on higher level messages,
e.g., cyclically sent CAMs or BSMs, is used. Explicit
and implicit requests are used for PSCs dissemination
as studied in (Bittl et al., 2015a). In contrast, only ex-
plicit requests are used for AACs. This is done to keep
the amount of transmissions of the certificate chain
low, as thereby the AAC is emitted together with the
currently used PSC. The overhead caused by includ-
ing a certificate into the so called security envelope
of a message is quite significant, almost doubling the
size of the whole message (Bittl et al., 2015b; 103,
2015). Thus, inclusion of PSC and AAC into the se-
curity envelope increases a message’s size by a fac-
tor of almost three. As many ITS-Ss share the same
AAC, e.g., all cars from the same manufacturer, ex-
change of this information can be expected to happen
with a much lower frequency then those of PSCs be-
ing individual to each ITS-S.
To the best of our knowledge, no detailed study
on AAC, or the general case of a multi-hierarchy cer-
tificate chain, distribution within current VANET ap-
proaches has been published so far. Closest related
work proposes a centralized distribution scheme for
all CA certificates in VANETs (Morogan and Muftic,
2003), an approach not used in current VANET stan-
dards (103, 2015; WAV, 2013).
Instead of studying hierarchical certification
schemes, prior work focused on decentralized CAs re-
siding within the VANET itself (Masdari and Barbin,
2012; Sen et al., 2007). However, such schemes do
not provide the high level of security provided by in-
frastructure based CAs (Masdari and Barbin, 2012).
An illustration of a message sequence exchanged
between two ITS-Ss A and B causing an AAC request
according to (103, 2015) is given in Figure 1. Mech-
anisms within WAVE are very similar. For a more
compact presentation, we stick to ETSI ITS notation.
Due to the various inclusion rules of PSCs into
CAMs it is also possible that the first message from
B received at A contains the PSC, e.g., due to cyclic
ICISSP 2016 - 2nd International Conference on Information Systems Security and Privacy
86

A
t
B
CAM w PSC
A
+ PSC
B
req.
CAM w/o PSC
A
+ AAC
B
req.
CAM w PSC
B
+ AAC
B
CAM w PSC
B
CAM w/o PSC
B
Figure 1: Message sequence leading to an AAC request.
inclusion of PSCs into CAMs. However, in both
cases an AAC request can only happen after station
A has already received the PSC of B (called PSC
B
in
Figure 1). This feature is used in the system optimiza-
tion approach suggested in Section 4.4.
An interesting finding is that requesting of
AACs shows similarities to multi-hop forwarding in
position-based routing (e.g., so called GeoNetwork-
ing in ETSI ITS). In both cases an ITS-S (security:
responder / GeoNetworking: forwarder) has to be se-
lected from a (possible) multitude of ITS-Ss possess-
ing the data, which should be delivered to another
ITS-S (security: requester / GeoNetworking: data
sink). To minimize channel load, multiple delivery
of the data to its destination should to be avoided.
In position-based routing mainly two mechanisms
exist to select a packet forwarder. These are sender
based and receiver based selection. A popular ap-
proach for selection of the packet forwarder by its
sender is called greedy forwarding (Sommer and
Dressler, 2015). Thereby, the sender tries to max-
imize a specific metric, typically the covered dis-
tance, by selecting a particular forwarder. More-
over, different mechanisms using distributed receiver
based forwarder selection, from the set of possible
forwarders, have been studied (Sommer and Dressler,
2015; F
¨
ußler et al., 2003; Blum et al., 2003; Heis-
senb
¨
uttel et al., 2004; F
¨
ußler et al., 2004). An im-
portant concept is the so called contention-based for-
warding (CBF) scheme (F
¨
ußler et al., 2003). It has
been shown that CBF outperforms its greedy forward-
ing counterpart in many scenarios. An overview of
this field is provided in (Sommer and Dressler, 2015).
2.2 Attacker Model
We assume a single, static and active attacker, e.g., us-
ing an RSU. Its location is unknown to the legitimate
ITS-Ss. Moreover, the attacker does not possess valid
cryptographic material to sign VANET messages.
3 PROBLEM STATEMENT
Two major issues are introduced by certificate chain
distribution in VANETs as briefly outlined in Section
1. They are discussed in Sections 3.1 and 3.2.
3.1 Normal VANET Operation
We assume normal VANET operation without pres-
ence of an attacker in this section. Requesting an
AAC leads to a peak in channel utilization, as every
receiver using the AAC includes its certificate chain in
its next CAM. AACs are shared between many cars,
e.g., such from the same manufacturer. To limit the
amount of AAC requests in general, long term buffer-
ing of such certificates is discussed in Section 4.1.
As outlined in Section 2, the AAC distribution
problem shows some similarities to packet forward-
ing within position-based routing protocols. Thus,
Sections 4.2 and 4.3 study possibilities to reuse con-
cepts from GeoNetworking protocols. The key differ-
ence between forwarding and an AAC response is that
for AAC requests the initial sender is identical to the
(end-)receiver. In contrast, for forwarding the initial
sender wants to deliver a packet to another ITS-S.
In general maximum message size within
VANETs is strictly restricted, e.g., to 650 bytes
in ETSI ITS (102, 2011). This is caused by the
lack of message fragmentation support in current
VANETs. Moreover, higher layer functionality does
not know when the network layer security entity is
about to include certificate(s) in a message inside
its so called security envelope (103, 2015). Thus,
always the maximum size of the security envelope
has to be reserved, which significantly limits the size
of higher level data sets. For example, 356 bytes
(security envelope meta data + PSC + AAC (103,
2015)) have to be reserved for the security envelope
within ETSI ITS, which is more than 50 % of the
maximum message size. Limiting the amount of
included certificates to one can limit the maximum
size of the security envelope. Thus, an approach
for such a limitation without introduction of extra
authentication delay is developed in Section 4.4.
It uses buffering of received but unverified PSCs
and is shown to work well in combination with the
responder selection approach from Section 4.2.
3.2 DOS Attack on AAC Distribution
To request emission of a stations certificate chain an
unsecured explicit AAC request is used in current
ETSI ITS and WAVE systems. This is similar to
the unsecured explicit PSCs request scheme looked
Efficient Authorization Authority Certificate Distribution in VANETs
87

at in (Bittl et al., 2015a) and standardized in (103,
2015). Thereby, the current design of the security
system requires the usage of unsecured messages to
trigger AAC and PSC distribution. The main reason
for this is the legitimate possibility of two (or even
more) ITS-Ss meeting without any prior knowledge
of each others certificate chains, except of the com-
monly known root certificate(s).
In such a case there is no possibility for perform-
ing a secured request for the certificate chain of an-
other ITS-S without sending the certificate chain of its
own ITS-S. Thus, an attacker without access to legiti-
mate cryptographic material can still misuse the AAC
request mechanism to significantly increase channel
load in the following way.
The attacker sends CAMs (or BSMs), which con-
tain just a varying random value as the signer iden-
tifier and identifiers of valid AACs in the so called
request unknown certificates header field of the secu-
rity envelope. The signature can be filled by random
values, too. Receivers cannot verify the attacker’s
messages, as they do not possess a PSC for the used
signer identifier (with high probability). Thus, the in-
valid signature will go unnoticed. The attacker can
obtain AAC identifiers for his requests from received
CAMs of legitimate ITS-Ss in his surrounding due to
cyclic inclusion of PSCs containing their correspond-
ing AAC identifier (103, 2015). Up to six AACs can
be requested in each CAM sent by the attacker.
In order to maximize the increase in channel load
caused by the attack, the attacker selects the AACs
used by the biggest share of ITS-S in its current sur-
rounding. Thereby, he maximizes the number of ITS-
Ss responding to his own CAMs by transmitting their
certificate chain together with their next CAM. Using
the maximum legitimate CAM generation rate (10 Hz
(103, 2015)), the attacker can be assumed to be able
to cause all successfully targeted ITS-Ss to include
their certificate chain in each of their sent CAMs.
Thereby, the channel load caused by these stations
gets increased threefold.
In the worst case, all ITS-Ss in the attackers com-
munication range only use six different AACs. Thus,
he can target all these ITS-Ss. Hence, it can be ex-
pected that the channel load is increased by a fac-
tor of more than three. In case the wireless channel
does not provide enough spare capacity to allow for
transmission of the increased data volume, message
sending by the ITS-Ss will be massivly delayed (by
CSMA-CA waiting times). Moreover, the probabil-
ity of collisions on the wireless channel is increased
significantly. Thus, the attacker has performed a suc-
cessful denial of service attack against ITS-Ss.
Furthermore, as the attacker does not provide a
valid PSC in its CAMs but only a random hash value,
he also causes all vehicles with in its communication
range to always include their PSC within every sin-
gle CAM. This attack on the unsecured implicit cer-
tificate request scheme is described in detail in (Bittl
et al., 2015a). Thereby, it was shown that channel
usage of all targeted stations can be more than dou-
bled. Additionally, the area of effect of the attack is
not limited to the broadcast area of the attacker. In-
stead, the increase in channel usage will only vanish
at about two times the communication range of the
attacker (Bittl et al., 2015a).
Section 5 provides an evaluation of the outlined
attack alongside with the influence of efficiency in-
creasing mechanisms proposed in the next section.
4 EFFICIENT AA CERTIFICATE
DISTRIBUTION
To allow ITS-Ss to verify the authenticity of other
ITS-Ss’ PSCs AA certificates (AACs) are used. The
impact of the distribution of such AACs on VANET
system performance is outlined in Section 3 giving
the general problem statement. Multiple approaches
to overcome the outlined performance issues are dis-
cussed in Sections 4.1 to 4.4.
4.1 Long Term AA Certificate Buffering
In contrast to PSCs, the same AAC will be used by
a multitude of ITS-Ss, e.g., by all vehicles from the
same manufacturer running its own authorization au-
thority. Moreover, the lifetime of AACs can be ex-
pected to be much longer than the one of PSCs, as
there is no requirement for pseudonymity of AACs.
Thus, the exchange rate of AACs can be expected
to be significantly limited by permanently buffering
received AACs in the HSM (hardware security mod-
ule containing the secure storage of cryptographic
material) of an ITS-S after its verification by the help
of stored root certificates. Otherwise, an ITS-S has to
request all AACs anew each time it starts up. Thus, in
areas with many vehicle upstarts, e.g., parking spaces,
there will always be a high amount of AAC requests.
Current VANET standards do not specify how
long a receiver should keep a received certificate.
Clearly, there is a trade off between additional mem-
ory space requirements inside the HSM and the de-
crease in channel load by sparing AAC emissions.
However, the overall number of AACs can be ex-
pected to be limited and the impact on channel load by
AAC emission can be significant, at least for the cur-
rently standardized approach as shown in Section 5.2.
ICISSP 2016 - 2nd International Conference on Information Systems Security and Privacy
88

4.2 Requester Selection of Responder
One possibility to avoid multiple AAC deliveries af-
ter an AAC request is to let the requester especially
choose an ITS-S who should respond to the request.
In GeoNetworking forwarder selection by the sender
is often realized via a greedy forwarding approach.
Thus, we call such kind of requester selection of the
responder to an AAC request greedy responding.
This approach can be simply implemented within
the current ETSI ITS framework. The requester just
adds the ID of the PSC (of the asked ITS-S) along-
side with the ID of the AAC in the so called “request
unrecognized certificates” header field of the security
envelope. According to (103, 2015), this ID would be
the so called HashedID3 of the corresponding certifi-
cate. It is determined by taking the lowest three bytes
of the SHA-256 hash value of the certificate. This ap-
proach would mean that an ITS-S would only respond
to an AAC request in case also its own PSC gets re-
quested within the same request.
The impact of the DOS weakness from
Section 3.2 is limited by a limited maximum
length of the request list. E.g., at most six IDs are
used within ETSI ITS. Thus, only the next messages
of five ITS-Ss can be enlarged by the attack. Without
presence of an attacker, only one ITS-S will respond
to the request instead of a possible multitude of them.
However, effectiveness of requester based selec-
tion faces a major drawback. AAC requests typically
occur when the environment of a vehicle is changing.
Therefore, the requester may not be aware of all ve-
hicles within its (new) communication area. Thus, re-
sponder selection may be sub-optimal as some avail-
able responder candidates for the selection process
may be unknown to the requester or stations known
to the requester left its communication range.
Possible selection mechanisms based on positions
or sending times of known ITS-S in the requester’s
surrounding are discussed in the following sections.
Clearly, such mechanisms are only required in case
the set of possible responders to an AAC request has
more than a single member.
4.2.1 Position based Selection
The requester chooses the AAC provider in a way
to maximize probability for a successful bidirectional
communication (request and response). Thereby, dif-
ferent strategies can be used, which are a
• simple strategy just using the position of possible
responders, and
• advanced strategies using an environment model
of the requester ITS-S.
Required data like position, speed and heading of
ITS-Ss is contained in cyclically distributed messages
(CAMs / BSMs). For the simple strategy, the re-
quester minimizes the distance between both ITS-Ss.
Thereby, it tries to maximize chances that the chosen
ITS-S really receives the request and also its reply is
successfully delivered to the requester. This strategy
assumes that the probability of two ITS-Ss exchang-
ing data successfully increases with decreasing dis-
tance between these ITS-Ss. This strategy is used in
the evaluation provided in Section 5.2.
Advanced strategies could use a model describing
the communication conditions within the requester
ITS-S’s environment. An approach to generate such a
model, which is among other inputs based on digital
maps, is described in (Boban, 2012). However, real
time maintenance of such models is still a challenge
due to high computational requirements.
Clearly, this approach does not guarantee to an-
swer the request in minimal possible time. Time
to delivery of the AAC (t
delivery
) is determined
by both CAM generation intervals at requester
(∆t
CAM,requester
) and responder (∆t
CAM,responder
) due to
the used piggybacking strategy for AAC distribution.
t
delivery
≤ ∆t
CAM,requester
+ ∆t
CAM,responder
Thus, it can take up to two seconds until the AAC re-
quest gets answered. Due to high mobility of ITS-Ss
in VANETs, it is quite likely that the responder is no
longer the closest possible responder when it trans-
mits the AAC to the requester. Therefore, this method
has to be regarded as sub-optimal. However, it pro-
vides the benefit of simplicity. In order to reduce
the chance of a long time span until AAC delivery,
the following strategy uses the next expected sending
time as the main criteria to select the responder.
A similar approach from packet forwarding is to
try to cover the maximum possible distance towards
the (final) receiver by each forwarding hop. Due to
this maximization the approach is called a greedy one.
4.2.2 Sending Time based Selection
An AAC requester can try to minimize the time span
∆t until the requested AAC is delivered. In systems
using fixed message sending intervals, e.g., WAVE,
the receiver can directly calculate the next sending
time of all stations from whom he received messages
based on the contained sending time stamps (within
the security envelope). However, for CAMs in ETSI
ITS message generation rate varies (302, 2014).
The current CAM generation interval of an ITS-S
is determined from vehicle dynamics, e.g., speed or
turn rate, which are themselves part of CAMs. More-
over, the current generation interval is contained in
Efficient Authorization Authority Certificate Distribution in VANETs
89

every CAM. Assuming that vehicle dynamics are
quite constant in the short time span between genera-
tion of two CAMs, the receiver of a CAM can deter-
mine a hypothesis about the next CAM sending time.
4.2.3 Position and Time based Selection
Advanced strategies could combine position and time
information to improve AAC distribution in compari-
son to simple strategies like the ones proposed before.
An approach could use trajectory prediction to ob-
tain an hypothesis about the future position of a pos-
sible responder at the point in time it is to send its
next message. Afterwards, the position-based selec-
tion algorithms from Section 4.2.1 can be used with
the position hypothesis as the input instead of the last
received position. However, to obtain the parameters
of the trajectory model, the requester has to analyze
message content which could not be verified in ad-
vance, e.g., the speed of other ITS-S inside the CAM
content. Thus, an attacker can try to send malicious
messages to the message parser.
Another approach to combine time and position
information is to use a weighting function. Thereby,
each possible responder i is assigned a weight r
w
,
which characterizes its feasibility as a responder.
r
w
= w
1
· d
i
+ w
2
· ∆t
i
The individual weighting factors w
1
and w
2
can deter-
mined offline via simulation based evaluation of dif-
ferent scenarios leading to AAC requests. As both
criteria d
i
and ∆t
i
should be small to ensure success-
ful rapid AAC delivery, low values of r
w
show better
responder feasibility than high ones. Thus, the ITS-S
with lowest assigned value of r
w
should be selected.
Adaptation the weights to current communication
conditions is probability hard to realize, as AAC dis-
semination will not occur frequently in practice.
A more detailed analysis on advanced multi crite-
ria based responder selection is subject to future work.
4.2.4 Attacking Requester Selection
An attacker can try to deny an ITS-S from obtaining
an AAC by sending messages to the requester, which
will always make him the target of the AAC request.
For example, the attacker can claim to be very close to
the requester. In case simple position-based responder
selection is applied at the requester, the attacker will
be the target of the request with high probability. Af-
ter receiving the request, the attacker simply drops it.
Thus, the ITS-S does not receive the AAC it wants to
know about until it selects another responder.
However, to carry out the attack, the attacker
needs to claim its availability as a possible respon-
der in advance to the request. This means, that the
attacker would need to know that a targeted ITS-S
does not know about a certain AAC which it needs
to know about. This is clearly an internal status of the
ITS-S, which is not known to other ITS-Ss until the
request has been transmitted. Thus, the feasibility of
the outlined attack to be carried out in practice can be
expected to be very low.
4.3 Decentralized Responder Selection
Decentralized receiver based selection of a forwarder
in GeoNetworking, e.g., via contention-based for-
warding (CBF), was shown to outperform the greedy
forwarding approach (F
¨
ußler et al., 2004). In anal-
ogy to CBF we call our approach contention-based
responding (CBR). To request an AAC one just sends
out the request, e.g., as in (103, 2015). However, the
number of responses to the request is limited by de-
centralized coordination among possible responders.
After reception of an AAC request, all proper re-
ceivers start a timer. The AAC is only included af-
ter a timeout has happened. In case inclusion of the
AAC by another ITS-S is detected before own AAC
inclusion, the timer is canceled and the AAC is not in-
cluded. Appropriate selection of the required timeout
values is discussed in Sections 4.3.1 and 4.3.2.
This approach includes all possible responders
into the responder selection process. Thus, the prob-
lem of incomplete knowledge about an ITS-S’s en-
vironment, as outlined in Section 4.2 for the greedy
approach, can be overcome.
4.3.1 Position and Timeout based Responding
The initial proposals of CBF in (F
¨
ußler et al., 2003;
F
¨
ußler et al., 2004) suggest to use position and time
based selection of forwarders. As initial sender and
(final) target of the AAC request are identical, the se-
lection criteria of CBF has to be changed to obtain a
suitable CBR concept.
Thus, the timeout function of CBF (F
¨
ußler et al.,
2004) is modified to obtain the CBR timeout function
t =
(
t
CAM,i
·
1 −
d
i
d
max
0 ≤ d
i
< d
max
∞ otherwise
. (1)
Additionally, as in CBF an ITS-S which monitors that
another ITS-S answered the request cancels its own
timeout and thus does not include the AAC itself.
The intended effect of Equation 1 is illustrated in
Figure 2.
Thereby, the most left vehicle has just sent out an
AAC request. The time until the next message is to
be sent by the individual vehicles t
CAM,i
is illustrated
via the filled part of (right) cycles next to the vehicles.
ICISSP 2016 - 2nd International Conference on Information Systems Security and Privacy
90

Figure 2: Response times under combined position and time
CBR and pure timeout based responding.
The left cycle illustrates the effect of applying Equa-
tion 1 to calculate the timeout until responding with
an AAC being included in the security envelope. The
initial sender of the request has no such timeout.
One can see that the right vehicle is the first one to
send a message after the AAC request, but it is not go-
ing to include the AAC into this message as the time-
out will happen after sending the message.
As this approach minimizes the distance between
requester and responder d
i
, the set of vehicles receiv-
ing the response can be assumed to be similar to the
set of vehicles which received the request. Thus, the
amount of unnecessary extra responses caused by the
hidden station problem should be low.
However, as many vehicles share the same AAC,
it is pretty likely that the AAC requester will receive
more than one CAM with the same AAC being part
of their corresponding certificate chains. All these
messages have to be discarded, as they cannot be val-
idated. This is called cryptographic packet loss in
(Feiri et al., 2012). The strategy proposed in the next
Section 4.3.2 tries to minimize such packet loss at the
cost of increased probability for duplicate responses.
4.3.2 Pure Timeout based Responding
A simpler variant for decentralized responder selec-
tion is given by using only a responding timeout and
discarding the location information used in the above
outlined approach from Section 4.3.1. The straight
forward timeout period is given by the time until the
next message is sent. Like in the concept proposed in
the section before, an ITS-S cancels its timer when it
receives a response from another station.
This concept minimizes the time span until the re-
quest is answered. Thus, probability of cryptographic
packet loss by discarding CAMs from other ITS-Ss
also using the requested AAC is minimized, too.
However, as the distance between requester and
responder is discarded, the set of vehicles receiving
the first response can differ significantly from the set
of vehicles which received the request. Thus, the
probability of duplicate replies is much higher for this
strategy than for the one proposed in Section 4.3.1.
Moreover, the responder could leave the commu-
nication range of the requester before sending the re-
sponse. In the worst case, all other responders still
receive the response. Hence, they cancel their own
responses. Thus, the requester does not receive any
response. To avoid this scenario, a responder can keep
track of its current average communication range and
check whether the position of the requester is within
this range before sending the response. Otherwise, it
should not send the response. This improvement can
be used for the strategy from Section 4.2.2, too.
The pure timeout based concept is also illustrated
in Figure 2 (right timeout). In contrast to CBR the
most right vehicle will send the requested AAC to the
requester and the vehicle in the middle will suppress
its own AAC transmission.
4.4 Pseudonym Certificate Buffering
According to (103, 2015), an ITS-S whose AAC was
requested has to include its certificate chain, contain-
ing the AAC and the current PSC, in the security en-
velope of its next message. However, a request for an
AAC can only happen in case the sender had already
received the station’s PSC using the requested AAC
before (see also Figure 1).
In order to remove the need for a transmission of
PSC
B
alongside with its corresponding AAC
B
, station
A could store PSC
B
in a buffer for later verification
before requesting AAC
B
. This means that station B
just has to send a message (e.g., CAM) containing a
single certificate shortening the message by more than
33% or about 133 bytes (103, 2015).
However, the mechanism is somehow more com-
plicated when the scenario is extended to multi-
ple communicating vehicles and multiple possible
senders of the AAC. In this case, an ITS-S receiving
a AAC request for its own used AAC cannot know
whether itself caused this request or it was caused
by another ITS-S using the same AAC. This can be
changed by also applying the greedy requester selec-
tion algorithm from Section 4.2 before.
The combination of these two mechanisms is es-
pecially powerful. It enables to remove sending of
certificate chains (containing PSC and AAC in a
single message) completely from current standards.
ITS-Ss only have to send either their PSC or their used
AAC in the security envelope of CAMs, while there
is no longer the requirement to send both of them at
once. Thus, the worst case length of the security en-
velope can be reduced significantly by the size of a
full certificate. The overall size of a message handed
over the access layer is typically limited, e.g., in ETSI
ITS to about 650 bytes (102, 2011). Thus, a shortened
Efficient Authorization Authority Certificate Distribution in VANETs
91

worst case size of the security envelope leaves more
message length to higher level protocols.
In contrast, in the CBR algorithm the AAC sender
cannot know whether he caused the AAC request.
Thus, combination of this approach is not possible
with PSC buffering as it is outlined above. There-
fore, the emission of a certificate chain, which con-
tains PSC as well as AAC, is required for CBR for the
responder to the request. Thus, CBR cannot limit the
worst case size of a CAM security envelope as greedy
responding together with PSC buffering can do.
Thus, there is a trade off between greedy respond-
ing and CBR. Thereby, CBR can be expected to pro-
vide the AAC with higher probability to the requester,
as it can be assumed to be less susceptible to packet
loss than its counterpart. However, greedy responding
together with PSC buffering will yield less channel
usage and a system design advantage. Hence, in detail
evaluation of both strategies is required to show which
one provides better VANET system performance.
To avoid a need for huge storage space for unau-
thorized certificates, one can remove them from the
buffer after a timeout somewhat larger then the max-
imum sending interval of CAMs (which are used to
distribute AAC). Additionally, the buffer can be main-
tained in a FIFO manner to limit its size to a well
defined maximum. This kind of strategy is also pro-
posed in (Bittl et al., 2015a) for PSCs and has been
shown to perform well.
5 EVALUATION
In order to evaluate the impact of different AAC
distribution mechanisms a simulation environment is
used. Its details as well as the used traffic patterns are
described in Section 5.1. Afterwards, the obtained re-
sults are discussed in Section 5.2.
5.1 Simulation Environment
The used simulation environment uses a combination
of two dedicated simulators, which are SUMO for
microscopic traffic simulation (Behrisch et al., 2011)
and ns-3 for wireless network simulation (Riley and
Henderson, 2010). Within ns-3 the ezCar2X frame-
work is used to provide standard compatible ETSI ITS
protocol functionality. An in detail description of the
simulator can be found in (Roscher et al., 2014).
Furthermore, the simulations use the concept of so
called core zones (102, 2012b; Kloiber et al., 2010).
Thereby, the considered traffic area is a subset of the
full simulated road network to avoid edge effects.
The used traffic scenario for all simulation is the
well known freeway model. Thereby, three lanes are
used for each direction, i.e., there are six lanes in total.
Parametrization of traffic shape is done as suggested
in (102, 2012b). Due to quite high vehicle speed, all
ITS-Ss use 10 Hz CAM generation rate (302, 2014).
Channel simulation uses a two ray ground model
with parameters from the freeway channel model de-
rived by real measurements in (Cheng et al., 2007).
5.2 Evaluation Results
Evaluation results obtained by using the framework
from Section 5.1 are given in the following. Thereby,
the impact of the DOS attack from Section 3.2 is dis-
cussed first. Secondly, the impact on system perfor-
mance without presence of an attacker is described.
5.2.1 DOS Attack
As mentioned in Section 3.2, the amount of requested
AACs per CAM of the attacker is limited by the max-
imum length of the certificate request vector in the se-
curity envelope. Currently, the maximum length is six
elements (103, 2015). Thus, in order to calculate the
average amount of targetable vehicles in Germany we
determine the market share of the six highest volume
OEMs. This is done by using statistical data available
from reference (Kraftfahrt-Bundesamt, 2014).
Thereby, we find that the accumulated market
share of highest volume OEMs (VW, Mercedes, Audi,
BMW, Opel, Ford) is 61.06%. Thus, on average an
attacker can assume to successfully cause 61.06% of
all vehicles within his communication range to signif-
icantly increase their channel usage.
The attack increases the average message size of
CAMs by a factor of i over the ordinary CAM size
(without presence of an attacker). Regarding cyclic
inclusion of PSCs into CAMs an upper bound on the
achievable increase can be calculated by
i ≤
s
CAM,PSC+AAC
s
CAM
. (2)
Thereby, the size of a CAM with certificate chain is
given by s
CAM,PSC+AAC
(= 404 bytes) and the one of
an average CAM by s
CAM
.
An upper bound on i can be obtained as follows.
s
CAM
is 108.5 bytes for 10 Hz CAM emission fre-
quency and minimal 1 Hz PSC inclusion frequency.
Thus, i = 3.72 is the upper bound on achievable in-
crease in average message size. The bound is to be
matched in case no implicit or explicit PSC requests
happen in the VANET, which makes PSC inclusion
happen more frequently. This increases average CAM
size s
CAM
. Thus, i is smaller than the given bound. To
ICISSP 2016 - 2nd International Conference on Information Systems Security and Privacy
92

obtain the given values corresponding standards (103,
2015; 302, 2014) have been used.
The amount of PSC requests greatly depends on
the traffic scenario, as such requests happen when the
surrounding of ITS-Ss change. Thus, the achievable
value of i depends on the traffic scenario, too.
The increase in average CAM size can be expected
to cause an increase in channel load. Clearly, the
channel load cannot supersede the maximum channel
load determined by the maximum channel capacity.
Thus, in case of an already high channel load the at-
tack will cause the channel to saturate leading to sig-
nificant system performance degradation. Thereby,
mainly two effects can be seen, which are
1. reduced CAM generation rate on the facility
layer enforced by decentralized congestion con-
trol (DCC), and
2. forced reduction of message emission frequency
by denied channel access due to the used CSMA-
CA mode on the access layer.
Both mechanisms reduce cooperative awareness
among ITS-S by reduced update frequency of infor-
mation about other ITS-Ss within their surrounding.
Thus, data quality available for ADAS will decrease.
To simulate the attacker, we position an RSU in
the center of our simulated area. It always sends out
messages without PSC containing six AAC requests
for the most commonly used AACs of ITS-S within
its surrounding. Moreover, the attacker ignores DCC
rules to send out his requests frequently even in case
of already high channel load.
Table 1 gives achievable sizes of i within commu-
nication distance of the attacker. The vehicle inter-
val for the displayed measurement results is three ve-
hicles per second. This yields s
CAM
= 134.3 bytes,
due to an average of 3.064 PSC emissions per sec-
ond. Additionally, for the first experiment all ITS-S
were equipped with only six different AACs (column
“worst”). For the second case, AACs were distributed
according to OEM sales figures from (Kraftfahrt-
Bundesamt, 2014). The attacker always requests the
six most common AACs at once.
Table 1: Message size increase from DOS attack.
worst six most common AAC req.
bound 3.72 2.66
measured 3.01 2.23
The average communication distance in the used
traffic scenario is about 300m. Thus, the increase in
message size caused by the attack works up to a dis-
tance of 300m to the position of the attacker. More-
over, results from Table 1 show that the practically
achievable increases are significantly lower than their
corresponding bounds. This is caused by the fact that,
in the reference scenario (without attacker) already a
significant amount of PSC inclusions take place.
Channel busy ratio (CBR) is an important metric
for channel load. Measured values for CBR in depen-
dence on the distance from the attacker are given in
Figure 3. Two displayed scenarios use the worst case
in which all receivers include their certificate chain in
their next transmitted CAM. Additionally, the corre-
sponding scenarios, in which all ITS-Ss using the six
most common AACs respond, are given. Vehicle den-
sity is varied by using two different intervals between
vehicle insertion into the simulation (9s and 2s).
0
10
20
30
40
50
60
70
80
0 50 100 150 200 250 300 350 400 450 500 550 600 650
channel busy ratio
distance from attacker [m]
AAC att. worstcase, vehicle interval 2s
AAC att worstcase., vehicle interval 9s
AAC att. 6 most common, vehicle interval 2s
AAC att. 6 most common, vehicle interval 9s
PSC att., vehicle interval 2s
PSC att., vehicle interval 9s
Figure 3: CBR in dependence of distance from attacker.
As a reference scenario, the pure attack on PSC
distribution from (Bittl et al., 2015a), which is always
part of the attack on AAC distribution as outlined in
Section 3.2, is given in Figure 3. It serves as a lower
bound for the channel busy ratio increase. CBR with-
out an attacker is constant and equal to the one given
for a distance of 650m to the attacker.
One can see from Figure 3 that the increase in
channel load drops to zero at about 600m (= 2·300m)
distance to the attacker, i.e., double of the attacker’s
communication distance. The channel busy ratios for
the DOS attack are higher than the ones for peak chan-
nel busy ratios on case of normal AAC requests (see
Figure 4), due to the extra PSC distribution attack.
From comparison of the results from Table 1 and
Figure 3, one can see that the channel load does not
increase as much as the messages size does. This
is due to saturation effects of the wireless channel,
caused by the used CSMA-CA mechanism. Thus,
ITS-Ss are (temporarily) denied from accessing the
channel while the attack is present. Hence, the at-
tacker can reduce frequency of message exchange and
thereby decrease data quality (e.g., lower update rate)
available for VANET applications.
Evaluation of countermeasures (AAC distribution
according to Section 4) shows that they can all effi-
ciently avoid the DOS attack. For all strategies, the
increase in average message size and channel load is
hardly noticeable even in case of frequently repeated
AAC requests. The maximum observed amount of
Efficient Authorization Authority Certificate Distribution in VANETs
93
responders for CBR was just two. For the other AAC
delivery schemes only one node sent its AAC as ex-
pected. Thus, the massive amount of certificate chain
emissions happening for the standardized approach
can clearly be avoided by the proposed schemes.
The obtained results show clearly, that the DOS at-
tack from Section 3.2 can be carried out and severely
affects the usability of VANETs. Moreover, pro-
posed strategies for more efficient AAC distribution
can overcome this weakness.
5.2.2 Normal Traffic Scenario
In order to evaluate the impact on channel load we use
two different metrics. The first one is the increase in
average message size (see Equation 2) and the second
one is the time span the increase persists.
The length of the period in which AAC responses
from other ITS-S are sent depends on their current
CAM generation rate. In case all ITS-S use a com-
mon generation rate of 10 Hz, the period should be
about 100ms. Some transmissions will probably oc-
cur with a small extra delay, due to delays in internal
processing within ITS-Ss and from channel access.
Four different cases have been studied in detail for
AAC requests in respect to channel load. Thereby, the
requester requests
1. one AAC and all other ITS-Ss answer the request
(worst case),
2. the maximum of six different AACs being an-
swered on average by 61.06 % of receivers,
3. one AAC which is equal to the most common on
and thus the request is answered on average by
21.31 % of receiving ITS-Ss, and
4. one randomly picked AAC, which is answered on
average by 8.6 % of receiving ITS-Ss (most right
column in Table 2).
Thereby, the numbers were obtained from figures in
(Kraftfahrt-Bundesamt, 2014).
Table 2 gives theoretical bounds as well as simula-
tion results for both values at the location of the ITS-S
sending the AAC request. The requesting ITS-S is in-
serted as an RSU into the simulation at its center after
the remaining traffic flow has been already build up.
Unfortunately, no reference scenarios have been sug-
gested in prior work to simulate AAC requests.
Table 2: Message size increase after AAC request.
worst 6 AAC 1 AAC 1 ACC a
bound 3.72 2.66 1.58 1.23
measured 3.01 2.23 1.43 1.17
The results in the first two columns of Table 2 are
identical to those from Table 1. Requests for single
AACs can be expected to be the most common case
in practice. Corresponding values in Table 2 show
that average message size increase is significant.
The average channel load, during the time respon-
ders send their certificate chains, is given in Figure
4.
0
10
20
30
40
50
60
70
80
233.544.556789
average channel busy ratio in %
vehicle interval [s]
worst
six most common
single most common
average
without
Figure 4: Channel busy ratios for different traffic densities
after an AAC request at the position of the requester.
As can be expected, Figure 4 shows that the chan-
nel busy ratio increases alongside with increasing
traffic density (i.e., decreasing vehicle interval). Ad-
ditionally, an increase in the number of responders
clearly increases the channel busy ratio. This shows
that one can limit the channel busy ratio increase after
an AAC request by limiting the number of responders,
as done by the methods discussed in Sections 4.2 and
4.3.
The amount of channel busy ratio increase de-
creases with higher distances to the vehicle which
sends the AAC request. Thereby, the distribution is
like given in Figure 3. However, the increase last only
for limited time, in contrast to the DOS scenario in
Section 5.2.1 for which the increase is permanent.
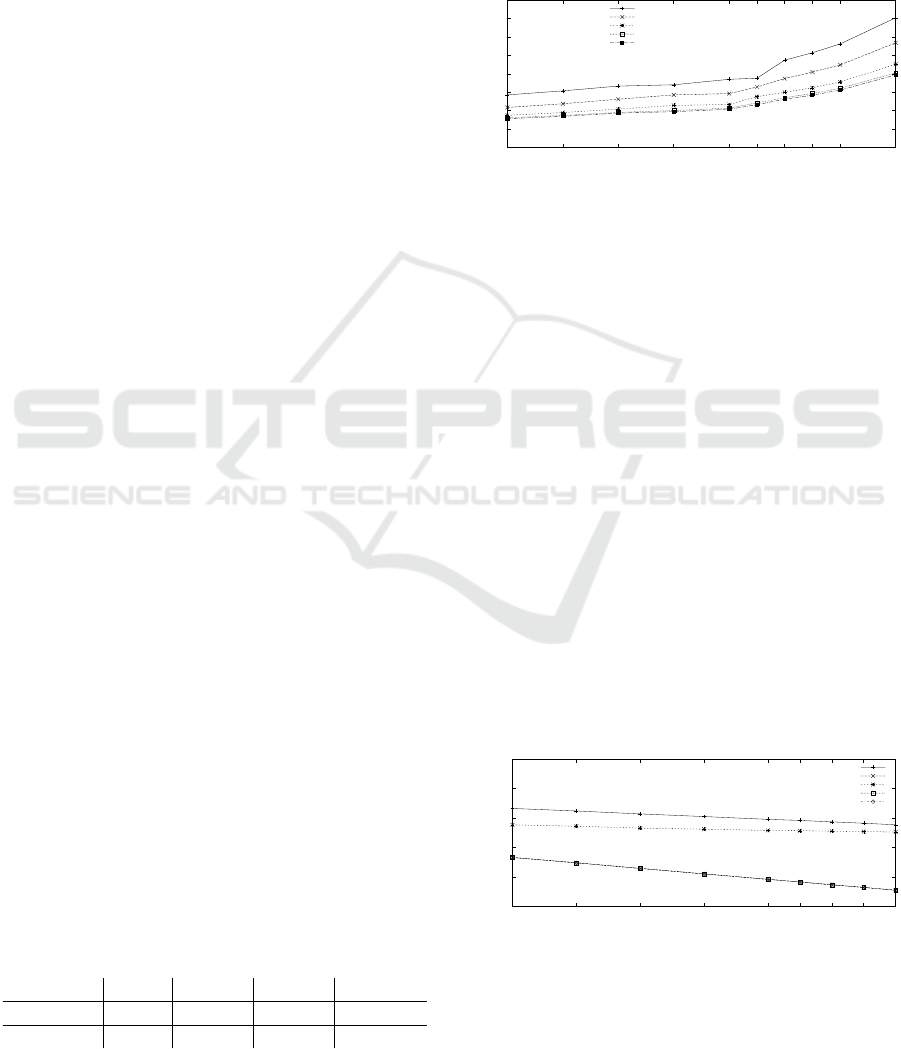
Response times of the different efficient response
mechanisms from Sections 4.2 and 4.3 are given in
Figure 5. Moreover, performance of the standard-
ized approach from (103, 2015) is illustrated. Both
purely time based schemes limit responder selection
to ITS-Ss within 300m distance to the requester.
0
20
40
60
80
100
33.544.556789
average response time
vehicle interval [s]
greedy pos.
greedy time
CBR
CBR timeout
standardized
Figure 5: Response times for AAC requests (most common
single AAC) for different traffic densities.
As one can see from Figure 5, the time based re-
sponse mechanisms outperform their position based
ICISSP 2016 - 2nd International Conference on Information Systems Security and Privacy
94

counterparts. Furthermore, both schemes reach per-
formance of the standardized approach. Moreover,
the purely position based greedy responding schemes
performs worst. The CBR scheme using time and po-
sition information cannot reach the performance of
purely time based schemes. In detail analysis shows
that many responses are delayed due to the location
dependent timeout leading to a significant delay of an
actually carried out AAC transmission. Furthermore,
CAMs of the ITS-Ss which skipped transmitting the
AAC are disregarded by the requester, as they cannot
be verified due to the missing AAC.
In contrast to the position-based routing problem,
no serious drawback of the requester based selection
scheme in comparison to responder based selection
was obtained. This is caused by the contrasting goals
of cooperation between routing and AAC distribution.
For AAC distribution the target of the caused reaction
from the addressed responder(s) is the sender itself. In
contrast, for packet forwarding the target is a distant
node out of direct communication range of the sender.
Moreover, forwarding can trigger message sending on
its own, while AAC dissemination relies on piggy-
backing to higher level messages, e.g., CAMs.
Additionally, the time based response mecha-
nisms yield minimal cryptographic packet loss. In the
ideal case, no other ITS-S using the same AAC un-
known to the requester transmits before the one dis-
tributing the AAC. Thus, the requester does not have
to disregard further messages due to missing AACs.
Our evaluation shows that both proposed response
time based AAC distribution schemes perform well.
However, only the requester based selection scheme
allows to avoid the transmission of entire certificate
chains in one message completely. As this property
can be very beneficial for the design of VANET pro-
tocols, the scheme from Section 4.2.2 should be used
for AAC distribution in future VANETs.
6 CONCLUSIONS AND FUTURE
WORK
Future VANETs require efficient security mecha-
nisms to enable their usage in safety critical advanced
driver assistance systems. We show that, apart from
the distribution of pseudonym certificates, which has
been well studied in prior work, also the distribution
of authorization authority certificates (AACs) can sig-
nificantly influence system performance.
The supplied analysis and evaluation of the cur-
rent standard from ETSI ITS (103, 2015) shows that
the straight forward approach taken there can lead to
significant performance issues. Moreover, it allows an
attacker to perform a serious denial of service (DOS)
attack on VANETs, whose impact range exceeds the
transmission distance of the attacker. Multiple ap-
proaches to minimize the number of required AAC
emissions are discussed.
In general the frequency of AAC requests can be
greatly limited by long term buffering of received
AACs. Thereby, repeated distribution can be avoided.
Additionally, requester or responder based responder
selection schemes for AAC distribution can signif-
icantly reduce the number of AAC emissions after
an AAC request. Thereby, the DOS attack can be
avoided by design. Moreover, buffering of PSCs lead-
ing to an AAC request together with greedy respond-
ing completely removes the need for distribution of
certificate chains. Thereby, the worst case size of the
security envelope, and thus the security overhead, can
be reduced by more then one third.
Thus, the proposed greedy response scheme,
based on predicted message transmission time of pos-
sible responders, can be regarded as a promising ap-
proach for usage in future VANET systems.
Future work can study the influence of different
traffic conditions on the performance of the suggested
AAC distribution mechanisms. Thereby, the influence
of variable rate CAM emission on prediction of re-
sponse times at the requester can be studied in low
and medium velocity traffic scenarios.
REFERENCES
(2011). Intelligent Transport Systems (ITS); Decentralized
Congestion Control Mechanisms for Intelligent Trans-
port Systems operating in the 5 GHz range; Access
layer Part. V1.1.1.
(2011). Memorandum of Understanding for OEMs within
the CAR 2 CAR Communication Consortium on De-
ployment Strategy for cooperative ITS in Europe. V
4.0102.
(2012a). Intelligent Transport Systems (ITS); Security;
ITS communications security architecture and secu-
rity management. V1.1.1.
(2012b). Intelligent Transport Systems (ITS); STDMA rec-
ommended parameters and settings for cooperative
ITS; Access Layer Part. V1.1.1.
(2013). IEEE Standard for Wireless Access in Vehicular
Environments - Security Services for Applications and
Management Messages. 1609.2-2013.
(2013). Intelligent Transport Systems (ITS); Security; Se-
curity header and certificate formats. V1.1.1.
(2014). Intelligent Transport Systems (ITS); Vehicular
Communications; Basic Set of Applications; Part 2:
Specification of Cooperative Awareness Basic Ser-
vice. V1.3.2.
Efficient Authorization Authority Certificate Distribution in VANETs
95

(2015). Intelligent Transport Systems (ITS); Security; Se-
curity header and certificate formats. V1.2.1.
Behrisch, M., Bieker, L., Erdmann, J., and Krajzewicz, D.
(2011). SUMO - Simulation of Urban MObility: An
Overview. In The Third International Conference on
Advances in System Simulation, pages 63–68.
Bittl, S., Aydinli, B., and Roscher, K. (2015a). Effec-
tive Certificate Distribution in ETSI ITS VANETs
using Implicit and Explicit Requests. In M.
Kassab et al., editor, 8th International Workshop
Nets4Cars/Nets4Trains/Nets4Aircraft, LNCS 9066,
pages 72–83.
Bittl, S., Gonzalez, A. A., Sp
¨
ahn, M., and Heidrich, W.
(2015b). Performance Comparison of Data Serial-
ization Schemes for ETSI ITS Car-to-X Communica-
tion Systems. International Journal On Advances in
Telecommunications, 8:48 – 58.
Blum, B., He, T., and Son, S. (2003). IGF: A State-Free
Robust Communication Protocol for Wireless Sensor
Networks. Technical Report CS-2003-11, Department
of Computer Science, University of Virginia.
Boban, M. (2012). Realistic and Efficient Channel Mod-
eling for Vehicular Networks. Phd thesis, Dept. of
Electrical and Computer Engineering, Carnegie Mel-
lon University.
Cheng, L., Henty, B. E., Stancil, D. D., Bai, F., and Mu-
dalige, P. (2007). Mobile Vehicle-to-Vehicle Narrow-
Band Channel Measurement and Characterization of
the 5.9 GHz Dedicated Short Range Communication
(DSRC) Frquency Band. IEEE Journal on Selected
Areas in Communications, 25(8):1501–1516.
Feiri, M., Petit, J., and Kargl, F. (2012). Evaluation of
Congestion-based Certificate Omission in VANETs.
In IEEE Vehicular Networking Conference, pages 101
– 108.
F
¨
ußler, H., Hartenstein, H., Martin, M., Effelsberg, W., and
Widmer, J. (2004). Contention-Based Forwarding for
Street Scenarios. In 1st International Workshop in In-
telligent Transportation, pages 155–160.
F
¨
ußler, H., Widmer, J., K
¨
asemann, M., Mauve, M., and
Hartenstein, H. (2003). Contention-Based Forward-
ing for Mobile Ad Hoc Networks. Elsevier’s Ad Hoc
Networks, 1(4):351–369.
J. Harding et al. (2014). Vehicle-to-Vehicle Communica-
tions: Readiness of V2V Technology for Application.
Technical Report DOT HS 812 014, Washington, DC:
National Highway Traffic Safety Administration.
Heissenb
¨
uttel, M., Braun, T., Bernoulli, T., and W
¨
alchli,
M. (2004). BLR: Beacon-Less Routing Algorithm for
Mobile Ad-Hoc Networks. Elsevier’s Computer Com-
munications Journal (Special Issue), 27(11):1076–
1086.
Kargl, F., Schoch, E., Wiedersheim, B., and Leinm
¨
uller, T.
(2008). Secure and Efficient Beaconing for Vehicular
Networks. In Fifth ACM international workshop on
VehiculAr Inter-NETworking, pages 82–83.
Kloiber, B., Strang, T., de Ponte-Mueller, F., Rico Garcia,
C., and Roeckl, M. (2010). An Approach for Perfor-
mance Analysis of ETSI ITS-G5A MAC for Safety
Applications. In The 10th International Conference
on Intelligent Transport Systems Telecommunications.
Kraftfahrt-Bundesamt (2014). Neuzulassungen von
Personenkraftwagen im August 2014 nach
Marken und Modellreihen. online. available
http://www.kba.de/DE/Statistik/Fahrzeuge/Neuzulas
sungen/MonatlicheNeuzulassungen/monatl neuzulas
sungen node.html.
Masdari, M. and Barbin, J. P. (2012). Distributed Certifi-
cate Management in Mobile Ad Hoc Networks. In-
ternational Journal of Applied Information Systems,
1(1):33–40.
Morogan, M. S. and Muftic, S. (2003). Certificate Manage-
ment in ad hoc Networks. In Symposium on Applica-
tions and the Internet Workshops, pages 337–341.
Riley, G. F. and Henderson, T. R. (2010). The ns-3 Network
Simulator. In Wehrle, K., G
¨
unes, M., and Gross, J.,
editors, Modeling and Tools for Network Simulation,
pages 15–34. Springer Berlin Heidelberg.
Roscher, K., Bittl, S., Gonzalez, A. A., Myrtus, M., and
Jiru, J. (2014). ezCar2X: Rapid-Prototyping of Com-
munication Technologies and Cooperative ITS Appli-
cations on Real Targets and Inside Simulation Envi-
ronments. In 11th Wireless Communication and In-
formation, pages 51 – 62.
Sen, J., Chandra, M. G., Balamuradlidhar, P., and Harihara,
S. G. (2007). A Scheme of Certificate Authority for
Ad Hoc Networks. In 18th International Workshop
on Database and Expert Systems Applications, pages
615–619.
Sommer, C. and Dressler, F. (2015). Vehiclular Networking.
Cambridge University Press.
Task Force PKI, WG Security C2C-CC (2012). C2C-CC
PKI Memo. Technical Report 1.7, Car2Car Commu-
nication Consortium.
ICISSP 2016 - 2nd International Conference on Information Systems Security and Privacy
96
