
k-fold Subsampling based Sequential Backward Feature Elimination
Jeonghwan Park, Kang Li and Huiyu Zhou
School of Electronics, Electrical Engineering and Computer Science, Queen’s University Belfast, Belfast, U.K.
Keywords:
Feature Selection, Appearance Model, Human Detection.
Abstract:
We present a new wrapper feature selection algorithm for human detection. This algorithm is a hybrid feature
selection approach combining the benefits of filter and wrapper methods. It allows the selection of an optimal
feature vector that well represents the shapes of the subjects in the images. In detail, the proposed feature
selection algorithm adopts the k-fold subsampling and sequential backward elimination approach, while the
standard linear support vector machine (SVM) is used as the classifier for human detection. We apply the
proposed algorithm to the publicly accessible INRIA and ETH pedestrian full image datasets with the PASCAL
VOC evaluation criteria. Compared to other state of the arts algorithms, our feature selection based approach
can improve the detection speed of the SVM classifier by over 50% with up to 2% better detection accuracy.
Our algorithm also outperforms the equivalent systems introduced in the deformable part model approach with
around 9% improvement in the detection accuracy.
1 INTRODUCTION
A feature is an individual measurable property of a
process being observed. Using a set of features, a ma-
chine learning algorithm can perform necessary clas-
sification (Chandrashekar and Sahinn, 2014). Com-
pared to the situation back to the early years in the pat-
tern recognition community, the space of features to
be handled has been significantly expanded. High di-
mensionality of a feature vector is known to decrease
the machine learning performance (Guyon and Elis-
seeff, 2003), and directly affects applications such as
human detection systems whose system performance
relies heavily on both the classification speed and ac-
curacy. A feature with no association with a class is
regarded as a redundant or irrelevant feature. A re-
dundant feature represents a feature which does not
contribute much or at all to the classification task. An
irrelevant feature can be defined as a feature which
may only lead to decreased classification accuracy
and speed. Blum (Blum, 1997) defined the relevant
feature f as a feature which is useful to a machine
learning algorithm L with respect to a subset of fea-
tures {S}: the accuracy of an hypothesized algorithm
using the feature set {f ∪S} is higher than that only
using {S}. In pattern recognition, the aim of fea-
ture selection is to select relevant features (an opti-
mal subset), which can maximise the classification
accuracy, from the full feature space. When a fea-
ture selection process is applied to pattern recogni-
tion, it can be seen as an embedded automated pro-
cess which removes redundant or irrelevant features,
and selects a meaningful subset of features. Feature
selection offers many benefits in understanding data,
reducing computational cost, reducing data dimen-
sionality and improving the classifier’s performance
(Chandrashekar and Sahinn, 2014). In general, fea-
ture selection is distinguished from vector dimension-
ality reduction techniques such as Principal Compo-
nent Analysis (PCA) (Alpaydin, 2004), as feature se-
lection merely selects an optimal subset of features
without altering the original information. Feature se-
lection requires a scoring mechanism to evaluate the
relevancy of features to individual classes. The scor-
ing mechanism is also named the feature selection cri-
terion, which must be followed by an optimal subset
selection procedure. Naively evaluating all the sub-
sets of features (2
N
) becomes an NP-hard problem
(Amaldi and Kann, 1998) as the number of features
grows, and this search becomes quickly computation-
ally intractable. To overcome this computation prob-
lem, a wide range of search strategies have been intro-
duced, including best-first, branch-and-bound, simu-
lated annealing and genetic algorithms (Kohavi and
John, 1997)(Guyon and Elisseeff, 2003), etc. In terms
of feature scoring, feature selection methods have
been broadly categorised into filter and wrapper meth-
ods (Kohavi and John, 1997). Filter methods allow
one to rank features using a proxy measure such as
the distance between features and a class, and select
Park, J., Li, K. and Zhou, H.
k-fold Subsampling based Sequential Backward Feature Elimination.
DOI: 10.5220/0005688804230430
In Proceedings of the 5th International Conference on Pattern Recognition Applications and Methods (ICPRAM 2016), pages 423-430
ISBN: 978-989-758-173-1
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
423

Figure 1: Proposed Feature Selection System Overview.
the most highly ranked features to be a candidate fea-
ture set. Wrapper methods score features using the
power of a predictive model to select an optimal sub-
set of features.
In this paper, we propose a hybrid feature selec-
tion approach which combines the benefits of filter
and wrapper methods, and discuss the performance
improvement of the human detection system achieved
using the proposed algorithm. We also demonstrate
how optimal features selected by the proposed algo-
rithm can be used to train an appearance model. The
rest of the report is organised as follows. In section
2, feature selection methods and their core techniques
are briefly reviewed. Section 3 introduces the pro-
posed feature selection algorithm. The experiment
results of the pedestrian detection system using the
proposed algorithm is described in Section 4. Finally,
Section 5 concludes the paper.
2 RELATED WORK
One way for feature selection is simply evaluat-
ing features based on their information content, us-
ing measures like interclass distance, statistical de-
pendence or information-theoretic measures (Estevez
et al., 2009). The evaluation is independently per-
formed against different features, and the evaluation
result called “feature rank” is directly used to de-
fine the usefulness of each feature for classification.
Entropy and Mutual information are popular rank-
ing methods to evaluate the relevancy of features
(Foithong et al., 2012)(Peng et al., 2005)(Javed et al.,
2012)(Estevez et al., 2009). Zhou et al. (Zhou et al.,
2011) used the R ´enyi entropy for feature relevance
evaluation of overall inputs in their automatic scaling
SVM. Battiti proposed the MIFS algorithm (Battiti,
1994), which selects the most relevant k feature ele-
ments from an initial set of n feature dimensions, us-
ing a greedy selection method. Many MIFS variations
have been introduced since then such as the mRMR
(Peng et al., 2005), which used the first-order incre-
mental search mechanism to select the most relevant
feature element at a time. Estevez et al. (Estevez et al.,
2009) replaced the mutual information calculation in
the MIFS by the minimum entropy of two features.
Wrapper methods utilise classifier’s performance
to evaluate feature subsets. Wrapper methods have a
significant advantage over filter methods as the clas-
sifier (learning machine) used for evaluation is con-
sidered as a black box. This flexible framework was
proposed in (Kohavi and John, 1997). Gutlein et al.
(Gutlein et al., 2009) proposed to shortlist k ranked
feature elements firstly, and then applied a wrapper
sequential forward search over the features. Ruiz et al.
(Ruiz et al., 2006) proposed an incremental wrapper-
based subset selection algorithm (IWSS), which iden-
tified the optimal feature area before the exhaustive
search was applied. Bermejo et al. (Bermejo et al.,
2011) improved the IWSS by introducing a feature re-
placement approach. Foithong et al. (Foithong et al.,
2012) used the CMI algorithm to guide the search
of an optimal feature space, and applied the VPRMS
as an intermediate stage before the wrapper method
started. Pohjalainen et al. (Pohjalainen et al., 2013)
proposed the RSFS which used the dummy feature
relevance score as a selection criterion. Li and Peng
(Li and Peng, 2007) introduced a fast model-based
approach to select a set of significant inputs to a non-
linear system. Heng et al. (Heng et al., 2012) ad-
dressed the overfitting problem of the wrapper meth-
ods by proposing a shrink boost method. Yang et al.
(Yang et al., 2012) proposed a wrapper method with
the LRGA algorithm to learn a Laplacian matrix for
the subset evaluation.
3 PROPOSED ALGORITHM
In this section, a novel feature selection algorithm is
presented. The proposed feature selection algorithm
is a wrapper method which adopts the k-fold subsam-
pling method in the validation step. The search strat-
egy is an exhaustive search, namely the sequential
backward elimination (SBE, Marill and Green 1963).
The proposed algorithm is a classifier dependent fea-
ture selection method, and the linear SVM is used as
the classifier to evaluate the selected feature subsets.
3.1 Frame Work
First, the entire feature set {F} is randomly divided
into j small subsets where an evaluation process is
performed, S
n
∈ F, f or n = 1,2,.., j. Square root
calculation on the size of the full feature set {F} is
used to determine the size of a subset. When the local
stopping criterion L
c
is satisfied, another relevance
score I contributes to the computation of feature
relevance scores, and considerably a large number of
ICPRAM 2016 - International Conference on Pattern Recognition Applications and Methods
424

Figure 2: Performance illustration: (a) Step performance curve of the proposed feature selection algorithm. (b) Human
Detection performance using different HOG detectors trained with different feature subsets. The evaluation was carried out
on the first 100 INRIA Full Images. The computed miss rates between 0.01 and 1 false positives per-image (FPPI) are shown
in the legend. HOG Detectors trained with optimal feature subsets perform better than or similar to 100HOG showing a small
overfitting problem.
irrelevant/redundant feature elements (from the least
significant one, LSFs) are subtracted. The process
continues on until the global stopping criterion is
satisfied. The whole process is sketched in Fig 1.
Random Subsets: When the remaining feature
set {F
l
} is reset, a temporary ID is given to individual
vector elements for backtracking which gives them an
equal opportunity in the evaluation. The temporary
ID is only valid within one step. A step refers to
the point where the local stopping criterion L
c
is
satisfied, LSFs are subtracted and all the iteration
parameters are re-initialised. An iteration refers to
that the evaluation has completed over all the subsets,
and each vector element has been evaluated once.
At the beginning of each iteration within one step,
the feature vector elements of the remaining feature
set {F
l
} is randomly re-arranged and divided into
subsets, n ×{S}. The size of a subset is chosen as
√
N where N is the number of the remaining features.
Relevance Score: The algorithm uses two scores,
step performance score P and feature relevance score
R. During each iteration in the exhaustive search
stage, the relevance score of individual features is up-
dated according to the prediction power score over the
subset where the feature participates. In this paper,
the Unweighted Average Recall (UAR) is used to cal-
culate the prediction power score over the subsets:
P{S
n
} =
1
N
N
∑
i=1
C
iP
C
iP
+C
iF
(1)
where S
n
is nth subset, i is the class index, C
iP
is the
class true positive (correct prediction) and C
iF
is the
class false negative (wrong prediction).
The individual feature relevance score is then up-
dated as (Pohjalainen et al., 2013):
R
f
= R
f
+ P{S
n
}−E, f ∈ S
n
,
(2)
where E is the UAR of the cumulated C
P
and C
F
over
a step. As the search continues, the feature score R
f
represents how much the corresponding feature has
contributed to the prediction.
Stopping Criterion: The local stopping criterion
L
c
is calculated using the standard deviation of the
step’s performance with a specific predictor. L
c
is de-
fined as:
L
c
=
v
u
u
t
1
N
N
∑
i=1
P
i
−
1
N
N
∑
j=1
P
j
2
(3)
where P
i
is the step performance score. L
c
is then
compared with a supervised parameter (0.6 in this
study) to decide the evaluation fairness over all
the features. The global stopping criterion G
c
is a
supervised parameter, and the number of features to
be finally selected is used here.
Counter Score: Even though an algorithm has
performed a large number of iterations and the lo-
cal stopping criterion L
c
has been satisfied, it can
not always be guaranteed that the chosen LSFs are
truly irrelevant/redundant features, especially in a
large feature space. To overcome this problem, the
proposed algorithm uses information ranks, named
counter score, in the LSFs selection to update each
feature’s relevance score. In this paper, the mutual
information is chosen to compute the counter score.
Mutual information was originally introduced in in-
formation theory. It is used for empirical estimates
k-fold Subsampling based Sequential Backward Feature Elimination
425
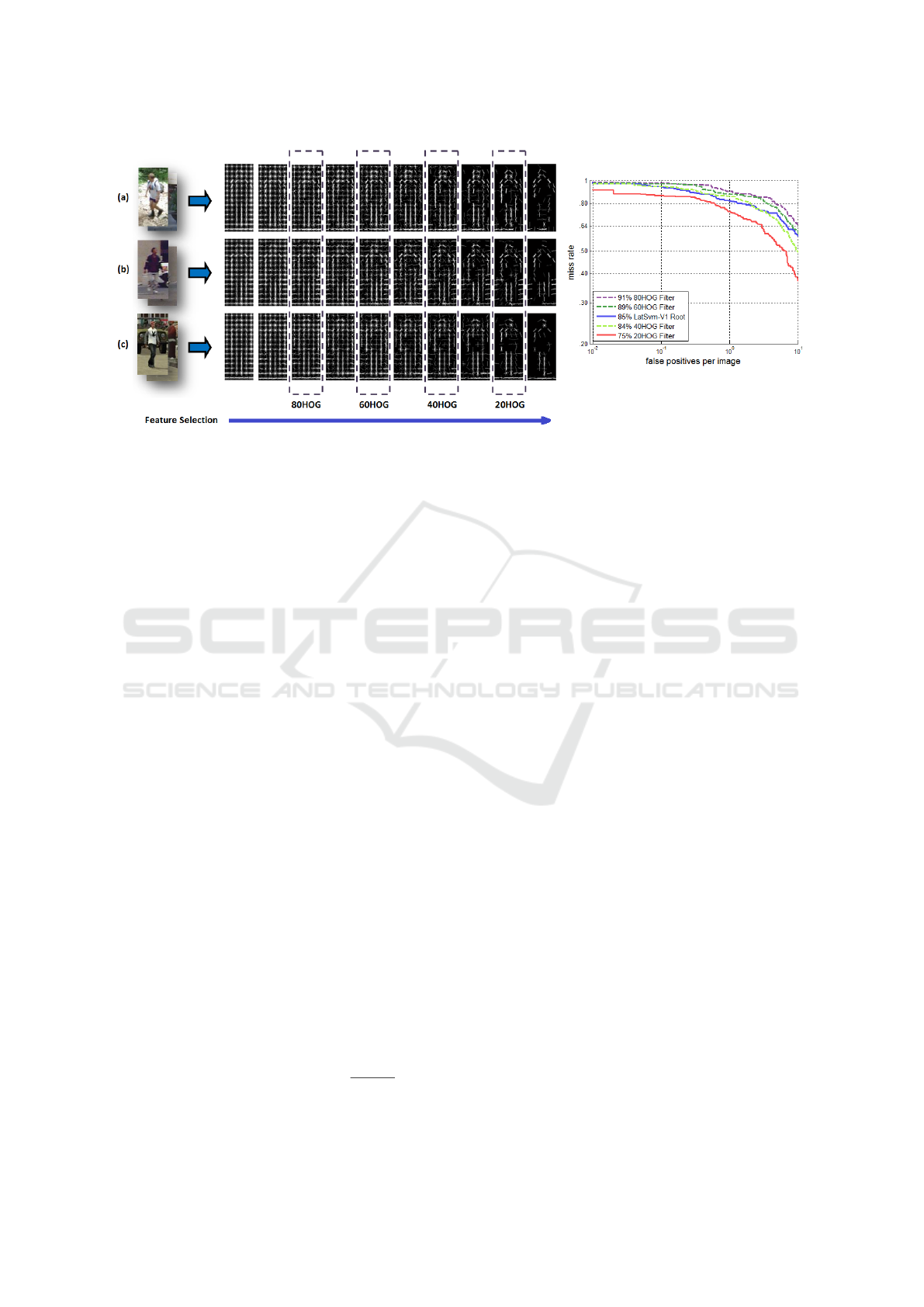
Figure 3: Appearance models trained using the proposed feature selection algorithm. (a) INRIA Dataset, (b) MIT Dataset
and (c) CVC04 Dataset (Vazquez et al., 2014). The detection performances of the INRIA appearance models are evaluated
on the first 100 INRIA full images. The appearance model from 20HOG shows 10% better performance than the root filter of
LatSVM-V1 (Felzenszwalb et al., 2008).
between individual features and classes (Guyon and
Elisseeff, 2003). Mutual information is derived from
entropy. Entropy H is an uncertainty measure of event
occurrence. Entropy of the discrete random vari-
able X is described as H(X) = −
∑
x∈X
p(x)log p(x),
where p(x) denotes the probability density of an event
x ∈ X. The entropy of variable X can be condi-
tioned on variable Y as H(X|Y ). If variable Y does
not introduce any information which influences the
uncertainty of X, in other word, X and Y are statis-
tically independent, the conditional entropy is max-
imised (Vergara and Esteves, 2014). From this de-
scription, mutual information IG(X ;Y ) can be derived
as H(X) −H(X|Y ). Mutual information represents
the amount of information mutually shared between
variable X and Y . This definition is useful within
the context of feature selection because it gives a way
to quantify the relevance of a feature with respect to
the class (Vergara and Esteves, 2014). Therefore, us-
ing mutual information in the wrapper approach ben-
efits both the optimal feature space search and the se-
lection performance enhancement. The proposed al-
gorithm uses the mutual information to compute the
counter score of each feature. The counter score I
f
and its contribution to the feature relevance score are
calculated as follows:
R
f
= R
f
+ αI
f
, I
f
= IG
f
/IG
Max
(4)
where α = (R
Max
×FN
Remain
)/FN
Full
is the counter
score contribution rate, IG
f
is the mutual information
of feature elements. The rate is dynamically decre-
mented as more steps are processed
FN
Remain
FN
Full
, which
means the counter score contributes more in the large
LSFs subtraction. Fig.2 (a) shows that the counter
score improves the performance of the proposed
wrapper feature selection algorithm in terms of local
prediction accuracy.
Feature Subtraction: The number of features to
be removed at each step is chosen as (5/N) ×100,
where N is the number of the remaining features. In
comparison to the original SBE algorithm, which re-
moves only the least significant feature at a time, it
is reasonable to remove more than one feature at a
time, as only a small portion of features are highly
relevant in many applications. In a human detection
system, the most relevant features can be viewed as
the features which are centred on the human contour.
This can be visually demonstrated in Fig.3. When a
step is completed (L
c
has been satisfied), the algo-
rithm subtracts a group of the least significant fea-
tures, m ×LSFs, which have the lowest relevance
score R
f
.
3.2 Appearance Model
In a human detection system, the optimal feature el-
ements tend to represent the human contour as illus-
trated in Fig.3. This was also pointed out in (Dalal
and Triggs, 2006) as the most important cells are the
ones that typically contain major human contours. In
other words, the optimal feature elements are useful
to build an appearance model. To evaluate the dis-
criminative power of the selected feature elements, a
simple appearance model is created. The model con-
sists of a positive filter and a negative filter. The pos-
itive filter is formed with the average HOG of the se-
lected feature elements from the positive examples.
ICPRAM 2016 - International Conference on Pattern Recognition Applications and Methods
426

Figure 4: Filter Score Computation: The positive filter score is subtracted from the negative filter score.
The negative filter is generated with the negative ex-
amples in the same manner. The HOG scheme allows
us to divide the appearance of an object into geomet-
rical units called cells. A cell is then represented with
n angles and their weighted magnitudes. The HOG
feature of an example is an one-dimensional array of
magnitudes whose indexes indicate the angle and the
location of the cell. The proposed feature selection
algorithm outputs the array indexes of an optimal fea-
ture subset. Each element f
i
of a filter is computed as
follows:
f
i
=
1
n
n
∑
j=1
β
ji
(5)
where f
i
is the array element of the proposed filter,
β is the vector of an example of dataset. The score
of region S
r
is the regional similarity and computed
with the euclidean distances between the ROI and the
filters as shown in the following Equation:
S
r
= d(N
s
,O
s
) −d(P
s
,O
s
)
(6)
where N
s
and P
s
are the optimal sub-vectors of the
negative and positive filters, O
s
is the sub-vector of
ROI feature vector, and d(x,y) is the euclidean dis-
tance.
4 EXPERIMENTAL WORK
Doll
´
ar (Doll
´
ar et al., 2012) (Doll
´
ar et al., 2009)
provided 288 INRIA pedestrian full images for the
benchmarking purpose. The majority of tests in this
paper are carried out against 288 full images. How-
ever, some of the tests are conducted on the first 100
images, which show similar results as for the case of
288 full images. To evaluate the generalisation of the
proposed approach, the test is also performed on the
ETH Bahnhof sequence (Ess et al., 2008), which con-
tains 999 street scenes. The performance of the hu-
man detection systems in terms of the detection ac-
curacy are evaluated using the PASCAL VOC crite-
ria (Everingham et al., 2007). All the algorithms and
systems in the experiments are realised using Matlab
2014 with the relevant mex files. The test computer is
of 2.49GHz Intel i5-4300U CPU running with Win-
dow 8.
4.1 Feature Vectors
Feature Vector: The feature used in the experiments
is the Histograms of Oriented Gradients (HOG)
(Dalal and Triggs, 2006). First of all, a linear
SVM classifier is trained using the MIT pedestrian
dataset. The MIT dataset consists of up-straight
person images which have less dynamic poses. The
positive examples shortlisted from other datasets
using this classifier tends to include rather static
pose examples. The dataset consisting of static pose
examples is used to build an appearance model.
Secondly, a subset of the INRIA dataset is selected
by the classifier. The INRIA dataset offers cropped
2416 positive examples, and also allows to generate
12180 negative examples in the random selection
manner for the training purpose. The classifier
selects 1370 positive and 1579 negative examples
from the training dataset. The negative examples
include 79 false positive examples called ”hard
negative example”. Thirdly, the feature extrac-
tion algorithm introduced in (Felzenszwalb et al.,
2008) is used to compute HOG descriptors for the
experiments with LatSvm-V1 (Feature Vector A).
The algorithm in (Felzenszwalb et al., 2010) is also
used for the tests with LatSvm-V2 (Feature Vector B).
Feature Selection: The proposed feature selection
algorithm is applied to the extracted feature vectors
shown above. From Feature Vector A, the algorithm
selects four optimal feature subsets which have 80%,
60%, 40% and 20% elements of the full feature vec-
tor. The detection system trained with these feature
subsets are referred to as 80HOG, 60HOG, 40HOG,
and 20HOG respectively. 100HOG represents the
system trained with the full feature vector. The algo-
rithm also selects 20%, 15% and 10% elements from
Feature Vector B. They are referred to as 20HOG-V2,
15HOG-V2 and 10HOG-V2 respectively.
k-fold Subsampling based Sequential Backward Feature Elimination
427

Figure 5: Localisation accuracy: The human localisation accuracy of the 10HOG-V2 Filter is compared to that of the root
filter of the LatSvm-V2 Model (Felzenszwalb et al., 2010). Top - Score maps of the 10HOG-V2 filter at three scales. Bottom
- Score maps from the LatSvm-V2 root filter at the identical scale. The score map from the 10HOG-V2 filter shows less noise
than the one of the LatSvm-V2 root filter.
4.2 Full Image Results
Feature Vector A: To evaluate the feature selection
performance, a simple human detection system using
the HOG and the linear SVM (Dalal and Triggs,
2006) is created. Fig.2 (b) shows the detection accu-
racy of the systems trained with the selected feature
subsets from Feature Vector A. The 40HOG, 60HOG
and 80HOG slightly improve the accuracy up to 2%
compared to the system trained with the full feature
set, 100HOG. The detection accuracy is improved
until the 40HOG is applied, which uses less than half
of the full feature vector dimension. The 20HOG
shows no improvement in the detection performance
even though 20% feature vector has the best score in
the local classification score curve as shown in Fig.2
(a). The results of the evaluation reveal that as the
feature selection progresses the proposed algorithm
gradually introduces the overfitting problem. The
window sliding speed is significantly improved. The
100HOG takes 478.634s to scan 1060 ×605 pixels
image. Compared to this, the 20HOG takes only
one tenth of the search time required by the original
system completing the same search within 45.895s.
Feature Vector B: The proposed appearance model
is trained with the 20HOG-V2, 15HOG-V2 and
10HOG-V2. Fig.6(a) shows the evaluation results
of the appearance models. The evaluation is carried
out on the 288 INRIA Full Images, and compared to
the LatSvm-V2 Root filter (Felzenszwalb et al., 2010)
and the appearance models trained with the other fea-
ture selection algorithms. Unlike the classifier depen-
dent systems, the appearance model shows better per-
formance as the feature vector is better optimised, and
no overfitting problem is observed with the appear-
ance models. The 10HOG-V2 model outperforms the
LatSvm-V2 Root filter scoring with a 9% better de-
tection rate. To test the generalisation performance
of the proposed approach, filters trained with the IN-
RIA dataset are directly applied in the experiments
on the ETH Bahnhof sequence (Ess et al., 2008),
which consists of 999 street scenes. The 10HOG-
V2 outperforms all the other filters achieving 2% bet-
ter performance compared to the LatSvm-V2 root fil-
ter as shown in Fig.6 (b). The root filter of the
LatSvm approach (Felzenszwalb et al., 2008)(Felzen-
szwalb et al., 2010) is equivalent to the model from
Dalal’s original HOG approach (Dalal and Triggs,
2006). Therefore, the proposed appearance model
can simply replace the LatSvm root filter. Fig.6 (c)
illustrates the detection performance evaluation of the
Deformable Part Model, LatSvm+10HOG-V2, which
has the proposed appearance model as a root filter.
The evaluation on the 288 INRIA Full Images shows
that the improved performance of the 10HOG-V2 fil-
ter is slightly worse than the LatSvm+10HOG-V2.
The performance decrease can be explained in two-
folds: Firstly, the part filters of the Deformable Part
Model contributes more than the root filter does. On
the first 100 INRIA Full Images, the part filters scores
a 44% detection rate, while the root filter achieves
91%. Secondly, there are many supervised parameters
involved in the Deformable Part Model, and the super-
vised parameters appear to affect the performance of
the LatSvm+10HOG-V2. Therefore, the further op-
timisation is required to make the proposed filter fit
with the Deformable Part Model.
5 CONCLUSION
We have presented a feature selection algorithm
which can generate the optimal feature subset. We
ICPRAM 2016 - International Conference on Pattern Recognition Applications and Methods
428

Figure 6: Performance comparison: (a) Filter detection performance comparison on the 288 INRIA Full Images. (b) Filter
detection performance on the ETH Bahnhof sequence, (c) Comparison to the state-of-the-arts on the 288 INRIA Full Images.
have demonstrated the chosen feature subset can be
used to improve the human detection system, which
relies on the classifier performance, in both speed and
accuracy. It has also been shown that the optimal fea-
tures represent the object shape. Base on this obser-
vation, we have demonstrated that the optimal feature
vector can be directly used to form the appearance
models. This approach does not require highly ac-
curate annotation data of objects to generate models.
Therefore, it can be easily applied to a wide range of
datasets.
REFERENCES
Alpaydin, E. (2004). In Introduction to Machine Learning.
The MIT Press.
Battiti, R. (1994). In Using Mutual Information for Select-
ing Features in Supervised Neural Net Learning. IEEE
Transactions on Neural Networks, Vol. 5, No. 4.
Bermejo, P., Gamez, J. A., and Puerta, J. M. (2011). In
Improving Incremental Wrapper-based Subset Selec-
tion via Replacement and Early Stopping. Interna-
tional Journal of Pattern Recognition and Artificial In-
telligence. Vol. 25.
Chandrashekar, G. and Sahinn, F. (2014). In A survey on
feature selection methods. Journal of Computers and
Electrical Engineering 40, P. 16-28.
Dalal, N. and Triggs, B. (2006). In Histograms of Oriented
Gradients for Human Detection. IEEE Conference on
Computer Vision and Pattern Recognition.
Doll
´
ar, P., Wojek, C., Schiele, B., and Perona, P. (2009).
In Pedestrian Detection: A benchmark. IEEE Confer-
ence on Computer Vision and Pattern Recognition.
Doll
´
ar, P., Wojek, C., Schiele, B., and Perona, P. (2012).
In Pedestrian Detection: An Evaluation of the State
of the Art. IEEE Transactions on Pattern Analysis and
Machine Intelligence.
Ess, A., Leibe, B., Schindler, K., , and van Gool, L. (2008).
In A Mobile Vision System for Robust Multi-Person
Tracking. IEEE Conference on Computer Vision and
Pattern Recognition.
Estevez, P. A., Tesmer, M., Perez, C. A., and Zurada, J. M.
(2009). In Normalized Mutual Information Feature
Selection. IEEE Transactions on Neural Networks,
Vol. 20, No.2.
Everingham, M., Zisserman, A., Williams, C., and Gool,
L. (2007). In The PASCAL visual obiect classes chal-
lenge 2007 results. Technical Report, PASCAL chal-
lenge 2007.
Felzenszwalb, P., Girshick, R., McAllester, D., and Ra-
manan, D. (2010). In Object Detection with Discrim-
inatively Trained Part Based Models. IEEE Confer-
ence on Computer Vision and Pattern Recognition.
Felzenszwalb, P., McAllester, D., and Ramanan, D.
(2008). In A Discriminatively Trained, Multiscale,
Deformable Part Model. IEEE Conference on Com-
puter Vision and Pattern Recognition.
Foithong, S., Pinngern, O., and Attachoo, B. (2012). In
Feature Subset Selection Wrapper based on Mutual
Information and Rough sets. Journal of Expert Sys-
tems with Applications 39, P.574-584, Elsevier.
Gutlein, M., Frank, E., Hall, M., and Karwath, A. (2009). In
Large-scale attribute selection using wrappers. IEEE
Symposium Series on Computational Intelligence and
Data Mining.
Guyon, I. and Elisseeff, A. (2003). In An Introduction to
Variable and Feature Selection. Journal of Machine
Learning Research 3, 1157-1182.
Heng, C. K., Yokomitsu, S., Matsumoto, Y., and Tmura,
H. (2012). In Shrink Boost for Selecting Multi-LBP
Histogram Features in Object Detection. IEEE Con-
ference on Computer Vision and Pattern Recognition.
Javed, K., Babri, H. A., and Saeed, M. (2012). In Fea-
ture Selection Based on Class-Dependent Densities
for High-Dimensional Binary Data. IEEE Transac-
tions on Knowledge and Data Engineering, Vol. 24,
P. 465-477.
Kohavi, R. and John, G. H. (1997). In Wrappers for feature
subset selection. Artificial Intelligence.
Li, K. and Peng, J. (2007). In Neural Input Selection - A fast
model-based approach. Journal of Neurocomputing,
Vol. 70, P. 762-769.
Peng, H., Long, F., , and Ding, C. (2005). In Feature Selec-
tion Based on Mutual Information: Criteria of Max-
Dependency, Max-Relevance, and Min-Redundancy.
k-fold Subsampling based Sequential Backward Feature Elimination
429

IEEE Transactions on Pattern Analysis and Machine
Intelligence, Vol. 27, No. 8.
Pohjalainen, J., Rasanen, O., and Kadioglu, S. (2013). In
Feature Selection methods and Their combinations in
High-dimensional Classification of Speaker Likabil-
ity, Intelligibility and Personality Traits. Journal of
Computer Speech and Language. Elsevier.
Ruiz, R., Riquelme, J., and Aguilar-Ruiz, J. S. (2006).
In Incremental wrapper-based gene selection from
microarray data for cancer classification. Pattern
Recognition, Vol. 39.
Vazquez, D., Marin, J., Lopez, A., Ponsa, D., and Geron-
imo, D. (2014). In Virtual and Real World Adaptation
for Pedestrian Detection. IEEE Transactions on Pat-
tern Analysis and Machine Intelligence.
Vergara, J. R. and Esteves, P. A. (2014). In A review of
Feature Selection method based on Mutual Informa-
tion. Journal of Neural Computing and Applications
24, 175-186.
Yang, Y., Nie, F., Xu, D., Luo, J., Zhuang, Y., and Pan,
Y. (2012). In A Multimedia Retrieval Framework
Based on Semi-Supervised Ranking and Relevance
Feedback. IEEE Transactions on Pattern Analysis and
Machine Intelligence, Vol. 34, No. 4, P. 723-742.
Zhou, H., Miller, P., and Zhang, J. (2011). In Age classifica-
tion using Radon transform and entropy based scaling
SVM. British Machine Vision Conference.
ICPRAM 2016 - International Conference on Pattern Recognition Applications and Methods
430
