
Simultaneous Scheduling of Machines and a Single Moving Robot in a
Job Shop Environment by Metaheuristics based Clustered Holonic
Multiagent Model
Houssem Eddine Nouri, Olfa Belkahla Driss and Khaled Gh´edira
Strat´egies d’Optimisation et Informatique Intelligente, Institut Sup´erieur de Gestion de Tunis, Universit´e de Tunis,
41, Avenue de la Libert´e, Cit´e Bouchoucha, Bardo 2000, Tunis, Tunisie
Keywords:
Scheduling, Transport, Robot, Genetic Algorithm, Tabu Search, Holonic Multiagent.
Abstract:
In systems based robotic cells, the control of some elements such as transport robot has some difficulties when
planning operations dynamically. The Job Shop scheduling Problem with Transportation times and a Single
Robot (JSPT-SR) is a generalization of the classical Job Shop scheduling Problem (JSP) where a set of jobs
additionally have to be transported between machines by a single transport robot. Hence, the JSPT-SR is
more computationally difficult than the JSP presenting two NP-hard problems simultaneously: the job shop
scheduling problem and the robot routing problem. This paper proposes a hybrid metaheuristic approach based
on clustered holonic multiagent model for the JSPT-SR. Firstly, a scheduler agent applies a Neighborhood-
based Genetic Algorithm (NGA) for a global exploration of the search space. Secondly, a set of cluster agents
uses a tabu search technique to guide the research in promising regions. Computational results are presented
using benchmark data instances from the literature of JSPT-SR. New upper bounds are found, showing the
effectiveness of the presented approach.
1 INTRODUCTION
Scheduling is a field of investigation which has known
a significant growth these last years. The scheduling
problems appear in all the economic areas, from com-
puter engineering to industrial production and manu-
facturing. The Job Shop scheduling Problem (JSP),
which is among the hardest combinatorial optimiza-
tion problems (Sonmez and Baykasoglu, 1998), is a
branch of the industrial production scheduling prob-
lems. The JSP is known as one of the most popular
research topics in the literature due to its potential to
dramatically decrease costs and increase throughput
(Jones and Rabelo, 1998). The Job Shop schedul-
ing Problem with Transportation times and a Single
Robot (JSPT-SR) is a generalization of the classical
JSP where a set of jobs additionally have to be trans-
ported between machines by a single transport robot.
Hence, the JSPT-SR is more computationally difficult
than the JSP presenting an additional difficulty caused
by a set of jobs to be transported by a single robot be-
tween a set of available machines. In the JSPT-SR,
we have to consider two NP-hard problems simulta-
neously: the job shop scheduling problem (Lenstra
and Kan, 1979) and the robot routing problem, which
is similar to the pickup and delivery problem (Lenstra
and Kan, 1981).
For the literature of the Job Shop scheduling Prob-
lem with Transportation times and a Single Robot,
most of the researchers have considered the machine
and robot scheduling as two independent problems.
Therefore, only few researchers have emphasized the
importance of simultaneous scheduling of jobs and
the single robot.
To solve this problem, mathematical formulations
are used to find optimal solutions for this problem,
but the complexity of some large instances allowed
to increase the processing time for some important
solutions. (Raman et al., 1986) proposed a mixed
integer programming formulation for this problem,
and they assumed that the robot always returns to the
load/unload station after transferring a load, which re-
duces the flexibility of the robot and influences the
overall schedule length. An integer programming
model is formulated by (Bilge and Ulusoy, 1995) for
the machine and robot scheduling problems with a
set of time window constraints. According to the
authors, the resulting model is intractable in prac-
tice, because of its nonlinearity and its size. (Cau-
mond et al., 2009) adapted a mathematical formula-
Nouri, H., Driss, O. and Ghédira, K.
Simultaneous Scheduling of Machines and a Single Moving Robot in a Job Shop Environment by Metaheuristics based Clustered Holonic Multiagent Model.
DOI: 10.5220/0005694300510062
In Proceedings of the 8th International Conference on Agents and Artificial Intelligence (ICAART 2016) - Volume 2, pages 51-62
ISBN: 978-989-758-172-4
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
51

tion for a shop scheduling problem with one trans-
porter robot. This formulation differed from the
published works because it considered the maximum
number of jobs authorized in the system, the up-
stream and downstream storage capacities and the
robot loaded/unloaded movements.
Moreover,heuristic and metaheuristic methods of-
fered new opportunity to find solutions for this prob-
lem in a reasonable time but they did not guaran-
teed the optimality. (Pundit and Palekar, 1990) imple-
mented a Branch and Bound procedure for a simulta-
neous scheduling of machines and resources handling
in a Job shop environment. But, they did not take
into consideration the violation of precedence rela-
tions between the different machines operations be-
longing to the same job. An iterative heuristic is used
by (Bilge and Ulusoy, 1995) based on the decompo-
sition of the master problem into two sub-problems,
allowing a simultaneous resolution of this scheduling
problem with time windows. (Ulusoy et al., 1997)
adapted a genetic algorithm for this scheduling prob-
lem in a flexible manufacturing system, and where
they used a chromosome representation composed by
two parts, the operation task sequencing and the trans-
port resource assignment. (Anwar and Nagi, 1998)
treated the simultaneous machine and robot schedul-
ing problem using a forward propagation heuristic,
and where they supposed that the robot movements
between cells are considered as additional machines.
A local search algorithm is proposed in (Hurink and
Knust, 2002) and (Hurink and Knust, 2005) for the
job shop scheduling problem with a single robot,
where they supposed that the robot movements can
be considered as a generalization of the travelling
salesman problem with time windows, and additional
precedence constraints must be respected. The used
local search is based on a neighborhood structure in-
spired from (Mastrolilli and Gambardella, 2000) to
make the search process more effective. (Abdel-
maguid et al., 2004) addressed the problem of simul-
taneous scheduling of machines and identical robots
in flexible manufacturing systems, by developing a
hybrid approach composed by a genetic algorithm
and a heuristic. The genetic algorithm is used for
the jobs scheduling problem and the robot assignment
is made by the heuristic algorithm. A hybrid multi-
objective genetic algorithm is proposed by (Reddy
and Rao, 2006) to solve this combined problem, and
considered three minimization objectives, which are
the makespan, mean flow time and mean tardiness.
(Lacomme et al., 2007) studied the job shop schedul-
ing problem with several transport robots, where they
used a local search algorithm based on a neighbour-
hood generated by permutation of two operations or
by assigning another robot to a transport operation.
(Deroussi et al., 2008) addressed the simultaneous
scheduling problem of machines and robots in flex-
ible manufacturing systems, by proposing new solu-
tion representation based on robots rather than ma-
chines. Each solution is evaluated using a discrete
event approach. An efficient neighbouring system is
then implemented into three different metaheuristics:
iterated local search, simulated annealing and their
hybridisation. A differential evolution algorithm is
developed by (Babu et al., 2010) for the machines
and two robots scheduling problem, this algorithm is
inspired by (Storn and Price, 1995) which was pro-
posed for the chebyshev polynomial fitting problem.
(Deroussi and Norre, 2010) considered the flexible
Job shop scheduling problem with transport robots,
where each operation can be realized by a subset of
machines and adding the transport movement after
each machine operation. To solve this problem, an
iterative local search algorithm is proposed based on
classical exchange, insertion and perturbation moves.
Then a simulated annealing schema is used for the ac-
ceptance criterion. A hybrid metaheuristic approach
is proposed by (Zhang et al., 2012) for the flexible Job
Shop problem with transport constraints and bounded
processing times. This hybrid approach is composed
by a genetic algorithm to solve the assignment prob-
lem of operations to machines, and then a tabu search
procedure is used to find new improved schedul-
ing solutions. (Lacomme et al., 2013) solved the
machines and robots simultaneous scheduling prob-
lem in flexible manufacturing systems, by adapting a
memetic algorithm using a genetic coding containing
two parts: a resource selection part for machine oper-
ations and a sequencing part for transport operations.
(Zhang et al., 2014) considered the job shop schedul-
ing problem with transport robots and bounded pro-
cessing times. A modified shifting bottleneck proce-
dure is used coupled with a heuristic for assigning and
sequencing transportation tasks iteratively.
Furthermore, a newly maturing area of the dis-
tributed artificial intelligence are used, providing
some effective mechanisms for the management of
such dynamic operations in manufacturing environ-
ments, such as the multi agent systems. (Braga et al.,
2008) treated the machines and robots scheduling
problem in flexible manufacturing systems. They
proposed a distributed model based on cooperative
agents, composed by five agents: an order-agent,
a store-agent, a set of machine-agents and a set of
robot-agents, using negotiation between them in or-
der to obtain a best scheduling solution for this prob-
lem. (Komma et al., 2011) formulated the ma-
chines and robots scheduling problem in flexible man-
ICAART 2016 - 8th International Conference on Agents and Artificial Intelligence
52

ufacturing systems as a multi-agent system, allow-
ing to realize an Agent-Based Shop Floor Simulator
(ABSFSim). This simulator is composed by eight
agents classified into three categories: The first cat-
egory containing agents with a single instance such
as the part-generator-agent, the arrival-queue-agent
and departure-agent. A second category taking agents
with multiple instances and a long lifetime such as
the machine-agent, the robot-agent, the node-agent
and segment-agent. And for the third category, it
contained agents with multiple instances and a short
lifetime such as the part-agent. A multi-agent ap-
proach is proposed by (Erol et al., 2012) for robots
and machines scheduling problem within a manufac-
turing system. The proposed multi-agent approach
worked under a real-time environment and generated
feasible schedules using negotiation/bidding mecha-
nisms between agents. This approach is composed by
four agents: a manager-agent, a robot-system-holon,
an order-system-holon and a machine-system-holon.
In this paper, we propose a hybridization of two
metaheuristics based on clustered holonic multiagent
model for the job shop scheduling problem with a
single transport robot. This new approach follows
two principal hierarchical steps, where a genetic al-
gorithm is applied by a scheduler agent for a global
exploration of the search space. Then, a tabu search
technique is used by a set of cluster agents to guide the
research in promising regions. Numerical tests were
made to evaluate the performance of our approach
based on the instances of (Hurink and Knust, 2005),
completed by comparisons with other approaches.
The rest of the paper is organized as follows. In
section 2, we define the formulation of the JSPT-SR
with its objective function and a simple problem in-
stance. Then, in section 3, we detail the proposed hy-
brid approach with its holonic multiagent levels. The
experimental and comparison results are provided in
section 4. Finally, section 5 ends the paper with a
conclusion.
2 PROBLEM FORMULATION
There is a set of n jobs J = {J
1
,... ,J
n
} to be processed
without preemption on a set M = {M
0
,M
1
,. .. ,M
m
}
of m + 1 machines (M
0
represents the load/unload or
LU station from which jobs enter and leave the sys-
tem). Each job J
i
is formed by a sequence of ni op-
erations {O
i,1
,O
i,2
,. .. ,O
i,ni
} to be performed succes-
sively according to the given sequence. For each oper-
ation O
i, j
, there is a machine µ
ij
∈ {M
0
,. .. ,M
m
} and
a processing time p
ij
associated with it. In addition,
each job J
i
(J
1
,. .. ,J
n
) is composed by ni − 1 trans-
port operations {T
i,1
,T
i,2
,. .. ,T
i,ni−1
} to be made by a
robot R from one machine to another. In fact, for each
transport operation T
i, j
there is two types of move-
ments: travel transport operation and empty transport
operation.
Firstly, travel transport operation t
µ
i, j
,µ
i, j+1
must be
considered for the robot R when an operation O
i, j
is
processed on machine µ
i, j
and operation O
i, j+1
is pro-
cessed on machine µ
i, j+1
. These transportation times
are job-independentand robot-dependent. Each trans-
portation operation is assumed to be processed by
only one transport robot R which can handle at most
one job at one time. For convenience,t
µ
i, j
,µ
i, j+1
is used
to denote both a transportation operation and a trans-
portation time.
Secondly, empty transport operation t
′
i, j
have to
be considered while the robot R moves from machine
M
i
to machine M
j
without carrying a job. So, it is
possible to assume that t
′
i,i
= 0 and t
i, j
≥ t
′
i, j
.
As in job shop problems, we assume that sufficient
buffer space exists between machines. This assump-
tion is also stated as an “unlimited input/output buffer
capacity”. Jobs processed on one machine M
i
are as-
sumed to wait until the robot affected to this transport
operation is available to do it. No additional time is
required to transfer job from machine to the unlimited
output buffer. In a similar way, each machine M
i
has
an unlimited input buffer to store jobs in waiting to be
processed by it. All data p
ij
, t
µ
i, j
,µ
i, j+1
, t
′
µ
i, j
,µ
i, j+1
are
assumed to be non-negative integers.
The objective is to determine a feasi-
ble schedule which minimizes the makespan
Cmax = Max
j=1,n
{C
j
} where C
j
denotes the comple-
tion time of the last operation O
i,ni
of job J
i
including
the processing times of machine operations and
transport operations.
• Operation completion time
T
i, j
= t
µ
i, j
,µ
i, j+1
+ t
′
µ
i, j
,µ
i, j+1
(1)
O
i, j
= p
i, j
(2)
• Job completion time
C
i
=
n
∑
i=1
i,ni
∑
i,1
O
i, j
+ T
i, j
(3)
for T
i, j
, j ∈ (1,. .. ,ni− 1)
Makespan = max(C
1
,C
2
,C
3
,. .. ,C
n
) (4)
Where i = job, j = operation,t
µ
i, j
,µ
i, j+1
= traveling
moving time, t
′
µ
i, j
,µ
i, j+1
= empty moving time, T
i, j
=
transport operation processing time, p
i, j
= machine
operation processing time.
Simultaneous Scheduling of Machines and a Single Moving Robot in a Job Shop Environment by Metaheuristics based Clustered Holonic
Multiagent Model
53
3 HYBRID METAHEURISTICS
BASED CLUSTERED HOLONIC
MULTIAGENT MODEL
(Glover et al., 1995) elaborated a study about the na-
ture of connections between the genetic algorithm and
tabu search metaheuristics, searching to show the ex-
isting opportunities for creating a hybrid approach
with these two standard methods to take advantage
of their complementary features and to solve diffi-
cult optimization problems. After this pertinent study,
the combination of these two metaheuristics has be-
come more well-known in the literature, which has
motivated many researchers to try the hybridization
of these two methods for the resolution of different
complex problems in several areas.
(Ferber, 1999) defined a multiagent system as an
artificial system composed of a population of au-
tonomous agents, which cooperate with each other to
reach common objectives, while simultaneously each
agent pursues individual objectives. Furthermore, a
multiagent system is a computational system where
two or more agents interact (cooperate or compete, or
a combination of them) to achieve some individual or
collectivegoals. The achievement of these goals is be-
yond the individual capabilities and individual knowl-
edge of each agent (Botti and Giret, 2008).
(Koestler, 1967) gave the first definition of the
term “holon” in the literature, by combining the two
Greek words “hol” meaning whole and “on” meaning
particle or part. He said that almost everything is both
a whole and a part at the same time. In fact, a holon
is recursively decomposed at a lower granularity level
into a community of other holons to produce a hol-
archy (Calabrese, 2011). Moreover, a holon may be
viewed as a sort of recursive agent, which is a super-
agent composed by a sub-agents set, where each sub-
agent has its own behavior as a complementary part
of the whole behaviour of the super-agent. Holons
are agents able to show an architectural recursiveness
(Giret and Botti, 2004).
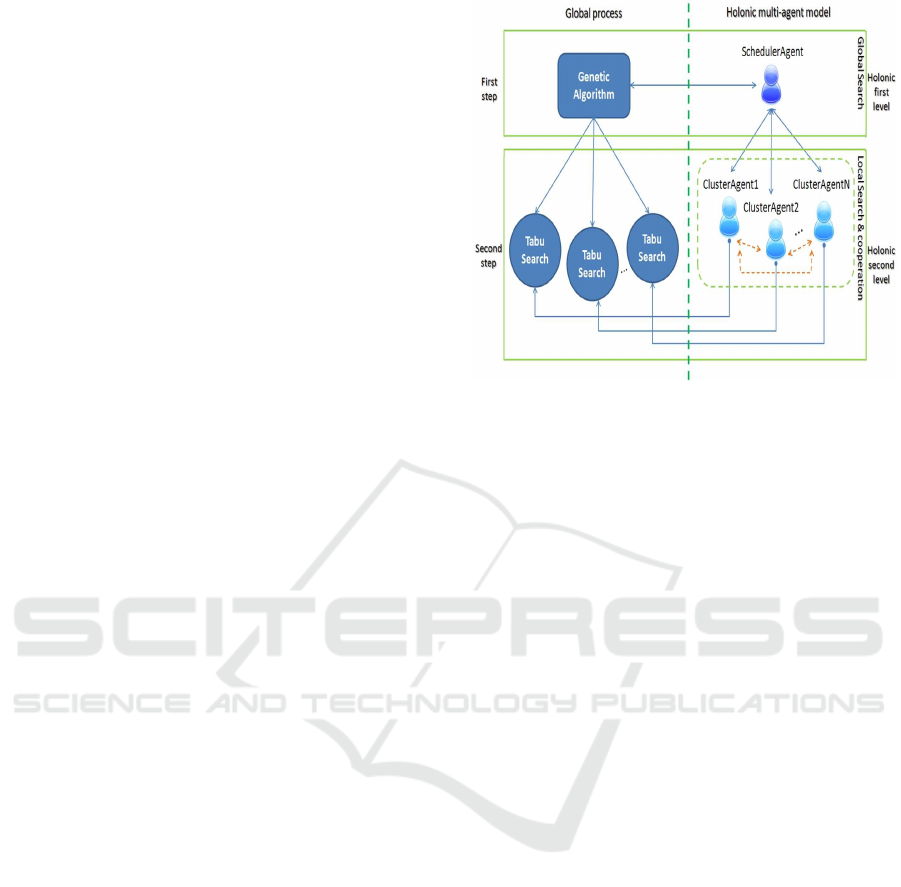
In this work, we propose a hybrid metaheuristic
approach based on clustering processing two general
steps: a first step of global exploration using a ge-
netic algorithm to find promising areas in the search
space and a clustering operator allowing to regroup
them in a set of clusters. In the second step, a tabu
search algorithm is applied to find the best individ-
ual solution for each cluster. The global process of
the proposed approach is implemented in two hierar-
chical holonic levels adopted by a recursive multia-
gent model, named a hybrid Genetic Algorithm with
Tabu Search based on clustered Holonic Multiagent
model (GATS+HM), see Figure 1. The first holonic
Figure 1: Hybrid metaheuristics based clustered holonic
multiagent model.
level is composed by a Scheduler Agent which is the
Master/Super-agent, preparing the best promising re-
gions of the search space, and the second holonic
level containing a set of Cluster Agents which are the
Workers/Sub-agents, guiding the search to the global
optimum solution of the problem. Each holonic level
of this model is responsible to process a step of the hy-
brid metaheuristic approach and to cooperate between
them to attain the global solution of the problem.
In fact, the choice of this new metaheuristic hy-
bridization is justified by that the standard meta-
heuristic methods use generally the diversification
techniques to generate and to improve many differ-
ent solutions distributed in the search space, or by
using local search techniques to generate a more im-
proved set of neighbourhood solutions from an ini-
tial solution. But they did not guarantee to attain
promising areas with good fitness converging to the
global optimum despite the repetition of many iter-
ations, that is why they need to be more optimized.
So, the novelty of our approach is to launch a genetic
algorithm based on a diversification technique to only
explore the search space and to select the best promis-
ing regions by the clustering operator. Then, apply-
ing the intensification technique of the tabu search al-
lowing to relaunch the search from an elite solution
of each cluster autonomously to attain more domi-
nant solutions of the search space. The use of a mul-
tiagent system gives the opportunity for distributed
and parallel treatments which are very complimen-
tary for the second step of the proposed approach.
Indeed, our combined metaheuristic approach fol-
lows the paradigm of “Master” and “Workers” which
are two recursive hierarchical levels adaptable for a
holonic multiagent model, where the Scheduler Agent
ICAART 2016 - 8th International Conference on Agents and Artificial Intelligence
54

is the Master/Super-agent of its society and the Clus-
ter Agents are its Workers/Sub-agents.
3.1 Non Oriented Disjunctive Graph
In this work, we chose to use the disjunctive graph of
(Hurink and Knust, 2005) for the job shop problem
with transportation times and one robot. To explain
this graph, a sample problem of three jobs and five
machines with their transportation times for a single
robot R is presented in Table 1.
Table 1: One instance of job shop problem with a single
robot.
Processing times for each job J
i
Job1 : M5(1) M4(4)
Job2 : M1(1) M3(6) M2(5)
Job3 : M3(6) M1(3)
Transportation times for the robot R
M1 M2 M3 M4 M5
M1 0 1 2 3 4
M2 1 0 1 2 3
M3 2 1 0 1 2
M4 3 2 1 0 1
M5 4 3 2 1 0
The disjunctive graph G = (V
m
∪V
t
,C∪ D
m
∪ D
r
),
see Figure 2, is composed by : a set of vertices V
m
containing all machine operations, a set of vertices
V
t
is the set of transport operations obtained by as-
signing the robot R to each transport operation, and
two dummy nodes 0 and ∗. Also, this graph consists
of: a set of conjunctions C representing precedence
constraints O
i,k
→ t
µ
i,k
,µ
i,k+1
→ O
i,k+1
, undirected dis-
junctions for machines D
m
, and undirected disjunc-
tions for the transport robot D
r
. For each job J
i
, ni− 1
transport operations t
µ
i,k
,µ
i,k+1
are introduced includ-
ing precedence O
i,k
→ t
µ
i,k
,µ
i,k+1
→ O
i,k+1
. In fact,
the robot R may be considered as an additional “ma-
chine” which has to process all these transport opera-
tions. The arcs from machine node to transport node
are weighted with the machine operation durations.
Edges between machine operations represent disjunc-
tions for machine operations which have to be pro-
cessed on the same machine and cannot use it simul-
taneously.
As for the classical job shop, the conjunctions C
model the execution order of operations within ech
job J
i
. In addition to the classical set of undirected
machine disjunctions D
m
(all pairs of machine opera-
tions which have to be processed on the same machine
and which are not linked by a directed path), it is nec-
essary to consider the set of undirected robot disjunc-
Figure 2: Non oriented disjunctive graph.
tions D
r
(all pairs of transport operations which have
to be transported by the robot R and which are not
linked by a directed path). To solve the scheduling
problem it is necessary to turn all undirected arcs in
D
m
∪ D
r
into directed ones, and to assign the robot
R to each transport operation, where the final graph
becomes an oriented disjunctive graph.
3.2 Scheduler Agent
The Scheduler Agent (SA) is responsible to process
the first step of the hybrid algorithm by using a genetic
algorithm called NGA (Neighborhood-based Genetic
Algorithm) to identify areas with high average fitness
in the search space during a fixed number of iterations
MaxIter, see Figure 3. In fact, the goal of using the
NGA is only to explore the search space, but not to
find the global solution of the problem. Then, a clus-
tering operator is integrated to divide the best identi-
fied areas by the NGA in the search space to different
parts where each part is a cluster CL
i
∈ CL the set of
clusters, where CL = {CL
1
,CL
2
,. .. ,CL
N
}. In addi-
tion, this agent plays the role of an interface between
the user and the system (initial parameter inputs and
final result outputs). According to the number of clus-
ters N obtained after the integration of the cluster-
ing operator, the SA creates N Cluster Agents (CAs)
preparing the passage to the next step of the global al-
gorithm. After that, the SA remains in a waiting state
until the reception of the best solutions found by the
CAs for each cluster CL
i
. Finally, it finishes the pro-
cess by displaying the final solution of the problem.
3.2.1 Individual’s Solution Presentation based
Oriented Disjunctive Graph
The Job Shop scheduling Problem with Transporta-
tion times and a Single Robot is composed by two
Simultaneous Scheduling of Machines and a Single Moving Robot in a Job Shop Environment by Metaheuristics based Clustered Holonic
Multiagent Model
55

Figure 3: First step of the global process by the Scheduler
Agent.
sub-problems: firstly the machines and robot selec-
tion, secondly the operationsscheduling problem, that
is why the chromosome representation is encoded in
two parts: Machines and Robot Selection part (MRS),
and Job and Transport operation Sequence part (JTS),
see Figure 4.
Figure 4: The chromosome representation of a scheduling
solution.
The first part MRS is a vector V
1
with a length
L equal to the total number of operations and where
each index represents the selected machine or robot
to process an operation indicated at position p, see
Figure 4 (a). For example p = 3 and p = 7, V
1
(3)
is the selected machine M
4
for the operation O
1,2
and V
1
(7) is the selected robot R
1
for the operation
T
2,2
. The second part JTS is a vector V
2
having
the same length of V
1
and where each index repre-
sents a machine operation O
i, j
or a transport oper-
ation T
i, j
according to the predefined operations for
each job, see Figure 4 (b). For example this operation
sequence 1-2-1-1-3-2-3-2-3-2-2 can be translated to:
(O
1,1
,M
5
) → (O
2,1
,M
1
) → (T
1,1
,R) → (O
1,2
,M
4
) →
(O
3,1
,M
3
) → (T
2,1
,R) → (T
3,1
,R) → (O
2,2
,M
3
) →
(O
3,2
,M
1
) → (T
2,2
,R) → (O
2,3
,M
2
). In addition, for
each job J
i
(J
1
,. .. ,J
i
) ni − 1 transport operations are
generated T
1,1
, T
2,1
, T
2,2
and T
3,1
, and scheduled fol-
lowing the presented solution in vector JTS, allowing
to fix the final path to be considered by the robot R
during the shop process, see Figure 5.
Figure 5: Final path of the robot R.
Figure 6: Exemple of oriented machine and robot disjunc-
tions.
To model an oriented disjunctive graph we should
consider some rules. Let the example in Figure 6, if
the edge is oriented in the direction O
i,k
→ O
j,k
′
it gets
the weight p
i,k
, else it takes p
j,k
′
in the inverse case.
If an arc is added from T
i,k
to T
j,k
′
, its gets the weight
t
O
i,k
,O
i,k+1
+t
′
O
i,k+1
,O
j,k
′
and t
O
j,k
′
,O
j,k
′
+1
+t
′
O
j,k
′
+1
,O
i,k
if
it is oriented in the other direction. Thus, basing
on (Hurink and Knust, 2005) we can define a fixed
machine selection S
m
called directed Machine Dis-
junctions and a fixed transport selection S
r
called di-
rected Transport Disjunctions, with their precedence
relations C called operation Conjunctions. So, a
fully oriented disjunctive graph can be obtained us-
ing
ˆ
S = C ∪ S
m
∪ S
r
, which is called a complete se-
lection. In fact, the selections of the two sets of dis-
junctions S
m
and S
r
with their set of conjunctions C
are based on the two proposed vectors MRS and JTS,
where MRS allows to present the selected machines
to process job operations and the selected robot to
process transport operations. JTS presents the ex-
ecution order of the job and transport operations in
their selected machines and robot allowing to fix the
final Machine and Transport Disjunctions S
m
∪S
r
with
their set of Conjunctions C representing the prece-
dence relations between the different operations. The
union C ∪ S
m
∪ S
r
=
ˆ
S fully describes a solution if the
resulting oriented disjunctive graph G = (V
m
,V
t
,
ˆ
S) is
acyclic. A feasible schedule can be constructed by
longest path calculation which permits to obtain the
ICAART 2016 - 8th International Conference on Agents and Artificial Intelligence
56
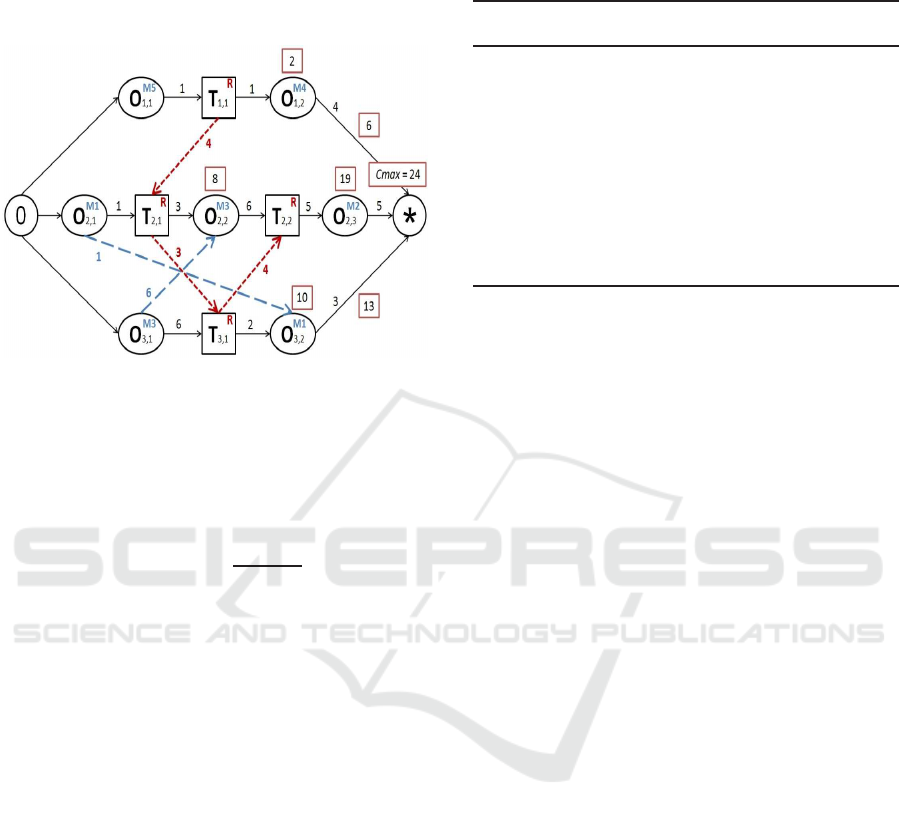
earliest starting time of both machine and transport
operations and fully defines a semi-active schedule
with the Cmax given by the length of the longest path
from node 0 to *, see Figure 7.
Figure 7: Oriented disjunctive graph.
Noting that the chromosome fitness is calculated
by Fitness(i) which is the fitness function of each
chromosome i and Cmax(i) is its makespan value,
where i ∈ {1, .. ., P} and P is the total population size,
see Equation (5).
Fitness(i) =
1
Cmax(i)
(5)
3.2.2 Population Initialization
The initial population is generated randomly follow-
ing a uniform law and based on a neighborhood pa-
rameter to make the individual solutions more diver-
sified and distributed in the search space. In fact, each
new solution should have a predefined distance with
all the other solutions to be considered as a new mem-
ber of the initial solution. The used method to deter-
minate the neighborhood parameter is inspired from
(Bozejko et al., 2010), which is based on the permuta-
tion level of operations to obtain the distance between
two solutions. In fact, the dissimilarity distance is cal-
culated by verifying the difference between two chro-
mosomes in terms of the execution order of all the
shop operations O
i, j
and T
i, j
in the Job and Transport
operation Sequence V
2
(JTS). So, if there is a differ-
ence in the vectorV
2
, the distance is incremented by 1
because it is in the order of O(1). Let Chrom
1
(JTS
1
)
and Chrom
2
(JTS
2
) two chromosomes of two differ-
ent scheduling solutions, L is the total number of op-
erations of all jobs and Dist is the dissimilarity dis-
tance. The distance is calculated by verifying the ex-
ecution order difference of the Job and Transport op-
eration Sequence vectors JTS
1
and JTS
2
which is in
order of O(1), we give here how to proceed in Algo-
rithm 1 :
Algorithm 1: How to calculate the dissimilarity distance
between two solutions.
1: procedure
2: Dist ← 0,k ← 1
3: for k from 1 to L do
4: if Chrom1(JTS
1
(k)) 6= Chrom2(JTS
2
(k))
then
5: Dist ← Dist + 1
6: end if
7: end for
8: return Dist
9: end procedure
Noting that Distmax is the maximal dissimilar-
ity distance and it is calculated by Equation (6), rep-
resenting 100% of difference between two chromo-
somes.
Distmax =
n
∑
i=1
i,ni
∑
i,1
1 (6)
3.2.3 Selection Operator
The selection operator is used to select the best par-
ent individuals to prepare them to the crossover step.
This operator is based on the fitness function al-
lowing to analyze the quality of each selected solu-
tion. But progressively the fitness values will be sim-
ilar for the most individuals. That is why, we in-
tegrate the neighborhood parameter, where we pro-
pose a new combined parent selection operator named
Fitness-Neighborhood Selection Operator (FNSO) al-
lowing to add the dissimilarity distance parameter
to the fitness function to select the best parents for
the crossover step. The FNSO chooses in each it-
eration two parent individuals until engaging all the
population to create the next generation. The first
parent takes successively in each case a solution i,
where i∈ {1,...,P} and P is the total population size.
The second parent obtains its solution j randomly
by the roulette wheel selection method based on the
two Fitness and Neighborhood parameters relative to
the selected first parent, where j ∈ {1,. .. ,P} \ {i}
in the P population and where j 6= i. In fact, to use
this random method, we should calculate the Fitness-
Neighborhood total FN for the population, see Equa-
tion (7), the selection probability sp
k
for each indi-
vidual I
k
, see Equation (8), and the cumulative prob-
ability cp
k
, see Equation (9). After that, a random
number r will be generated from the uniform range
[0,1]. If r ≤ cp
1
then the second parent takes the
first individual I
1
, else it gets the k
th
individual I
k
∈
Simultaneous Scheduling of Machines and a Single Moving Robot in a Job Shop Environment by Metaheuristics based Clustered Holonic
Multiagent Model
57

{I
2
,. .. ,I
P
} \ {I
i
} and where cp
k−1
< r ≤ cp
k
. For
Equations (7), (8) and (9), k = {1,2,. .. ,P} \ {i}.
• The Fitness-Neighborhood total for the popula-
tion:
FN =
P
∑
k=1
[1/(Cmax[k] × Neighborhood[i][k])]
(7)
• The selection probability sp
k
for each individual
I
k
:
sp
k
=
1/(Cmax[k] × Neighborhood[i][k])
FN
(8)
• The cumulative probability cp
k
for each individ-
ual I
k
:
cp
k
=
k
∑
h=1
sp
h
(9)
3.2.4 Crossover Operator
The crossover operator has an important role in the
global process, allowing to combine in each case the
chromosomes of two parents in order to obtain new
individuals and to attain new better parts in the search
space. In this work, this operator is applied only for
the parent chromosome vector V
2
(JTS).
JTS Crossover. An improved precedence preserv-
ing order-based on crossover (iPOX), inspired from
(Lee et al., 1998), is adapted for the parent opera-
tion vector JTS. This iPOX operator is applied fol-
lowing four steps, a first step is selecting two par-
ent operation vectors (JTS
1
and JTS
2
) and generat-
ing randomly two job sub-sets Js
1
/Js
2
from all jobs.
A second step is allowing to copy any element in
JTS
1
/JTS
2
that belong to Js
1
/Js
2
into child individ-
ual JTS
′
1
/JTS
′
2
and retain them in the same position.
Then the third step deletes the elements that are al-
ready in the sub-set Js
1
/Js
2
from JTS
1
/JTS
2
. Finally,
fill orderly the empty positions in JTS
′
1
/JTS
′
2
with the
reminder elements of JTS
2
/JTS
1
in the fourth step,
see the example in the Figure 8.
Figure 8: JTS crossover exemple.
3.2.5 Mutation Operator
The mutation operator is integrated to promote the
children generation diversity. In fact, this operator
is applied on the chromosomes of the new generated
children by the JTS crossover operator.
JTS Mutation. This operator selects randomly two
indexes index
1
and index
2
from the vector JTS. Next,
it changes the position of the job number in the index
1
to the second index
2
and inversely, see Figure 9.
Figure 9: JTS mutation exemple.
3.2.6 Replacement Operator
The replacement operator has an important role to
prepare the remaining surviving population to be con-
sidered for the next iterations. This operator replaces
in each case a parent by one of its children which has
the best fitness in its current family.
Figure 10: The final population transformation by applying
the clustering operator.
3.2.7 Clustering Operator
By finishing the maximum iteration number Max-
Iter of the genetic algorithm, the Scheduler Agent
applies a clustering operator using the hierarchical
ICAART 2016 - 8th International Conference on Agents and Artificial Intelligence
58

clustering algorithm of (Johnson, 1967) to divide
the final population into N Clusters, see Figure 10,
to be treated by the Cluster Agents in the second
step of the global process. The clustering operator
is based on the neighbourhood parameter which
is the dissimilarity distance between individuals.
The clustering operator starts by assigning each
individual Indiv(i) to a cluster CL
i
, so if we have P
individuals, we have now P clusters containing just
one individual in each of them. For each case, we
fixe an individual Indiv(i) and we verify successively
for each next individual Indiv( j) from the remaining
population (where i and j ∈ {1, .. ., P},i 6= j) if the
dissimilarity distance Dist between Indiv(i) and
Indiv( j) is less than or equal to a fixed threshold
Dist fix (representing a percentage of difference X%
relatively to Distmax, see Equation (10)) and where
Cluster(Indiv(i)) 6= Cluster(Indiv( j)). If it is the
case, Merge(Cluster(Indiv(i)),Cluster(Indiv( j))),
else continue the search for new combination with
the remaining individuals. The stopping condition is
by browsing all the population individuals, where we
obtained at the end N Clusters.
Dist fix = Distmax× X% (10)
Figure 11: Distribution of the Cluster Agents in the different
clusters of the search space.
3.3 Cluster Agents
Each Cluster Agent CA
i
is responsible to apply suc-
cessively to each cluster CL
i
a local search technique
which is the Tabu Search algorithm to guide the re-
search in promising regions of the search space and
to improve the quality of the final population of the
genetic algorithm. In fact, this local search is exe-
cuted simultaneously by the set of the CAs agents,
where each CA starts the research from an elite solu-
tion of its cluster searching to attain new more dom-
inant individual solutions separately in its assigned
Figure 12: Second step of the global process by the Cluster
Agents.
cluster CL
i
, see Figure 11. The used Tabu Search al-
gorithm is based on an intensification technique al-
lowing to start the research from an elite solution in
a cluster CL
i
(a promising part in the search space) in
order to collect new scheduling sequence minimizing
the makespan. Let E the elite solutionof a clusterCL
i
,
E
′
∈ N(E) is a neighbor of the elite solution E, GL
i
is
the Global List of eachCA
i
to receive new found elite
solutions by the remaining CAs, each CL
i
plays the
role of the tabu list with a dynamic length and Cmax is
the makespan of the obtained solution. So, the search
process of this local search starts from an elite solu-
tion E using the move and insert method of (Mas-
trolilli and Gambardella, 2000), where each Cluster
Agent CA
i
changes the execution order of an opera-
tion (O
i, j
if machine operation or T
i, j
if transport oper-
ation) from an index i to another index k in the vector
JTS, searching to generate new scheduling combina-
tion E
′
∈ N(E). After that, verifying if the makespan
value of this new generated solution Cmax(E
′
) dom-
Algorithm 2: The local search process.
1: procedure
2: E ← Elite(CL
i
)
3: while N(E) 6=
/
0 do
4: E
′
← Move-and-insert(E) | E
′
∈ N(E) |
E
′
/∈ CL
i
5: if Cmax(E
′
) < Cmax(E) and E
′
/∈ GL
i
then
6: E ← E
′
7: CL
i
← E
′
8: Send-to-all(E
′
, CA
i
)
9: end if
10: end while
11: return E
12: end procedure
Simultaneous Scheduling of Machines and a Single Moving Robot in a Job Shop Environment by Metaheuristics based Clustered Holonic
Multiagent Model
59

inates Cmax(E) (Cmax(E
′
) < Cmax(E)), and if it is
the case CA
i
saves E
′
in its tabu list (which is CL
i
)
and sends it to all the other CAs agents to be placed
in their Global Lists GLs(E
′
,CA
i
), to ensure that it
will not be used again by them as a search point. Else
continues the neighborhood search from the current
solution E. The stopping condition is by attaining the
maximum allowed number of neighbors for a solution
E without improvement, see Figure 12. We give here
how to proceed in Algorithm 2 :
By finishing this local search step, the CAs agents
terminate the process by sending their last best solu-
tions to the SA agent, which considers the best one of
them as the global solution for the JSPT-SR.
4 EXPERIMENTAL RESULTS
4.1 Experimental Setup
The proposed GATS+HM is implemented in java lan-
guage on a 2.10 GHz Intel Core 2 Duo processor and 3
Gb of RAM memory, where we use the Integrated De-
velopment Environment (IDE) Eclipse to code the al-
gorithm and the multiagent platform Jade (Bellifem-
ine et al., 1999) to create the different agents of our
holonic model. To evaluate its efficiency, numeri-
cal tests are made based on the benchmark instances
of (Hurink and Knust, 2005) from the literature of
the JSPT-SR, which consists of two sets P1(6 × 6)
and P2(10× 10) inspired from (Muth and Thompson,
1963). In both instances the number of operations per
job is equal to the number of machines and each job is
processed on each machine exactly once with a fixed
processing time. This shop problem considers a sin-
gle moving robot for all transport operations, where
various test instances were obtained by adding trans-
portation and empty moving times with differentchar-
acteristics.
Due to the non-deterministic nature of the pro-
posed approach, we run it ten independent times for
each case of the (Hurink and Knust, 2005) benchmark
instances in order to obtain significant results. The
used parameter settings for our algorithm are adjusted
experimentally and presented as follow: the crossover
probability = 1.0, the mutation probability = 0.5, the
maximum number of iterations = 1000 and the popu-
lation size = 200. The computational results are pre-
sented by three metrics in Table 2, such as the best
makespan, the CPU time of our GATS+HM in min-
utes and the gap between our approach and the best
results in the literature of the JSPT-SR, which is cal-
culated by Equation (11). The Mko is the makespan
obtained by Our approach and Mkc is the makespan
of one of the chosen algorithms for Comparisons.
Gap = [(Mko− Mkc)/Mkc] × 100% (11)
4.2 Experimental Comparisons
To show the efficiency of our GATS+HM approach,
we compare its obtained results from the (Hurink
and Knust, 2005) benchmark instances with other al-
gorithms from the literature of the JSPT-SR, which
have obtained the best upper bounds for this prob-
lem. The chosen algorithms are : the one-stage ap-
proach (UB
one
) of (Hurink and Knust, 2005) (with
their known lower bound LB) which obtained the first
results in the literature for their proposed instances,
the genetic algorithm-tabu search procedure (GATS)
of (Zhang et al., 2012) and the hybrid memetic algo-
rithm (BFS) of (Lacomme et al., 2013) which are two
recent hybrid metaheuristic approaches.
From Table 2, the comparison results show that
the GATS+HM obtains twelve out of fifteen best re-
sults for the (Hurink and Knust, 2005) instances,
where we attain ten new upper bounds and two sim-
ilar results. Indeed, our algorithm outperforms the
UB
one
in eleven out of fifteen instances with a max-
imum gap of -7,80% for the P02-T5-t2 instance, and
it gets slightly worse result for three instances with a
maximum gap of 1,21% for the P02-D3-d1 instance.
Moreover, our GATS+HM outperforms the BFS in
twelve out of fifteen instances with a maximum gap
of -4,13% for the P02-T2-t1 instance, and it gets
one bad result for the P01-D2-d1 instance with a gap
of 0,68%. For the comparison with the GATS, the
GATS+HM obtains fourteen out of fifteen best results
with a maximum gap of -30,52% for the P02-D2-d1
instance.
By analyzing the computational time in few min-
utes and the comparison results of our approach in
terms of makespan, we can distinguish the efficiency
of the new proposed GATS+HM relatively to the lit-
erature of the JSPT-SR. This efficiency is explained
by the flexible selection of the promising parts of the
search space by the clustering operator after the ge-
netic algorithm process and by applying the intensi-
fication technique of the tabu search allowing to start
from a set of elite solutions to attain new more domi-
nant solutions.
5 CONCLUSION
In this paper, we present a new metaheuristic hy-
bridization approach based on clustered holonic
multiagent model, called GATS+HM, for the job
ICAART 2016 - 8th International Conference on Agents and Artificial Intelligence
60

Table 2: Results of (Hurink and Knust, 2005) data instances.
Instance LB Gap
LB
UB
one
Gap
UB
one
BFS Gap
BFS
GATS Gap
GATS
GATS+HM
CPU
Time
P01.D1-d1 82 2,44 87 -3,45 87 -3,45 96 -12,50 84 0,30
P01.D1-t1 77 2,60 81 -2,47 81 -2,47 83 -4,82 79 0,27
P01.D2-d1 147 1,36
148 0,68 148 0,68 155 -3,87 149 0,29
P01.D3-d1 213 0,00 217 -1,84 213 0,00 220 -3,18 213 0,28
P01.T2-t1 71 1,41 74 -2,70 74 -2,70 79 -8,86
72 0,26
P01.T3-t0 92 0,00 92 0,00 92 0,00 92 0,00 92 0,19
P02.D1-d1 880 10,57 1044 -6,80 1012 -3,85 1339 -27,33
973 6,15
P02.D1-t0 880 12,50 1042 -4,99 1017 -2,65 1352 -26,78 990 4,26
P02.D1-t1 880 11,36 1016 -3,54 983 -0,31 1337 -26,70
980 4,56
P02.D2-d1 892 12,56 1070 -6,17 1045 -3,92 1445 -30,52 1004 8,53
P02.D3-d1 906 19,54
1070 1,21 1100 -1,55 1516 -28,56 1083 11,45
P02.D5-t2 1167 13,71 1325 0,15 1361 -2,50 1689 -21,43 1327 13,15
P02.T1-t1 874 8,35 1006 -5,86 978 -3,17 1322 -28,37
947 7,14
P02.T2-t1 880 8,18 1015 -6,21 993 -4,13 1279 -25,57 952 7,31
P02.T5-t2 898 13,14 1102 -7,80 1022 -0,59 1339 -24,12
1016 9,25
shop scheduling problem with tansportation times
and a single robot (JSPT-SR). In this approach, a
neighborhood-basedgenetic algorithm is adapted by a
scheduler agent for a global exploration of the search
space. Then, a local search technique is applied by a
set of cluster agents to guide the research in promising
regions of the search space and to improve the quality
of the final population. To measure its performance,
numerical tests are made using benchmark data in-
stances from the literature of JSPT-SR, and where
new upper bounds are found showing the effective-
ness of the presented approach. In the future work,
we will search to treat other extensions of the JSPT-
SR, such as the general case of this problem where a
set of robots can be used for the transport oprations,
and by considering the machine assignment problem
for each operation in the shop process. So, the prob-
lem becomes a Flexible Job Shop scheduling Problem
with Tansportation times and Many Robots (FJSPT-
MR). Thus, we will make improvements in the chro-
mosome first part MRS to adapt it to this new trans-
formation and study its effects on the makespan.
REFERENCES
Abdelmaguid, T. F., Nassef, A. O., Kamal, B. A., and Has-
san, M. F. (2004). A hybrid ga/heuristic approach
to the simultaneous scheduling of machines and auto-
mated guided vehicles. International Journal of Pro-
duction Research, 42(2):267–281.
Anwar, M. F. and Nagi, R. (1998). Integrated scheduling
of material handling and manufacturing activities for
just-in-time production of complex assemblies. Inter-
national Journal of Production Research, 36(3):653–
681.
Babu, A. G., Jerald, J., Haq, A. N., Luxmi, V. M., and
Vigneswaralu, T. P. (2010). Scheduling of machines
and automated guided vehicles in fms using differen-
tial evolution. International Journal of Production Re-
search, 48(16):4683–4699.
Bellifemine, F., Poggi, A., and Rimassa, G. (1999). Jade -
a fipa-compliant agent framework. In In Proceedings
of the fourth International Conference and Exhibition
on The Practical Application of Intelligent Agents and
Multi-Agent Technology, pages 97–108.
Bilge, U. and Ulusoy, G. (1995). A time window approach
to simultaneous scheduling of machines and material
handling system in an fms. Operations Research,
43(6):1058–1070.
Botti, V. and Giret, A. (2008). ANEMONA: A Multi-
agent Methodology for Holonic Manufacturing Sys-
tems. Springer Series in Advanced Manufacturing.
Springer-Verlag.
Bozejko, W., Uchronski, M., and Wodecki, M. (2010). The
new golf neighborhood for the flexible job shop prob-
lem. In In Proceedings of the International Confer-
ence on Computational Science, pages 289–296.
Braga, R. A. M., Rossetti, R. J. F., Reis, L. P., and Oliveira,
E. C. (2008). Applying multi-agent systems to simu-
late dynamic control in flexible manufacturing scenar-
ios. In European Meeting on Cybernetics and Systems
Research, volume 2, pages 488–493. Austrian Society
for Cybernetic Studies.
Calabrese, M. (2011). Hierarchical-granularity holonic
modelling. Doctoral thesis, Universita degli Studi di
Milano, Milano, Italy.
Caumond, A., Lacomme, P., Moukrim, A., and Tchernev,
N. (2009). An milp for scheduling problems in an fms
with one vehicle. European Journal of Operational
Research, 199(3):706–722.
Deroussi, L., Gourgand, M., and Tchernev, N. (2008). A
simple metaheuristic approach to the simultaneous
scheduling of machines and automated guided vehi-
Simultaneous Scheduling of Machines and a Single Moving Robot in a Job Shop Environment by Metaheuristics based Clustered Holonic
Multiagent Model
61

cles. International Journal of Production Research,
46(8):2143–2164.
Deroussi, L. and Norre, S. (2010). Simultaneous schedul-
ing of machines and vehicles for the flexible job shop
problem. In International Conference on Metaheuris-
tics and Nature Inspired Computing, pages 1–2.
Erol, R., Sahin, C., Baykasoglu, A., and Kaplanoglu, V.
(2012). A multi-agent based approach to dynamic
scheduling of machines and automated guided vehi-
cles in manufacturing systems. Applied Soft Comput-
ing, 12(6):1720–1732.
Ferber, J. (1999). Multi-Agent Systems: An Introduction
to Distributed Artificial Intelligence. Addison-Wesley
Longman Publishing Co., Inc., Boston, MA, USA, 1st
edition.
Giret, A. and Botti, V. (2004). Holons and agents. Journal
of Intelligent Manufacturing, 15(5):645–659.
Glover, F., Kelly, J. P., and Laguna, M. (1995). Genetic
algorithms and tabu search: Hybrids for optimization.
Computers and Operations Research, 22(1):111–134.
Hurink, J. and Knust, S. (2002). A tabu search algorithm for
scheduling a single robot in a job-shop environment.
Discrete Applied Mathematics, 119(1-2):181–203.
Hurink, J. and Knust, S. (2005). Tabu search algorithms for
job-shop problems with a single transport robot. Eu-
ropean Journal of Operational Research, 162(1):99–
111.
Johnson, S. C. (1967). Hierarchical clustering schemes.
Psychometrika, 32(3):241–254.
Jones, A. and Rabelo, L. C. (1998). Survey of job shop
scheduling techniques. Tech. rep., National Institute
of Standards and Technology, Gaithersburg, USA.
Koestler, A. (1967). The Ghost in the Machine. Hutchinson,
London, United Kingdom, 1st edition.
Komma, V. R., Jain, P. K., and Mehta, N. K. (2011). An
approach for agent modeling in manufacturing on jade
reactive architecture. The International Journal of Ad-
vanced Manufacturing Technology, 52(9-12):1079–
1090.
Lacomme, P., Larabi, M., and Tchernev, N. (2007).
A disjunctive graph for the job-shop with several
robots. In Multidisciplinary International Conference
on Scheduling : Theory and Applications, MISTA,
pages 285–292, Paris, France.
Lacomme, P., Larabi, M., and Tchernev, N. (2013). Job-
shop based framework for simultaneous scheduling of
machines and automated guided vehicles. Interna-
tional Journal of Production Economics, 143(1):24–
34.
Lee, K., Yamakawa, T., and Lee, K. M. (1998). A ge-
netic algorithm for general machine scheduling prob-
lems. In In Proceedings of the second IEEE inter-
national Conference on Knowledge-Based Intelligent
Electronic Systems, pages 60–66.
Lenstra, J. K. and Kan, A. H. G. R. (1979). Compu-
tational complexity of scheduling under precedence
constraints. Annals of Discrete Mathematics, 4:121–
140.
Lenstra, J. K. and Kan, A. H. G. R. (1981). Complexity of
vehicle routing and scheduling problems. Networks,
11(2):221–227.
Mastrolilli, M. and Gambardella, L. (2000). Effective
neighbourhood functions for the flexible job shop
problem. Journal of Scheduling, 3(1):3–20.
Muth, J. F. and Thompson, G. L. (1963). Industrial Schedul-
ing. International series in management. Prentice-
Hall.
Pundit, R. and Palekar, U. (1990). Job shop scheduling with
explicit material handling considerations. Technical
report, Univ. of Illinois at Urbana-Champaign, Dept.
of M. and I.E.
Raman, N., Talbot, F. B., and Rachamadgu, R. V. (1986).
Simultaneous scheduling of machines and material
handling devices in automated manufacturing. In In
Proceedings of the 2nd ORSA/TIMS Conference on
Flexible Manufacturing Systems, pages 455–466.
Reddy, B. S. P. and Rao, C. S. P. (2006). A hybrid multi-
objective ga for simultaneous scheduling of machines
and agvs in fms. The International Journal of Ad-
vanced Manufacturing Technology, 31(5-6):602–613.
Sonmez, A. I. and Baykasoglu, A. (1998). A new dynamic
programming formulation of (nm) flow shop sequenc-
ing problems with due dates. International Journal of
Production Research, 36(8):2269–2283.
Storn, R. and Price, K. (1995). Differential evolution: A
simple and efficient adaptive scheme for global op-
timization over continuous spaces. Technical report,
International Computer Science Institute, Berkeley.
Ulusoy, G., Erifolu, F. S., and Bilge, U. (1997). A genetic
algorithm approach to the simultaneous scheduling of
machines and automated guided vehicles. Computers
and Operations Research, 24(3):335–351.
Zhang, Q., Manier, H., and Manier, M. A. (2012). A genetic
algorithm with tabu search procedure for flexible job
shop scheduling with transportation constraints and
bounded processing times. Computers and Opera-
tions Research, 39(7):1713–1723.
Zhang, Q., Manier, H., and Manier, M. A. (2014). A modi-
fied shifting bottleneck heuristic and disjunctive graph
for job shop scheduling problems with transportation
constraints. International Journal of Production Re-
search, 52(4):985–1002.
ICAART 2016 - 8th International Conference on Agents and Artificial Intelligence
62
