
A New Family of Bounded Divergence Measures and Application to
Signal Detection
Shivakumar Jolad
1
, Ahmed Roman
2
, Mahesh C. Shastry
3
, Mihir Gadgil
4
and Ayanendranath Basu
5
1
Department of Physics, Indian Institute of Technology Gandhinagar, Ahmedabad, Gujarat, India
2
Department of Mathematics, Virginia Tech , Blacksburg, VA, U.S.A.
3
Department of Physics, Indian Institute of Science Education and Research Bhopal, Bhopal, Madhya Pradesh, India
4
Biomedical Engineering Department, Oregon Health & Science University, Portland, OR, U.S.A.
5
Interdisciplinary Statistical Research Unit, Indian Statistical Institute, Kolkata, West Bengal-700108, India
Keywords:
Divergence Measures, Bhattacharyya Distance, Error Probability, F-divergence, Pattern Recognition, Signal
Detection, Signal Classification.
Abstract:
We introduce a new one-parameter family of divergence measures, called bounded Bhattacharyya distance
(BBD) measures, for quantifying the dissimilarity between probability distributions. These measures are
bounded, symmetric and positive semi-definite and do not require absolute continuity. In the asymptotic
limit, BBD measure approaches the squared Hellinger distance. A generalized BBD measure for multiple
distributions is also introduced. We prove an extension of a theorem of Bradt and Karlin for BBD relating
Bayes error probability and divergence ranking. We show that BBD belongs to the class of generalized Csiszar
f-divergence and derive some properties such as curvature and relation to Fisher Information. For distributions
with vector valued parameters, the curvature matrix is related to the Fisher-Rao metric. We derive certain
inequalities between BBD and well known measures such as Hellinger and Jensen-Shannon divergence. We
also derive bounds on the Bayesian error probability. We give an application of these measures to the problem
of signal detection where we compare two monochromatic signals buried in white noise and differing in
frequency and amplitude.
1 INTRODUCTION
Divergence measures for the distance between two
probability distributions are a statistical approach to
comparing data and have been extensively studied in
the last six decades (Kullback and Leibler, 1951; Ali
and Silvey, 1966; Kapur, 1984; Kullback, 1968; Ku-
mar et al., 1986). These measures are widely used in
varied fields such as pattern recognition (Basseville,
1989; Ben-Bassat, 1978; Choi and Lee, 2003), speech
recognition (Qiao and Minematsu, 2010; Lee, 1991),
signal detection (Kailath, 1967; Kadota and Shepp,
1967; Poor, 1994), Bayesian model validation (Tumer
and Ghosh, 1996) and quantum information theory
(Nielsen and Chuang, 2000; Lamberti et al., 2008).
Distance measures try to achieve two main objectives
(which are not mutually exclusive): to assess (1) how
“close” two distributions are compared to others and
(2) how “easy” it is to distinguish between one pair
than the other (Ali and Silvey, 1966).
There is a plethora of distance measures available
to assess the convergence (or divergence) of proba-
bility distributions. Many of these measures are not
metrics in the strict mathematical sense, as they may
not satisfy either the symmetry of arguments or the
triangle inequality. In applications, the choice of the
measure depends on the interpretation of the metric in
terms of the problem considered, its analytical prop-
erties and ease of computation (Gibbs and Su, 2002).
One of the most well-known and widely used di-
vergence measures, the Kullback-Leibler divergence
(KLD)(Kullback and Leibler, 1951; Kullback, 1968),
can create problems in specific applications. Specif-
ically, it is unbounded above and requires that the
distributions be absolutely continuous with respect
to each other. Various other information theoretic
measures have been introduced keeping in view ease
of computation ease and utility in problems of sig-
nal selection and pattern recognition. Of these mea-
sures, Bhattacharyya distance (Bhattacharyya, 1946;
Kailath, 1967; Nielsen and Boltz, 2011) and Chernoff
distance (Chernoff, 1952; Basseville, 1989; Nielsen
72
Jolad, S., Roman, A., Shastry, M., Gadgil, M. and Basu, A.
A New Family of Bounded Divergence Measures and Application to Signal Detection.
DOI: 10.5220/0005695200720083
In Proceedings of the 5th International Conference on Pattern Recognition Applications and Methods (ICPRAM 2016), pages 72-83
ISBN: 978-989-758-173-1
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

and Boltz, 2011) have been widely used in signal
processing. However, these measures are again un-
bounded from above. Many bounded divergence mea-
sures such as Variational, Hellinger distance (Bas-
seville, 1989; DasGupta, 2011) and Jensen-Shannon
metric (Burbea and Rao, 1982; Rao, 1982b; Lin,
1991) have been studied extensively. Utility of these
measures vary depending on properties such as tight-
ness of bounds on error probabilities, information the-
oretic interpretations, and the ability to generalize to
multiple probability distributions.
Here we introduce a new one-parameter (α) fam-
ily of bounded measures based on the Bhattacharyya
coefficient, called bounded Bhattacharyya distance
(BBD) measures. These measures are symmetric,
positive-definite and bounded between 0 and 1. In
the asymptotic limit (α →±∞) they approach squared
Hellinger divergence (Hellinger, 1909; Kakutani,
1948). Following Rao (Rao, 1982b) and Lin (Lin,
1991), a generalized BBD is introduced to capture
the divergence (or convergence) between multiple dis-
tributions. We show that BBD measures belong to
the generalized class of f-divergences and inherit use-
ful properties such as curvature and its relation to
Fisher Information. Bayesian inference is useful in
problems where a decision has to be made on clas-
sifying an observation into one of the possible array
of states, whose prior probabilities are known (Hell-
man and Raviv, 1970; Varshney and Varshney, 2008).
Divergence measures are useful in estimating the er-
ror in such classification (Ben-Bassat, 1978; Kailath,
1967; Varshney, 2011). We prove an extension of
the Bradt Karlin theorem for BBD, which proves the
existence of prior probabilities relating Bayes error
probabilities with ranking based on divergence mea-
sure. Bounds on the error probabilities P
e
can be
calculated through BBD measures using certain in-
equalities between Bhattacharyya coefficient and P
e
.
We derive two inequalities for a special case of BBD
(α = 2) with Hellinger and Jensen-Shannon diver-
gences. Our bounded measure with α = 2 has been
used by Sunmola (Sunmola, 2013) to calculate dis-
tance between Dirichlet distributions in the context of
Markov decision process. We illustrate the applicabil-
ity of BBD measures by focusing on signal detection
problem that comes up in areas such as gravitational
wave detection (Finn, 1992). Here we consider dis-
criminating two monochromatic signals, differing in
frequency or amplitude, and corrupted with additive
white noise. We compare the Fisher Information of
the BBD measures with that of KLD and Hellinger
distance for these random processes, and highlight the
regions where FI is insensitive large parameter devia-
tions. We also characterize the performance of BBD
for different signal to noise ratios, providing thresh-
olds for signal separation.
Our paper is organized as follows: Section I is
the current introduction. In Section II, we recall the
well known Kullback-Leibler and Bhattacharyya di-
vergence measures, and then introduce our bounded
Bhattacharyya distance measures. We discuss some
special cases of BBD, in particular Hellinger distance.
We also introduce the generalized BBD for multi-
ple distributions. In Section III, we show the posi-
tive semi-definiteness of BBD measure, applicability
of the Bradt Karl theorem and prove that BBD be-
longs to generalized f-divergence class. We also de-
rive the relation between curvature and Fisher Infor-
mation, discuss the curvature metric and prove some
inequalities with other measures such as Hellinger
and Jensen Shannon divergence for a special case of
BBD. In Section IV, we move on to discuss applica-
tion to signal detection problem. Here we first briefly
describe basic formulation of the problem, and then
move on computing distance between random pro-
cesses and comparing BBD measure with Fisher In-
formation and KLD. In the Appendix we provide the
expressions for BBD measures , with α = 2, for some
commonly used distributions. We conclude the paper
with summary and outlook.
2 DIVERGENCE MEASURES
In the following subsection we consider a measurable
space Ω with σ-algebra B and the set of all probability
measures M on (Ω,B). Let P and Q denote probabil-
ity measures on (Ω,B) with p and q denoting their
densities with respect to a common measure λ. We
recall the definition of absolute continuity (Royden,
1986):
Absolute Continuity: A measure P on the Borel
subsets of the real line is absolutely continuous with
respect to Lebesgue measure Q, if P(A) = 0, for ev-
ery Borel subset A ∈ B for which Q(A) = 0, and is
denoted by P << Q.
2.1 Kullback-Leibler Divergence
The Kullback-Leibler divergence (KLD) (or rela-
tive entropy) (Kullback and Leibler, 1951; Kullback,
1968) between two distributions P,Q with densities p
and q is given by:
I(P, Q) ≡
Z
plog
p
q
dλ. (1)
The symmetrized version is given by
J(P, Q) ≡ (I(P, Q) + I(Q,P))/2
A New Family of Bounded Divergence Measures and Application to Signal Detection
73

(Kailath, 1967), I(P,Q) ∈ [0, ∞]. It diverges if
∃ x
0
: q(x
0
) = 0 and p(x
0
) 6= 0.
KLD is defined only when P is absolutely contin-
uous w.r.t. Q. This feature can be problematic in nu-
merical computations when the measured distribution
has zero values.
2.2 Bhattacharyya Distance
Bhattacharyya distance is a widely used measure
in signal selection and pattern recognition (Kailath,
1967). It is defined as:
B(P, Q) ≡ −ln
Z
√
pqdλ
= −ln(ρ), (2)
where the term in parenthesis ρ(P,Q) ≡
R
√
pqdλ
is called Bhattacharyya coefficient (Bhattacharyya,
1943; Bhattacharyya, 1946) in pattern recognition,
affinity in theoretical statistics, and fidelity in quan-
tum information theory. Unlike in the case of KLD,
the Bhattacharyya distance avoids the requirement of
absolute continuity. It is a special case of Chernoff
distance
C
α
(P, Q) ≡ −ln
Z
p
α
(x)q
1−α
(x)dx
,
with α = 1/2. For discrete probability distribu-
tions, ρ ∈ [0,1] is interpreted as a scalar product of
the probability vectors P = (
√
p
1
,
√
p
2
,. . .,
√
p
n
) and
Q = (
√
q
1
,
√
q
2
,. . .,
√
q
n
). Bhattacharyya distance
is symmetric, positive-semidefinite, and unbounded
(0 ≤ B ≤ ∞). It is finite as long as there exists some
region S ⊂ X such that whenever x ∈S : p(x)q(x) 6= 0.
2.3 Bounded Bhattacharyya Distance
Measures
In many applications, in addition to the desirable
properties of the Bhattacharyya distance, bounded-
ness is required. We propose a new family of bounded
measure of Bhattacharyya distance as below,
B
ψ,b
(P, Q) ≡ −log
b
(ψ(ρ)) (3)
where, ρ = ρ(P, Q) is the Bhattacharyya coefficient,
ψ
b
(ρ) satisfies ψ(0) = b
−1
, ψ(1) = 1. In particular
we choose the following form :
ψ(ρ) =
1 −
(1 −ρ)
α
α
b =
α
α −1
α
, (4)
where α ∈ [−∞,0) ∪(1,∞]. This gives the measure
B
α
(ρ(P, Q)) ≡ −log
(
1−
1
α
)
−α
1 −
(1 −ρ)
α
α
, (5)
which can be simplified to
B
α
(ρ) =
log
h
1 −
(1−ρ)
α
i
log
1 −
1
α
. (6)
It is easy to see that B
α
(0) = 1, B
α
(1) = 0.
2.4 Special Cases
1. For α = 2 we get,
B
2
(ρ) = −log
2
2
1 + ρ
2
2
= −log
2
1 + ρ
2
.
(7)
We study some of its special properties in Sec.3.7.
2. α → ∞
B
∞
(ρ) = −log
e
e
−(1−ρ)
= 1 −ρ = H
2
(ρ), (8)
where H(ρ) is the Hellinger distance (Basseville,
1989; Kailath, 1967; Hellinger, 1909; Kakutani,
1948)
H(ρ) ≡
p
1 −ρ(P,Q). (9)
3. α = −1
B
−1
(ρ) = −log
2
1
2 −ρ
. (10)
4. α → −∞
B
−∞
(ρ) = log
e
e
(1−ρ)
= 1 −ρ = H
2
(ρ). (11)
We note that BBD measures approach squared
Hellinger distance when α → ±∞. In general, they
are convex (concave) when α > 1 (α < 0) in ρ, as
seen by evaluating second derivative
∂
2
B
α
(ρ)
∂ρ
2
=
−1
α
2
log
1 −
1
α
1 −
1−ρ
α
2
=
=
(
> 0 α > 1
< 0 α < 0 .
(12)
From this we deduce B
α>1
(ρ) ≤H
2
(ρ) ≤B
α<0
(ρ) for
ρ ∈ [0,1]. A comparison between Hellinger and BBD
measures for different values of α are shown in Fig.
1.
ICPRAM 2016 - International Conference on Pattern Recognition Applications and Methods
74
0 0.2 0.4 0.6 0.8 1
0
0.2
0.4
0.6
0.8
1
ρ
B
α
(ρ)
α=−10
−1
1.01
2
10
H
2
(ρ)
Figure 1: [Color Online] Comparison of Hellinger and
bounded Bhattacharyya distance measures for different val-
ues of α.
2.5 Generalized BBD Measure
In decision problems involving more than two ran-
dom variables, it is very useful to have divergence
measures involving more than two distributions (Lin,
1991; Rao, 1982a; Rao, 1982b). We use the general-
ized geometric mean (G) concept to define bounded
Bhattacharyya measure for more than two distribu-
tions. The G
β
({p
i
}) of n variables p
1
, p
2
,. . ., p
n
with
weights β
1
,β
2
,. . .,β
n
, such that β
i
≥ 0,
∑
i
β
i
= 1, is
given by
G
β
({p
i
}) =
n
∏
i=1
p
β
i
i
.
For n probability distributions P
1
,P
2
,. . .,P
n
, with
densities p
1
, p
2
,. . ., p
n
, we define a generalized Bhat-
tacharyya coefficient, also called Matusita measure of
affinity (Matusita, 1967; Toussaint, 1974):
ρ
β
(P
1
,P
2
,. . .,P
n
) =
Z
Ω
n
∏
i=1
p
β
i
i
dλ. (13)
where β
i
≥ 0,
∑
i
β
i
= 1. Based on this, we define the
generalized bounded Bhattacharyya measures as:
B
β
α
(ρ
β
(P
1
,P
2
,. . .,P
n
)) ≡
log(1 −
1−ρ
β
α
)
log(1 −1/α)
(14)
where α ∈[−∞,0)∪(1,∞]. For brevity we denote it as
B
β
α
(ρ). Note that, 0 ≤ρ
β
≤1 and 0 ≤B
β
α
(ρ) ≤1, since
the weighted geometric mean is maximized when all
the p
i
’s are the same, and minimized when any two
of the probability densities p
i
’s are perpendicular to
each other.
3 PROPERTIES
3.1 Symmetry, Boundedness and
Positive Semi-definiteness
Theorem 3.1. B
α
(ρ(P, Q)) is symmetric, positive
semi-definite and bounded in the interval [0, 1] for
α ∈ [−∞,0) ∪(1,∞].
Proof. Symmetry: Since ρ(P,Q) = ρ(Q,P), it fol-
lows that
B
α
(ρ(P, Q)) = B
α
(ρ(Q,P)).
Positive-semidefinite and boundedness: Since
B
α
(0) = 1, B
α
(1) = 0 and
∂B
α
(ρ)
∂ρ
=
1
αlog(1 −1/α) [1 −(1 −ρ)/α]
< 0
for 0 ≤ ρ ≤ 1 and α ∈ [−∞, 0) ∪(1, ∞], it follows that
0 ≤ B
α
(ρ) ≤ 1. (15)
3.2 Error Probability and Divergence
Ranking
Here we recap the definition of error probability and
prove the applicability of Bradt and Karlin (Bradt and
Karlin, 1956) theorem to BBD measure.
Error Probability: The optimal Bayes error proba-
bilities (see eg: (Ben-Bassat, 1978; Hellman and Ra-
viv, 1970; Toussaint, 1978)) for classifying two events
P
1
,P
2
with densities p
1
(x) and p
2
(x) with prior prob-
abilities Γ = {π
1
,π
2
} is given by
P
e
=
Z
min[π
1
p
1
(x),π
2
p
2
(x)]dx. (16)
Error Comparison: Let p
β
i
(x) (i = 1,2) be param-
eterized by β (Eg: in case of Normal distribution
β = {µ
1
,σ
1
;µ
2
,σ
2
} ). In signal detection literature,
a signal set β is considered better than set β
0
for the
densities p
i
(x) , when the error probability is less for
β than for β
0
(i.e. P
e
(β) < P
e
(β
0
)) (Kailath, 1967).
Divergence Ranking: We can also rank the param-
eters by means of some divergence D. The signal
set β is better (in the divergence sense) than β
0
, if
D
β
(P
1
,P
2
) > D
β
0
(P
1
,P
2
).
In general it is not true that D
β
(P
1
,P
2
) >
D
β
0
(P
1
,P
2
) =⇒ P
e
(β) < P
e
(β
0
). Bradt and Karlin
proved the following theorem relating error probabil-
ities and divergence ranking for symmetric Kullback
Leibler divergence J:
A New Family of Bounded Divergence Measures and Application to Signal Detection
75

Theorem 3.2 (Bradt and Karlin (Bradt and Karlin,
1956)). If J
β
(P
1
,P
2
) > J
β
0
(P
1
,P
2
), then ∃a set of prior
probabilities Γ = {π
1
,π
2
} for two hypothesis g
1
,g
2
,
for which
P
e
(β,Γ) < P
e
(β
0
,Γ) (17)
where P
e
(β,Γ) is the error probability with parameter
β and prior probability Γ.
It is clear that the theorem asserts existence, but
no method of finding these prior probabilities. Kailath
(Kailath, 1967) proved the applicability of the Bradt
Karlin Theorem for Bhattacharyya distance measure.
We follow the same route and show that the B
α
(ρ)
measure satisfies a similar property using the follow-
ing theorem by Blackwell.
Theorem 3.3 (Blackwell (Blackwell, 1951)).
P
e
(β
0
,Γ) ≤ P
e
(β,Γ) for all prior probabilities Γ if
and only if
E
β
0
[Φ(L
β
0
)|g] ≤ E
β
[Φ(L
β
)|g],
∀ continuous concave functions Φ(L), where
L
β
= p
1
(x,β)/p
2
(x,β) is the likelihood ratio and
E
ω
[Φ(L
ω
)|g] is the expectation of Φ(L
ω
) under the
hypothesis g = P
2
.
Theorem 3.4. If B
α
(ρ(β)) > B
α
(ρ(β
0
)), or equiva-
lently ρ(β) < ρ(β
0
) then ∃ a set of prior probabilities
Γ = {π
1
,π
2
} for two hypothesis g
1
,g
2
, for which
P
e
(β,Γ) < P
e
(β
0
,Γ). (18)
Proof. The proof closely follows Kailath (Kailath,
1967). First note that
√
L is a concave function of
L (likelihood ratio) , and
ρ(β) =
∑
x∈X
p
p
1
(x,β)p
2
(x,β)
=
∑
x∈X
s
p
1
(x,β)
p
2
(x,β)
p
2
(x,β)
= E
β
h
q
L
β
|g
2
i
. (19)
Similarly
ρ(β
0
) = E
β
0
h
q
L
β
0
|g
2
i
(20)
Hence, ρ(β) < ρ(β
0
) ⇒
E
β
h
q
L
β
|g
2
i
< E
β
0
h
q
L
β
0
|g
2
i
. (21)
Suppose assertion of the stated theorem is not true,
then for all Γ, P
e
(β
0
,Γ) ≤ P
e
(β,Γ). Then by Theorem
3.3, E
β
0
[Φ(L
β
0
)|g
2
] ≤E
β
[Φ(L
β
)|g
2
] which contradicts
our result in Eq. 21.
3.3 Bounds on Error Probability
Error probabilities are hard to calculate in general.
Tight bounds on P
e
are often extremely useful in prac-
tice. Kailath (Kailath, 1967) has shown bounds on P
e
in terms of the Bhattacharyya coefficient ρ:
1
2
h
2π
1
−
p
1 −4π
1
π
2
ρ
2
i
≤ P
e
≤
π
1
−
1
2
+
√
π
1
π
2
ρ,
(22)
with π
1
+ π
2
= 1. If the priors are equal π
1
= π
2
=
1
2
,
the expression simplifies to
1
2
1 −
q
1 −ρ
2
≤ P
e
≤
1
2
ρ. (23)
Inverting relation in Eq. 6 for ρ(B
α
), we can get the
bounds in terms of B
α
(ρ) measure. For the equal prior
probabilities case, Bhattacharyya coefficient gives a
tight upper bound for large systems when ρ →0 (zero
overlap) and the observations are independent and
identically distributed. These bounds are also useful
to discriminate between two processes with arbitrar-
ily low error probability (Kailath, 1967). We suppose
that tighter upper bounds on error probability can be
derived through Matusita’s measure of affinity (Bhat-
tacharya and Toussaint, 1982; Toussaint, 1977; Tous-
saint, 1975), but is beyond the scope of present work.
3.4 F-divergence
A class of divergence measures called f-divergences
were introduced by Csiszar (Csiszar, 1967; Csiszar,
1975) and independently by Ali and Silvey (Ali and
Silvey, 1966) (see (Basseville, 1989) for review).
It encompasses many well known divergence mea-
sures including KLD, variational, Bhattacharyya and
Hellinger distance. In this section, we show that
B
α
(ρ) measure for α ∈ (1,∞], belongs to the generic
class of f-divergences defined by Basseville (Bas-
seville, 1989).
F-divergence (Basseville, 1989). Consider a measur-
able space Ω with σ-algebra B. Let λ be a measure on
(Ω,B) such that any probability laws P and Q are ab-
solutely continuous with respect to λ, with densities p
and q. Let f be a continuous convex real function on
R
+
, and g be an increasing function on R. The class
of divergence coefficients between two probabilities:
d(P, Q) = g
Z
Ω
f
p
q
qdλ
(24)
are called the f-divergence measure w.r.t. functions
( f , g) . Here p/q = L is the likelihood ratio. The term
in the parenthesis of g gives the Csiszar’s (Csiszar,
1967; Csiszar, 1975) definition of f-divergence.
ICPRAM 2016 - International Conference on Pattern Recognition Applications and Methods
76

The B
α
(ρ(P, Q)) , for α ∈ (1,∞] measure can be writ-
ten as the following f divergence:
f (x) = −1 +
1 −
√
x
α
, g(F) =
log(−F)
log(1 −1/α)
, (25)
where,
F =
Z
Ω
−1 +
1
α
1 −
r
p
q
qdλ
=
Z
Ω
q
−1 +
1
α
−
1
α
√
pq
dλ
= −1 +
1 −ρ
α
. (26)
and
g(F) =
log(1 −
1−ρ
α
)
log(1 −1/α)
= B
α
(ρ(P, Q)). (27)
3.5 Curvature and Fisher Information
In statistics, the information that an observable ran-
dom variable X carries about an unknown parameter θ
(on which it depends) is given by the Fisher informa-
tion. One of the important properties of f-divergence
of two distributions of the same parametric family
is that their curvature measures the Fisher informa-
tion. Following the approach pioneered by Rao (Rao,
1945), we relate the curvature of BBD measures to
the Fisher information and derive the differential cur-
vature metric. The discussions below closely follow
(DasGupta, 2011).
Definition. Let {f (x|θ); θ ∈ Θ ⊆ R}, be a family of
densities indexed by real parameter θ, with some reg-
ularity conditions ( f (x|θ) is absolutely continuous).
Z
θ
(φ) ≡ B
α
(θ,φ) =
log(1 −
1−ρ(θ,φ)
α
)
log(1 −1/α)
(28)
where ρ(θ,φ) =
R
p
f (x|θ) f (x|φ)dx
Theorem 3.5. Curvature of Z
θ
(φ)|
φ=θ
is the Fisher
information of f (x|θ) up to a multiplicative constant.
Proof. Expand Z
θ
(φ) around theta
Z
θ
(φ) = Z
θ
(θ) + (φ −θ)
dZ
θ
(φ)
dφ
+
(φ −θ)
2
2
d
2
Z
θ
(φ)
dφ
2
+ . . .
(29)
Let us observe some properties of Bhattacharyya co-
efficient : ρ(θ,φ) = ρ(φ,θ), ρ(θ,θ) = 1, and its
derivatives:
∂ρ(θ,φ)
∂φ
φ=θ
=
1
2
∂
∂θ
Z
f (x|θ)dx = 0, (30)
∂
2
ρ(θ,φ)
∂φ
2
φ=θ
= −
1
4
Z
1
f
∂ f
∂θ
2
dx +
1
2
∂
2
∂θ
2
Z
f dx
= −
1
4
Z
f (x|θ)
∂log f (x|θ)
∂θ
2
dx
= −
1
4
I
f
(θ). (31)
where I
f
(θ) is the Fisher Information of distribution
f (x|θ)
I
f
(θ) =
Z
f (x|θ)
∂log f (x|θ)
∂θ
2
dx. (32)
Using the above relationships, we can write down
the terms in the expansion of Eq. 29 Z
θ
(θ) =
0 ,
∂Z
θ
(φ)
∂φ
φ=θ
= 0, and
∂
2
Z
θ
(φ)
∂φ
2
φ=θ
= C(α)I
f
(θ) > 0, (33)
where C(α) =
−1
4αlog(1−1/α)
> 0
The leading term of B
α
(θ,φ) is given by
B
α
(θ,φ) ∼
(φ −θ)
2
2
C(α)I
f
(θ). (34)
3.6 Differential Metrics
Rao (Rao, 1987) generalized the Fisher information
to multivariate densities with vector valued parame-
ters to obtain a “geodesic” distance between two para-
metric distributions P
θ
,P
φ
of the same family. The
Fisher-Rao metric has found applications in many ar-
eas such as image structure and shape analysis (May-
bank, 2004; Peter and Rangarajan, 2006) , quantum
statistical inference (Brody and Hughston, 1998) and
Blackhole thermodynamics (Quevedo, 2008). We de-
rive such a metric for BBD measure using property of
f-divergence.
Let θ,φ ∈ Θ ⊆ R
p
, then using the fact that
∂Z(θ,φ)
∂θ
i
φ=θ
= 0, we can easily show that
dZ
θ
=
p
∑
i, j=1
∂
2
Z
θ
∂θ
i
∂θ
j
dθ
i
dθ
j
+ ··· =
p
∑
i, j=1
g
i j
dθ
i
dθ
j
+ . . . .
(35)
The curvature metric g
i j
can be used to find the
geodesic on the curve η(t), t ∈ [0,1] with
C = η(t) : η(0) = θ η(1) = φ. (36)
Details of the geodesic equation are given in many
standard differential geometry books. In the con-
text of probability distance measures reader is re-
ferred to (see 15.4.2 in A DasGupta (DasGupta, 2011)
A New Family of Bounded Divergence Measures and Application to Signal Detection
77

for details) The curvature metric of all Csiszar f-
divergences are just scalar multiple KLD measure
(DasGupta, 2011; Basseville, 1989) given by:
g
f
i j
(θ) = f
00
(1)g
i j
(θ). (37)
For our BBD measure
f
00
(x) =
−1 +
1 −
√
x
α
00
=
1
4αx
3/2
˜
f
00
(1) = 1/4α. (38)
Apart from the −1/log(1 −
1
α
), this is same as C(α)
in Eq. 34. It follows that the geodesic distance for our
metric is same KLD geodesic distance up to a multi-
plicative factor. KLD geodesic distances are tabulated
in DasGupta (DasGupta, 2011).
3.7 Relation to Other Measures
Here we focus on the special case α = 2, i.e. B
2
(ρ)
Theorem 3.6.
B
2
≤ H
2
≤ log4 B
2
(39)
where 1 and log4 are sharp.
Proof. Sharpest upper bound is achieved via taking
sup
ρ∈[0,1)
H
2
(ρ)
B
2
(ρ)
. Define
g(ρ) ≡
1 −ρ
−log
2
(1 + ρ)/2
. (40)
We note that g(ρ) is continuous and has no singulari-
ties whenever ρ ∈ [0, 1). Hence
g
0
(ρ) =
1−ρ
1+ρ
+ log(
1+ρ
2
)
log
2
ρ+1
2
log2 ≥ 0.
It follows that g(ρ) is non-decreasing and hence
sup
ρ∈[0,1)
g(ρ) = lim
ρ→1
g(ρ) = log(4). Thus
H
2
/B
2
≤ log4. (41)
Combining this with convexity property of B
α
(ρ) for
α > 1, we get
B
2
≤ H
2
≤ log4 B
2
Using the same procedure we can prove a generic ver-
sion of this inequality for α ∈ (1,∞] , given by
B
α
(ρ) ≤ H
2
≤ −αlog
1 −
1
α
B
α
(ρ) (42)
Jensen-Shannon Divergence: The Jensen differ-
ence between two distributions P,Q, with densities
p,q and weights (λ
1
,λ
2
); λ
1
+ λ
2
= 1, is defined as,
J
λ
1
,λ
2
(P,Q) = H
s
(λ
1
p + λ
2
q) −λ
1
H
s
(p) −λ
2
H
s
(q),
(43)
where H
s
is the Shannon entropy. Jensen-Shannon di-
vergence (JSD) (Burbea and Rao, 1982; Rao, 1982b;
Lin, 1991) is based on the Jensen difference and is
given by:
JS(P, Q) =J
1/2,1/2
(P, Q)
=
1
2
Z
h
plog
2p
p + q
+ q log
2q
p + q
i
dλ (44)
The structure and goals of JSD and BBD measures
are similar. The following theorem compares the two
metrics using Jensen’s inequality.
Lemma 3.7 Jensen’s Inequality: For a convex func-
tion ψ, E[ψ(X)] ≥ ψ(E[X]).
Theorem 3.8 (Relation to Jensen-Shannon mea-
sure). JS(P, Q) ≥
2
log2
B
2
(P, Q) −log2
We use the un-symmetrized Jensen-Shannon met-
ric for the proof.
Proof.
JS(P, Q) =
Z
p(x)log
2p(x )
p(x) + q(x)
dx
= −2
Z
p(x)log
p
p(x) + q(x)
p
2p(x )
dx
≥−2
Z
p(x)log
p
p(x) +
p
q(x)
p
2p(x )
dx
(since
√
p + q ≤
√
p +
√
q)
=E
P
"
−2log
p
p(X) +
p
q(X)
p
2p(X )
#
By Jensen’s inequality
E[−log f (X)] ≥ −log E[ f (X)], we have
E
P
"
−2log
p
p(X) +
p
q(X)
p
2p(X )
#
≥
−2 log E
P
"
p
p(X) +
p
q(X)
p
2p(X )
#
.
ICPRAM 2016 - International Conference on Pattern Recognition Applications and Methods
78

Hence,
JS(P, Q) ≥ −2log
Z
p(x)
p
p(x) +
p
q(x)
p
2p(x)
dx
= −2 log
1 +
R
p
p(x)q(x)
2
!
−log 2
= 2
B
2
(p(x ), q(x))
log2
−log 2
=
2
log2
B
2
(P, Q) −log2. (45)
4 APPLICATION TO SIGNAL
DETECTION
Signal detection is a common problem occurring in
many fields such as communication engineering, pat-
tern recognition, and Gravitational wave detection
(Poor, 1994). In this section, we briefly describe the
problem and terminology used in signal detection. We
illustrate though simple cases how divergence mea-
sures, in particular BBD can be used for discrimi-
nating and detecting signals buried in white noise of
correlator receivers (matched filter). For greater de-
tails of the formalism used we refer the reader to
review articles in the context of Gravitational wave
detection by Jaranowski and Kr
´
olak(Jaranowski and
Kr
´
olak, 2007) and Sam Finn (Finn, 1992).
One of the central problem in signal detection is to
detect whether a deterministic signal s(t) is embedded
in an observed data x(t), corrupted by noise n(t). This
can be posed as a hypothesis testing problem where
the null hypothesis is absence of signal and alternative
is its presence. We take the noise to be additive , so
that x(t) = n(t) + s(t). We define the following terms
used in signal detection: Correlation G (also called
matched filter) between x and s, and signal to noise
ratio ρ (Finn, 1992; Budzy
´
nski et al., 2008).
G = (x|s), ρ =
p
(s,s), (46)
where the scalar product (.|.) is defined by
(x|y) := 4ℜ
Z
∞
0
˜x( f ) ˜y
∗
( f )
˜
N( f )
d f . (47)
ℜ denotes the real part of a complex expression, tilde
denotes the Fourier transform and the asterisk * de-
notes complex conjugation.
˜
N is the one-sided spec-
tral density of the noise.
For white noise, the probability densities of G when
respectively signal is present and absent are given by
(Budzy
´
nski et al., 2008)
p
1
(G) =
1
√
2πρ
exp
−
(G −ρ
2
)
2
2ρ
2
, (48)
p
0
(G) =
1
√
2πρ
exp
−
G
2
2ρ
2
(49)
4.1 Distance between Gaussian
Processes
Consider a stationary Gaussian random process X,
which has signals s
1
or s
2
with probability densities
p
1
and p
2
respectively of being present in it. These
densities follow the form Eq. 48 with signal to noise
ratios ρ
2
1
and ρ
2
2
respectively. The probability den-
sity p(X) of Gaussian process can modeled as limit
of multivariate Gaussian distributions. The diver-
gence measures between these processes d(s
1
,s
2
) are
in general functions of the correlator (s
1
−s
2
|s
1
−s
2
)
(Budzy
´
nski et al., 2008). Here we focus on distin-
guishing monochromatic signal s(t) = A cos(ωt + φ)
and filter s
F
(t) = A
F
cos(ω
F
t + φ) (both buried in
noise), separated in frequency or amplitude.
The Kullback-Leibler divergence between the sig-
nal and filter I(s,s
F
) is given by the correlation (s −
s
F
|s −s
F
):
I(s,s
F
) =(s −s
F
|s −s
F
) = (s|s) + (s
F
|s
F
) −2(s|s
F
)
=ρ
2
+ ρ
2
F
−2ρρ
F
[hcos(∆ωt)icos(∆φ)
−hsin(∆ωt)isin(∆φ)], (50)
where hi is the average over observation time [0, T ].
Here we have assumed that noise spectral density
N( f ) = N
0
is constant over the frequencies [ω,ω
F
].
The SNRs are given by
ρ
2
=
A
2
T
N
0
, ρ
2
F
=
A
2
F
T
N
0
. (51)
(for detailed discussions we refer the reader to
Budzynksi et. al (Budzy
´
nski et al., 2008)).
The Bhattacharyya distance between Gaussian
processors with signals of same energy is ( Eq 14 in
(Kailath, 1967)) just a multiple of the KLD B = I/8.
We use this result to extract the Bhattacharyya coeffi-
cient :
ρ(s,s
F
) = exp
−
(s −s
F
|s −s
F
)
8
(52)
4.1.1 Frequency Difference
Let us consider the case when the SNRs of signal and
filter are equal, phase difference is zero, but frequen-
cies differ by ∆ω. The KL divergence is obtained by
A New Family of Bounded Divergence Measures and Application to Signal Detection
79

evaluating the correlator in Eq. 50
I(∆ω) = (s −s
F
|s −s
F
) = 2ρ
2
1 −
sin(∆ωT )
∆ωT
.
(53)
by noting hcos(∆ωt)i =
sin(∆ωT )
∆ωT
and hsin(∆ωt)i =
1−cos(∆ωT )
∆ωT
. Using this, the expression for BBD family
can be written as
B
α
(∆ω) =
log
1 −
1
α
1 −e
−
ρ
2
4
1−
sin(∆ωT )
∆ωT
log
1 −
1
α
.
(54)
As we have seen in section 3.4, both BBD and KLD
belong to the f-divergence family. Their curvature for
distributions belonging to same parametric family is a
constant times the Fisher information (FI) (see Theo-
rem: 3.5). Here we discuss where the BBD and KLD
deviates from FI, when we account for higher terms
in the expansion of these measures.
The Fisher matrix element for frequency g
ω,ω
=
E
h
∂logΛ
∂ω
2
i
= ρ
2
T
2
/3 (Budzy
´
nski et al., 2008),
where Λ is the likelihood ratio. Using the relation for
line element ds
2
=
∑
i, j
g
i j
dθ
i
dθ
j
and noting that only
frequency is varied, we get
ds =
ρT ∆ω
√
3
. (55)
Using the relation between curvature of BBD measure
and Fisher’s Information in Eq.34, we can see that for
low frequency differences the line element varies as:
s
2B
α
(∆ω)
C(α)
∼ ds.
Similarly
√
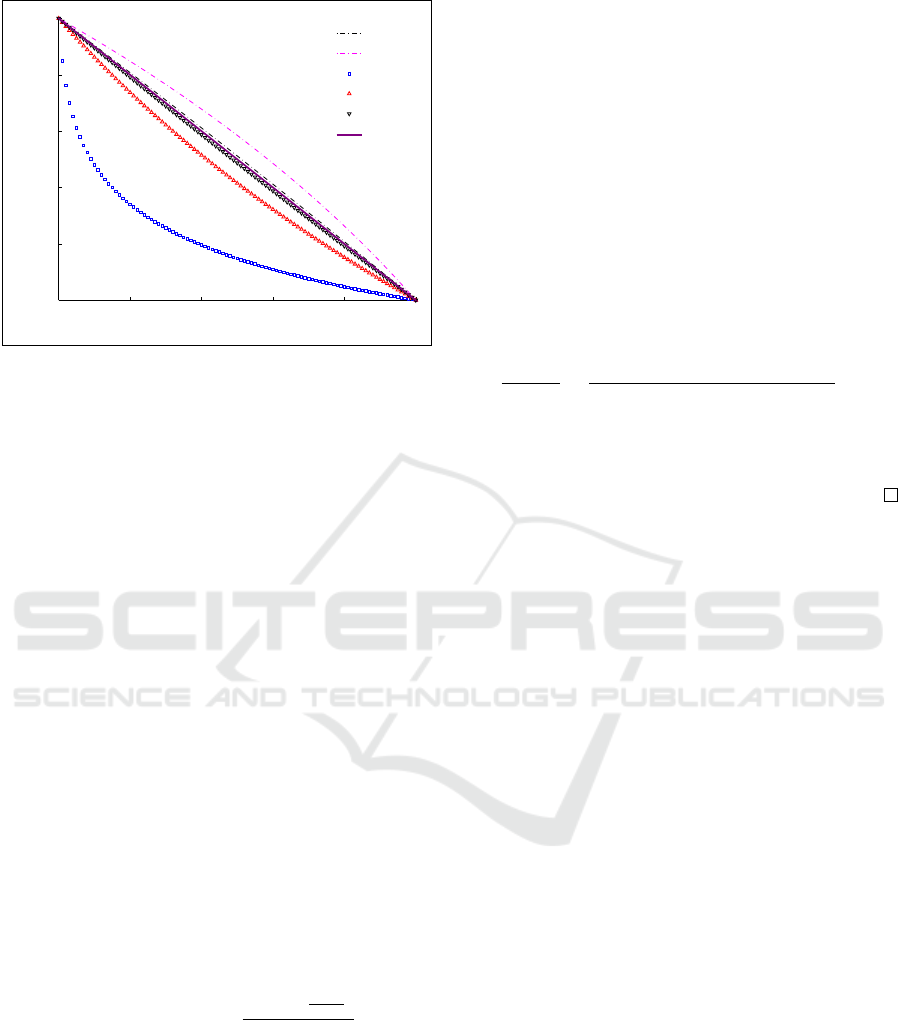
d
KL
∼ ds at low frequencies. However, at
higher frequencies both KLD and BBD deviate from
the Fisher information metric. In Fig. 2, we have plot-
ted ds,
√
d
KL
and
p
2B
α
(∆ω)/C(α) with α = 2 and
Hellinger distance (α → ∞) for ∆ω ∈(0, 0.1). We ob-
serve that till ∆ω = 0.01 (i.e. ∆ωT ∼ 1), KLD and
BBD follows Fisher Information and after that they
start to deviate. This suggests that Fisher Informa-
tion is not sensitive to large deviations. There is not
much difference between KLD, BBD and Hellinger
for large frequencies due to the correlator G becom-
ing essentially a constant over a wide range of fre-
quencies.
4.1.2 Amplitude Difference
We now consider the case where the frequency and
phase of the signal and the filter are same but they dif-
fer in amplitude ∆A (which reflects in differing SNR).
Figure 2: Comparison of Fisher Information, KLD, BBD
and Hellinger distance for two monochromatic signals dif-
fering by frequency ∆ω, buried in white noise. Inset shows
wider range ∆ω ∈ (0, 1) . We have set ρ = 1 and chosen
parameters T = 100 and N
0
= 10
4
.
Figure 3: Comparison of Fisher information line element
with KLD, BBD and Hellinger distance for signals differing
in amplitude and buried in white noise. We have set A = 1,
T = 100 and N
0
= 10
4
.
The correlation reduces to
(s −s
F
|s −s
F
) =
A
2
T
N
0
+
(A + ∆A)
2
T
N
0
−2
A(A + ∆A)T
N
0
=
(∆A)
2
T
N
0
. (56)
This gives us I(∆A) =
(∆A)
2
T
N
0
, which is the same
as the line element ds
2
with Fisher metric ds =
p
T /2N
0
∆A. In Fig. 3, we have plotted ds,
√
d
KL
and
p
2B
α
(∆ω)/C(α) for ∆A ∈ (0,40). KLD and FI
line element are the same. Deviations of BBD and
Hellinger can be observed only for ∆A > 10.
Discriminating between two signals s
1
,s
2
requires
minimizing the error probability between them. By
ICPRAM 2016 - International Conference on Pattern Recognition Applications and Methods
80

Theorem 3.4, there exists priors for which the prob-
lem translates into maximizing the divergence for
BBD measures. For the monochromatic signals dis-
cussed above, the distance depends on parameters
(ρ
1
,ρ
2
,∆ω, ∆φ). We can maximize the distance for a
given frequency difference by differentiating with re-
spect to phase difference ∆φ (Budzy
´
nski et al., 2008).
In Fig. 4, we show the variation of maximized BBD
for different signal to noise ratios (ρ
1
,ρ
2
), for a fixed
frequency difference ∆ω = 0.01. The intensity map
shows different bands which can be used for setting
the threshold for signal separation.
Detecting signal of known form involves minimiz-
ing the distance measure over the parameter space of
the signal. A threshold on the maximum “distance”
between the signal and filter can be put so that a detec-
tion is said to occur whenever the measures fall within
this threshold. Based on a series of tests, Receiver Op-
erating Characteristic (ROC) curves can be drawn to
study the effectiveness of the distance measure in sig-
nal detection. We leave such details for future work.
Figure 4: BBD with different signal to noise ratio for a
fixed. We have set T = 100 and ∆ω = 0.01.
5 SUMMARY AND OUTLOOK
In this work we have introduced a new family of
bounded divergence measures based on the Bhat-
tacharyya distance, called bounded Bhattacharyya
distance measures. We have shown that it belongs
to the class of generalized f-divergences and inher-
its all its properties, such as those relating Fishers In-
formation and curvature metric. We have discussed
several special cases of our measure, in particular
squared Hellinger distance, and studied relation with
other measures such as Jensen-Shannon divergence.
We have also extended the Bradt Karlin theorem on
error probabilities to BBD measure. Tight bounds on
Bayes error probabilities can be put by using proper-
ties of Bhattacharyya coefficient.
Although many bounded divergence measures
have been studied and used in various applications, no
single measure is useful in all types of problems stud-
ied. Here we have illustrated an application to signal
detection problem by considering “distance” between
monochromatic signal and filter buried in white Gaus-
sian noise with differing frequency or amplitude, and
comparing it to Fishers Information and Kullback-
Leibler divergence.
A detailed study with chirp like signal and colored
noise occurring in Gravitational wave detection will
be taken up in a future study. Although our measures
have a tunable parameter α, here we have focused on
a special case with α = 2. In many practical appli-
cations where extremum values are desired such as
minimal error, minimal false acceptance/rejection ra-
tio etc, exploring the BBD measure by varying α may
be desirable. Further, the utility of BBD measures is
to be explored in parameter estimation based on min-
imal disparity estimators and Divergence information
criterion in Bayesian model selection (Basu and Lind-
say, 1994). However, since the focus of the current
paper is introducing a new measure and studying its
basic properties, we leave such applications to statis-
tical inference and data processing to future studies.
ACKNOWLEDGEMENTS
One of us (S.J) thanks Rahul Kulkarni for insightful
discussions, Anand Sengupta for discussions on ap-
plication to signal detection, and acknowledge the fi-
nancial support in part by grants DMR-0705152 and
DMR-1005417 from the US National Science Foun-
dation. M.S. would like to thank the Penn State Elec-
trical Engineering Department for support.
REFERENCES
Ali, S. M. and Silvey, S. D. (1966). A general class of co-
efficients of divergence of one distribution from an-
other. Journal of the Royal Statistical Society. Series
B (Methodological), 28(1):131–142.
Basseville, M. (1989). Distance measures for signal pro-
cessing and pattern recognition. Signal processing,
18:349–369.
Basu, A. and Lindsay, B. G. (1994). Minimum disparity
estimation for continuous models: efficiency, distri-
butions and robustness. Annals of the Institute of Sta-
tistical Mathematics, 46(4):683–705.
Ben-Bassat, M. (1978). f-entropies, probability of er-
A New Family of Bounded Divergence Measures and Application to Signal Detection
81

ror, and feature selection. Information and Control,
39(3):227–242.
Bhattacharya, B. K. and Toussaint, G. T. (1982). An upper
bound on the probability of misclassification in terms
of matusita’s measure of affinity. Annals of the Insti-
tute of Statistical Mathematics, 34(1):161–165.
Bhattacharyya, A. (1943). On a measure of divergence
between two statistical populations defined by their
probability distributions. Bull. Calcutta Math. Soc,
35(99-109):4.
Bhattacharyya, A. (1946). On a measure of divergence be-
tween two multinomial populations. Sankhy
˜
a: The In-
dian Journal of Statistics (1933-1960), 7(4):401–406.
Blackwell, D. (1951). Comparison of experiments. In Sec-
ond Berkeley Symposium on Mathematical Statistics
and Probability, volume 1, pages 93–102.
Bradt, R. and Karlin, S. (1956). On the design and compar-
ison of certain dichotomous experiments. The Annals
of mathematical statistics, pages 390–409.
Brody, D. C. and Hughston, L. P. (1998). Statistical geom-
etry in quantum mechanics. Proceedings of the Royal
Society of London. Series A: Mathematical, Physical
and Engineering Sciences, 454(1977):2445–2475.
Budzy
´
nski, R. J., Kondracki, W., and Kr
´
olak, A. (2008).
Applications of distance between probability distribu-
tions to gravitational wave data analysis. Classical
and Quantum Gravity, 25(1):015005.
Burbea, J. and Rao, C. R. (1982). On the convexity of
some divergence measures based on entropy func-
tions. IEEE Transactions on Information Theory,
28(3):489 – 495.
Chernoff, H. (1952). A measure of asymptotic efficiency for
tests of a hypothesis based on the sum of observations.
The Annals of Mathematical Statistics, 23(4):pp. 493–
507.
Choi, E. and Lee, C. (2003). Feature extraction based
on the Bhattacharyya distance. Pattern Recognition,
36(8):1703–1709.
Csiszar, I. (1967). Information-type distance measures
and indirect observations. Stud. Sci. Math. Hungar,
2:299–318.
Csiszar, I. (1975). I-divergence geometry of probability dis-
tributions and minimization problems. The Annals of
Probability, 3(1):pp. 146–158.
DasGupta, A. (2011). Probability for Statistics and Ma-
chine Learning. Springer Texts in Statistics. Springer
New York.
Finn, L. S. (1992). Detection, measurement, and gravita-
tional radiation. Physical Review D, 46(12):5236.
Gibbs, A. and Su, F. (2002). On choosing and bounding
probability metrics. International Statistical Review,
70(3):419–435.
Hellinger, E. (1909). Neue begr
¨
undung der theo-
rie quadratischer formen von unendlichvielen
ver
¨
anderlichen. Journal f
¨
ur die reine und angewandte
Mathematik (Crelle’s Journal), (136):210–271.
Hellman, M. E. and Raviv, J. (1970). Probability of Error,
Equivocation, and the Chernoff Bound. IEEE Trans-
actions on Information Theory, 16(4):368–372.
Jaranowski, P. and Kr
´
olak, A. (2007). Gravitational-wave
data analysis. formalism and sample applications: the
gaussian case. arXiv preprint arXiv:0711.1115.
Kadota, T. and Shepp, L. (1967). On the best finite set
of linear observables for discriminating two gaussian
signals. IEEE Transactions on Information Theory,
13(2):278–284.
Kailath, T. (1967). The Divergence and Bhattacharyya Dis-
tance Measures in Signal Selection. IEEE Transac-
tions on Communications, 15(1):52–60.
Kakutani, S. (1948). On equivalence of infinite product
measures. The Annals of Mathematics, 49(1):214–
224.
Kapur, J. (1984). A comparative assessment of various mea-
sures of directed divergence. Advances in Manage-
ment Studies, 3(1):1–16.
Kullback, S. (1968). Information theory and statistics. New
York: Dover, 1968, 2nd ed., 1.
Kullback, S. and Leibler, R. A. (1951). On information
and sufficiency. The Annals of Mathematical Statis-
tics, 22(1):pp. 79–86.
Kumar, U., Kumar, V., and Kapur, J. N. (1986). Some
normalized measures of directed divergence. Inter-
national Journal of General Systems, 13(1):5–16.
Lamberti, P. W., Majtey, A. P., Borras, A., Casas, M., and
Plastino, A. (2008). Metric character of the quan-
tum Jensen-Shannon divergence . Physical Review A,
77:052311.
Lee, Y.-T. (1991). Information-theoretic distortion mea-
sures for speech recognition. Signal Processing, IEEE
Transactions on, 39(2):330–335.
Lin, J. (1991). Divergence measures based on the shannon
entropy. IEEE Transactions on Information Theory,
37(1):145 –151.
Matusita, K. (1967). On the notion of affinity of several dis-
tributions and some of its applications. Annals of the
Institute of Statistical Mathematics, 19(1):181–192.
Maybank, S. J. (2004). Detection of image structures using
the fisher information and the rao metric. IEEE Trans-
actions on Pattern Analysis and Machine Intelligence,
26(12):1579–1589.
Nielsen, F. and Boltz, S. (2011). The burbea-rao and bhat-
tacharyya centroids. IEEE Transactions on Informa-
tion Theory, 57(8):5455–5466.
Nielsen, M. and Chuang, I. (2000). Quantum computation
and information. Cambridge University Press, Cam-
bridge, UK, 3(8):9.
Peter, A. and Rangarajan, A. (2006). Shape analysis using
the fisher-rao riemannian metric: Unifying shape rep-
resentation and deformation. In Biomedical Imaging:
Nano to Macro, 2006. 3rd IEEE International Sympo-
sium on, pages 1164–1167. IEEE.
Poor, H. V. (1994). An introduction to signal detection and
estimation. Springer.
Qiao, Y. and Minematsu, N. (2010). A study on in-
variance of-divergence and its application to speech
recognition. Signal Processing, IEEE Transactions
on, 58(7):3884–3890.
Quevedo, H. (2008). Geometrothermodynamics of black
holes. General Relativity and Gravitation, 40(5):971–
984.
ICPRAM 2016 - International Conference on Pattern Recognition Applications and Methods
82

Rao, C. (1982a). Diversity: Its measurement, decomposi-
tion, apportionment and analysis. Sankhya: The In-
dian Journal of Statistics, Series A, pages 1–22.
Rao, C. R. (1945). Information and the accuracy attainable
in the estimation of statistical parameters. Bull. Cal-
cutta Math. Soc., 37:81–91.
Rao, C. R. (1982b). Diversity and dissimilarity coefficients:
A unified approach. Theoretical Population Biology,
21(1):24 – 43.
Rao, C. R. (1987). Differential metrics in probability
spaces. Differential geometry in statistical inference,
10:217–240.
Royden, H. (1986). Real analysis. Macmillan Publishing
Company, New York.
Sunmola, F. T. (2013). Optimising learning with trans-
ferable prior information. PhD thesis, University of
Birmingham.
Toussaint, G. T. (1974). Some properties of matusita’s mea-
sure of affinity of several distributions. Annals of the
Institute of Statistical Mathematics, 26(1):389–394.
Toussaint, G. T. (1975). Sharper lower bounds for discrimi-
nation information in terms of variation (corresp.). In-
formation Theory, IEEE Transactions on, 21(1):99–
100.
Toussaint, G. T. (1977). An upper bound on the probability
of misclassification in terms of the affinity. Proceed-
ings of the IEEE, 65(2):275–276.
Toussaint, G. T. (1978). Probability of error, expected
divergence and the affinity of several distributions.
IEEE Transactions on Systems, Man and Cybernetics,
8(6):482–485.
Tumer, K. and Ghosh, J. (1996). Estimating the Bayes
error rate through classifier combining. Proceedings
of 13th International Conference on Pattern Recogni-
tion, pages 695–699.
Varshney, K. R. (2011). Bayes risk error is a bregman di-
vergence. IEEE Transactions on Signal Processing,
59(9):4470–4472.
Varshney, K. R. and Varshney, L. R. (2008). Quanti-
zation of prior probabilities for hypothesis testing.
IEEE TRANSACTIONS ON SIGNAL PROCESSING,
56(10):4553.
APPENDIX
BBD Measures of Some Common Distributions.
Here we provide explicit expressions for BBD B
2
, for
some common distributions. For brevity we denote
ζ ≡ B
2
.
• Binomial :
P(k) =
n
k
p
k
(1 − p)
n−k
, Q(k) =
n
k
q
k
(1 −q)
n−k
.
ζ
bin
(P,Q) = −log
2
1 + [
√
pq +
p
(1 − p)(1 −q)]
n
2
!
.
(57)
• Poisson :
P(k) =
λ
k
p
e
−λ
p
k!
, Q(k) =
λ
k
q
e
−λ
q
k!
.
ζ
poisson
(P,Q) = −log
2
1 + e
−(
√
λ
p
−
√
λ
q
)
2
/2
2
!
.
(58)
• Gaussian :
P(x) =
1
√
2πσ
p
exp
−
(x −x
p
)
2
2σ
2
p
!
,
Q(x) =
1
√
2πσ
q
exp
−
(x −x
q
)
2
2σ
2
q
!
.
ζ
Gauss
(P,Q) = 1 −log
2
h
1 +
2σ
p
σ
q
σ
2
p
+ σ
2
q
exp
−
(x
p
−x
q
)
2
4(σ
2
p
+ σ
2
q
)
!
i
.
(59)
• Exponential : P(x) = λ
p
e
−λ
p
x
, Q(x) = λ
q
e
−λ
q
x
.
ζ
exp
(P, Q) = −log
2
"
(
p
λ
p
+
p
λ
q
)
2
2(λ
p
+ λ
q
)
#
. (60)
• Pareto : Assuming the same cut off x
m
,
P(x) =
(
α
p
x
α
p
m
x
α
p
+1
for x ≥ x
m
0 for x < x
m
,
(61)
Q(x) =
(
α
q
x
α
q
m
x
α
q
+1
for x ≥ x
m
0 for x < x
m
.
(62)
ζ
pareto
(P, Q) = −log
2
"
(
√
α
p
+
√
α
q
)
2
2(α
p
+ α
q
)
#
. (63)
A New Family of Bounded Divergence Measures and Application to Signal Detection
83
