
A Mutual Influence-based Learning Algorithm
Stefan Rudolph, Sven Tomforde and J
¨
org H
¨
ahner
Organic Computing Group, University of Augsburg, Eichleitnerstr. 30, 86159, Augsburg, Germany
Keywords:
Mutual Influence, Q-Learning, Distributed W-Learning, Smart Cameras, Adaptive Control.
Abstract:
Robust and optimized agent behavior can be achieved by allowing for learning mechanisms within the un-
derlying adaptive control strategies. Therefore, a classic feedback loop concept is used that chooses the best
action for an observed situation – and learns the success by analyzing the achieved performance. This typi-
cally reflects only the local scope of an agent and neglects the existence of other agents with impact on the
reward calculation. However, there are significant mutual influences among agents population. For instance,
the success of a Smart Camera’s control strategy depends (in terms of person detection or 3D-reconstruction)
largely on the current strategy performed by its spatially neighbors. In this paper, we compare two concepts to
consider such influences within the adaptive control strategy: Distributed W-Learning and Q-Learning in com-
bination with mutual influence detection. We demonstrate that the performance can be improved significantly,
if taking detected influences into account.
1 INTRODUCTION
In order to cope with dynamic and potentially un-
known conditions, the control of agent behavior is
typically equipped with learning capabilities. This
has been shown to result in more robust and self-
optimizing behavior (Panait and Luke, 2005). In most
cases, the learning concept relies on a local fitness
measurement. This means that each agent can judge
how good or bad its own performance is by measur-
ing the state of its environment, and without taking
global knowledge into account. The problem with this
concept is that it assumes a direct effect of actions to
performance and neglects significant other influences.
The most important influence might come from other
neighbored agents – measuring the current state of the
environmental conditions might be a result of others’
action.
Consider a Smart Camera (SC) Network (Valera
and Velastin, 2005; Rinner et al., 2008) as exam-
ple: Each SC can adapt its behavior in terms of pan,
tilt, and zoom. The adaptive control mechanism has
to cover different tasks, ranging from person detec-
tion to tracking throughout the network and to 3D-
reconstruction of suspicious persons. Obviously, the
current strategy of its neighbors in close spatial vicin-
ity has significant influence on the success: (a) if it
observes the same area, the person detection is less
successful since one of both SCs does not report a
novel detection event, and (b) if it does not share the
same field of view, a 3D-reconstruction is not possi-
ble.
Within this paper, we discuss our approach to
explicitly detect such mutual influences by identify-
ing correlations between the neighbors’ configuration
and the own performance. This information is then
included in the situation description of the learning
mechanism which is responsible for deciding about
the current configuration. The basic idea is here that
as soon as influences are detected, the system should
be able to learn how to take this information into
account – without manually implementing a counter
strategy.
The remainder of this paper is organized as fol-
lows: Section 2 describes the methodological basis
by explaining our system model, the approach to de-
tect mutual influences among distributed agents, and
a brief introduction of the utilized learning algorithm.
Afterwards, Section 3 evaluates the approach in com-
parison to the state-of-the-art, where influences are
learned implicitly within the learning algorithm. This
is done based on a simulation of a Smart Camera
Network, where mutual influences within the con-
trol strategies can be observed. Section 4 gives an
overview of the state-of-the-art. Finally, Section 5
summarizes the paper and gives an outlook to future
work.
Rudolph, S., Tomforde, S. and Hähner, J.
A Mutual Influence-based Learning Algorithm.
DOI: 10.5220/0005697001810189
In Proceedings of the 8th International Conference on Agents and Artificial Intelligence (ICAART 2016) - Volume 1, pages 181-189
ISBN: 978-989-758-172-4
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
181

2 METHOD
In this section, we introduce the mutual influences de-
tection and how it can be used to design more efficient
learning algorithms. This is structured as follows. In
Section 2.1, we give an introduction to the notion of
mutual influence, and the applied detection method.
Afterwards, Section 2.2 explains how the mutual in-
fluence information can be exploited in a learning al-
gorithm.
2.1 Mutual Influence
As briefly scratched in the previous section, we want
to utilize a mutual influence detection algorithm in or-
der to improve the efficiency of learning algorithms.
In order to define what is meant with this brief de-
scription of mutual influence, this section outlines our
utilized system model which is inspired from stan-
dard machine learning notions. Despite the back-
ground in machine learning, the methodology is as-
sumed to be applicable to all systems covering the ba-
sic system model. Afterwards, we continue this sec-
tion with the presentation of the mutual influence de-
tection algorithm. The method of the measurement
of mutual influences has originally been proposed in
(Rudolph et al., 2015a), therefore, we keep the de-
scription rather short in this work.
2.1.1 System Model
We start with a set of agents {A
1
, . . . , A
n
}, where
each agent can assume different configurations. Such
a configuration typically consists of different parts.
Consider a router as a simple example: The router
can take varying configurations into account, such as
the processed network protocol or parameter settings
(i.e. for time-out intervals, buffer sizes, etc.). We de-
fine the whole configuration space of an agent A
i
as
cartesian product C
i
= c
i1
× ··· × c
im
, where c
i j
are
the parts of the configuration. A further assumption is
that the particular configurations of individual agents
are non-overlapping, meaning each agent has its own
set of configurations, c
i j
6= c
kl
for all defined i 6= k, j, l.
This does not mean that the configuration parts have
to be completely disjoint in structure and values of the
contained variables. For instance, two routers might
have the possibility to configure the time-out interval,
which would lead to the same set of possible config-
urations in these attributes, but on different devices.
Such a relation is explicitly allowed within the model.
Besides the configuration space, we need to consider a
further element: the local performance measurement.
In order to apply the proposed method, each agent has
to estimate the success of its decisions at runtime –
as a response to actions taken before. This is real-
ized based on a feedback mechanism – with feedback
possibly stemming from the environment of the agent
(i.e. direct feedback) or from manual assignments (i.e.
indirect feedback). This resembles the classic rein-
forcement model, where the existence of such a per-
formance measurement (mostly called reward) is one
of the basic assumptions, cf., e.g., (Wiering and van
Otterlo, 2012).
2.1.2 Measurement
Given the described system model, we continue with
the actual methodology for the measurement of mu-
tual influences. The goal is to identify those parts
of the configuration of the neighboring agents that
have influence on the agent itself. Thereby, we focus
on spatially neighbored agents (such as the cameras
in the motivating example) – but the methodology is
not restricted to this kind of neighborhood (i.e., “vir-
tual neighborhoods” are also possible – for instance,
routers in a data communication network). After the
identification of influencing configuration parts, they
can be addressed by a designer or by a self-adapting
system itself.
In general, we are typically not interested in the ques-
tion if an agent as a whole is influencing (some of)
its neighbors, since the benefit of this information is
negligible. In contrast, we want to detect specific
configuration parameters whose optimal usage strat-
egy is somehow influenced by the current settings of
the neighbored agents. The basic idea of the algo-
rithm is to make use of stochastic dependency mea-
sures that estimate associations and relations between
the configuration parts of an agent and the perfor-
mance of a second agent. These dependency mea-
sures are designed to find correlations between two
random variables X and Y . As suggested in (Rudolph
et al., 2015a), we use the Maximal Information Coeffi-
cient (MIC – (Reshef et al., 2011), see next subsection
for details).
If using only dependency measures, the proposed
method does not completely tackle the previously in-
troduced notion of mutual influence. This method
alone has some issues since the configuration of the
agent itself is not taken into account. We explain this
problem and present a solution to resolve this issue in
Section 2.1.4.
2.1.3 Maximal Information Coefficient
The Maximal Information Coefficient (MIC) is a mea-
sure of dependence between two real valued random
variables. It has been introduced by Reshef et al.
(2011) and is based on the Mutual Information that
ICAART 2016 - 8th International Conference on Agents and Artificial Intelligence
182
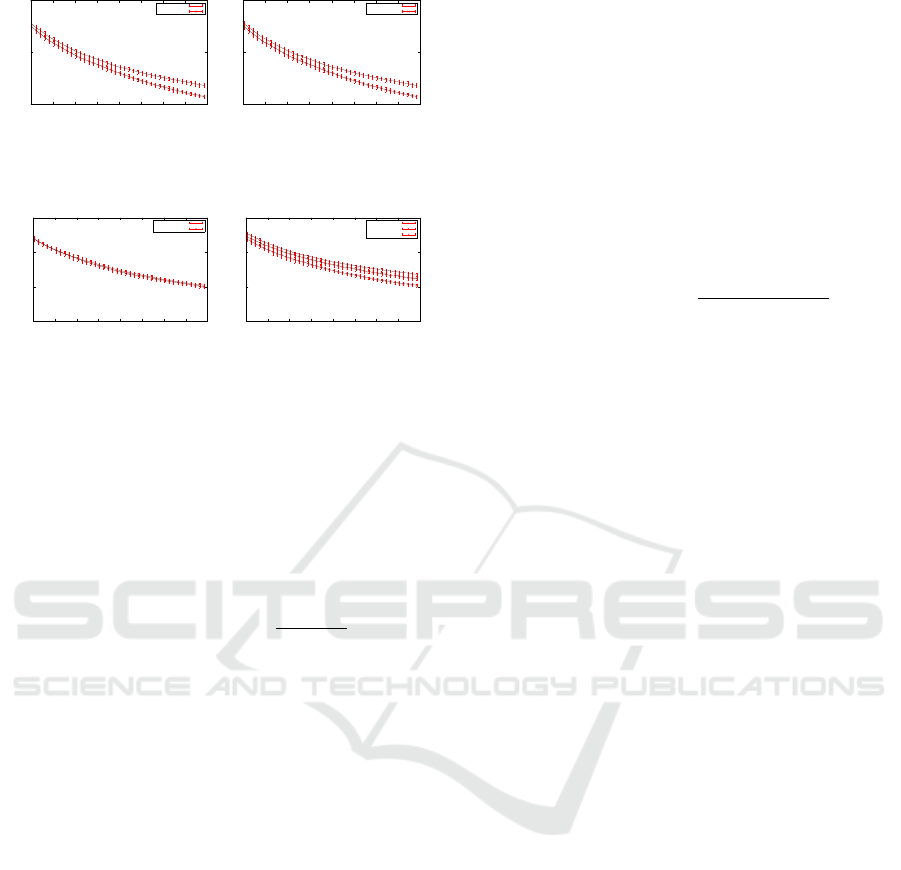
0.125
0.25
0.5
10000 15000 20000 25000 30000 35000 40000 45000 50000
Influence
Steps
Pan Camera 1
Pan Camera 2
(a) The influence of the
pan of Camera 1 and 2 on
Camera 0.
0.125
0.25
0.5
10000 15000 20000 25000 30000 35000 40000 45000 50000
Influence
Steps
Tilt Camera 1
Tilt Camera 2
(b) The influence of the
tilt of Camera 1 and 2 on
Camera 0.
0.0625
0.125
0.25
0.5
10000 15000 20000 25000 30000 35000 40000 45000 50000
Influence
Steps
Zoom Camera 1
Zoom Camera 2
(c) The influence of the
zoom of Camera 1 and 2
on Camera 0.
0.0625
0.125
0.25
0.5
10000 15000 20000 25000 30000 35000 40000 45000 50000
Influence
Steps
Pan Camera 1
Tilt Camera 1
Zoom Camera 1
(d) The influences of the
pan, tilt and zoom of Cam-
era 1 on Cam 0.
Figure 1: The results of the influence measurement based
on 20 independent runs. The graphs show the Influence of
the different configuration parts on Camera 0.
goes back to Shannon and Weaver (1949). Therefore,
we start with a short introduction of the Mutual Infor-
mation and then present the MIC in detail.
The mutual information is defined as:
I(X;Y ) =
∑
x∈X
∑
y∈Y
p(x, y) log
p(x, y)
p(x)p(y)
, (1)
where p(x, y) is the joint probability distribution of
the discrete random variables X and Y variables.
In addition, p(x) and p(y) are the corresponding
marginal distributions. The measure quantifies how
much information about X can be retrieved from the
realization of Y and vice versa. The mutual informa-
tion gives values ≥ 0 and only equals to zero if the two
random variables are stochastically completely inde-
pendent. An important advantage of this technique
compared to other measures, such as, Pearson Corre-
lation Coefficient (Pearson, 1895) or Kendall tau rank
correlation coefficient (Olofsson, 2011), is the pos-
sibility to find non-linear dependencies. Often, the
probability distributions p(x), p(y), and p(x, y) are
unknown and have to be estimated in order to calcu-
late the mutual information. In the discrete case, this
is mostly done with the straight forward method of
counting the frequency of occurrence of the different
events.
An adaption of the mutual information for continuous
has been presented with the MIC. It picks up a pos-
sibility of avoiding the density estimation in the con-
tinuous case. That is the binning of samples, mean-
ing the data is sorted into bins based on their similar-
ity. Afterwards, the probability distributions are esti-
mated for the bins. This again is an easy counting of
frequency and the data is essentially discretized. The
resulting distributions are used for the calculation of
the discrete variant of the mutual information. The
problem is that the manual choice of the bins is time
consuming and can lead to deceptive results if not ap-
propriate. Therefore, MIC has been equipped with a
concept of always using the bins that lead to the max-
imal mutual information. Finding this bin configura-
tion is computational heavy – which resulted in the
utilization of a heuristic to tackle the problem. As a
result, MIC is defined as:
MIC(X ;Y ) = max
n
x
n
y
<B
I(X;Y )
log(min(n
x
, n
y
))
, (2)
where n
x
and n
y
denote the number of bins for X and
Y . The divisor log(min(n
x
, n
y
)) gives the maximal
achievable mutual information given the number of
bins and thus is used as normalizing factor. B typi-
cally denotes a function of the sample size N and lim-
its the number of bins. This is necessary to avoid triv-
ial partitioning, such as creating a single bin for each
data point that most of the time create relatively high
values for the mutual information. The initial paper
introducing MIC proposes to use B = N
0.6
based on
the described experiments.
In general, MIC shows some interesting properties.
Similar to the mutual information, it is defined for val-
ues ≥ 0. In particular, it equals zero only if the ran-
dom variables are completely independent. Further-
more, it is normalized and shows a good equitability
in simulation results, i.e., that different types of asso-
ciation in the data can be compared.
2.1.4 Consideration of Own Configuration
As mentioned before, the use of dependency mea-
sures for the detection of influences is not straight
forward in some cases. The issue appears if the own
configuration of the agent A is essential for the deter-
mination of the influence of an agent B on A. This is if
the configuration of B and the performance of A with-
out taking into account the configuration of A lead to
a distribution that does not indicate a dependency be-
tween them, but, there is an influence of B on A. This
influence can then by revealed by using multiple esti-
mators of the influence for the different configurations
of A. The effect can be observed in already rather sim-
ple examples. One is given with example calculations
of the mutual influence in (Rudolph et al., 2015a). For
the measurement, it is sufficient to use two estimators
and group the samples of all available configurations
to the two estimators. But, sometimes the usage of
more estimator can lead to a faster detection, as shown
in (Rudolph et al., 2015b).
A Mutual Influence-based Learning Algorithm
183

Camera 2
Camera 1
Camera 0
(a) A top view on the
experimental setup
with the pontenially
observable areas of
the cameras. The red
areas show a possible
configuration of the
current field of view.
Camera 1
Camera 0
Camera 2
(b) A 3-dimensional illus-
tration of the experimental
setup. We see agray floor
with orange blocks that rep-
resent targets. The targets
are moving from left to right
and vice versa. The observ-
ing cameras are depicted
with their current field of
view.
Figure 2: The experimental setup.
2.2 The Learning Algorithm
In this section, the reinforcement learning algorithm
is presented. We chose the Q-Learning algorithm
(Watkins and Dayan, 1992) as the basis of this work,
since it is (i) well-known in the reinforcement learn-
ing domain and (ii) it has already been successfully
applied in the Smart Camera domain, cf. (Rudolph
et al., 2014). The algorithm has then been enhanced
using the influence information of the system by
adapting the state space of the learning algorithm in
order to reflect the actual influences in the system.
The remainder of the section gives an introduction to
Q-Learning (see Section 2.2.1) and describes the de-
tails of the modification for application in the Smart
Camera domain.
2.2.1 Q-Learning
The Q-Learning algorithm is a basic Reinforcement
Learning technique that is well known and stud-
ied intensively. It has originally been proposed by
Watkins and Dayan (1992). Like all RL techniques,
Q-learning tries to solve the general RL Problem, i.e.,
to find an optimal policy for a given problem with re-
spect to the long term reward r ∈ R. The main idea
is to find a Quality-function Q : S × A → R that ap-
proximates the reward for each state-action pair and
takes into account the long term reward. To reach this
goal, the value for each state-action-pair is initialized
according to some of the various proposed methods,
e.g., they are all set to a fixed value or they are set to
a random value, and afterwards updated according to
the rule
Q
t+1
(s
t
, a
t
) = Q
t
(s
t
, a
t
)
+ α
r
t+1
+ γmax
a
Q
t
(s
t+1
, a) − Q
t
(s
t
, a
t
)
,
(3)
where Q
t
(s, a) denotes the old Q-Value and Q
t+1
(s, a)
the new one, each for a given state-action pair (s, a).
Furthermore, r
t+1
denotes the reward received in time
step t + 1 and therefore is the immediate reward for
the action a
t
taken in time step t. The discount factor
γ ∈ [0, 1) determines the fraction of estimated future
rewards that is taken into account in the present step.
The learning rate α ∈ (0, 1] determines how much the
current experience, i.e. the current reward, is taken
into account for approximating the Q-value.
2.2.2 Including Mutual Influence Information
After the presentation of the Q-learning algorithm, we
depict how this information can be exploited to create
a MI-based learning algorithm. Although we used Q-
Learning as example for a learning algorithm, other
techniques can be utilized as well.
The main idea is to include the parts of the config-
uration of a neighbor that have an influence on itself
within its own state space. Considering two agents A
1
and A
2
with configuration space C
1
= c
1,1
× c
1,2
and
C
2
= c
2,1
× c
2,2
, where the influence measurement in-
dicates that configuration part c
2,1
has a significant in-
fluence on agent A
1
, we introduce this configuration
part in the state space of it. The agent is then able
to react to the actual configuration of its neighboring
agent.
Looking into a more concrete example, we con-
sider the Smart Camera domain that is also used for
the experiments following later in Section 3. Follow-
ing (Rudolph et al., 2014), a Q-learning algorithm
can be designed by defining the situation and action
parts: (a) the current pan, tilt and zoom configura-
tions are used as situation (i.e., the state space), and
(b) changes to these values (in terms of defined de-
gree steps) serve as action space. More precisely,
the states for each of the cameras can be of the form
[pan
i
,tilt
i
, zoom
i
] and the actions could be the in-
crease of pan, tilt or zoom, or the decease of pan,
tilt or zoom, or no change to pan, tilt or zoom, i.e.,
of the form [X
i,pan
, X
i,tilt
, X
i,zoom
], where X
i,p
could be
increase, decrease or no change. The actual config-
uration space of each camera would then also con-
sist of the [pan, tilt, zoom] configurations. But, the
configuration space and state space are conceptually
ICAART 2016 - 8th International Conference on Agents and Artificial Intelligence
184

different and are not necessarily the same. Assum-
ing that the pan of Camera 1 has a significant in-
fluence on Camera 0, we can apply the above de-
scribed method of the enhancement of the state space
of Camera 1. The new states could then have the
form [pan
1
,tilt
1
, zoom
1
, pan
2
]. This enhancement of
the state space will allow the camera to consider the
configuration of its neighboring camera.
3 EVALUATION
In this section, we present the evaluation of the novel
algorithm. First, we introduce the evaluation setting
that is settled in the Smart Camera domain in Sec-
tion 3.1. Afterwards, we show the results of the mea-
surement of the influence in Section 3.2. Then a learn-
ing algorithm for the comparison of the performance
of the algorithm is introduced in Section 3.3. At least,
we show the results of the mutual influence-based al-
gorithm and the comparison algorithm in Section 3.4.
3.1 Evaluation Setting
For the evaluation, we chose a Smart Camera appli-
cation setting that requires a collaboration in order
to reach an optimal result. Therefore, we define the
goals: (i) detect new targets, and (ii) create 3D mod-
els of targets in an area (i.e., the goal is to provide a
stereo reconstruction of suspicious persons). There is
some research on techniques that allow to construct a
3D model from 2D pictures from different angles, see
(Menze and Muhle, 2012; Menze et al., 2013) for an
example.
The experimental setup is depicted in Figure 2.
There (in particular in Figure 2a), we see a top down
view on three cameras, marked as black dots. Around
them, we see circles in different colors that show the
potential observable areas of the cameras. We can see
that a collaboration between Camera 0 and 1 is neces-
sary for an optimal behavior of the cameras. Camera 2
is not involved with the other two cameras. Therefore,
a collaboration is not helpful. In Figure 2b, we see a
3D model of the scene with example targets added,
represented as orange boxes. In the scenario, the tar-
gets move from left to right and leave the scene or
from right to left and leave the scene.
In the performance measure, we reflect the goals
mentioned before. We rate the detection of a before
unobserved target with a performance of 1 and the ob-
servation of multiple cameras with a performance of
2.5 while one or multiple cameras could observe mul-
tiple targets which are then added up. We chose the
difference between the two possible observations in
order to reflect that a 3D reconstruction of an target is
much more valuable. Experiments with other weight-
ings between the two goals have shown only minor
effects on the mutual influence detection.
3.2 Measurement of Influence
Before the MI-based algorithm can be applied, it is
necessary to gather the MI information for the sce-
nario. The measurement of influence presented here
is based on the results in in (Rudolph et al., 2015a).
However, we present them here again in short since
they are necessary for the understanding of the fol-
lowing results. Exemplary, we show the influence
information for Camera 0. The values for the dif-
ferent parts of the configuration of Camera 1 and 2
are shown in Figure 1a, 1b and 1c. We see that the
pan and tilt of Camera 1 are clearly more influencing
than the counterparts of Camera 2. In Figure 1d, we
can observe the comparison of the three parts of Cam-
era 1. Here, the pan again has the highest measured
influence, followed by the tilt. The influence of the
zoom of Camera 1 is rather marginal, since the aver-
age is higher starting from 10, 000 steps.
3.3 Comparison Algorithm
As basis for a meaningful comparison, we chose the
Distributed W-Learning algorithm (DWL) since it is a
comparatively new reinforcement learning technique
and is especially designed for multi agent systems.
Furthermore, it has already been applied to a similar
learning task in the Smart Camera domain (Rudolph
et al., 2014). It has originally been proposed by
Dusparic and Cahill (2010). It borrows the ideas
of Q-Learning and W-Learning and extends them
with a cooperative mechanism. Since Q-learning has
been outlined in Section 2.2.1, we now introduce W-
Learning (see Section 3.3.1) and on this basis, DWL
is introduced (see Section 3.3.2).
3.3.1 W-Learning
An extension of Q-learning is W-learning. It was
introduced by Humphrys (1995) and addresses the
problem of a too large state space, i.e. there are too
many states to handle in terms of memory, or the
learning will be slowed down too much through the
large number of states that have to be visited in or-
der to learn the optimal policy and therefore makes
the algorithm inapplicable. The proposed solution for
this problem is to split the state space according to
different goals. For every part there is a dedicated
Q-Learner that approximates the value of the state-
A Mutual Influence-based Learning Algorithm
185
action pairs. For the update of the Q-values Equa-
tion 3 is used. In order to decide which W-Learner
is allowed to execute its proposed action, for each W-
Learner a separate W-value is introduced. It is up-
dated using the equation
W
i,t+1
(s
t
) = (1 − α)W
i,t
(s
t
)
+ α
Q
i,t+1
(s
t
, a
t
) − r
i,t+1
+ γmax
a
i
Q
i,t+1
(s
t+1
, a
i
)
,
(4)
where W
i,t
(s) denotes the former mentioned W-value
for W-learner i at time t for state s. The parameters
α and γ are as in the Q-learning update equation (i.e.
Equation 3) the learning rate and the discount factor.
Equally, Q
t
(s, a) is the Q-value at time t for the state-
action pair (s, a). For the selection of the action to
execute the W-learner with the highest W-value has
to be found. The action that has the highest Q-value
within this W-learner is selected and executed.
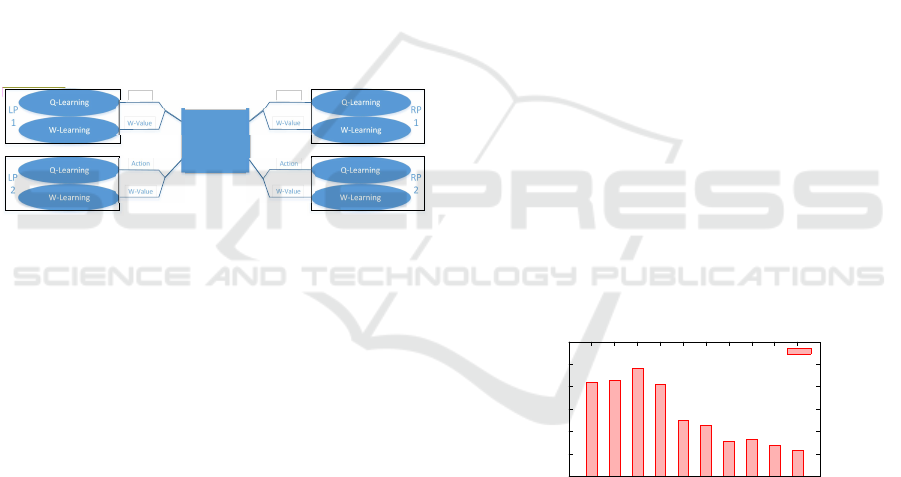
3.3.2 Distributed W-Learning
LP
1
Q‐Learning
W‐Learning
Executeaction
proposedby
highestW‐Value
Action
W‐Value
LP
2
Q‐Learning
W‐Learning
Action
W‐Value
RP
1
Q‐Learning
W‐Learning
Action
W‐Value
RP
2
Q‐Learning
W‐Learning
Action
W‐Value
Figure 3: The Architecture of DWL.
In (Dusparic and Cahill, 2010), Distributed W-
learning (DWL) is introduced. It is an adaption of
the W-learning idea to distributed systems. Since they
often create huge state spaces in most cases, a cen-
tral optimization is not viable. Therefore, DWL in-
troduces a W-learning process for each agent in the
system and enhances it with remote W-learner. The
architecture of the DWL decision process is depicted
in Figure 3. The remote W-learner work similar to the
former introduced W-learners, now denoted as local
W-learner. The difference of the remote W-learner
is that they use the state and reward of the neighbor
agents to determine a proposed action. Through this
mechanism, the neighbors can influence each others
action and are assumed to find an optimal policy for
the whole system. For some applications it might be
useful to not value the opinion of the neighbors as
high as the own. Therefore, to determine the local
W-values, we use the same method as in W-learning,
but, to determine the W-values of the remote poli-
cies a cooperation coefficient 0 ≤ C ≤ 0 is introduced
as a weight. Using a low C leads to a more selfish
behavior. A high value for C lets the agent take its
neighbors suggestions more into account. Other then
stated in (Dusparic and Cahill, 2010), C = 0 does not
lead to a fully non-cooperative behavior, since the W-
values could be (and in practice sometimes are) neg-
ative. Just multiplying the remote W-values by C will
not lead to the desired result. Therefore, in the case
of a negative W-value, we divide by C.
3.4 Results
Here, we present the results of the different algo-
rithms. We start with some information about the re-
sults that apply for all algorithms and then present
the results for DWL in Sec 3.4.1. Then, we show
the performance results of the MI-based algorithm in
Section 3.4.2 and discuss the results in Section 3.4.3.
Since Q-learning introduces two variables, the learn-
ing rate α and the discount factor γ, we would like
to find an optimal parameter set for the task. How-
ever, due to computational reasons it is not possible
to run full parameter studies including the collabora-
tion factor c in DWL. Therefore, we run experiments
with a single camera to find a parameter set for α and
γ that allows an optimal learning behavior. We found
that α = 0.3 and γ = 0.6 fulfills this requirement and
therefore used it for both algorithms, DWL and the
MI-based algorithm.
For each setting, i.e., for DWL each parameter
setting and for the MI-based algorithm each situa-
tion setting, we made 20 independent runs that last
500,000 steps and use the average for the graphs, typ-
ically enhanced with the standard deviation.
3.4.1 DWL
0
20
40
60
80
100
120
0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9
Cooperation Coefficient
Average Performance in last 20000 steps
Figure 4: The results for DWL.
The results using the DWL algorithm are shown in
Figure 4. Each bar shows the average performance of
the last 20,000 steps. We see that a value of 0.2 for the
Collaboration Coefficient C gives the maximum value
of about 96 regarding the performance measure given
in Section 3.1. For the minimum value of 0.0 for C
DWL is equivalent to basic Q-learning and therefore
has no collaboration mechanism any more. It gives a
value of about 83. A collaboration factor of 0.1 and
0.3 also give a viable performance compared to the
maximum value. Looking at a higher values, i.e. 0.4
and higher, we see that the collaboration does have
ICAART 2016 - 8th International Conference on Agents and Artificial Intelligence
186
a negative effect since it rather achieves the perfor-
mance of non-collaborative behaviour, i.e. with C=0.
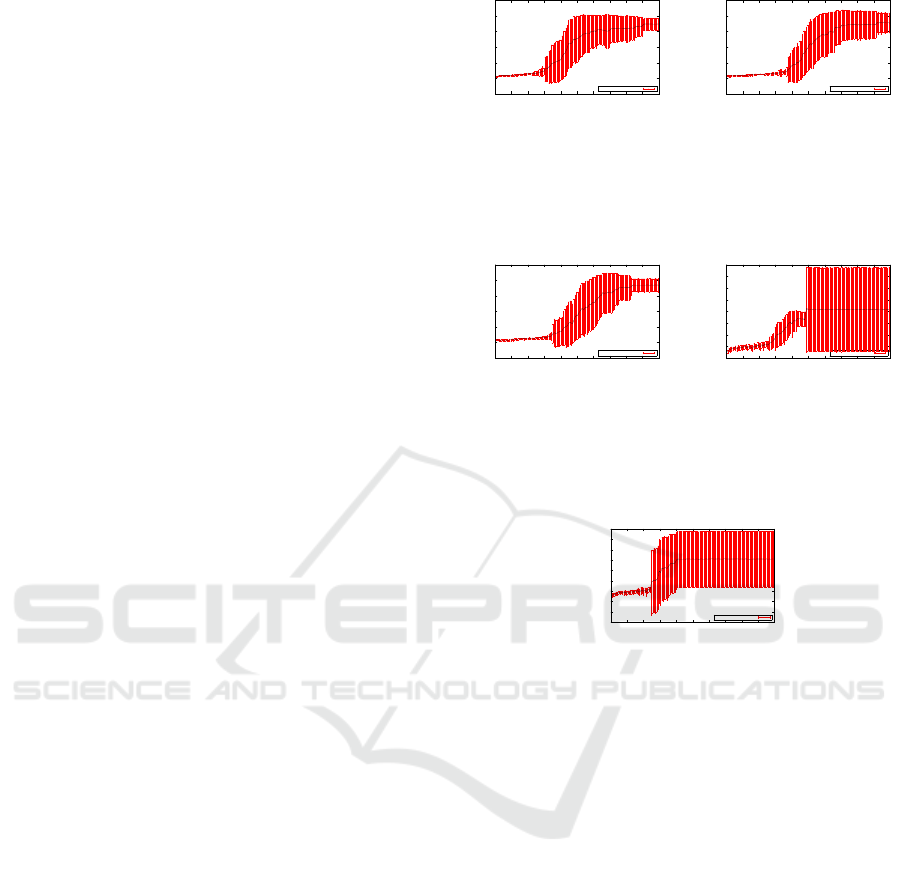
3.4.2 MI-based Algorithm
The results for the MI-based algorithm are presented
in Figure 5. The data is enhanced with the standard
deviation. In Figure 5a, we see the performance of
the Q-Learning algorithm with the states of Camera 0
extended by the pan configuration of Camera 1. We
can observe that a significantly higher performance
as by DWL of approximately 225 is reached meaning
that the introduced collaboration allows the system to
find optimal strategies. Furthermore, the introduction
of the pan is already sufficient to reach this goal. In
Figure 5b and 5c, the graphs are similarly shaped to
the one that only considers the pan. However, the
differences are in the details. If more configuration
parts are introduced in the states of Camera 1, we
see that the performance rises slower in the beginning
(between 150, 000 and 300, 000 steps). But later on
(between 300, 000 and 500, 000) the micro improve-
ments are learned faster if all configuration parts are
included. In Figure 5d, we can observe the results for
the inclusion of the tilt of Camera 1 in the states of
Camera 0 without the consideration of pan. We see
that a near optimal behavior is not found very often,
but at least sometimes. The learning of a near opti-
mal behavior explains the jump in the graph at around
230, 000 steps and consequently a much higher stan-
dard deviation afterwards. However, most runs con-
tinue to process a strategy with a sub-optimal perfor-
mance, resulting in an averaged reward of approxi-
mately 90. In Figure 5e, the runs with only the zoom
of Camera 1 integrated in the states of Camera 0 are
shown, respectively. The results again are far from
optimal, but show that few runs can find a near op-
timal strategy. That again causes the jump at around
120000 steps.
3.4.3 Discussion
The presented results show that the MI-based ap-
proach clearly outperforms all other approaches.
DWL can give better results than a non-collaborative
algorithm for some parameter settings. However, it
is far from an optimal behavior even after a learn-
ing phase of 500,000 steps. Concluding the results
of the MI-based algorithm, we see that the mutual in-
fluence detection method has accurately identified the
most influencing part of the configuration and there-
fore allows to learn optimal behavior. This can be
seen since the runs with the pan included clearly out-
perform DWL and a non-collaborative learning. We
have also seen that the inclusion of the less influenc-
0
50
100
150
200
250
300
0 50000 100000 150000 200000 250000 300000 350000 400000 450000 500000
System Performance
Steps
System Performance
(a) The graphs show the
system perfomance when
the pan angle of Camera 1
is integrated in the state
space of Camera 0.
0
50
100
150
200
250
300
0 50000 100000 150000 200000 250000 300000 350000 400000 450000 500000
System Performance
Steps
System Performance
(b) The graphs show the
system perfomance when
the pan and tilt angle of
Camera 1 is integrated in
the state space of Cam-
era 0.
0
50
100
150
200
250
300
0 50000 100000 150000 200000 250000 300000 350000 400000 450000 500000
System Performance
Steps
System Performance
(c) The graphs show the
system perfomance when
the pan and tilt angle, and
the zoom of Camera 1
is integrated in the state
space of Camera 0.
50
60
70
80
90
100
110
120
130
0 50000 100000 150000 200000 250000 300000 350000 400000 450000 500000
System Performance
Steps
System Performance
(d) The graphs show the
system perfomance when
only the tilt angle of Cam-
era 1 is integrated in the
state space of Camera 0.
30
40
50
60
70
80
90
100
110
120
0 50000 100000 150000 200000 250000 300000 350000 400000 450000 500000
System Performance
Steps
System Performance
(e) The graphs show the
system perfomance when
only the zoom of Camera 1
is integrated in the state
space of Camera 0.
Figure 5: The results for the 3D-reconstruction scenario
using the MI-based algorithm. The graphs show the sys-
tem performance for the three configurations. Each graph
is based on 20 runs with different random seeds. The line
shows the average system performance and the error bars
show the standard deviation.
ing parts (tilt and zoom) does improve the results, too.
But this latter improvement is less strong compared to
the usage of just pan, which has been identified as less
effective by the MI detection method beforehand.
4 RELATED WORK
In literature, several approach that try to formalize
the mutual influences can be found. Most of these
approaches focus on the influence through direct or
indirect interactions. For instance, a model for inter-
actions is proposed by Keil and Goldin (2003), but a
method to detect the implicit interactions is not pro-
vided. Another approach is to use stit logic for model-
A Mutual Influence-based Learning Algorithm
187

ing the interactions in multi agent systems (Broersen,
2010). The focus of this work is on the system spec-
ification and verification and therefore differs much
from the focus of our work. In (Logie et al., 2008), a
data mining approach for the detection of mutual in-
fluences in multi agent systems is proposed. Unfortu-
nately, this is a position paper without concrete meth-
ods and results and no following works have been
published, yet.
The presented method has similarities with the fea-
ture selection approach that originates in supervised
learning and, recently, there are some promising at-
tempts for the adaption to systems with performance
measurement, i.e. the reinforcement learning domain,
such as (Parr et al., 2008; Bishop and Miikkulainen,
2013; Hachiya and Sugiyama, 2010; Nguyen et al.,
2013). All of these works have in common that they
do not match the presented idea of a self-adapting and
self-organizing system. In particular, they do not con-
sider autonomic entities that interact and try to maxi-
mize the system utility based on what they can sense
from their local environment and their local status. In
contrast, they focus on the selection of features from
given input sets for the particular learning algorithms.
Within this work, we focus on the detection of the in-
fluence of the configurations of other system entities.
Furthermore, a variety of contributions can be found
in literature with a focus on multi agent learning
(Stone and Veloso, 2000). These works all belong
to one of two categories: (i) team learning where a
single learner is used for all the agents or (ii) con-
current learner where each agent has an own learner
(Panait and Luke, 2005). In this work, we show how
an optimal learning structure can be found in order
to ensure an optimal learning behavior. We applied
the technique to Q-Learning. However, other learn-
ing techniques, possibly especially designed for multi
agent systems, can benefit from the mutual influence
information as well.
There are several stochastic dependency measures
that could be considered. The probably most promi-
nent instance is the Pearson Correlation Coefficient
(Pearson, 1895). In addition, a variety of further mea-
sures with a similar scope exist. In order to decrease
the number of candidates to be applied for the detec-
tion task, we considered the following list of char-
acteristics that define the requirements for this pur-
pose: (i) The dependency measure should be able
to find nonlinear dependencies between random vari-
ables. (ii) The dependency measure should only be
zero if there is no dependency between the random
variables. (iii) The dependency measure should be
able to handle discrete and continuous random vari-
ables.
The MIC fulfills these criteria most appropriately.
There are also other dependency measures that meet
the criteria, such as, mutual information (Shannon
and Weaver, 1949) or distance covariance (Szkely
et al., 2007). But, some rather famous dependency
measures are excluded by these criteria.
5 CONCLUSION
Based on the observation that an increasing part of
technical systems is characterized by explicit and im-
plicit dependencies among distributed entities, this
paper presented a concept for optimizing the adapta-
tion strategy of an internal control mechanism guiding
the agent’s behavior. The idea is to explicitly identify
correlations between the particular configuration set-
tings of a neighbored entity and the own performance
measurement. We introduced a method to derive such
correlation measures at runtime and integrate the cor-
responding information within the decision logic of
the learning agent. To illustrate the possible impact,
we chose Q-Learning as simple model-free reinforce-
ment technique that is applied to learn a situation-
action mapping online.
To demonstrate the improved performance, we
compared the developed technique with D-Learning,
which is a standard technique that combines Q-
Learning-based online reinforcement learning ap-
proaches with similar learners for neighbor impact.
In contrast to our concept, an integrated technique
is performed. The evaluation showed that our ap-
proach that turns implicit in explicit dependency re-
lations achieves a significant better performance and
illustrated this within simulations of a Smart Camera
scenario.
Future work mainly deals with more sophisticated
solutions regarding the utilization of mutual influence
information. On the one hand, this refers to other and
more complex learning techniques – especially rule-
based learning techniques that have to consider mu-
tual influence estimations within their condition parts.
On the other hand, more sophisticated approaches
with respect to scalability issues are investigated. In
this context, fast pre-estimators that identify reliably
which entity is most probably having influence are de-
veloped.
REFERENCES
Bishop, J. and Miikkulainen, R. (2013). Evolutionary
feature evaluation for online reinforcement learning.
ICAART 2016 - 8th International Conference on Agents and Artificial Intelligence
188

In Computational Intelligence in Games (CIG), 2013
IEEE Conference on, pages 1–8.
Broersen, J. M. (2010). CTL.STIT: enhancing ATL
to express important multi-agent system verification
properties. In 9th International Conference on Au-
tonomous Agents and Multiagent Systems (AAMAS
2010), Toronto, Canada, May 10-14, 2010, Volume 1-
3, pages 683–690.
Dusparic, I. and Cahill, V. (2010). Distributed w-learning:
Multi-policy optimization in self-organizing systems.
In Proceedings of the 3rd IEEE International Con-
ference on Self-Adaptive and Self-Organizing Systems
(SASO). IEEE.
Hachiya, H. and Sugiyama, M. (2010). Feature selection
for reinforcement learning: Evaluating implicit state-
reward dependency via conditional mutual informa-
tion. In Balczar, J. L., Bonchi, F., Gionis, A., and Se-
bag, M., editors, ECML/PKDD (1), volume 6321 of
Lecture Notes in Computer Science, pages 474–489.
Springer.
Humphrys, M. (1995). W-learning: Competition among
selfish q-learners. Technical report.
Keil, D. and Goldin, D. Q. (2003). Modeling indirect
interaction in open computational systems. In 12th
IEEE International Workshops on Enabling Technolo-
gies (WETICE 2003), Infrastructure for Collabora-
tive Enterprises, 9-11 June 2003, Linz, Austria, pages
371–376.
Logie, R., Hall, J. G., and Waugh, K. G. (2008). Towards
mining for influence in a multi agent environment.
In Abraham, A., editor, IADIS European Conf. Data
Mining, pages 97–101. IADIS.
Menze, M., Klinger, T., Muhle, D., Metzler, J., and Heipke,
C. (2013). A stereoscopic approach for the associ-
ation of people tracks in video surveillance systems.
PFG Photogrammetrie, Fernerkundung, Geoinforma-
tion, 2013(2):83–92.
Menze, M. and Muhle, D. (2012). Using Stereo Vision
to Support the Automated Analysis of Surveillance
Videos. ISPRS - International Archives of the Pho-
togrammetry, Remote Sensing and Spatial Informa-
tion Sciences, pages 47–51.
Nguyen, T., Li, Z., Silander, T., and Leong, T. Y. (2013).
Online feature selection for model-based reinforce-
ment learning. In Dasgupta, S. and Mcallester, D., edi-
tors, Proceedings of the 30th International Conference
on Machine Learning (ICML-13), volume 28, pages
498–506. JMLR Workshop and Conference Proceed-
ings.
Olofsson, P. (2011). Probability, Statistics, and Stochastic
Processes. Wiley.
Panait, L. and Luke, S. (2005). Cooperative multi-agent
learning: The state of the art. Autonomous Agents and
Multi-Agent Systems, 11(3):387–434.
Parr, R., Li, L., Taylor, G., Painter-Wakefield, C., and
Littman, M. L. (2008). An analysis of linear models,
linear value-function approximation, and feature se-
lection for reinforcement learning. In Proceedings of
the 25th International Conference on Machine Learn-
ing, ICML ’08, pages 752–759, New York, NY, USA.
ACM.
Pearson, K. (1895). Notes on regression and inheritance
in the case of two parents. Proceedings of the Royal
Society of London, 58(1):240 – 242.
Reshef, D. N., Reshef, Y. A., Finucane, H. K., Grossman,
S. R., McVean, G., Turnbaugh, P. J., Lander, E. S.,
Mitzenmacher, M., and Sabeti, P. C. (2011). De-
tecting novel associations in large data sets. Science,
334(6062):1518–1524.
Rinner, B., Winkler, T., Schriebl, W., Quaritsch, M., and
Wolf, W. (2008). The evolution from single to per-
vasive smart cameras. In Distributed Smart Cameras,
2008. ICDSC 2008. Second ACM/IEEE International
Conference on, pages 1–10.
Rudolph, S., Edenhofer, S., Tomforde, S., and H
¨
ahner, J.
(2014). Reinforcement learning for coverage opti-
mization through ptz camera alignment in highly dy-
namic environments. In Proceedings of the Inter-
national Conference on Distributed Smart Cameras,
ICDSC ’14, pages 19:1–19:6, New York, NY, USA.
ACM.
Rudolph, S., Tomforde, S., Sick, B., and H
¨
ahner, J. (2015a).
A mutual influence detection algorithm for systems
with local performance measurement. In Proceedings
of the 9th IEEE Conference on Self-Adaptive and Self-
Organizing Systems (SASO). IEEE Press, to appear.
Rudolph, S., Tomforde, S., Sick, B., Heck, H., Wacker, A.,
and H
¨
ahner, J. (2015b). An online influence detection
algorithm for organic computing systems. In Proceed-
ings of the 28th GI/ITG International Conference on
Architecture of Computing Systems ARCS Workshops.
Shannon, C. and Weaver, W. (1949). The Mathemati-
cal Theory of Communication. University of Illinois
Press.
Stone, P. and Veloso, M. (2000). Multiagent systems: A sur-
vey from a machine learning perspective. Autonomous
Robots, 8(3):345–383.
Szkely, G. J., Rizzo, M. L., and Bakirov, N. K. (2007). Mea-
suring and testing dependence by correlation of dis-
tances. Ann. Statist., 35(6):2769–2794.
Valera, M. and Velastin, S. (2005). Intelligent distributed
surveillance systems: a review. Vision, Image and Sig-
nal Processing, IEE Proceedings -, 152(2):192–204.
Watkins, C. J. C. H. and Dayan, P. (1992). Technical note
q-learning. Machine Learning, 8:279–292.
Wiering, M. and van Otterlo, M., editors (2012). Reinforce-
ment Learning: State-of-the-Art (Adaptation, Learn-
ing, and Optimization). Springer Verlag, Berlin / Hei-
delberg, Germany. ISBN-13: 978-3642276446.
A Mutual Influence-based Learning Algorithm
189
