
Mean Response-Time Minimization of a Soft-Cascade Detector
Francisco Rodolfo Barbosa-Anda
1,2
, Cyril Briand
1,2
, Fr´ed´eric Lerasle
1,2
and Alhayat Ali Mekonnen
1
1
CNRS, LAAS, 7 avenue du colonel Roche, F-31400 Toulouse, France
2
Univ de Toulouse, UPS, LAAS, F-31400 Toulouse, France
Keywords:
Mathematical Programming, Soft-Cascade, Machine Learning, Object Detection.
Abstract:
In this paper, the problem of minimizing the mean response-time of a soft-cascade detector is addressed. A
soft-cascade detector is a machine learning tool used in applications that need to recognize the presence of
certain types of object instances in images. Classical soft-cascade learning methods select the weak classifiers
that compose the cascade, as well as the classification thresholds applied at each cascade level, so that a desired
detection performance is reached. They usually do not take into account its mean response-time, which is also
of importance in time-constrained applications. To overcome that, we consider the threshold selection problem
aiming to minimize the computation time needed to detect a target object in an image (i.e., by classifying a set
of samples). We prove the NP-hardness of the problem and propose a mathematical model that takes benefit
from several dominance properties, which are put into evidence. On the basis of computational experiments,
we show that we can provide a faster cascade detector, while maintaining the same detection performances.
1 INTRODUCTION
Visual object detection is of utmost importance
in the Computer Vision community with applica-
tions ranging from target tracking in video surveil-
lance (Breitenstein et al., 2011), image indexing and
retrieval (Zhang and Alhajj, 2009), intelligent robotic
systems (Ess et al., 2010), Advanced Driver As-
sistance Systems (ADAS) (Ger´onimo et al., 2010),
etc. Recently, the interest has significantly in-
creased owing to the improvements in computational
resources as attested by the number of published
works, e.g., (Zhang et al., 2013; Doll´ar et al., 2012;
Ger´onimo et al., 2010), proposed challenges, e.g.,
ImageNet (Russakovsky et al., 2015) and the Pascal
Challenge (Everingham et al., 2010), and the dynam-
ics of contributions.
The objective in visual object detection is to detect
and localize the presence and position (with correct
scale) of target objects in the image. The objects can
be anywhere in the image. In the literature, the most
successful visual object detection approach is based
on what is known as a sliding-window technique (Vi-
ola and Jones, 2004). This technique searches for an
object on all possible positions and scales in the image
using a trained classifier – see illustration and 1% of
the total sampled windows in Figure 1. This is and has
been the most successful approach without any prior
(context) information (Doll´ar et al., 2012). Unfortu-
nately, this is computationally demanding and creates
a bottleneck for real-time implementations. Given the
proportion of positive and negative samples in an im-
age, which is typically a staggering one to thousands
(Figure 1), researchers have investigated several clas-
sifier architectures that employ a cascade structure to
discard as much negative samples as early as possible.
This boosts the computation gain as there will be less
samples to test further along the cascade. Examples
include, AdaBoost variants (Doll´ar et al., 2014), ad-
hoc manually constructed cascades (Pan et al., 2013),
and tree ensembles (e.g., Random Forest) (Tang et al.,
2012).
Figure 1: Sliding-window illustration (left) and randomly
sampled 1% of all windows (right) on a 769× 516 sample
image taken from the public INRIA person dataset.
Of all the classifiers, cascade classifiers con-
structed using AdaBoost have received significant at-
tention and have been widely used for several object
detection tasks (Viola and Jones, 2004). AdaBoost
252
Barbosa-Anda, F., Briand, C., Lerasle, F. and Mekonnen, A.
Mean Response-Time Minimization of a Soft-Cascade Detector.
DOI: 10.5220/0005700702520260
In Proceedings of 5th the International Conference on Operations Research and Enterprise Systems (ICORES 2016), pages 252-260
ISBN: 978-989-758-171-7
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

learns a classifier model of an object as a linear sum of
weighted rudimentary weak classifiers in a supervised
manner given labeled positive and negative training
samples. Ideally, each weak classifier, e.g., a deci-
sion tree, is associated with a unique feature, e.g.,
difference of gradient distribution in a specific local
patch within the candidate window (hence, it is com-
mon to find the terms weak classifiers and features
used interchangeably). Usually, several features, thus
weak classifiers, are extracted/trained and AdaBoost
iteratively selects and builds a strong classifier using
only a handful of these weak classifiers. Classically,
AdaBoost has been used in a cascade arrangement
composed of several stages, each stage containing a
single strong classifier trained with AdaBoost (Viola
and Jones, 2004; Zhu et al., 2006). The main inter-
est of the cascade arrangement is to reject as much
of the negative windows as early as possible, thereby
(1) decreasing the computation time, and (2) decreas-
ing the False Positive Rate (FPR). Since each cas-
cade stage aggregates the weighted score of the con-
stituent weak classifiers and thresholds the aggregate
to label each sample as positive (which is passed to
the next level) or as negative (which is rejected), it
is referred as a hard-cascade. Post-training refine-
ments to further tune the performance of the classifier
to meet detection performance requirements are pos-
sible by adjusting the thresholds used at each stage of
the cascade level. Recently, new variants called soft-
cascades have burgeoned (Zhang and Viola, 2008;
Bourdev and Brandt, 2005). The main idea of soft-
cascade is instead of having separated cascade stages,
to have one stage with a single strong classifier and
then to threshold each sample response after each
weighted weak classifier evaluation. These thresholds
are learned after the complete training of the strong
classifier in a kind of calibration phase. In both cases,
AdaBoost trains a classifier solely to fulfill detection
performance requirements without any computation
time consideration. However, in real-time systems us-
ing a sliding window detection approach, it is imper-
ative to consider computation time aspects explicitly.
Computation time of a cascade classifier can be
predominantly decreased in two ways: (1) By using
a feature selection mechanism with computation time
consideration so that cheap features are used in the
initial stages of the cascade and costly, but more dis-
criminatory, ones at later stages; for example, the Bi-
nary Integer Programming (BIP) based feature selec-
tion framework proposed in (Mekonnen et al., 2014)
and the ad-hoc weighted computation time based fea-
ture selection approach in (Jourdheuil et al., 2012).
And, (2) by maximizing cascade stage rejection ra-
tios, in which the rejection thresholds on each cas-
cade stage are set to reject as much negative win-
dows as early as possible, notably the soft-cascade
paradigm proposed in (Zhang and Viola, 2008; Bour-
dev and Brandt, 2005). The first approach is suitable
when considering different classes of features with
varying computation time and detection performance,
whereas the later is suitable for similar classes of fea-
tures having the same computation time but different
detection performance. The work presented in this pa-
per makes its contributions in the vein of the second
approach.
As highlighted, soft-cascades use classical Ad-
aBoost and adjust the rejection thresholds post-facto
(after the classifier is trained) to improve the overall
computation time without (possible) loss of detection
performance. In line with this, in this paper, we pro-
pose a novel optimization framework based on Binary
Integer Programming (BIP) to determine optimal re-
jection threshold values for a trained AdaBoost classi-
fier that minimizes the overall computation time with-
out worsening its detection performance. The pro-
posed framework achieves as much as a 22% relative
computation time gain over (Zhang and Viola, 2008)
under the same TPR conditions with a pedestrian de-
tector trained on the INRIA person dataset (Dalal and
Triggs, 2005)
1
. Eventually, this work makes three
important contributions: (1) it proves that learning a
soft-cascade explicitly minimizing the incurred com-
putation time is NP-hard; (2) it proposes a novel BIP
based optimization framework for solving this prob-
lem; and (3) it demonstrates experimentally and com-
paratively the viability of the framework on a relevant
application, namely pedestrian detection, using pub-
licly available real life dataset.
The rest of this paper is structured as follows: sec-
tion 2 briefly presents the AdaBoost classifier and no-
tions of soft-cascade; then, the problem of mean re-
sponse time minimization is highlighted in section 3
and its complexity is studied. Section 4 focuses on
problem modeling and linear programming formula-
tions. Relevant experimental evaluations, results, and
associated discussions are detailed in section 5. Fi-
nally, concluding remarks are provided in section 6.
2 ADABOOST AND
SOFT-CASCADE
This work deals with the construction of a cascade
classifier used in object detection applications. This
section provides a brief overview of discrete Ad-
aBoost and soft-cascade. The presentation on soft-
1
http://pascal.inrialpes.fr/data/human/
Mean Response-Time Minimization of a Soft-Cascade Detector
253

cascade focuses on the Direct Backward Pruning
(DBP) algorithm (Zhang and Viola, 2008), which is
the most prevalent technique used to learn one.
Discrete AdaBoost, one instance of the Boost-
ing classifier variants, builds a strong classifier as
a linear combination (weighted voting) of a set of
weak classifiers. Suppose we have a labeled train-
ing set {(x
n
,y
n
)}
{n = 1, ..., N}
where x
n
∈ X, y
n
∈
Y = {0,1}, and N denotes the number of training
samples. Given a set of weak classifiers (features)
F = {h
l
}
{
l=1,...,|F |}
, where |F | denotes the total num-
ber of weak classifiers that can assign a given ex-
ample a corresponding label, i.e., h : x → y, discrete
Adaboost constructs a strong classifier of the form
H (x) =
∑
L
l=1
α
l
h
l
(x), with sign(H (x) − θ
L
) deter-
mining the class label. θ
L
is a threshold value tuned
to set the classifier’s operating point (TPR and FPR).
The l indexes connote the sequence of the weak clas-
sifiers and this specific classifier has a total of L se-
lected weak classifiers. The specific weak classifier to
use at each iteration of this boosting algorithm, h
l
, and
the associated weighting coefficients, α
l
, are derived
minimizing the exponential loss, which provides an
upper bound on the actual 1/0 loss (Schapire, 2003).
As previously mentioned, instead of directly us-
ing the AdaBoost trained strong classifier, a set of
rejection threshold values are learned to threshold
each sample response after each weighted classifier
evaluation. The strong classifier along with the re-
jection thresholds form a soft-cascade. The most
widely used algorithm to learn the rejection thresh-
olds is the Direct Backward Pruning (DBP) algo-
rithm (Zhang and Viola, 2008). Considering the cu-
mulative score of a sample x
n
at the l
th
weak classifier
as S
n,l
=
∑
l
u=1
α
u
h
n,u
(where h
n,u
:= h
u
(x
n
)), DBP sets
the threshold θ
l
according to Equation (1) – i.e., to the
minimum score S
n,l
registered by any of the positive
samples that have a final score S
n,L
above the final
threshold θ
L
.
θ
l
= min
{n|S
n,L
>θ
L
,y
n
=1}
S
n,l
(1)
Although this framework has been successfully
used in several detection applications, e.g., (Zhang
and Viola, 2008; Doll´ar et al., 2012), it is not optimal
in terms of minimizing incurred computation time.
Hence, we propose a novel soft-cascade construc-
tion algorithm based on BIP dubbed Mean-Cascade
Response-time Minimization Problem (MSCRMP)
and show it leads to a faster cascade over DBP under
the same TPR conditions. In the following sections,
the proposed MSCRMP algorithm is extensively pre-
sented and demonstrated via a people detection appli-
cation using realistic public dataset.
3 MEAN RESPONSE TIME
MINIMIZATION
3.1 Problem Statement
This section defines more formally the MSCRMP,
which is studied in this paper. It involves a trained
cascade having L weak classifiers with a training set
composed of N samples, partitioned into J positive
and K negative samples (i.e., N = J ∪ K). The no-
tations n, j and k will be further used for designat-
ing a sample (either positive or negative), a positive
one and a negative one, respectively. The weak clas-
sifier located at level l has a positive cost c
l
, which
corresponds to the computation time needed to ana-
lyze one single sample. It also has a positive weight
α
l
, which reflects its importance in the cascade. We
refer to S
n,l
=
∑
l
u=1
α
u
h
n,u
as the score of sample n
at level l where h
n,l
is the known weak-classifier re-
sponse, which equals 1 when the weak classifier sees
n as positive.
The MSCRMP aims at determining, at each level
l, a threshold θ
l
such that if S
n,l
< θ
l
then the sam-
ple n will be rejected from the cascade at level l (it
will not pass through the next cascade levels u > l).
Conversely, if S
n,l
≥ θ
l
) then n will pursue to the next
level l + 1. Obviously, when a sample is rejected at
level l, a computational time saving is obtained that
equals
∑
L
u=l+1
c
u
.
Provided that a minimum number TP of positive
samples should have never been rejected at any cas-
cade level, the objective is to find a threshold vector
Θ = {θ
1
,..., θ
L
} that minimizes the total computation
time (or equivalently, that maximizes the total saved
computation time). Note that, while this objective
only considers the training set, this one is supposed to
be statistically representative of any other sample set,
as commonly assumed in machine learning. There-
fore the minimization of the total computation time
(for the training set) can be viewed as equivalent to
the minimization of the mean response time (for any
unknown sample set).
In the particular case where α
l
= 1 ∀l, consider-
ing a five-levels cascade (L = 5), the diagram pro-
vided in Figure 2 illustrates the evolution of the score
of six samples (positives ones are drawn in blue cir-
cles, negatives in red squares). The scores, which
take their value in the discrete set {0, 1,2,3,4} in
this example, are displayed on the vertical axis. For
this particular problem instance, if one assumes a de-
sired minimum true-positive rate TPR = 50%, only
two possible threshold vectors Θ will be feasible:
Θ
a
= {1, 1,1,2,3} and Θ
b
= {0,1,2, 3,4}. Assum-
ing c
l
= 1 ∀l, the use of Θ
a
gives a total computation
ICORES 2016 - 5th International Conference on Operations Research and Enterprise Systems
254

0
1 2
3
4
5
1
2
3
4
Weak Classifier
Score (S
n,l
)
Positive Sample
Negative Sample
1
2
3
4
5
6
1
2
3
4
5
6
1
2
3
4
5
6
1
2
3
4
5
6
1
2
3
4
5
6
1
2
3
4
5
6
Figure 2: Example with 5 weak classifiers, all cost c
l
= 1,
all weight α
l
= 1, 2 positive samples and 4 negative sam-
ples.
time equals to 6 + 4+ 4 + 4 + 4 = 22, while the one
associated with Θ
b
is 6+ 6+ 5+ 1+1= 19, which is
optimal.
Let us recall that the performance of a soft cas-
cade is not only characterized by the true-positive rate
TPR but also by the false-positive rate FPR, which
gives the percentage of negativesample neverrejected
at any cascade level. Obviously, this rate should be
as low as possible and negative samples should be
rejected the earliest as possible as in practical life
|J| << |K|. Consequently, as soon as the decision
of rejection of a positive sample j having score S
j,l
is
made at one level l, one should also reject at level l
any negative sample k having a score S
k,l
≤ S
j,l
. In
other words, the FPR can be seen as the consequence
of the chosen feasible threshold vector Θ. Moreover,
minimizing the total computation time naturally tends
to minimize the FPR. Coming back to our previous
example, Θ
a
conserves one false positive, while the
optimal Θ
b
threshold vector eliminates all of them.
3.2 Problem Complexity
We prove the following proposition.
Theorem 3.1. MSCRMP is NP-hard.
Proof. The proof is based on a reduction from Subset-
Sum Problem (SSP). An instance of SSP is a pair
(Σ,t), where Σ = {σ
1
,..., σ
R
} is a set of R pos-
itive integers and t (the target) is a positive inte-
ger. The decision problem consists in determining
whether there exists a subset σ
∗
of Σ whose sum
equals t. SSP is known to be NP-complete in the or-
dinary sense (Garey and Johnson, 1979).
First, for any MSCRMP, it is obvious that given a
threshold vector Θ, one can check in polynomial time
whether it is feasible and determine the resulting total
computation time. So MSCRMP is in NP. Consider-
ing now any SSP instance, we build up a MSCRMP
as follows. The soft-cascade is composed of L = 2R
levels. We set α
2u
= α
2u−1
= 1 (the scores are inte-
ger) and TP = |J| −t. The costs are such that c
L
= 1
and c
l
= 0 ∀l < L. The set J is partitioned into R sub-
sets (i.e., J = {J
1
,..., J
R
}) such that: i) |J
i
| = σ
i
and
ii) the score of a sample j ∈ J
i
equals l ÷ 2− 1 when
l = 2i− 1 and l ÷ 2 at any other level, ∀l = 1,...,2R.
Under those assumptions, let us make a few ob-
servations. First, at an even cascade level l = 2i, all
the samples have the same score value i, while for an
odd level l = 2i− 1, only the samples belonging to J
i
have score i − 1 (i for all the other samples). More-
over, as TP = |J| − t, any feasible threshold vector
can never reject any sample at an even level, as it will
discard the whole set J. Additionally, there are only
two possible decisions at an odd level l = 2i− 1: ei-
ther θ
l
> i− 1 and the set J
i
is rejected, or θ
l
≤ i− 1
and all remaining samples are conserved. Last, if J
i
is rejected at level l = 2i − 1, the time saving will
equal |J
i
|
∑
L
u=l+1
c
u
= σ
i
. As the total saving has to
be maximized, the reduced MSCRMP aims at maxi-
mizing the total number of positive samples rejected,
provided it remains not larger than t. We prove be-
low that there exists a threshold vector Θ
∗
for this
MSCRMP-instance if and only if the SSP instance is
a YES-instance.
(⇐) Let us consider a feasible solution Σ
A
⊆ Σ of
an SSP instance such that
∑
σ
i
∈Σ
A
σ
i
= t. Clearly, in
the corresponding reduced MSCRMP instance, if we
consider a threshold vector Θ
A
such that i) θ
A
2i−1
=
θ
A
2i
= i when σ
i
∈ Σ
A
and ii) θ
A
2i−1
= θ
A
2i
= i − 1
when σ
i
/∈ Σ
A
, then only the positive samples in the
set ∪
i|σ
i
∈Σ
∗
J
i
will be rejected, which exactly has t
members. Consequently, Θ
A
is a feasible and opti-
mal solution of the MSCRMP-instance. (⇒) Now,
consider an optimal (feasible) solution Θ
∗
of one re-
duced MSCRMP and a solution Σ
∗
of the initial SSP
instance such that σ
i
∈ Σ
∗
if and only if J
i
is rejected
(i.e., θ
∗
2i−1
< i − 1). If the total number z
∗
of posi-
tive samples rejected equals t then Σ
∗
will obviously
be feasible for the initial SSP, which means it is a
YES-instance. Conversely, if the number z
∗
of pos-
itive samples rejected is strictly lower than t then Σ
∗
will obviously not be feasible for SSP. Moreover, as
the number of positive samples is maximized, there
is no way for increasing z
∗
while preserving the true
positive rate TP = |J| −t, which means that the initial
SSP is a NO-instance.
Mean Response-Time Minimization of a Soft-Cascade Detector
255
4 PROBLEM MODELING
4.1 Sample Rejection Based Model
First let us state the following property.
Proposition 4.1. The solution set of any MSCRMP
instance can be restricted to threshold vectors Θ such
that i) at any level l, ∃n : θ
l
= S
n,l
and ii) θ
l
≤ θ
l+1
.
Proof. Assume there exists a level l that does not re-
spect the property i). Now let consider a sample n
reaching level l and having the lowest score, pro-
vided that θ
l
< S
n,l
. It is obvious that θ
l
can be in-
creased up to S
n,l
without any modification of the re-
jected samples. Moreover, if property ii) is not met
(i.e., θ
l+1
< θ
l
), then θ
l+1
can be increased up to θ
l
still without any consequence on the rejected sam-
ples.
From that straightforward property, one can issue
a Binary Integer Program (BIP), which does not make
use of any θ
l
variables in its formulation. The bi-
nary variables x
n,l
that equal 1 if θ
l
> S
n,l
for the
first time are introduced. The objective function (2)
maximizes the compute time saving, which is linearly
expressed as a function of the x
n,l
variables. Con-
straints of type (3) enforce a sample to be rejected
only once. The desired TPR is obtained thanks to
constraint (4). Eventually, constraints (5) describe the
relationships between samples and scores: it states
that whenever x
n,l
= 1, all samples having a score
lower or equal to S
n,l
at level l should have been re-
jected at a level u ≤ l. From an optimal solution, the
vector of thresholds Θ can be easily computed by set-
ting θ
l
= min
n∈N:
∑
l
u=1
x
n,u
=0
S
n,l
∀l.
First BIP Formulation (BIP1)
Maximize
L
∑
l=1
N
∑
n=1
"
x
n,l
L
∑
u=l+1
c
u
!#
(2)
Subject to
L
∑
l=1
x
n,l
≤ 1 ∀n (3)
|J| −
L
∑
l=1
∑
n∈J
x
n,l
≥ TP (4)
x
n,l
≤
l
∑
u=1
x
v,u
∀(n,l) and∀v|S
v,l
≤ S
n,l
(5)
x
n,l
∈ {0,1} ∀(n,l) (6)
Let us highlight that the set of constraints of type
(5) being quite large, only small problem instances
can be solved. In the next section, another MILP for-
mulation is proposed that outperformsthis one both in
terms of computation time and instance-size capacity.
4.2 Threshold Space Analysis
From the analysis of the weight α
l
of each weak clas-
sifier, a score tree with 2
L
nodes can be constructed
such that any node (l,s) corresponds to one combina-
tion of weights and has two adjacent nodes (l + 1,s)
and (l + 1,s + α
l+1
). An example of such a tree is
given in Figure 3. The instance is a soft-cascade
with four weak classifiers trained by AdaBoost having
weights α = {2.8498,4.3778,3.9534,4.6368}. Any
path from node (0, 0) to a node of level L corre-
sponds to a possible score evolution of one sample.
Of course, given a sample set, any score evolution
is not possible and for the case depicted in Figure 3,
score-classes containing no samples are represented
in white (the others being darkened). We further refer
to C
(l,s)
as the set of samples n such that S
n,l
= s.
4,03,0
4,2.85
4,3.95
2,0
4,4.37
4,4.64
3,2.85
3,3.95
1,0
3,4.37
4,6.8
2,2.85
4,7.23
4,7.49
0,0
4,8.33
4,8.59
2,4.37
4,9.02
3,6.8
1,2.85
3,7.23
3,8.33
4,11.18
4,11.44
2,7.23
4,11.87
4,12.97
3,11.18
4,15.82
Figure 3: A score tree.
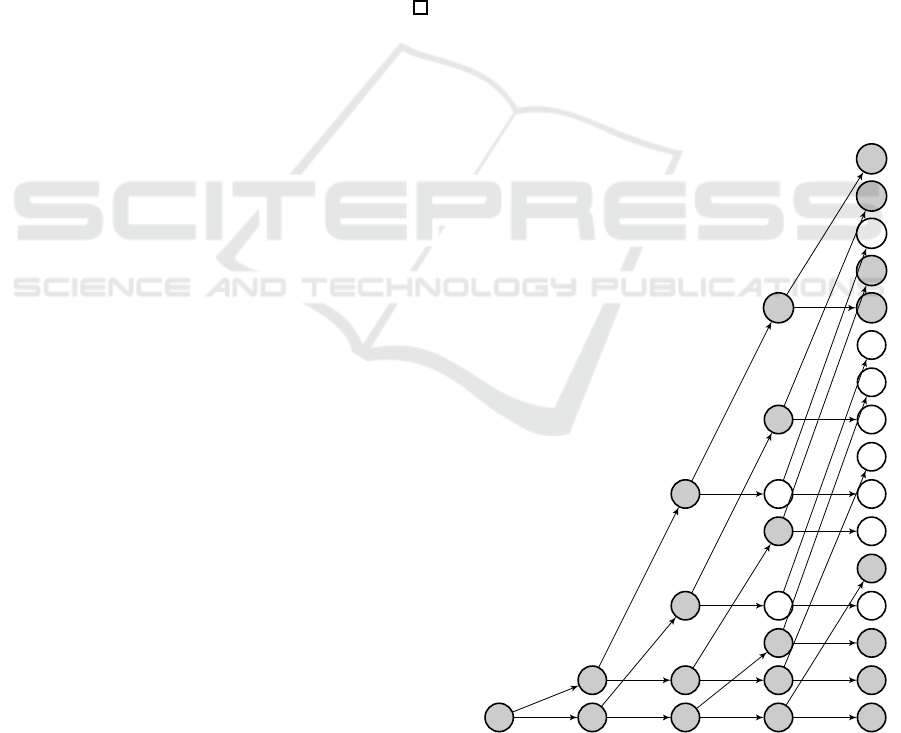
From such a score tree, a threshold tree T (V,E)
can be constructed in its turn having the same set V
of nodes than the score tree and such that any node
ICORES 2016 - 5th International Conference on Operations Research and Enterprise Systems
256

(l, s) ∈ V of level l is connected by an arc e ∈ E to a
node (l + 1,s
′
) ∈ V if and only if s
′
≥ s, as illustrated
in Figure 4 for the example of Figure 3. According to
Proposition 4.1), any solution of the MSCRMP (i.e.,
any threshold vector Θ) corresponds to a specific path
from node (0,0) to a node of level L in T such that,
if node (l, s) is traversed then θ
l
= s. The number of
different paths is clearly exponential. Anyway it is
possible to drastically prune this path number using
the following dominance property.
4,03,0
4,2.85
4,3.95
2,0
4,4.37
4,4.64
3,2.85
3,3.95
1,0
3,4.37
4,6.8
2,2.85
4,7.23
4,7.49
0,0
4,8.33
4,8.59
2,4.37
4,9.02
3,6.8
1,2.85
3,7.23
3,8.33
4,11.18
4,11.44
2,7.23
4,11.87
4,12.97
3,11.18
4,15.82
Figure 4: A threshold tree.
Proposition 4.2. Any arc e ∈ E of the threshold tree
T linking node (l,s) with (l + 1,s
′
) can be deleted
whether ∀n ∈ C
(l,s)
it holds s
′
> S
n,l+1
.
Proof. Let us consider a path passing through node
(l, s). Clearly all the (remaining) samples belong-
ing to C
(l,s)
are not discarded at level l as S
n,l
= θ
l
.
Now if the path continues from (l, s) to (l+1,s
′
) with
s
′
> S
n,l+1
, ∀n ∈ C
(l,s)
, all the remaining samples be-
longing to C
(l,s)
will be rejected at level l + 1. Conse-
quently, it should have been more profitable with re-
spect to the objective function to have rejected them
at level l. In other words, any path passing through
arc e = ((l,s),(l + 1,s
′
)) is dominated by at least one
path passing through a node (l,s
′′
) with s
′′
> s.
In addition to the previous dominance property,
considering the TPR target, one can further prune T
by removing the paths that necessarily lead either to
poor 100%− TPR-solutions or to some too low TPR
values. A poor 100% − TPR-solution is a threshold
vector offering a TPR = 100% such that there still
exist some negative samples k that could have been
rejected by modifying the threshold vector, still pre-
serving the TPR = 100% value. It is clear that re-
jecting them will improve the FPR value and the to-
tal computation time. Poor 100% − TPR-solutions
can be easily filtered by removing from T any node
(l, s) ∈ V such that s < min
j∈J
S
j,l
. On the other hand,
one can also remove any node (l,s) ∈ V such that
the sum of positive samples having a score S
j,l
≥ s
is lower than TP. We further refer to T
p
(V
p
,E
p
) as
the pruned threshold tree obtained after applying the
previous reduction rules.
Considering the MSCRMP example depicted in
Figure 4, one obtains the pruned threshold tree rep-
resented in Figure 5, which “only” has 24 different
paths.
1,0
2,2.85
0,0
2,4.37
3,6.8
3,8.33
4,11.18
4,11.44
Figure 5: Pruned threshold tree.
Aiming at taking benefit from this pruned
threshold-tree, we propose below another BIP (BIP2)
flow formulation. As in the first BIP, we still con-
sider the binary x
n,l
variable that equals 1 whether
sample n is such that S
n,l
< θ
l
for the first time. Ad-
ditionally, we now introduce the ϕ
n,l
and ψ
s,t,l
bi-
nary variables. On the one hand, ϕ
n,l
= 1 whether
there exists a weak classifier at level u ≤ l such that
S
n,u
< θ
u
. Clearly, variables x
n,l
and ϕ
n,l
are linked
Mean Response-Time Minimization of a Soft-Cascade Detector
257

together by the relation ϕ
n,l
= ϕ
n,l−1
+ x
n,l
, which is
valid for any sample n and level l. On the other hand,
ψ
s,t,l
is a flow variable: ψ
s,t,l
= 1 whether the arc
e ∈ E
p
between node (l,s) ∈ V
p
and (l + 1,t) ∈ V
p
of T
p
is selected into the solution. The variables ψ
s,t,l
should be chosen such that they define a path in T
p
,
i.e.,
∑
(l−1,t)∈σ
−1
(l,s)
ψ
t,s,l−1
=
∑
(l+1,t)∈σ
(l,s)
ψ
s,t,l
, ∀(l,s).
The three kinds of variable are linked by the follow-
ing relation: x
n,l
≤
∑
t|S
n,l
<t
∑
(l+1,t)∈σ
(l,s)
ψ
s,t,l
≤ ϕ
n,l
.
It models that at any level l, a sample n can be re-
jected only if the selected score class (l,s) i such
that s > S
n,l
. As it can be observed, this second BIP
presents a reasonable amount of constraints, although
new variables have been introduced. The effective-
ness of this formulation is discussed in the next sec-
tion.
Second Binary Integer Program Formulation
(BIP2)
Maximize
L
∑
l=1
N
∑
n=1
"
x
n,l
L
∑
u=l+1
c
u
!#
(7)
Subject to
∑
n∈J
x
n,L+1
≥ TP (8)
ϕ
n,l
= ϕ
n,l−1
+ x
n,l
∀(n,l) (9)
ψ
0,0,1
+ ψ
0,1,1
= 1 (10)
∑
(l−1,t)∈σ
−1
(l,s)
ψ
t,s,l−1
=
∑
(l+1,t)∈σ
(l,s)
ψ
s,t,l
∀(s,l) (11)
x
n,l
≤
∑
t|S
n,l
<t
∑
s|(l+1,t)∈σ
(l,s)
ψ
s,t,l
≤ ϕ
n,l
∀(n,l) (12)
x
n,l
∈ {0,1},ϕ
n,l
∈ {0,1} ∀(n,l) (13)
ψ
s,t,l
∈ {0,1} ∀(s,t,l) (14)
5 EXPERIMENTS
5.1 Problem Instances
To validate our proposed models, a set of MSCRMP
instances are created using training images taken from
the public INRIA person dataset (Dalal and Triggs,
2005). The training is carried out using Piotr’s Com-
puter Vision Matlab Toolbox (Doll´ar, 2014). Each
person detection classifier is trained with discrete Ad-
aBoost using Histogram of Oriented Gradient (HOG)
features coupled with decision trees as weak classi-
fiers. The HOG features computed have the same
computation time (along with the associated decision
trees). Thus, c
l
is set to 1 at any cascade level l.
Once the soft-cascade is trained, every MSCRMP in-
stance can be characterized by the triplet (L,J,K),
namely the number of levels of the cascade, the num-
ber of positive and negative samples of the training
set. In our benchmark, L is picked from the set {4,
8, 16, 32, 64, 128, 256} and J from {16, 32, 64, 128,
256, 512, 1024, 2048}. For K, two cases are con-
sidered either K = J or K = 3J, further referred as
(1:1) and (1:3) class of instances, respectively. Note
that all the instances that do not respect J ≥ 2L are re-
moved, as this condition is an AdaBoost requirement
for the training. In total, 82 instances are generated
(41 for each (1:1) and (1:3) class). For each instance,
a soft-cascade is trained using DBP, BIP1 and BIP2
for every TPR value in {100%, 97.5%, 95%, 92.5%,
90%, 87.5%, 85%, 82.5%, 80%}. Let us highlight
that, even though some of these instances can be con-
sidered huge with respect to the number of variables
and constraints, an efficientMILP solver is commonly
able to deal with, they remain rather academic with
respect to real life training sets, which can present a
number of negative samples greater than 10-100 times
J with L ≥ 1000.
5.2 Experimental Analysis
All the experimental tests are carried out on an Intel
R
Core
TM
i5-4670 CPU 3.4 GHz processor machine
with 16GB DDR3 1600MHz RAM memory. Gurobi
Optimizer version 6.0, constrained to only use a sin-
gle CPU core, is used to solve all our BIP formula-
tions. We evaluate the two proposed BIP formulations
and compare their performances in terms of computa-
tion time, TPR and FPR. BIP1 solves 59% of the
(1:1) instances and only 46% of the (1:3) instances
for a TPR = 95%. BIP2 solves 100% of the (1:1)
instances and 88% of the (1:3) instances, including
the ones solved by BIP1. The non-solved instances
were indeed too huge to be loaded into the solver
due to memory limitation. Of the instances solved
optimally by both BIPs, BIP1 took 19 min in aver-
age (max = 324 min), while BIP2 took only 0.14 sec
(max = 1 sec). Of the harder instances that only BIP2
managed to solve, it did so with a mean computa-
tion time of 11 min. This computational gain indi-
cates clearly that the use of a flow formulation, com-
bined with the dominance properties, improves the ef-
ficiency of the solving process considerably.
For every TPR setting, the results obtained by the
BIP solver and that of the DBP algorithm with respect
to the total computation time are compared below.
Figure 6 illustrates the time gained considering a (1:3)
ICORES 2016 - 5th International Conference on Operations Research and Enterprise Systems
258

instance with L= 256 and J = 512. It can be observed
that the time saving increases for low TPR. Let us
highlight that the solutions obtained for TPR = 100%
are identical since, in this particular case, DBP is opti-
mal. We also point out that in almost all the solutions
obtained by both methods, FPR = 0%, which can be
explained by the low number K of negative samples,
which does not offer a large enough diversity.
80 82 84
86
88 90 92 94
96
98 100
64.5
65
65.5
66
66.5
67
67.5
True Positive Rate (%)
Mean Compute Time
Soft Cascade Mean Compute Time
Direct Backward Pruning
Binary Integer Program
Figure 6: Example of a Mean Computation Time gap be-
tween DBP and the proposed optimal approach.
0 20 40
60
80 100 120 140
160
180 200 220 240
260
0
5
10
15
20
25
Soft Cascade Length (Number of Weak Classifiers)
Relative Gain (%)
Compute Time Relative Gain
TPR = 80%
TPR = 82.5%
TPR = 85%
TPR = 87.5%
TPR = 90%
TPR = 92.5%
TPR = 95%
TPR = 97.5%
TPR = 100%
Figure 7: Mean-Computation-Time relative gain between
DBP and our approach on (1:3) instances.
Figure 7 shows the mean relative time gain per-
centage, as a function of TPR and L, between
DBP-solutions and our optimal ones for all solved
(1:3) instances. The relative gain is expressed as
(C
DBP
−C
BIP
) ÷ C
DBP
, where C
DBP
and C
BIP
are the
mean computation times for the DBP and optimal so-
lutions, respectively. These results confirm that the
DBP algorithm is really under optimal in terms of
response time as a 22% gain can be obtained for
TPR = 80%. Nevertheless we also observe that a
peak is reached around L = 10 and that the gain de-
creases for larger L value. As already mentioned,
this is probably due to our instances that do not of-
fer a high enough diversity of negative samples. As a
consequence, an FPR = 0 value is reached only after
around 10 levels and, in all the remaining levels, all
the true positive samples are simply conserved (which
means that only around 10-level cascade would have
been necessary for the detection). In this situation,
our optimal approach does not provide any additional
profit in comparison with DBP, which explains the de-
creasing gain. A greater profit could have been ob-
tained by increasing the size, hence the diversity, of
the negative samples set. Unfortunately, due to the
solver’s limitations, our approach is not able to effi-
ciently solve such large instances.
6 CONCLUSION
In this paper, we investigated the MSCRMP, which
proved to be relevant for training time-response effi-
cient soft-cascade detectors. We gave a formal defini-
tion of this optimization problem and proved its NP-
hardness. Two BIP formulations were proposed that
allow to find optimal threshold vector using MILP
solvers. We showed that the problem consists in find-
ing an optimal path inside a threshold tree. We also
provided dominance properties that allow to drasti-
cally prune this threshold tree and considerably cut
the search space. The second BIP formulation, based
on a flow formulation, advantageously exploits the
threshold tree and is actually quite efficient to solve
medium-size MSCRMP instances. The results put
into evidence that the classical DBP algorithm, com-
monly used in soft-cascade design for fixing threshold
vectors, is not adapted for finding good time-response
cascade. The exact approach is indeed able to im-
prove the time response by more than 20%, keeping
the TPR and FPR performances unchanged. Unfor-
tunately, the BIP solver cannot deal easily with large-
size problem instances. Nevertheless, the results ob-
tained so far are quite encouraging and justify the
need for additional research to design more advanced
exact approaches for the MSCRMP (e.g., branch-and-
bound procedures, dynamic programming formula-
tions or other decompositionapproaches) that can bet-
ter cope with realistic large-size problem instances.
ACKNOWLEDGEMENTS
We thank the Mexican National Council of Science
and Technology (CONACYT) and the French Na-
tional Center for Scientific Research (CNRS) for their
support.
Mean Response-Time Minimization of a Soft-Cascade Detector
259

REFERENCES
Bourdev, L. and Brandt, J. (2005). Robust object detection
via soft cascade. In IEEE Conference on Computer
Vision and Pattern Recognition (CVPR’05), volume 2,
pages 236–243.
Breitenstein, M., Reichlin, F., Leibe, B., Koller-Meier,
E., and Van Gool, L. (2011). Online multiper-
son tracking-by-detection from a single, uncalibrated
camera. Pattern Analysis and Machine Intelligence,
IEEE Transactions on, 33(9):1820–1833.
Dalal, N. and Triggs, B. (2005). Histograms of oriented gra-
dients for human detection. In Computer Vision and
Pattern Recognition, 2005. CVPR 2005. IEEE Com-
puter Society Conference on, volume 1, pages 886–
893 vol. 1.
Doll´ar, P. (2014). Piotr’s Computer Vision Matlab Toolbox
(PMT).
Doll´ar, P., Appel, R., Belongie, S., and Perona, P. (2014).
Fast feature pyramids for object detection. IEEE
Transactions on Pattern Analysis and Machine Intel-
ligence, 36(8):1532–1545.
Doll´ar, P., Wojek, C., Schiele, B., and Perona, P. (2012).
Pedestrian detection: An evaluation of the state of the
art. IEEE Transactions on Pattern Analysis and Ma-
chine Intelligence, 34(4):743–761.
Ess, A., Schindler, K., Leibe, B., and Van Gool, L. (2010).
Object detection and tracking for autonomous navi-
gation in dynamic environments. The International
Journal of Robotics Research, 29(14):1707–1725.
Everingham, M., Van Gool, L., Williams, C. K. I., Winn,
J., and Zisserman, A. (2010). The pascal visual ob-
ject classes (VOC) challenge. International Journal
of Computer Vision, 88(2):303–338.
Garey, M. R. and Johnson, D. S. (1979). Computers
and Intractability: A Guide to the Theory of NP-
Completeness. W. H. Freeman & Co., New York, NY,
USA.
Ger´onimo, D., L´opez, A., Sappa, A., and Graf, T. (2010).
Survey of pedestrian detection for advanced driver as-
sistance systems. IEEE Transactions on Pattern Anal-
ysis and Machine Intelligence, 32(7):1239–1258.
Jourdheuil, L., Allezard, N., Chateau, T., and Chesnais, T.
(2012). Heterogeneous adaboost with real-time con-
straints - application to the detection of pedestrians by
stereovision. In Proc. VISAPP, pages 539–546.
Mekonnen, A. A., Lerasle, F., Herbulot, A., and Briand,
C. (2014). People detection with heterogeneous fea-
tures and explicit optimization on computation time.
In International Conference on Pattern Recognition
(ICPR’14), Stockholm, Sweden.
Pan, H., Zhu, Y., and Xia, L. (2013). Efficient and accurate
face detection using heterogeneous feature descriptors
and feature selection. Computer Vision and Image Un-
derstanding, 117(1):12 – 28.
Russakovsky, O., Deng, J., Su, H., Krause, J., Satheesh, S.,
Ma, S., Huang, Z., Karpathy, A., Khosla, A., Bern-
stein, M., Berg, A. C., and Fei-Fei, L. (2015). Ima-
geNet Large Scale Visual Recognition Challenge. In-
ternational Journal of Computer Vision (IJCV), pages
1–42.
Schapire, R. E. (2003). The boosting approach to machine
learning: An overview. Lecture Notes in Statistics,
pages 149–172.
Tang, D., Liu, Y., and kyun Kim, T. (2012). Fast pedestrian
detection by cascaded random forest with dominant
orientation templates. In Proceedings of the British
Machine Vision Conference (BMVC’12), pages 58.1–
58.11. BMVA Press.
Viola, P. A. and Jones, M. J. (2004). Robust real-time face
detection. International Journal of Computer Vision,
57(2):137–154.
Zhang, C. and Viola, P. A. (2008). Multiple-instance
pruning for learning efficient cascade detectors. In
Advances in Neural Information Processing Systems
(NIPS’08), pages 1681–1688.
Zhang, M. and Alhajj, R. (2009). Content-based image re-
trieval: From the object detection/recognition point of
view. In Ma, Z., editor, Artificial Intelligence for Max-
imizing Content Based Image Retrieval, PA: Informa-
tion Science Reference, pages 115–144. Hershey.
Zhang, X., Yang, Y.-H., Han, Z., Wang, H., and Gao, C.
(2013). Object class detection: A survey. ACM Com-
put. Surv., 46(1):10:1–10:53.
Zhu, Q., Yeh, M.-C., Cheng, K.-T., and Avidan, S. (2006).
Fast human detection using a cascade of histograms
of oriented gradients. In IEEE Conference on Com-
puter Vision and Pattern Recognition (CVPR’06),
New York, NY, USA.
ICORES 2016 - 5th International Conference on Operations Research and Enterprise Systems
260
