Scalable Distributed Sensor Network for Contact-less Gait Analysis
A Marker-less, Sensor-based System for Steering Rehabilitation Measures
Heinz-Josef Eikerling, Michael Uelschen and Florian Lutterbeck
University of Applied Sciences Osnabrueck, Faculty for Engineering and Computer Science, Barbarastr. 16,
D-49076 Osnabrück, Germany
Keywords: Sensor Network, Distributed System, Wireless Transmission, Gait Analysis, Motion Capturing,
Synchronisation.
Abstract: We describe the steps taken to evolve a system which enables gait analysis of persons recovering from
illnesses affecting gait. The starting point is a centralized system which is turned into a fully distributed
environment. The upgraded system is evaluated in terms of accuracy of the generated data by comparing it
with the initial system and a marker-based reference system. Elementary gait metrics are used for these
comparisons. Regarding the reference system the deviation (hence error) was found to be below 2%.
1 INTRODUCTION
We describe the steps taken to evolve a system
supporting gait analysis of persons recovering from
illnesses affecting gait from a centralized to a fully
distributed environment.
Through prior work (Uelschen and Eikerling,
2015) it was shown that the initial version of the
D
YN
M
ETRICS
system is capable of monitoring the
progress of rehabilitation measures being applied to
persons recovering from surgical treatments in terms
of general viability, setup and calibration of the
sensor system and the precision of the derived gait
characteristics: speed, step number and stride length,
cadence and center of mass (CoM) displacement.
The D
YN
M
ETRICS
system consists of a chain of
adjacent sensors for recording and analysing human
gait. In addition to the elementary temporal-spatial
parameters the system recognize all 8 phases of gait
according to the RLANC notion (Perry and
Burnfield, 2010). This information allows the
physician or the physiotherapist to tune the post-
operative treatment in order to improve the overall
rehabilitation process.
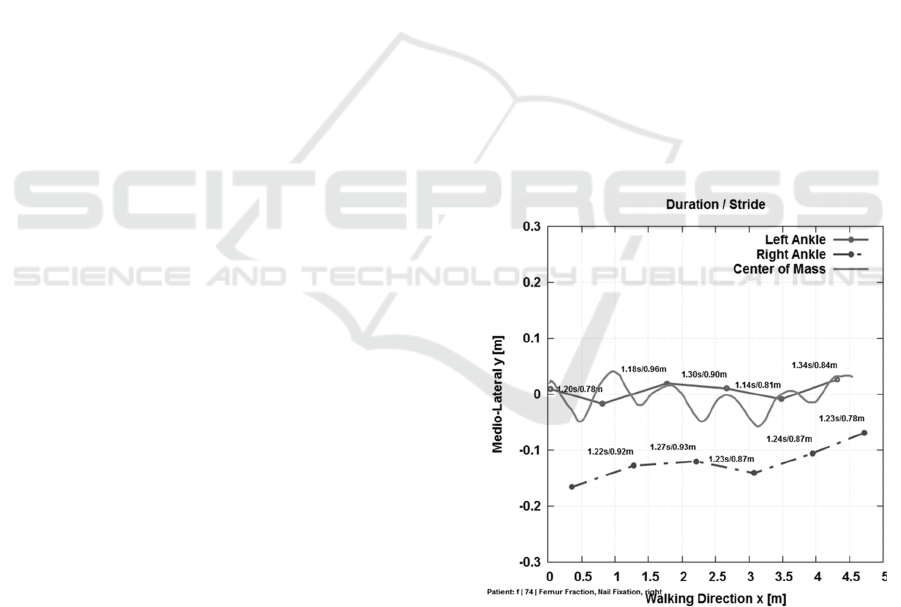
The general applicability of the system was
demonstrated through a clinical trial with 54 patients
being treated by the orthopaedic department of a
rehabilitation centre. Figure 1 illustrates the gait
pattern of a 74-year-old female patient with a nail
fixation of the right femur. The outcome of
D
YN
M
ETRICS
reveals a shift of the center of mass to
the contralateral leg in order to relieve the operated
leg.
Figure 1: Gait Pattern of Rehabilitation Patient.
2 BACKGROUND
D
YN
M
ETRICS
v1
features a set of low-cost but
nevertheless performant MS Kinect (version 1)
sensors and as such constitutes a mobile and marker-
less tracking system. However, the initial version of
Eikerling, H-J., Uelschen, M. and Lutterbeck, F.
Scalable Distributed Sensor Network for Contact-less Gait Analysis - A Marker-less, Sensor-based System for Steering Rehabilitation Measures.
DOI: 10.5220/0005707801950202
In Proceedings of the 9th International Joint Conference on Biomedical Engineering Systems and Technologies (BIOSTEC 2016) - Volume 1: BIODEVICES, pages 195-202
ISBN: 978-989-758-170-0
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
195

the system had some shortcomings which to a
certain extent have to be attributed to the Kinect v1:
The range of Kinect v1 is limited.
Precision of the sensor is lower when
compared to Kinect v2.
The v1 sensor is susceptible to interference
with sun light or light originating from other IR
sources.
The latter applies to the sensor itself: the IR
fields of two different Kinect v1 sensors
interfere. Hence skeleton tracking can be
significantly marred. This also limits the
options to set up tracking environments
comprising more than 1 sensor. According to
own experimentation reported in (Uelschen and
Eikerling, 2015) the line-up of sensors each
twisted by a 42 degree angle ( +/- 3 degrees)
with respect to the walking trajectory works
best.
Scalability is reduced since a maximum of 4
sensors can be connected to a single machine.
Certain hardware components (e.g., motor to
adjust the inclination) lack robustness.
A decision was made to upgrade the initial
system which was built on top of the Kinect v1
sensor to Kinect v2.
3 SYSTEM ARCHITECTURE
3.1 Prerequisites & Hardware
A comparison of Kinect v1 & v2 regarding the key
features is shown in the table below:
Table 1: Comparison Kinect v1 & v2 features.
Feature Kinect v1 Kinect v2
RGB camera
640 x 480
@
30fps
1920 x 1080
@
30 fps
Depth camera
320 x 240 512 x 424
Nominal range
0.4m
–
4
m
0.5m
–
4,5
m
Real range
0.8m
–
3.5
m
1m
–
4
m
Tracked
j
oints 20 25
Max. no. tracked
skeletons
2 6
Hand tracking
N
o Yes
Face tracking
[Yes] Yes
USB 2.0 3.0
Tilt moto
r
Yes
N
o
Max. #Kinects
per host computer
4 1
Supported OS Win 7, Win
8 / 8.1
Win 8 / 8.1
(64-Bit)
The sensor version upgrade requires major
design modifications and imposes several
challenges:
Kinect v2 implicates much higher computing
and networking resources which can hardly be
matched with a single machine. According to
the table above, a 64 Bit system is mandatory
(M1).
Thus a fully distributed approach to capturing
the sensor feeds has to be implemented (M2).
Since the sensors have to be deployed to one
machine each, for gathering the produced data
synchronisation issues have to be resolved
(M3).
Due to the reduced interference of Kinect v2
new geometric arrangements of the sensor
network are thinkable which on the other side
require to modify system calibration /
configuration procedures (M4).
With respect to M1, a host machine with a 64 Bit
quad core processor and 8 GB of main memory
running Windows 8 is recommended by Microsoft.
The Kinect SDK makes heavily use of parallel
computations which is done on a graphics board
supporting at least DirectX v11. The official
requirements concerning the computing
requirements are a bit fuzzy, since tasks are swapped
between CPU and GPU and vice versa. According to
own experimentation a dual core system with 4 GB
of memory was found to serve the purpose.
Factually an Intel i5 CPU @ 2.0…3.0 GHz
processor with on-board HD 4600 graphics
constitutes somewhat a lower bound. The distance
between sensor and host machine is limited by the
USB 3 connection, i.e. 11m.
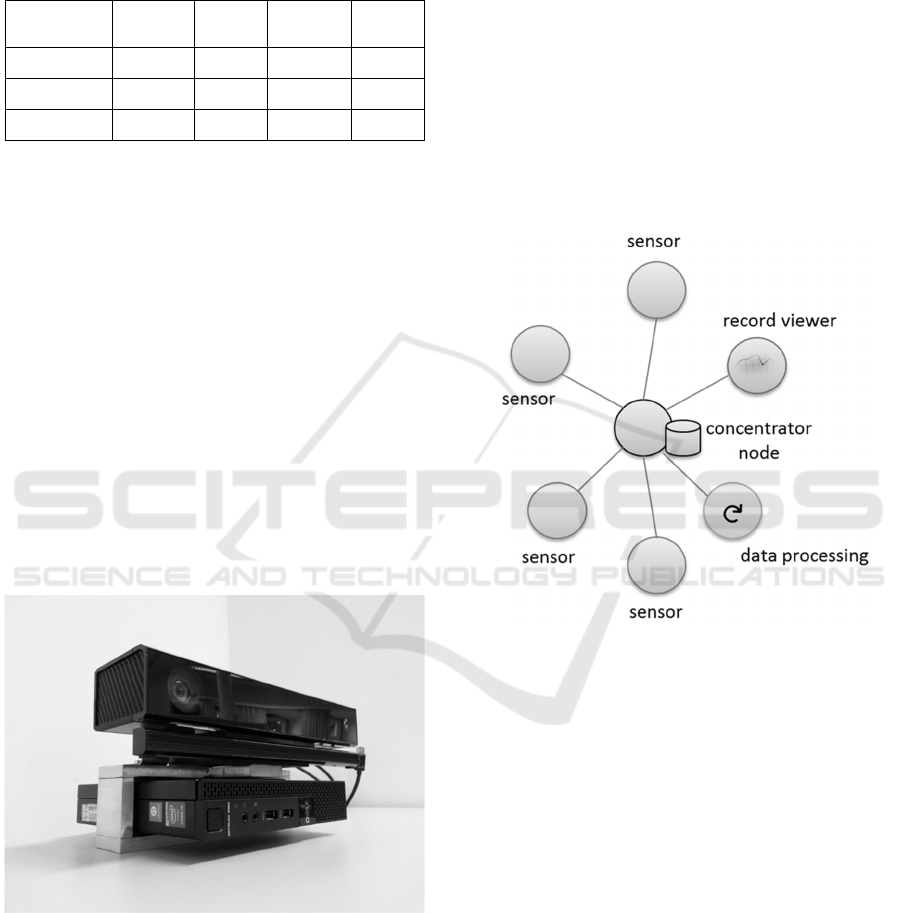
Figure 2: Sensor mounted on mini PC via clamp.
In a feasibility study we checked the CPU load
(min., max., mean) of the sensor nodes and the
BIODEVICES 2016 - 9th International Conference on Biomedical Electronics and Devices
196
server for the configuration described above. As can
be seen in Table 2, performance can be fulfilled by
the proposed configuration.
Table 2: CPU load for v2 server and sensor nodes.
CPU load Server Node
#1
Node
#2
Node
#3
Minimum
0.7% 10.0% 7.3% 10.5%
Maximum
29.0% 0.5% 33.0% 25.1%
Average
3.2% 14.6% 12.8% 15.3%
3.2 Design
In order to implement modifications M1 and M2 we
configured a sensor node comprising the Kinect v2
and the host machine consisting of a mini PC
running the raw data processing. In order to keep the
effort for wiring the components as low as possible,
the nodes transmit the collected tracking via wireless
links, thus realising a Wireless Sensor Network.
The node as shown in Figure 3 can be mounted
on a tripod via a special fixation (see Figure 2)
incorporating a metal clamp to alleviate effects of
shock (e.g., caused by unintentionally dragging the
cables attached to the sensor). This fixation also
eases the accurate alignment of the sensors with
respect to the horizontal and frontal plane. For the
latter it is needed to painstakingly control the tilt
angle.
Figure 3: Fixation of Kinect v2 on top of mini PC.
Since the central approach (i.e., all sensors
directly connected to one central hub) in
D
YN
M
ETRICS
v1 is not feasible any more, different
topologies for connecting the nodes have to be
studied. Aside from the prevalent models (tree,
chain, cluster, flat) we are in favour of a simple star
topology in which one dedicated node (concentrator
node) is responsible for collecting and storing the
data being generated by the sensor nodes. The
transmitted data consists of the position of the joints
according to the sensor space (x/y/z coordinates).
The concentrator node stores the collected data
and serves it to applications for processing,
analysing and for visualising the recorded or live
data. Within the analysis the sensor data fusion is
done. We follow a central-level (Klein, 2012),
cooperative (Brooks and Iyengar, 1998) approach in
which the data originating from a pair of adjacent
sensors is used to compute the position of a body
joint pertinent to the global coordinate space. The
implemented procedure is an adaptation of
Umeyama’s algorithm (Umeyama, 1991).
Figure 4: Topology of D
YN
M
ETRICS
v2 sensor network.
3.3 System Interfaces
Assuming sensor and concentrator node to reside in
the same network, a simple client / server interface
for registering sensor nodes and for collecting the
tracking data was designed. Moreover, through a
proprietary protocol implemented in a lean
management layer, client software updates can be
deployed to the sensor nodes as follows:
1. The concentrator broadcasts a port under
which the server software expects the
tracking data to be delivered.
2. The sensor node as client connects to the
server.
3. Through transmitting the checksum of the
installed client software package the need for
an update can be detected. The package can
be replaced if necessary.
4. The server then asks for the ID of the client
Scalable Distributed Sensor Network for Contact-less Gait Analysis - A Marker-less, Sensor-based System for Steering Rehabilitation
Measures
197

and retrieves locally stored configuration file
of that client / sensor node. Subsequently the
configuration commands are sent to the
client.
5. Afterwards the sensor transmits tracking data
as time-stamped records to the server.
The records are delivered in a binary format of
fixed size (b
s
= 392 Byte). For a rate of f = 30
captures / s this results in a transmission rate of w’
min
= b
s
· f = 12 kByte/s per sensor. The overall
bandwidth requirement in a setup with n sensors is
therefore w
min
(n) = n · w’
min
, e.g. w
min
(4) = 48
kByte/s. A time-stamp t
c
(i) marking the arrival of a
record i at the concentrator is stored along with it.
Additional to the tracking data, images (low
resolution, approx. 328 kByte per image) are
captured by the sensor node at a configurable rate
(default: 7 images / s). These images are tentatively
stored in the sensor node during tracking. They can
be used to check the plausibility of the data and
rectify artefacts being detected particularly during
the off-line data analysis. Once the recording is
stopped, the images are offloaded from the clients to
the server. This is done in order to as much as
possible discharge the communication channel
during the recording. The local time-stamp of the
capture precedes the transmitted image.
4 IMPLEMENTATION ISSUES
4.1 Software Modifications
For implementing the above concepts, several
modifications had to be applied to the D
YN
M
ETRICS
v1 software package. In the Kinect SDK 2.0 the
tracking data is stored in the body object instead of
the skeleton in previous releases. Also the changes
(naming and virtual placement on the body) with
respect to the sensed joints were implemented. In
order to keep the previous version with Kinect v1
sensors functional, the new release of the
D
YN
M
ETRICS
software contains a switch to toggle
between a Kinect v1 and v2 mode.
4.2 Wireless Connectivity
The transmission of recorded data between sensor
and concentrator node is done via WLAN. Hence we
had to deal with the intricacies of wireless
communication, i.e. reduced bandwidth plus
increased instability of the connection and higher
latency.
Special attention had to be paid to the latter.
Whereas in an Ethernet LAN the latency is and
rather constantly below 5 ms, according values in a
WLAN range between 8 and 40 ms. Additionally the
Jitter (i.e., the fluctuation of the latency) is much
higher. This can deteriorate the precision of the
measurements since at a rate of 30 captures / s
(capture interval approx. 33 ms) the capture time
interval is below the latency. Since otherwise the
order of events can become wrong, the sensor time-
stamp t
s
(i) for record i received by the concentrator
node is analyzed and a new correction value (=
skew)
σ
(i) is computed and applied to the sensor-
generated time-stamp t
s
(i), thus yielding a corrected
time-stamp t’
s
(i). This value is also contained in the
record stored at the concentrator node.
In the current setup we feature the 802.11 ac
standard running in the 5 GHz band for minimizing
interference with other wireless networks.
Figure 5: Setup for comparison v1 & v2.
4.3 Time Stamping & Control
For keeping the timing skew between the sensor and
concentrator node clocks within certain boundaries,
a mechanism for controlling the clocks is required. It
has to be remarked that the drift of the local clock
ranges between 25….50 ms / h. We aim at a
maximum deviation of 10 ms which is well below
the capture time interval.
In order to achieve this we could not use
standard time synchronization mechanisms (e.g.,
NTP) since the time needed for synchronization
varies and be up to 2
13
s ≈ 2 h. Instead we worked
out a proprietary mechanism: the concentrator node
BIODEVICES 2016 - 9th International Conference on Biomedical Electronics and Devices
198
hosts a time server which is continuously accessed
by the sensor nodes with a refresh interval of 5s. The
client computes the clock skew
σ
(i) at the i-th
interval between contractor node and reference node.
The update interval is set to 5s. If for two subsequent
skew values |
σ
(i) -
σ
(i-1)| > 10 ms applies, an error
message is thrown and the tracking data of the
current recording is discarded. The local clock of the
sensor node is not corrected since the latency at the
time of propagation is not known.
We tested the fault rates for different network
configurations. The fault rate for a 1 Gbit Ethernet is
0,035% / h. For 802.11 n (2.4 GHz) and 802.11 ac (5
GHz) WLANs the values are 0,5% / h and 0,06% / h
respectively. The latter is the value for the preferred
network configuration and appears to be acceptable.
5 VA L I D AT I O N
5.1 Comparison System V1 Vs. V2
In order to judge the accuracy of the modified
system a comparative measurement of the two
sensor systems was organized. Both systems were
run in parallel by stacking the v1 sensor on top of v2
as shown in Figure 5. The joint positions of the
tracked skeletons will later on be corrected with
respect to the constant vertical offset. The
measurement was done for 3 test subjects. In Table 3
the essential statistics are shown. Due to the higher
sensing range the duration and hence the number of
the tracked skeletons is noticeably higher for the v2
recordings.
Table 3: DYNMETRICS v1 & v2 tracking statistics.
Person ID 1 2 3
Kinect
Version
v1 v2 v1 v2 v1 v2
Time
interval
7009
ms
7473
ms
6287
ms
6737
ms
6736
ms
7075
ms
# Skeletons
300 322 294 318 336 355
Skeletons /
second
42.8 43.1 46.8 47.2 49.9 50.1
Afterwards the recorded raw data delivered by
the sensors is fused and processed by the gait
analysis software. Table 4 accounts for the
computed essential metrics: number of detected
steps, cadence, average stride (= 2 steps) length,
average stride difference. Taking the v1 values as
the reference, the deviation (yielding the assumed
error for the v2 measurements) ranges between
0.66% and 6.23%. The differences in length were
not taken into account here since those values come
close to the overall precision of the Kinect sensor
which is approx. +/-2% for the stride length
measurement as reported in (Uelschen and
Eikerling, 2015). Hence the average deviation / error
is 2.8%.
Table 4: Kinect v1 & v2 gait metrics.
Person ID
1 2 3
Kinect
Version
v1 v2 v1 v2 v1 v2
# Steps
5 6 6 6 5 5
Cadence
75 76 85 84 67 65
∅ stride
length
1.37 m 1.36 m 1.27 m 1.28 m 1.47 m 1.45 m
∅ stride
difference
0.11 m 0.06 m 0.05 m 0.10 m 0.11 m 0.07 m
Deviation /
error
6.23% 0.66% 1.49%
Aside from comparing the accuracy with respect
to gait metrics we also accounted for the different
sensing ranges of v1 and v2 installations. According
to prior experimentation a distance of 1.4 m of the
sensor nodes was found to be optimal for v1.
Starting with a value of 2.30 m for v2 sensor node
distances this value was incrementally decreased in
10 cm steps so as to find the maximum distance
permitting a faultless tracking. This optimal value
was determined to be 2.00 m, thus outperforming the
range of v1 by 42%.
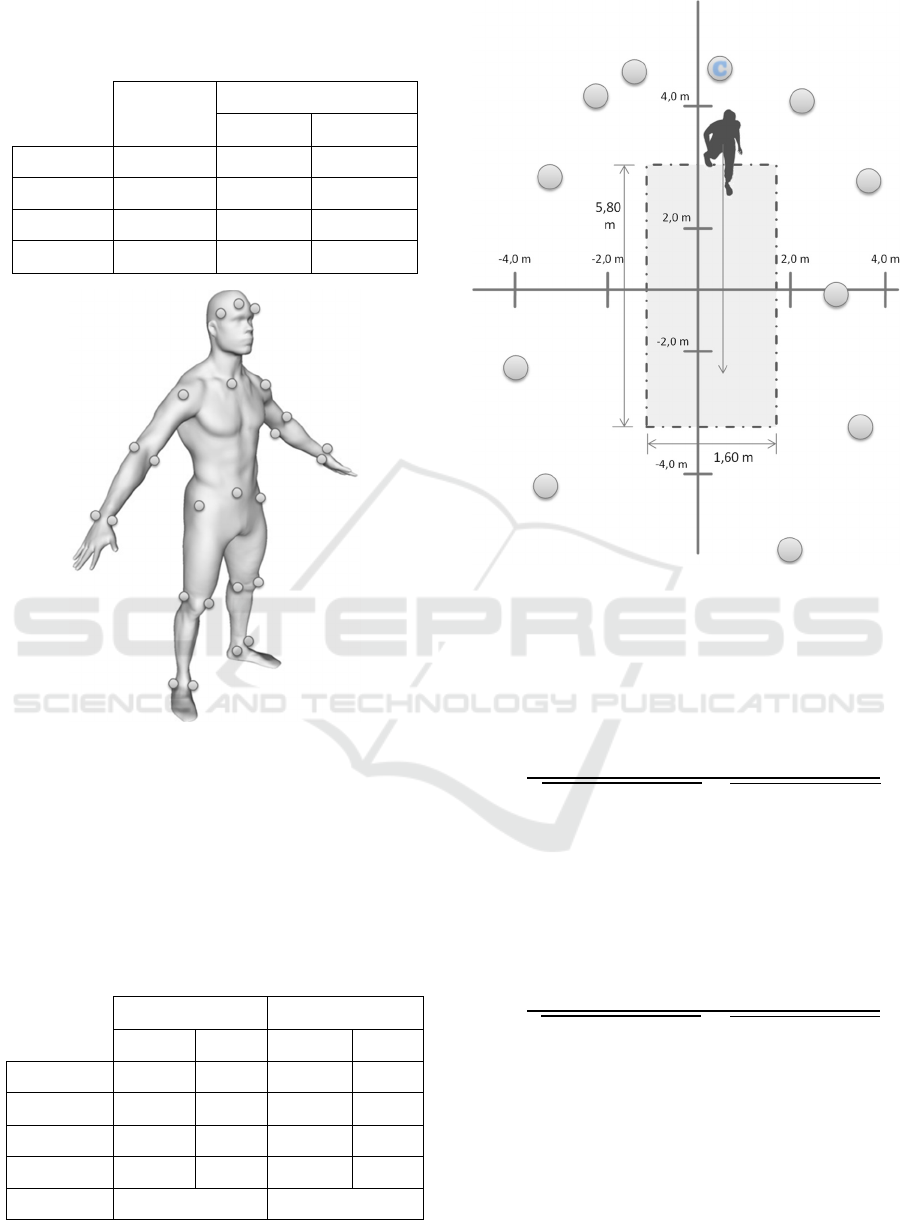
5.2 Comparison DYNMETRICS V2 Vs.
QualiSys
As mentioned in the introduction, conceptually the
precision of the marker-less tracking systems is
lower than that of marker-based systems. The
advantage of marker-based systems comes with the
drawback of a much higher setup time for starting a
measurement which is needed to tag the subject (10
– 15 min per person). Figure 6 shows the markers
used for comparing the D
YNMETRICS v2 with the
QualiSys tracking system.
For the comparison 4 subjects were examined
and for each subject 5 to 7 runs were recorded (see
Table 5). As can be seen in the table the range of
D
YNMETRICS (DM) as indicated by the average
number of detected steps is higher when compared
Scalable Distributed Sensor Network for Contact-less Gait Analysis - A Marker-less, Sensor-based System for Steering Rehabilitation
Measures
199
to QualiSys (QS).
Table 5: D
YN
M
ETRICS
vs. QualiSys test configurations.
# Records
# Steps
DM QS
Person 1 7 7,7 4,9
Person 2 5 7,0 2,6
Person 3 5 6,4 4,2
Person 4 5 6,6 4,4
Figure 6: Markers used for QualiSys tracking.
Table 6 compares the computed essential gait
metrics cadence and stride length as mean values for
D
YN
M
ETRICS
and QualiSys. As can be derived from
the values, the average difference for stride length
and cadence is 1.94% and 3.16% respectively. The
latter can be mainly attributed to the calculated
cadence of person 2 measured via QualiSys.
Table 6: D
YN
M
ETRICS
vs. QualiSys computed metrics.
∅ Cadence ∅ Stride
DM QS DM QS
Person 1 104.4 107.4 1.34 1.36
Person 2 99.0 103.7 1.57 1.63
Person 3 93.4 97.1 1.38 1.41
Person 4 104.9 106.0 1.38 1.38
∅ Deviation
3.16% 1.94%
Figure 7: Placement of QualiSys sensors. Dedicated
camera for taking control images (c) is marked.
Assuming a linear correlation between DM and
QS concerning the examined metrics, we can also
compute the Pearson product-moment correlation
coefficient (Samuels, 2015):
∑
,
∙
,
∑
,
∙
∑
,
, where
and
are the mean values for the
cadence for all subjects and
,
and
,
are the
recorded average cadence values for person w.r.t.
to the D
YN
M
ETRICS
and QualiSys measurements.
Similarly, we can compute the correlation
coefficient for stride:
∑
,
∙
,
∑
,
∙
∑
,
As a result, we get the values for
0.968
and
0.991
.
5.3 Discussion
As can be seen in the previous chapter, the deviation
of the elementary metrics determined by the
upgraded system is below 4% for all metrics
C
BIODEVICES 2016 - 9th International Conference on Biomedical Electronics and Devices
200
averaging 2.5% when compared to the v1 system
and the QualiSys system. Through extensive testing
reported in earlier work, the accuracy of
D
YN
M
ETRICS
v1 was found to be +/-2%. Therefore
the deviation roughly equals the error of the
reference systems.
The determined correlation coefficients show
that there is a close and linear correlation between
D
YN
M
ETRICS
v2 and QualiSys measurements.
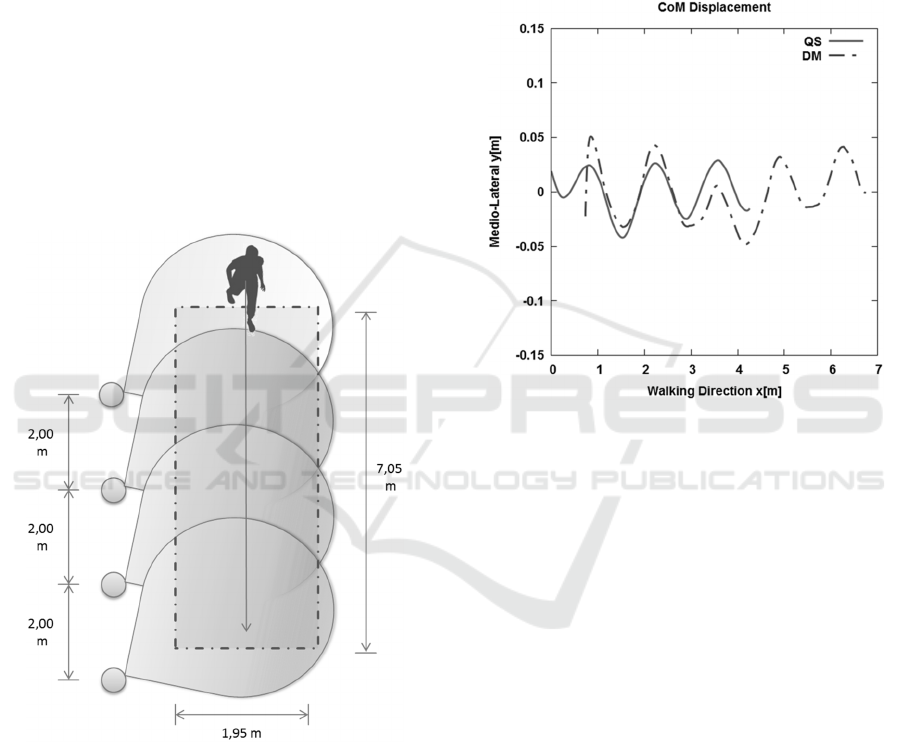
Aside from these accuracy considerations there
are other differences. As pointed out above, the
nominal path length of v2 is approx. 42% longer (2.0
m vs. 1.4 m per sensor) when compared to v1. For
the comparison with the QualiSys tracking system
the length after cropping was determined to be 7.05
m for D
YN
M
ETRICS
v2 (see Figure 8) whereas the
according value for QualiSys was found to be 5.80
m (see Figure 7). For achieving these lengths 4 and
11 sensors respectively were required.
Figure 8: Setup for D
YN
M
ETRICS
measurement.
During the comparison of D
YN
M
ETRICS
v2 and
QualiSys we also accounted for the time needed to
prepare the 4 test subjects for a tracking by means of
QualiSys. The time for this individual preparation
ranged between 10 to 15 min whereas D
YN
M
ETRICS
does not require a per-patient preparation time.
Beyond the basic gait metrics we also examined
the derived advanced metrics. Figure 9 compares the
computed CoM displacement of D
YN
M
ETRICS
v2
and QualiSys for a data sample. Both periods of the
recorded walking pattern are rather identical. The
amplitude varies slightly due to the fact that the
positions of the joints recognized by the Kinect
sensor differ from the respective marker positions
utilized by the QualiSys system. This particularly
applies to the upper limb joints.
As a result of this the calculations of the center
of mass for the two systems deviate from each other.
This is also caused by our amendable setup in which
Figure 9: Comparison of CoM displacements.
the D
YN
M
ETRICS
v2 system stretches a significantly
longer tracking area. In an improved configuration
the QualiSys tracking area would be prolonged by at
least 2 meters and the overlapping area would be 6
meters in order to gain meaningful data.
6 SUMMARY
Though similar systems using Kinect v1 were
described elsewhere, see e.g. (Gabel et al., 2012),
(Saiyi Li et al., 2014) & (Qiu, J. W. et al., 2014),
through this work we wanted to answer two pending
questions pertaining to the use of marker-less sensor
systems for gait analysis: (i) are such marker-less
systems (D
YN
M
ETRICS
and alike) in general
applicable? and (ii) what precision can be achieved?
The results presented in this paper give rise to
affirm the statement in the first question. With the
applied modifications the robustness and the
scalability could be increased without deteriorating
precision. In response to the second question we
found that the error with respect to a marker-based
system can be assumed to be 2% concerning basic
Scalable Distributed Sensor Network for Contact-less Gait Analysis - A Marker-less, Sensor-based System for Steering Rehabilitation
Measures
201
gait metrics. This is at least outweighed by the
downside of marker-based systems regarding the
overhead for setup and handling.
7 OUTLOOK
Though we have shown the general feasibility of our
implementation of a marker-less tracking system, we
also pointed to its limitation concerning precision
and accuracy which to our mind is intrinsic can
hardly be changed.
Future work will focus on including other
metrics (partly derived out of the basic ones
presented here) as described in (Perry and Burnfield,
2010) and the consideration of other bother parts
impacting and characterizing gait.
Figure 10: Alternative setup for full body tracking.
For instance arm swinging is rather symptomatic
for a person (Meyns et al., 2013). However,
determining the exact positioning of the arms using
a marker-less tracking system is rather challenging.
It has to be particularly ensured that all segments of
the arm are visible to the sensor system during the
recording. Hence the geometrical arrangement needs
to be revised such that sensors are deployed on both
sides of the walking trajectory (see Figure 10). Due
to interferences this turned out to be impossible with
the Kinect v1.
With the new sensor release and the concepts
presented in this paper new opportunities in this
regard are looming, although essential parts of the
software will have to revised: since the arms and
legs of the tracked person may occasionally not
visible to one particular sensor, the lacking data will
have to be provided by one of the sensors in
juxtaposition. Hence a revised fusion algorithm is
demanded.
ACKNOWLEDGEMENTS
This work was supported by a grant of University of
Applied Sciences Osnabrück.
REFERENCES
Brooks, R.R. and Iyengar, S.S. (1998), Multi-sensor
fusion: Fundamentals and applications with software,
Prentice Hall, Upper Saddle River, NJ.
Gabel, M., Gilad-Bachrach, R., Renshaw, E. and Schuster,
A. (2012), “Full body gait analysis with Kinect”,
Conference proceedings … Annual International
Conference of the IEEE Engineering in Medicine and
Biology Society. IEEE Engineering in Medicine and
Biology Society. Annual Conference, Vol. 2012, pp.
1964–1967.
Klein, L.A. (2012), Sensor and Data Fusion: A Tool for
Information Assessment and Decision Making, 2nd
ed., Society of Photo-Optical Instrumentation
Engineers (SPIE), Bellingham.
Meyns, P., Bruijn, S.M. and Duysens, J. (2013), “The how
and why of arm swing during human walking”, Gait &
Posture, Vol. 38 No. 4, pp. 555–562.
Perry, J. and Burnfield, J.M. (2010), Gait analysis:
Normal and pathological function, 2. ed., SLACK,
Thorofare, NJ.
Qiu, J. W. et al. (2014), “Continuous Human Location and
Posture Tracking by Multiple Depth Sensors”, IEEE
International Conference on, and Green Computing
and Communications (GreenCom),, pp. 155–160.
Saiyi Li, Pathirana, P.N. and Caelli, T. (2014), “Multi-
kinect skeleton fusion for physical rehabilitation
monitoring”, Conference proceedings … Annual
International Conference of the IEEE Engineering in
Medicine and Biology Society. IEEE Engineering in
Medicine and Biology Society. Annual Conference,
Vol. 2014, pp. 5060–5063.
Samuels, M.L. (2015), Statistics for the life sciences,
global edition, 5th edition, Pearson Education Limited,
[Place of publication not identified].
Uelschen, M. and Eikerling, H.-J. (2015), “A Mobile
Sensor System for Gait Analysis supporting the
Assessment of Rehabilitation Measures”, September
9–12, 2015, Atlanta, GA, USA.
Umeyama, S. (1991), “Least-squares estimation of
transformation parameters between two point
patterns”, IEEE Transactions on Pattern Analysis and
Machine Intelligence, Vol. 13 No. 4, pp. 376–380.
BIODEVICES 2016 - 9th International Conference on Biomedical Electronics and Devices
202
