
Welding Groove Mapping
Implementation and Evaluation of Image Processing Algorithms on Shiny Surfaces
Cristiano Rafael Steffens, Bruno Quaresma Leonardo, Sidnei Carlos da Silva Filho, Valquiria Huttner,
Vagner Santos da Rosa and Silvia Silva da Costa Botelho
Federal University of Rio Grande – FURG, Av. It
´
alia – Carreiros – Km 8, 96203–900, Rio Grande, RS, Brazil
Keywords:
Robotics, Image Processing, Automation, Welding Robot, Multi-exposure Composition.
Abstract:
Electric arc welding is a key process in the heavy steel industries. It is a very complex task that demands a high
degree of control in order to meet the international standards for fusion welding. We propose a Vision-Based
Measurement (VBM) system and evaluate how different algorithms impact the results. The proposed system
joins hardware and software to image the welding plates using a single CMOS camera, run computer vision
algorithms and control the welding equipment. A complete prototype, using a commercial linear welding
robot is presented. The evaluation of the system as a groove mapping equipment, considering different pro-
cessing algorithms combined with noise removal and line segment detection techniques, allows us to define
the appropriated approach for shop floor operation, combining low asymptotic cost and measurement quality.
1 INTRODUCTION
Welding is a fundamental task in the heavy steel in-
dustry. Its automation is required in order to keep
pace with the demanding and competitive market.
The manual welding process affects directly the qual-
ity of the weld - it is very common to have rework
due to bad quality welds (Ang Jr et al., 1999). To exe-
cute GMAW (Gas Metal Arc Welding) tasks, involv-
ing linear steel plates, the welding gun has to perform
a longitudinal movement while following the groove
between the plates that are being welded. Human
operated robots are often used to carry the welding
gun. The control parameters of the welding equip-
ment have to be continuously adjusted during the op-
eration. The parametrization demands constant atten-
tion and skill of the welding professionals exposing
them a harsh and unhealthy conditions.
The overall quality of electric arc welds is highly
dependent on the equipment configuration: voltage,
current, tractor speed, torch positioning, wire feeding
speed and torch weaving, among other parameters.
When not properly adjusted, this may result in plate
warping, weld spatter, weld slags and fume. Provid-
ing a higher level of control for the process is a way
to improve the weld quality and avoid rework. It is
necessary to implement a system capable of finding
the best parameters settings for each welding opera-
tion and automate the most critical parts of the pro-
cess. This can be achieved using algorithmic tech-
niques making the welding process less dependent of
the human interaction. In order to achieve this, dif-
ferent techniques can be used depending on the avail-
able hardware - sensor and data acquisition system -
and cost. We can highlight three main approaches. A
combination of structured illumination laser and cam-
era, as used in (Kawahara, 1983), (Drews et al., 1986),
(Liu, 2010), (Zhang et al., 2014) and (De Xu, 2004);
a touch sensor based approach as in (Kim and Na,
2000) or, a last case, where the arc current feedback
is explored, as in (Dilthey and Gollnick, 1998) and
(Halmøy, 1999).
The technology has led to a scenario where it is
possible to use automated robotic systems to optimize
tasks and achieve higher efficiency, productivity and
quality, as well as reduce operational costs and re-
work. Furthermore, the use of robots is recommended
for tasks that are taken in hazardous environment or
characterize as laborious and repetitive.
Moreover, the advances in both hardware and soft-
ware technologies enable the development of cheaper,
faster, higher quality and smaller cameras and elec-
tronic devices. Therefore, vision based methods have
become a viable option, combining image acquisition
with an operations unit, where algorithms are used to
extract useful information. (Shirmohammadi and Fer-
326
Steffens, C., Leonardo, B., Filho, S., Huttner, V., Rosa, V. and Botelho, S.
Welding Groove Mapping - Implementation and Evaluation of Image Processing Algorithms on Shiny Surfaces.
DOI: 10.5220/0005709103240332
In Proceedings of the 11th Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2016) - Volume 3: VISAPP, pages 326-334
ISBN: 978-989-758-175-5
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
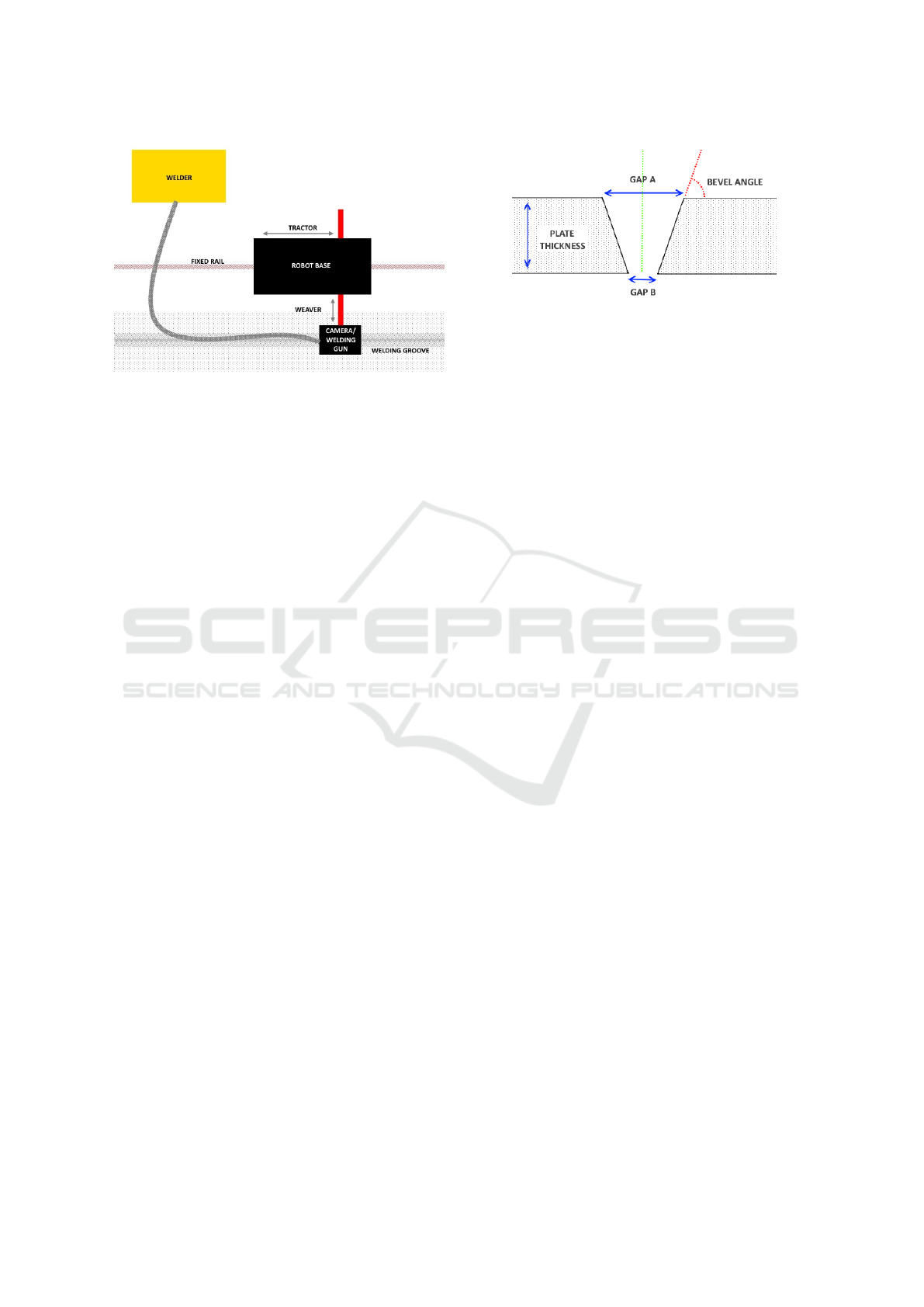
Figure 1: Typical linear welding robot installation.
rero, 2014) argues that, besides the level of automa-
tion, Vision-Based Measurement (VBM) is typically
faster and more accurate than manual or human based
techniques, once it uses electronic devices and com-
putational intelligence.
Imaging a metallic surface, however, is a chal-
lenge. This paper proposes a VBM system to recog-
nize the groove geometry for a robotic welding pro-
cess. Hardware and software are combined to map
the welding groove geometry providing the neces-
sary data to adjust the control settings of the weld-
ing equipment. A number of alternatives is tested
to evaluate the capabilities and impacts of each algo-
rithm choice. Multi-exposure composition is consid-
ered as an alternative to obtain non-saturated images
of the shiny and reflective surface. The system is im-
plemented on top of a Bug-O Matic Weaver welding
robot, manufactured by Bug-O Systems International,
using an Altera DE0-Nano FPGA board and a Terasic
D5M 5 megapixel camera.
2 LINEAR WELDING
ARCHITECTURE
Figure 1 presents a typical setup used on linear weld-
ing of thick steel plates employing a welding robot to
carry the welding gun. The robot runs on a rail that is
fixed to the floor or any other plane surface. The rail
is usually parallel to the welding groove that is be-
ing welded. The welding equipment is neither a part
nor is it dragged by the robot. In a typical scenario,
the robot is solely used to drag the welding gun with
controlled speed an weaving.
Depending on the groove properties (see Figure
2), the weaver and tractor are combined to produce
different weld patterns (a.k.a Oscillation Regime):
• Continuous: the robot travels continuously over
the rail both during weave and dwell;
Figure 2: Welding groove properties.
• Step: the robot travels only during dwell, and
stops during the Weaver cross stroke;
• Tractor Stop on Dwell: robot travels on the rail
during weave stroke. Tractor and Weaver stop
during dwell;
• Line or Stringer Bead: weaver is turned off;
In our approach, a lighting system and camera
equipment are attached to the welding gun mounting
point. The robot control is mapped and modified to
enable an automated control of the tractor and weaver,
allowing us to adjust the camera position while the
robot travels over the entire rail, and thus map the
welding groove properties.
3 A VISION BASED APPROACH
FOR WELDING GROOVE
MEASUREMENT
A VBM system usually consists of a visual sensor
plus operations unit (Figure 3 gives an overview of
the VBM system). The visual sensor can be a cam-
era, laser scanner, x-ray scanner, or any other sensor
which an image of the physical scene containing the
measurand can be obtained, and the operations unit
can be implemented in software or hardware (Shir-
mohammadi and Ferrero, 2014).
3.1 Image Aquisition
Figure 4 gives an overview on the proposed image
acquisition setup. Proper choice of lighting, camera
and lens are keys to any successful VBM system de-
sign. For our application, they become even more im-
portant once the steel or iron plates can present both
specular and diffuse reflection and the amount of light
that is reflected is also highly affected by the plate
oxidation or dust. Therefore, a lighting system has
been designed to enhance the groove properties. It
uses an arrangement of LEDs (Light-Emitting Diode)
positioned beside the camera.
Welding Groove Mapping - Implementation and Evaluation of Image Processing Algorithms on Shiny Surfaces
327

Figure 3: High-level architecture of a Vision-Based Measurement system.
Figure 4: Image Acquisition setup.
On a pinhole camera, assuming that a fixed work-
ing distance will be ensured on the setup steps, the
Horizontal Field of View is given by Eq. 1, where
W D is the distance from the lens front principal plane
to the object plane and AFOV is the Angular Field of
View of the lens.
HFOV [mm] = 2 ·WD ·tan
AFOV [
◦
]
2
(1)
The lens experiences greater magnification as the
object distance from the lens changes. Since the top
and bottom faces of the welding plate have a different
W D the pixel to metric unit conversion has to consider
that difference when computing the groove width and
bevel angle. The scale factor S is given by Eq. 2,
where d
ob ject
is the physical dimension of a given ob-
ject in millimeters and d
image
is the size of the corre-
spondent object on the image in pixels.
S[mm/pixel] =
d
ob ject
d
image
(2)
Raw data is obtained from the Bayer-filter CMOS
sensor and converted to a grayscale image. Metallic
surfaces introduce some difficulties that are not yet
resolved in the literature. They differ from standard
rigid structured, non-reflective surfaces that computer
vision usually deals with. Slight changes on the illu-
mination, camera movement, parent material oxida-
tion or dust often produce extreme differences in radi-
ance values that are impossible to capture without ei-
ther under-exposing or saturating the sensor. Standard
image processing operations expect pixel values to be
proportional to the scene radiance. Due to nonlinear
image response these operations often produce incor-
rect results for conventional images. Therefore, from
this point, taking advantage of the low level control
provided by the customised hardware, we have tested
two different alternatives for the image acquisition.
1. Single frame capture using fixed exposure time:
a exposure time that is at the center of the range
the camera supports is used. It provides reason-
able visibility of the details in the scene for most
cases. The image is normalized and the histogram
is equalized.
2. Multi-exposure image composition: The exposure
time is controlled to obtain k images of the exact
same place. Multi-exposure composition, as pro-
posed in (Debevec and Malik, 2008), is used to
obtain a High Dynamic Range (HDR) image. The
HDR image is latter normalized to a 2
8
range, so it
can be used as input on standard image processing
techniques as they are implemented in OpenCV
3.0. On the same hand, normalizing the pixel val-
ues to a lower range also works as a low pass filter,
removing noisy pixels.
3.2 Operations Unit
The proposed system uses image processing and ma-
chine vision to detect the welding groove’s proper-
ties. The groove is modeled as a set of almost parallel
lines on the image. As the system is implemented in
hardware, the algorithms must be carefully selected to
maximize the accuracy and performance levels.
3.2.1 Noise Removal
We apply a gaussian unsharp mask to enhance the
high frequency regions present at the groove edges.
VISAPP 2016 - International Conference on Computer Vision Theory and Applications
328

(a) HDR Input images
(b) Single Exposure (c) HDR composition
(d) Line Segment detection (e) Final groove modeling
Figure 5: Processing in the VBM system.
While it improves the overall contrast, it also accen-
tuates the small failures and aberrations that are al-
ready on the captured image. Therefore, a noise re-
moval step is necessary. For the noise removal step
test three filters: a mean box filter, a median filter and
a gaussian filter. Gaussian and mean filters have a lin-
ear computational complexity, but both of them work
as low-pass filters, which might be a drawback given
that edges perform an important rule on the groove
detection. The classic median filter has a O(nlog(n))
complexity, once, by definition it requires the pixels
in the neighbourhood to be ordered by their value.
Optimized approaches, as presented in (Perreault and
H
´
ebert, 2007), can bring it down to O(n).
3.2.2 Straight Line Detection
The camera position is orthogonal to the observed sur-
face. Once the image is preprocessed we can now
work on the line detection to determine the groove
properties. Among previous approaches that focus
on standardized computer vision algorithms, such as
(Ma et al., 2010), (Hou and Liu, 2012) and (Xu et al.,
2012), the combination of a Canny edge detector and
a Hough transform is the most recurrent alternative.
In order to identify the straight lines the Hough trans-
form associates to each pixel on a input image, in a
polar geometry space, to the bundle of lines passing
through it.
However, as we intend to implement the ma-
chine vision step on a low cost equipment with real-
time performance, we have to consider the algorithms
complexity and use a solution that maximizes the
asymptotic cost/ output quality ratio. Although it is
non-deterministic, it has been evidenced in (Risse,
1989) and latter in (Hollitt, 2009) that the computa-
tional cost of the Canny edge detection plus the cost of
the classical Hough line transform can be over O(n
4
),
where n is the number of pixels in the analysed im-
age. Using some simplification steps, authors were
able to reduce the complexity down to O(n
3
log n)
(Hollitt, 2009), which we believe is still not appro-
priated for the system restrictions. Besides its com-
plexity, the Canny edge detector also depends on pre-
defined threshold values. Therefore, four alternative
algorithms were evaluated:
• PPHT – Progressive Probabilistic Hough Trans-
form for Line Detection (Galamhos et al., 1999):
It is non-deterministic like the standard Hough
transform itself. Considering its enhanced voting
scheme we tested it expecting it to be less suscep-
tible to random noise.
• Fast LSD (Von Gioi et al., 2012): LSD works
with gray scale images detecting lines formed by
edges. The LSD was designed with the intention
of not requiring parameters adjustment. It has a
O(nlog(n)) asymptotic complexity.
• EDLines (Akinlar and Topal, 2011): It is parame-
terless and has a O(nlog(n)) asymptotic complex-
ity. It works upon the Edge Drawing algorithm
(Topal et al., 2010) that uses Sobel gradient filters
to replace the classic Canny filters.
• LSWMS – Line Segment Detection Using
Weighted Mean Shift (Nieto et al., 2011): De-
signed to detect line segments in real-time appli-
cations, the algorithm has a O(n) complexity. Au-
thors agree it generates noisy results, but recom-
mend it for application like vanishing point de-
tection because it provided enough accuracy and
great speed.
3.2.3 Heuristics
Once we know the possible groove edges, a greedy
Non-Maximum Suppression algorithm is used to sep-
arate false positives and negatives that still remain
after the image processing. To determine the point
that better represents the groove edges on the image,
Welding Groove Mapping - Implementation and Evaluation of Image Processing Algorithms on Shiny Surfaces
329

the endpoints of the line segments are interpolated
and combined to form a histogram of the aggregated
values in the image row axis. Using the application
domain information we can establish some threshold
values to filter the outputs of the vision algorithms.
For instance, it is known the steel plates thickness
can vary from 13mm up to 20mm and groove an-
gle can vary within 45-55
◦
. Also a restriction of the
application domain, the Gap B, on the plate bottom,
has to be something between 3mm and 9mm. Pixel
to millimeter conversion and world position associa-
tion achieved via encoder based dead-reckoning com-
plete the mapping, supporting the decision making
and welding equipment actuation.
4 IMPLEMENTATION
The VBM system has been implemented as a mod-
ule to replace the original Control Unit of the BUG-O
modular system. The digital system features a FPGA
based hardware/software architecture. The main goal
of using a FPGA system instead of a standard com-
puter is the customization level and integration of the
hardware/software solution that can be obtained. The
DE0-Nano board, manufactured by Altera Corpora-
tion, was chosen due to their low cost, high number of
logic cells and digital I/O pin count, integrated flash
memory, RAM, and 12-bit A/D conversion. Further-
more the DE0-Nano is pinout compatible with the
D5M camera module, simplifying the electronic de-
sign. The electronic interfaces were developed using
low cost off-the-shelf integrated and discrete compo-
nents for signal conditioning.
Both the image acquisition system and the weld-
ing torch are mounted on the end-effector of the robot.
A Terasic D5M camera is used for image acquisi-
tion. It features a single package containing sensor
and lens. Table 1 shows its specification considering
a full resolution image capture according to the manu-
facturer. Once we crop the image for our application,
the angular field of view is reduced in the same ratio.
A LED illumination circuit has been created to
provide an adequate homogeneous illumination and
minimize the influence caused by changes of ambient
light. For the image acquisition a CMOS camera has
been used. The operations unit, as well as the light
control and image acquisition, is implemented on the
FPGA development board , which is responsible for
receiving the image acquired by the visual sensor, per-
forming the image processing and the adjustment of
the robot’s and welder’s parameters in real time.
The raw data acquisition and basic image process-
ing are performed on the FPGA board taking advan-
Table 1: Terasic D5M Sensor and Optics Specification.
Specification Value
Sensor Active Array Size 2592 x 1994
Image Size 5.7mm(H) x 4.28mm(V)
Pixel Size 2.2µm x 2.2µm
Focal Lenght 7.12mm
Fixed Aperture F/3.25 (± 5%)
Angular Field Of View 55
◦
Relative Illumination ≥ 65.0%
Barrel Distortion ≤ 1.0%
tage of the embedded Altera’s Nios
r
II processor.
A SDRAM memory is used to create a frame buffer.
The image is sent, without compression, to a standard
PC via Universal Asynchronous Receiver/Transmitter
(UART) and a USB FTDI breakout port. Camera
and robot control instructions are sent via Modbus
RTU serial communication protocol with 921600 of
baudrate. Noise suppression and straight line detec-
tion steps are executed on a C++ OpenCv version
3.0 based software. We use the code made avail-
able by the authors for the LSWMS algorithm and
Fast LSD. The EDLines algorithms is implemented
“in house” since the authors do not make it publicly
available. Non-maximum suppression and heuristics
are used to identify the welding groove parameters.
The processed data is then used to control the robot
and welder.
The system is integrated with a reliable and widely
accepted industrial robot. Encoders are used as
odometer sensors (dead reckoning) of the tractor and
weaver arm. The data is decoded using an 8-bit
quadrature decoder module designed in VHDL. Both
tractor and weaver speed setpoints are calculated us-
ing a ∆Σ module with 12 bit resolution.
A Lincoln Electric Flextec
TM
450 Multi-Process
Welder is used. It is able to perform stick, DC TIG,
MIG, Flux-Cored, Arc Gouging welds. For our appli-
cation, the original user interface is replaced to use
the digital input provided by the VBM system. A
sample of the relationship between the grove geom-
etry and the equipment controls is shown in Table 2.
These settings have been carefully defined by weld-
ing specialists at Mitsubishi Heavy Industries. The
oscillation regime defines the behaviour of the pendu-
lum extension and the weaving amplitude. Depending
on the groove properties it can require up to 4 layers
of weld. Electrode diameter, electrode extension and
gun position are predefined by the welder. The os-
cillation regime (OR) is a preset that combines the
robot’s tractor and weaver, with a specific speed and
distance, to result in different weld patterns.
An overview of the digital control system is shown
in Figure 6. The central controller is the main unit in
the system. All the tasks involving the control and
VISAPP 2016 - International Conference on Computer Vision Theory and Applications
330
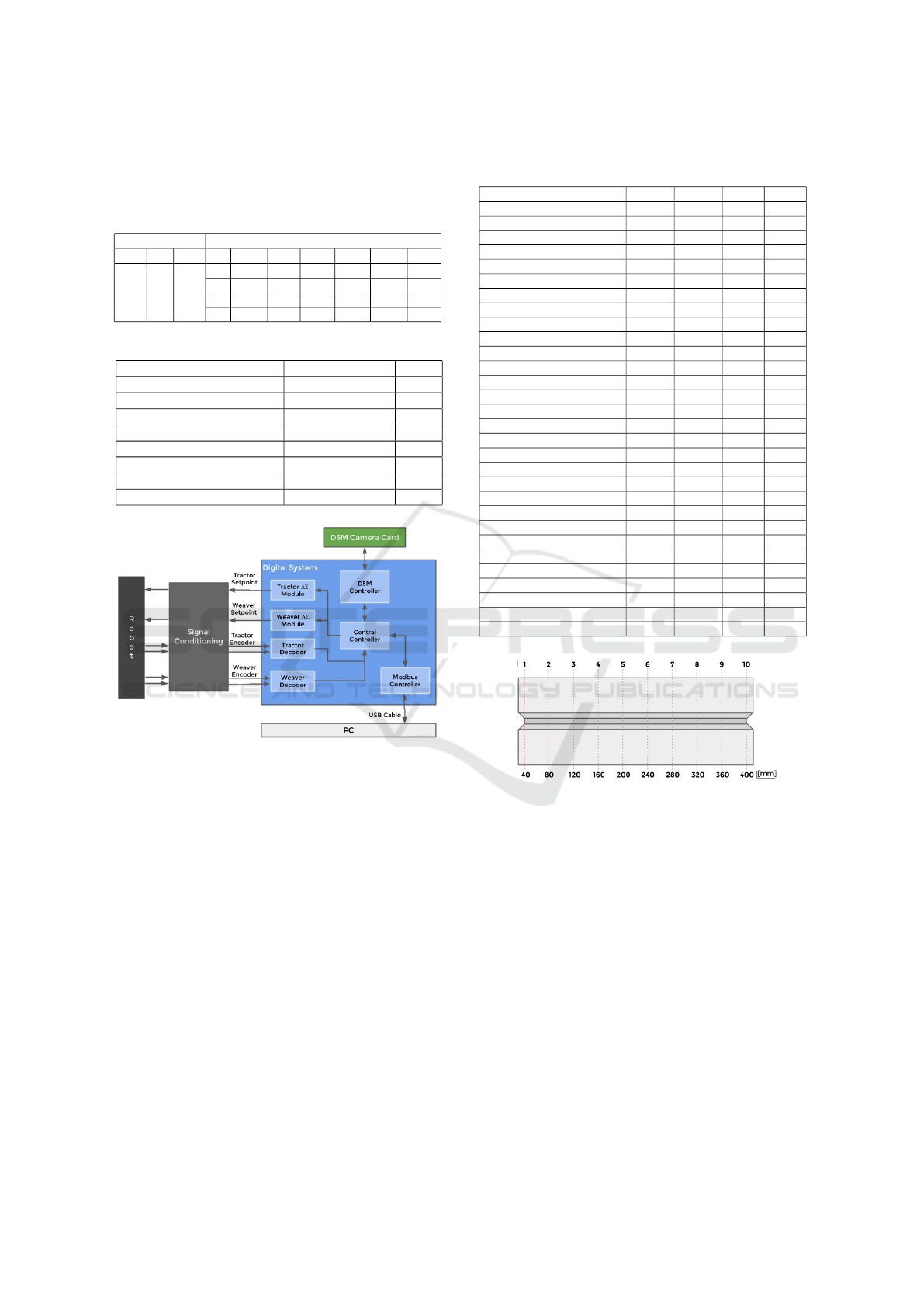
Table 2: Sample of the geometry to welder control mapping.
Legend: PT – Plate Thickness [mm]; G – Gap B; B
o
– Bevel
Angle [
o
]; WS – Weld Speed [mm/min]; TS – Tractor Speed
[%]; LH – Layer Height [mm]; OR – Oscillation regime;
WF – Wire Feed Speed [m/min]; A – Current [A].
Groove Prop. Equipment Settings
PT G B
o
L WS TS LH OR WF A
13 3 45
1 450 64 3 a 14 6.2
2 340 49 5 a 14 6.2
3 330 75 3 b 14 6.2
4 320 75 3 b 14 6.2
Table 3: Compilation report.
Specification Description Used
FPGA Device EP4CE22F17C6 –
Total Logic Elements 5.916 27%
Combinational Functions 5.380 24%
Dedicated logic registers 3.152 14%
FPGA PLLs 1/4 24%
I/O pins (external) 96 62%
Embedded Multiplier 9-bit 0 0%
Total memory bits 42.992 7%
Figure 6: Overview of Digital Control System.
parametrization of the camera, sending or receiving
data via modbus and ∆Σ module are controlled in this
component. The execution order is to read all the
data signals from the decoders and read any message
driven from the modbus component, based on that
take actions such as start or stop the camera acquisi-
tion or move the robot using the tractor or weaver ∆Σ
module. The project is designed in Altera’s develop-
ment platform tool Quartus II. The compilation report
presented in Table 3, showing the relative occupation
of its resources.
5 EXPERIMENT RESULTS
The proposed VBM system is evaluated as a mea-
suring equipment considering both measurement er-
ror and measurement uncertainty. According to the
GUM (BIPM et al., 2008), the purpose of a measure-
Table 4: Measurement Evaluation. Values in millimeters.
Lower error and standard deviation is better.
¯
E A σ A
¯
E B σ B
Gauss + EDLines 0.407 0.370 1.071 0.407
Mean + EDLines 0.340 0.383 0.961 0.739
Median + EDLines 0.344 0.290 1.002 0.505
Gauss + LSWMS 1.204 2.197 0.933 0.797
Mean + LSWMS 0.367 0.389 0.842 1.134
Median + LSWMS 1.548 2.640 1.066 1.123
Gauss + PPHT 12.053 10.312 4.506 2.657
Mean + PPHT 0.424 0.392 1.225 0.417
Median + PPHT 3.267 6.380 1.559 1.304
Gauss + Hough 19.916 0.000 6.558 0.000
Mean + Hough 17.963 6.176 5.976 1.838
Median + Hough 16.001 8.470 5.429 2.391
Gauss + LSD 0.143 0.084 0.780 0.157
Mean + LSD 0.306 0.298 0.902 0.380
Median + LSD 0.241 0.257 1.056 0.442
HDR + Gauss + EDLines 1.110 2.249 1.327 0.670
HDR + Mean + EDLines 0.359 0.399 0.731 0.505
HDR + Median + EDLines 0.254 0.190 0.912 1.188
HDR + Gauss + LSWMS 1.586 2.406 0.678 0.680
HDR + Mean + LSWMS 1.119 1.945 0.970 0.772
HDR + Median + LSWMS 1.511 2.299 0.912 0.800
HDR + Gauss + PPHT 19.916 0.000 6.558 0.000
HDR + Mean + PPHT 0.242 0.112 0.763 0.296
HDR + Median + PPHT 0.294 0.228 1.054 0.780
HDR + Gauss + Hough 19.916 0.000 6.558 0.000
HDR + Mean + Hough 17.920 6.327 5.908 2.054
HDR + Median + Hough 10.107 10.346 3.618 3.105
HDR + Gauss + LSD 0.358 0.388 0.985 0.420
HDR + Mean + LSD 0.364 0.355 0.697 0.477
HDR + Median + LSD 0.345 0.302 0.782 0.485
Figure 7: Groove unit separation in 40mm each.
ment is to determine the value of the measurand, i.e.,
the value of the particular quantity to be measured.
A complete measurement is taken by an appropriate
specification of the measurand, the method of mea-
surement, and the measurement procedure. Gener-
ally, the result of a measurement is only an approx-
imation or estimate of the value of the measurand and
thus is complete only when accompanied by a state-
ment of the uncertainty of that estimate.
The groove is measured using a caliper rule with
three digits decimal precision, at a temperature of 20
◦
Celsius. A 400mm specimen is used to obtain 10
sample points, separated 40mm from each other as
shown in Fig. 7. The robot is programmed to fol-
lows the groove stopping at each sample point. At
each position a image is acquired and processed us-
ing 30 combinations of noise removal filters and line
Welding Groove Mapping - Implementation and Evaluation of Image Processing Algorithms on Shiny Surfaces
331

Figure 8: Average error and standard deviation of the mea-
sured values on the top of the plate (Gap A). Values in mil-
limeters.
segment detection algorithms. The task is completed
after the entire plate is mapped. It is important to note
that the samples 6, 7, 8, and 9 where obtained on a
recently polished part, which consequently presents
more specular reflection.
We used a 5 pixels kernel for all the noise sup-
pression filters. The gaussian filter uses a 0.7 standard
deviation. The Canny minimal an maximal threshold
values are set to 100 and 200 respectively. The Hough
transform uses a L
1
norm. On images were one of the
lines failed to be detected, Gap A and Gap B were
considered as 0. Fig. 8 shows the Gap A (plate top)
values measured by the VBM system for the 10 sam-
ples of the welding plate. Fig. 9 shows the Gap B
(plate bottom) values measured for the same samples.
Table 4 allows us to compare the ground truth with
the VBM system measurements, showing the average
value and distribution. The combination of median
blur and EDLines line segment detection shows the
smallest standard deviation. On the other hand, Gaus-
sian combined with EDLines presents the smallest er-
ror.
Based on the data we can state that, for these sam-
ple points, Fast LSD algorithm provides the best re-
sults. Using any of the noise suppression kernels
its standard deviation is still lower than the other
Figure 9: Average error and standard deviation of the mea-
sured values on the bottom of the plate (Gap B). Values in
millimeters.
tested combinations on both Gap A and Gap B mea-
surements. The next best solutions, which minimize
error and standard deviation are obtained using the
EDLines algorithm. As third position in the rank,
LSWMS also presents a low error, but depending on
the noise suppression choice, its standart deviation
can go over two millimeters.
It is important to note that both classic Hough
Transform and its variant PPHT perform worse than
the others. The combination of Gaussian kernel with
the classic Hough transform fails in all sample points.
Other classic Hough combinations also fail in many
of the processed images. In this sense, PPHT shows
a significant improvement. When combined with the
mean filter, it presents a very low standard deviation,
becoming a suitable option given that systemic error
can be easily compensated. It is important to note that
the Canny thresholds are a user input. Varying them
to get proper edge detection for each test point im-
age would improve the results, but that is not a viable
option when developing an automated solution.
Furthermore, the results also show the HDR com-
position does not significantly increase the output
quality. Although it reduces the standard deviation
in most cases, it increases the average error. That is
a unexpected behaviour, once we could expect the vi-
VISAPP 2016 - International Conference on Computer Vision Theory and Applications
332

sually improved images to perform better due to the
absence of saturated and underexposed regions.
Evaluating the combinations we can also make
some assumptions about the relation within filters and
line detectors. Fast LSD and EDLines are little af-
fected by the kernel choices. In both single exposure
images and multi-exposure composed images, the re-
sults change less than 100 nanometers. LSWMS is af-
fected by the filter type when applied to HDR images.
Hough and PPHT, in the other hand, are highly af-
fected by the filter choice. Using a Gaussian low pass
filter reduces the detection rate, making the detector
fail in all cases. The median filter, also increases error
and variation, making the mean filter the best option.
Finally, the experiment results show that, even
though it is widely used in academic research, the
Hough transform can be replaced by modern, state-
of-the-art algorithms, improving both detection qual-
ity and computational complexity bounds.
6 CONCLUSIONS AND FUTURE
WORK
We present a system that integrates different tech-
niques to perform dimensional measurement of thick
steel plate bevels. We show how, using domain
knowledge, the extracted dimensions can be mapped
in control settings for the robotic welding equipment.
Unlike the previous approaches, it does not rely on
a single moving spot like laser trackers, nor a pat-
tern of spots like optical contact systems, neither a
line like laser scanners. No structured light or polar-
ized lenses are used. The approach is based on image
acquisition and processing making use of computer
vision algorithms. The groove modeling is achieved
through the use of line detection algorithms that look
for straight lines and segments. State-of-the-art al-
gorithms, such as Debevec’s HDR composition, Fast
LSD, PPHT, LSWMS and EDLines were tested on
real data to evaluate their capabilities.
Experimental results demonstrated that, using
carefully selected algorithm combinations, the system
can successfully extract the measurand dimensions.
The proposed approach has evident advantages over
the manual process that is used in shop floor nowa-
days, given that it can yield a large number of fea-
tures in a very short time using state of the art algo-
rithms, is not susceptible to the most frequent mea-
surement error sources and automatically controls the
welding equipment settings. In the same hand, we
also demonstrated obsolete and non-deterministic al-
gorithms could be replaced by state-of-the art alterna-
tives achieving better results at lower computational
cost.
We will be further exploring lighting options,
noise suppression algorithms and image composition
techniques to test how the achieved results can be im-
proved to surpass the precision requirements of the
welding industry. Previous studies have shown the
impact of illumination wavelength on enhancing or
suppressing desired properties on the image surface.
We believe it might also impact the image acquisition
on reflective surfaces. On the same hand, bilateral
filtering and image smoothing via L0 gradient mini-
mization (Xu et al., 2011), which have not been tested
yet due to their computational complexity bounds and
inability to perform in real-time on the proposed hard-
ware architecture, will be included in the compari-
son. Furthermore, Debevec’s multi-exposure image
composition will be compared to other recent ap-
proaches that minimize the computational cost and
are hardware-friendly.
In the long term, machine learning and deep learn-
ing will be used to extract information of the pro-
cess and produce a general purpose welding work-
cell. Therefore it must be able to identify the ma-
terial and it’s conditions; the environment variables
such as wind and humidity and incorporate the knowl-
edge that only experienced weldors today have. Stud-
ies have already been realized to map the main differ-
ences among senior and novice weldors and we intend
to use them to elevate the overall quality of the weld-
ing process.
ACKNOWLEDGEMENTS
This work was supported by National Counsel of
Technological and Scientific Development (CNPq),
Coordination for the Improvement of Higher Educa-
tion Personnel (CAPES) and Funding Authority for
Studies and Projects (FINEP).
REFERENCES
Akinlar, C. and Topal, C. (2011). Edlines: A real-time line
segment detector with a false detection control. Pat-
tern Recognition Letters, 32(13):1633–1642.
Ang Jr, M. H., Lin, W., and Lim, S.-Y. (1999). A
walk-through programmed robot for welding in ship-
yards. Industrial Robot: An International Journal,
26(5):377–388.
BIPM, I., IFCC, I., ISO, I., and IUPAP, O. (2008). Evalua-
tion of measurement data – guide to the expression of
uncertainty in measurement.
De Xu, Min Tan, X. Z. Z. T. (2004). Seam tracking and
visual control for robotic arc welding based on struc-
Welding Groove Mapping - Implementation and Evaluation of Image Processing Algorithms on Shiny Surfaces
333

tured light stereovision. International Journal of Au-
tomation and Computing, 1(1):63.
Debevec, P. E. and Malik, J. (2008). Recovering high dy-
namic range radiance maps from photographs. In
ACM SIGGRAPH 2008 classes, page 31. ACM.
Dilthey, U. and Gollnick, J. (1998). Through the arc sens-
ing in gma-welding with high speed rotating torch. In
Industrial Electronics Society, 1998. IECON’98. Pro-
ceedings of the 24th Annual Conference of the IEEE,
volume 4, pages 2374–2377. IEEE.
Drews, P., Frassek, B., and Willms, K. (1986). Optical
sensor systems for automated arc welding. Robotics,
2(1):31–43.
Galamhos, C., Matas, J., and Kittler, J. (1999). Progres-
sive probabilistic hough transform for line detection.
In Computer Vision and Pattern Recognition, 1999.
IEEE Computer Society Conference on., volume 1,
pages –560 Vol. 1.
Halmøy, E. (1999). Simulation of rotational arc sensing
in gas metal arc welding. Science and Technology of
Welding & Joining, 4(6):347–351.
Hollitt, C. (2009). Reduction of computational com-
plexity of hough transforms using a convolution
approach. In Image and Vision Computing New
Zealand, 2009. IVCNZ’09. 24th International Confer-
ence, pages 373–378. IEEE.
Hou, X. and Liu, H. (2012). Welding image edge detection
and identification research based on canny operator.
In Computer Science & Service System (CSSS), 2012
International Conference on, pages 250–253. IEEE.
Kawahara, M. (1983). Tracking control system using image
sensor for arc welding. Automatica, 19(4):357–363.
Kim, C. H. and Na, S. J. (2000). A study on rotating arc
using hollow shaft motor. Journal of Korean Welding
Society, 18:589–594.
Liu, X. (2010). Image processing in weld seam tracking
with laser vision based on radon transform and fcm
clustering segmentation. ICICTA, pages 470–473.
Ma, H., Wei, S., Sheng, Z., Lin, T., and Chen, S. (2010).
Robot welding seam tracking method based on pas-
sive vision for thin plate closed-gap butt welding.
The International Journal of Advanced Manufactur-
ing Technology, 48(9-12):945–953.
Nieto, M., Cuevas, C., Salgado, L., and Garc
´
ıa, N. (2011).
Line segment detection using weighted mean shift
procedures on a 2d slice sampling strategy. Pattern
Analysis and Applications, 14(2):149–163.
Perreault, S. and H
´
ebert, P. (2007). Median filtering in con-
stant time. Image Processing, IEEE Transactions on,
16(9):2389–2394.
Risse, T. (1989). Hough transform for line recognition:
complexity of evidence accumulation and cluster de-
tection. Computer Vision, Graphics, and Image Pro-
cessing, 46(3):327–345.
Shirmohammadi, S. and Ferrero, A. (2014). Camera as
the instrument: the rising trend of vision based mea-
surement. Instrumentation & Measurement Magazine,
IEEE, 17(3):41–47.
Topal, C., Akınlar, C., and Genc¸, Y. (2010). Edge drawing:
a heuristic approach to robust real-time edge detec-
tion. In Pattern Recognition (ICPR), 2010 20th Inter-
national Conference on, pages 2424–2427. IEEE.
Von Gioi, R. G., Jakubowicz, J., Morel, J.-M., and Randall,
G. (2012). Lsd: a line segment detector. Image Pro-
cessing On Line, 2(3):5.
Xu, L., Lu, C., Xu, Y., and Jia, J. (2011). Image smoothing
via l 0 gradient minimization. In ACM Transactions
on Graphics (TOG), volume 30, page 174. ACM.
Xu, Y., Yu, H., Zhong, J., Lin, T., and Chen, S. (2012).
Real-time seam tracking control technology during
welding robot gtaw process based on passive vision
sensor. Journal of Materials Processing Technology,
212(8):1654–1662.
Zhang, L., Ke, W., Ye, Q., and Jiao, J. (2014). A novel laser
vision sensor for weld line detection on wall-climbing
robot. Optics & Laser Technology, 60:69–79.
VISAPP 2016 - International Conference on Computer Vision Theory and Applications
334
