
3D Human Poses Estimation from a Single 2D Silhouette
Fabrice Dieudonn
´
e Atrevi, Damien Vivet, Florent Duculty and Bruno Emile
Univ. Orl
´
eans, PRISME, EA 4229, F45072, Orl
´
eans, France
Keywords:
Pose Estimation, 3D Pose, 3D Modeling, Skeleton Extraction, Shape Descriptor, Geometric Moment,
Krawtchouk Moment.
Abstract:
This work focuses on the problem of automatically extracting human 3D poses from a single 2D image. By
pose we mean the configuration of human bones in order to reconstruct a 3D skeleton representing the 3D
posture of the detected human. This problem is highly non-linear in nature and confounds standard regres-
sion techniques. Our approach combines prior learned correspondences between silhouettes and skeletons
extracted from 3D human models. In order to match detected silhouettes with simulated silhouettes, we used
Krawtchouk geometric moment as shape descriptor. We provide quantitative results for image retrieval across
different action and subjects, captured from differing viewpoints. We show that our approach gives promising
result for 3D pose extraction from a single silhouette.
1 INTRODUCTION
Recognizing human actions is really challenging for
computer vision scientists and researchers since the
last two decades (Wang et al., 2011). Nevertheless,
human action recognition systems have a lot of pos-
sible applications in surveillance, pedestrian tracking
and Human Machine Interaction (Aggarwal and Cai,
1999). Human pose estimation is a key step to action
recognition.
A human action is often represented as a succession
of human poses (Wang et al., 2013). As these poses
could be 2D or 3D, so estimating them have attracted
a lot of attention. A 2D pose is usually represented
by a set of joint locations (Yang and Ramanan, 2011)
whose estimation remains challenging because of the
human body shape variability, viewpoint change, etc.
Considering 3D pose, we usually represent it by a
skeleton model parameterized by joint locations (Tay-
lor, 2000) or by rotation angles (Lee and Nevatia,
2009). Such representation has the advantage to
be Viewpoint-invariant however, estimating 3D poses
from a single image still remains a difficult problem.
The reasons are multiple. First, multiple 3D poses
may have the same 2D pose reprojection. Second,
3D pose is inferred from detected 2D joint locations
so 2D pose reliability is essential because it greatly
affects skeleton estimation performance. In camera
network used in a video-surveillance context, image
quality is often poor making 2D joint detection a dif-
ficult task, moreover camera parameters are unknown
making the correspondence 2D/3D difficult.
In this work we propose a new technique for the ex-
traction of 3D skeleton pose assumptions from a sin-
gle 2D image based on the silhouette shape recogni-
tion. This technique is based on the use of a 3D hu-
man pose and action simulator. A silhouette database
is constructed from this simulator and is used in order
to match nearest silhouette and as a results possible
3D human pose.
This article presents a silhouette shape description
and comparison between different subjects and action
steps and show that we can obtain 3D skeleton con-
figuration by using only a single 2D silhouette detec-
tion. Section 2 presents related works in the human
skeleton and action recognition. Section 3 presents
the global framework of the method and the 3D sim-
ulation used. Section 4 deals with Krawtchouk shape
descriptors applied to human silhouettes. Finally, sec-
tion 3.1 and 5 present the databases and the obtained
results.
2 RELATED WORKS
There are many methods in the state-of-the-art that
deals with the human pose estimation and action
recognition. Nevertheless, these tasks are still chal-
lenging for computer vision community. Human
activity analyses started with O’Rourke and Badler
Atrevi, F., Vivet, D., Duculty, F. and Emile, B.
3D Human Poses Estimation from a Single 2D Silhouette.
DOI: 10.5220/0005711503610369
In Proceedings of the 11th Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2016) - Volume 4: VISAPP, pages 361-369
ISBN: 978-989-758-175-5
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
361

(O’Rourke et al., 1980) and Hogg (Hogg, 1983) in the
eighties. Since last decades scientists proposed many
approaches. We can categorize these approaches into
two main categories: on one hand the methods using
3D information and on the other hand technics using
only 2D data.
Most of the approaches use a 3D model or 3D detec-
tion for estimating the pose of a subject and for action
classification. Rehg and Kanade (Rehg and Kanade,
1994) presented a 3D model-based hand tracking sys-
tem that can cover the state of a 27 DOF skeleton.
Gavrial and al.(Gavrila and Davis, 1996) used a 3D
model-based tracking of unconstrained human move-
ment. They used some sequence images acquired
from multiple views for recovering 3D body pose of
a human.
Bourdev and Malik (Bourdev and Malik, 2009) esti-
mated the human pose from key points. They used a
data set of annotations of human with 3D joins infor-
mations inferred using anthropometric constraints for
human action classification (Maji et al., 2011). Hiyadi
and al. (Hiyadi et al., 2015) used the depht informa-
tion obtained from Kinect sensor and a tracking algo-
rithm for 3D human gestures recognition. Jian (Jiang,
2010) proposed an exemple-based method, based on
the kd-tree achieves real-time performance, to prune
the hypotheses. Ramakrishna and al. (Andriluka
et al., 2010) proposed a three-stage process for 3D
poses recovering in uncontrolled environment. Val-
madre and Lucey (Valmadre and Lucey, 2010) used
deterministic structure from multiple view of motion,
based on the related work of Wei and Chai (Wei and
Chai, 2009), for 3D pose estimation.
These approaches need multiple sensors or specific
devices such as time of flight or active camera for
acquiring 3D information. These models also, need
good parametrization.
The second category of approaches, to which our pro-
posed method belongs, used 2D models trained from
various images. Baumberg and Hogg (Baumberg and
Hogg, 1994) used active shape model to track pedes-
trians in real world scenes. They used the B-spline
as a shape vector for training the model. Wren and
al. (Wren et al., 1997) tracked people and interpreted
their behaviour by using a multiclass statistical model
of colour and shape to obtain 2D representation of
head and hand. Gorelick and al. (Gorelick et al.,
2005) used the solution of Poisson’s equation to ex-
tract spatiotemporal features such as the saliancy, the
orientation of the shape for action recognition and
then human pose estimation. Guo and al. (Guo et al.,
2009) used a geometrical normalized vector of dimen-
sion 13 for describing the shape of a human. Mori
and Jitendra (Mori and Malik, 2002), or Agarwal and
Triggs (Agarwal and Triggs, 2006) used the shape
context in their research on human pose estimation.
Gorce and al. (de La Gorce et al., 2011) estimated
and tracked the human hand from monocular video
through minimization of an objective function. This
minimization is done using a quasi-Newton method,
for which they provide a rigorous derivation of the ob-
jective function gradient. Yang and Ramanan (Yang
and Ramanan, 2011) estimated the pose by capturing
the orientation of each part with a mixture of tem-
plates modeled by linear SVMs. All of these methods
focus on 2D image interpretation in order to detect
human pose or action. For this purpose, learning is
requiered and such algorithms need complex and ex-
pensive systems to get the training data set with the
ground truth.
Our method is based on a very simple silhou-
ette extraction and description. We use the robust
Krawtchouk geometric moment to shape analysis in
monocular image. For the database, we proposed to
use software applications from the open source com-
munity. These softwares makes realistic simulation
of various human poses and action possible. We
have shown in this work that using 3D simulations
for learning, without complex machine learning algo-
rithm and with a simple real time shape descriptor we
can achieve 3D pose estimation on real data with good
accuracy from a unique 2D image.
3 METHODOLOGY
The proposed approach for pose estimation is based
on shape analysis of human silhouette. The method
can be decomposed into four parts: (1) simulated
silhouette and skeleton database, (2) Human detec-
tion and 2D silhouette extraction, (3) silhouette shape
matching, (4) skeleton scaling and validation. The
workflow is presented Fig.1.
(1) First, Silhouette and Skeleton Database is built
thanks to opensource 3D software (see section 3.1).
Such database is composed of human silhouettes and
its corresponding 3D skeletons for different kind of
actions we want to recognize. So, for a requested sil-
houette, it’ll be possible to find the matching silhou-
ette in the database and then the corresponding 3D
skeleton.
(2) 2D Silhouettte Detection is a well-studied field in
machine learning and computer vision. For this pur-
pose we used classical real-time approach proposed
by Dollar et al. (P. Dollar and Perona, 2010) based on
multiscale HOG (Dalal and Triggs, 2005). Once the
human silhouette is detected, we converted it in a 128
x 48 pixels image for solving the translation and scale
VISAPP 2016 - International Conference on Computer Vision Theory and Applications
362
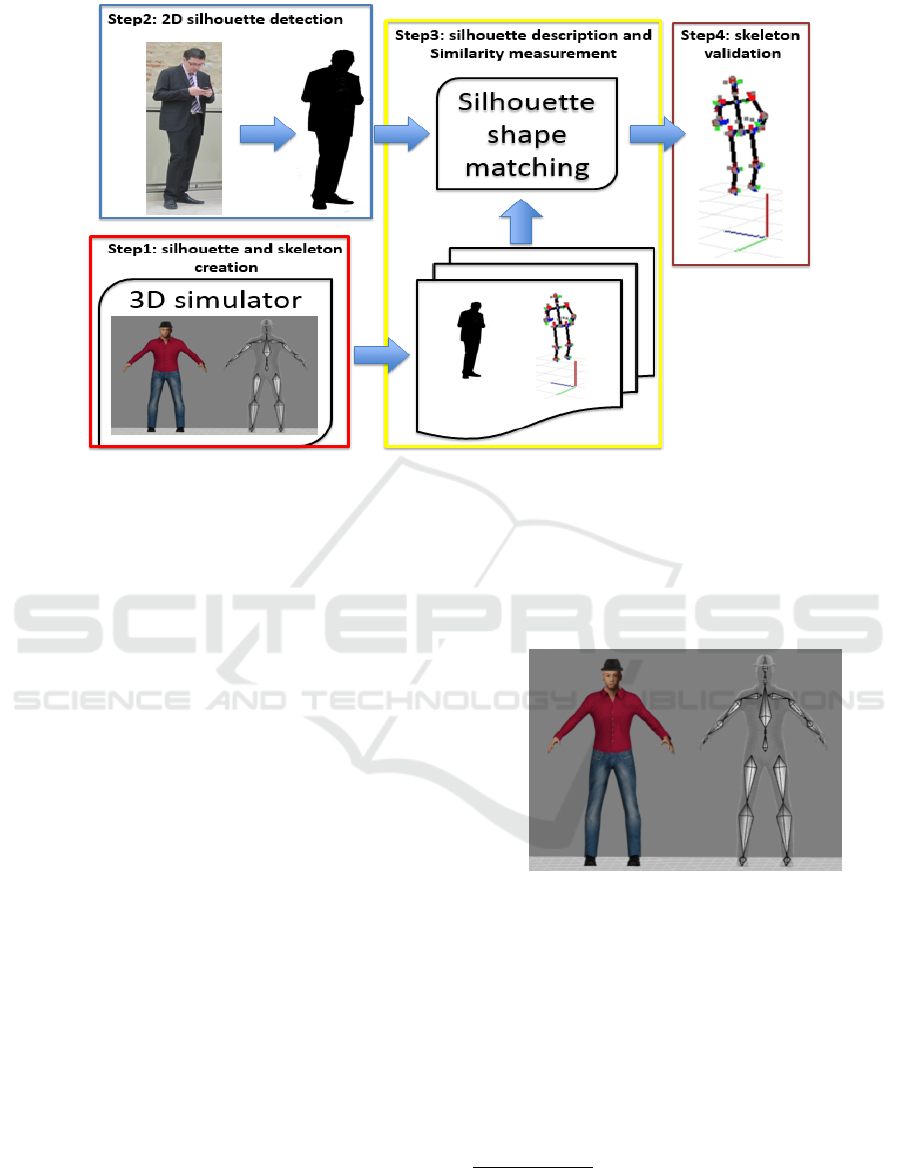
Figure 1: Human pose estimation methodology.
problem.
(3) Silhouette Description and Similarity Measure-
ment is the key point of our methodology. The main
objective is to describe accurately the shape of the sil-
houette. For this task, we used the geometric moment
of Krawtchouk because of its robustness compared to
Hu, Zernike or Shapecontext descriptors. (See sec-
tion 4) Based on this descriptor, a characteristic vector
is computed for each silhouette in the database. The
similarity between characteristic vector is measured
with the Euclidean distance given by :
d(z
r
, z
t
) =
T
∑
i=1
z
r
i
− z
t
i
2
(1)
where z
r
et z
t
is respectively the characteristic vec-
tor of request silhouette and the t th silhouette in the
database.
(4) Skeleton Scaling and Validation. For each sil-
houette we retrieve a 3D skeleton. This skeleton is
scaled to the current silhouette size. At this step we
use ground truth simulated database to valide the ap-
proach. The confidence score is process by measuring
the reprojection error of predicted joints on the silhou-
ette.
3.1 Construction of the 2D/3D
Matching Database
3.1.1 3D Human Avatar and Action Simulation
In order to build our simulated humans, we choose to
use a professional free and open-source 3D computer
graphics software called Blender
1
associated with a
free software to create realistic 3d human makehu-
man
2
(see Fig. 2). These avatars can be animated
thanks to motion capture data in order to simulate
very realistic actions.
Figure 2: 3D simulated avatar and its associated skeleton.
In these softwares, we simulate different human
avatars with different morphologies and clothes and
animate them with different realistic motions taken
from the CMU motion capture database
3
3.1.2 Database Construction
In the 3D computer graphics software, we positioned
on an emisphere a virtual camera looking at the sub-
ject. For each movement of the avatar, we record
1
https://www.blender.org/
2
http://www.makehuman.org/
3
The data used in this project was obtained from mo-
cap.cs.cmu.edu.
3D Human Poses Estimation from a Single 2D Silhouette
363

both: 2D image and silhouette (see fig 3), 3D cam-
era poses and 3D joints and bones poses. As a result
for each subject’s pose we can collect the detected sil-
houette related to its 3D skeleton which contains 19
bones. We recorded in 4 subjects with different phe-
notypes and for 4 differents animations: walk cycle,
basket action, jumb and climb. As a result, we ob-
tained 2925 couples silhouette / 3D skeleton.
For each silhouette, we calculated the feature vector
of the shape descriptors presented in section 4 and the
2D poses of reprojected joints for quantitative evalu-
ation of the method.
Figure 3: Human silhouette extracted.
4 KRAWTCHOUK POLYNOMIAL
AND MOMENTS
4.1 Krawtchouk Polynomial
The n-th order of Krawtchouk polynomial is based on
the hypergeometric function and is defined as:
K
n
(x; p, N) =
N
∑
k=0
a
k,n,p
x
k
=
2
F
1
−n, −x; −N;
1
p
(2)
where x, n = 0, 1, 2, ..., N et N > 0, p ∈ (0, 1) and the
hypergeometric function defined as:
2
F
1
(a, b; c; z) =
∞
∑
k=0
(a)
k
(b)
k
z
k
(c)
k
z
k
k!
(3)
(a)
k
= a(a + 1)...(a + k − 1) =
Γ(a + k)
Γ(a)
(4)
Equation (4) is the Pochhammer symbol.
The set of (N+1) Krawtchouk polynomial forms the
complete set of discrete basis functions with weight
function
w(x; p, N) =
N
x
p
x
(1 − p)
N−x
(5)
and satisfies the orthogonality condition :
N
∑
k=0
w(x; p, N)K
n
(x; p, N)K
m
(x; p, N) = ρ(n; p, N)δ
nm
(6)
where ρ(n; p, N) = (−1)
n
1−p
p
n
n!
(−N)
n
and δ
nm
is
the Kronecher function.
In order to eliminate the large variability in the
dynamic range, a normalization process is applied.
Then, the set of normalized (weighted) Krawtchouk
polynomials is defined by (Yap et al., 2003) as:
¯
K
n
(x; p, N) = K
n
(x; p, N)
s
w(x; p, N)
ρ(n; p, N)
(7)
4.2 Krawtchouk Moment
Krawtchouk moment is firstly used in image analysis
by P.T Yap and al.(Yap et al., 2003). Based on the
weighted Krawtchouk polynomials, the (n + m) order
of Krawtchouk moment for an N x M image with in-
tensity function f (x, y) is defined as:
Q
nm
=
N−1
∑
x=0
M−1
∑
y=0
¯
K
n
(x; p1, N − 1)
¯
K
m
(y; p2, M − 1) f (x, y)
(8)
The parameter p1 and p2 can be viewed as a trans-
lation factor. Indeed, if p = 0.5 + ∆p, the weighted
Krawtchouk polynomials are shifted by about N∆p.
The direction of shifting relies on the sign of ∆p, with
the polynomials shifting along + x direction when ∆p
is positive and vice versa. This property allows to ex-
tract the local properties of an images. For software
like Matlab, there is a matrix form of the Krawtchouk
moment. In matrix form, it is defined as:
Q = K
2
AK
T
1
(9)
where Q = {Q
ji
}
i, j=N−1
i, j=0
,
K
v
= {
¯
K
i
( j; pv, N − 1)}
i, j=N−1
i, j=0
and
A = { f ( j, i)}
i, j=N−1
i, j=0
4.3 Feature Extraction
For a given image of human silhouette, we used
Krawtchouk moment to describe the shape of the
human belong to the image. That means to calcu-
late the characteristic vector of the image with dif-
ferent values of the moment. Thanks to the ability of
Krawtchouk moment to extract feature of specific re-
gions of the image, we divided each silhouette in two
parts (up and bottom) (fig. 4) with the parameter p1 =
0.5, p2 = 0.1 (for the up) and p1 = 0.5, p2 = 0.95
(for the bottom). Then, we calculated two character-
istic vectors and combined them to get one vector de-
scriptor. Each human silhouette extracted is converted
to a common space 128 x 48 to get the invariance to
translation and scale. For rotation invariance, we sup-
posed that the vertical is preserved.
VISAPP 2016 - International Conference on Computer Vision Theory and Applications
364
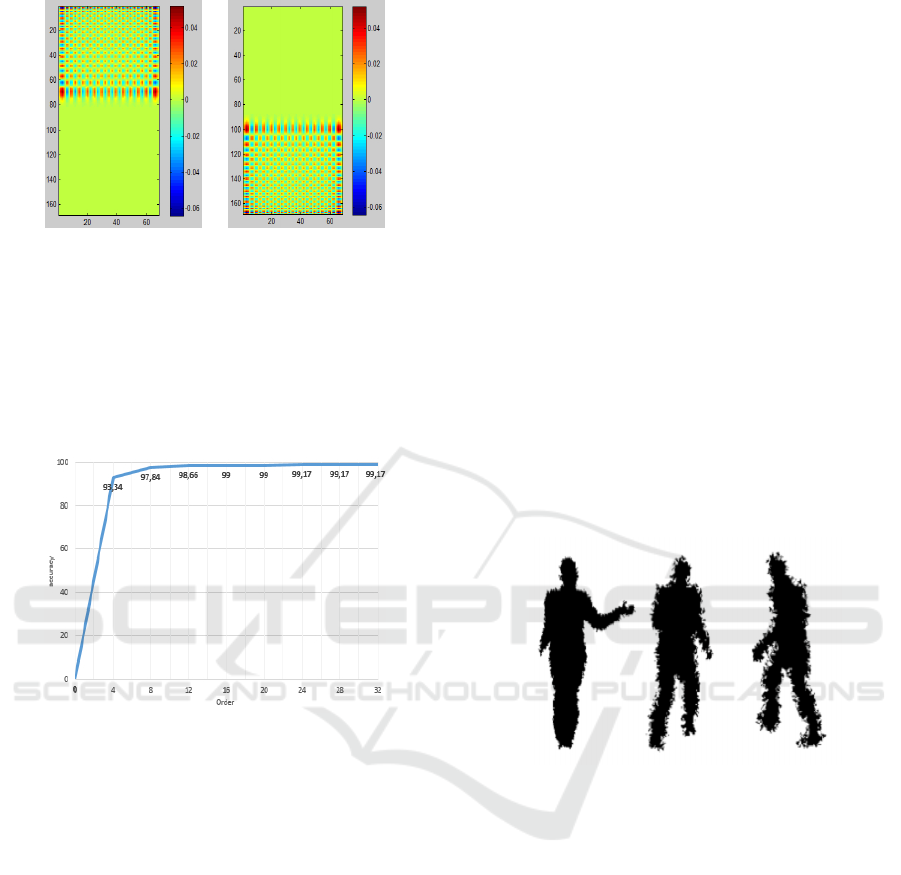
Figure 4: Krawtchouk polynomial for up and bottom.
According to some related works, we chose to calcu-
late Krawtchouk moment with parameter (m = n). In
order to find the best value of n, we used a database
with 600 simulated silhouettes and done cross valida-
tion over all. The fig 5 show that from order (n = m =
24), we got a stable and best accuracy for pose recog-
nition. So, the final feature vector has 48 dimensions.
Figure 5: Accuracy of cross validation with differents value
of n.
5 EXPERIMENTS
In section 3.1 we have shown that for each 2D image
of silhouette of the database, we store both the silhou-
ette vector descriptors and the associated 3D skeleton
composed of 19 joints. Then, for a test image with
extracted silhouette, similarity is computed between
the processed vector of descriptors and database de-
scriptors using the Euclidian distance. As a result we
extract the corresponding silhouette in the database
and its joints 3D poses. Note that the approach does
not only give the more suitable silhouette but gives in
a classified way the N
th
most probable silhouettes. In
order to evaluate the given result, we used the simula-
tion. By knowing the real skeleton of the test image,
we can process the reprojection error of the estimated
3D joints. According to experimental result, when the
mean error is less than 5 pixels, the pose of the re-
sult is considered similar to the pose of the request
silhouette. For this empiric threshold, the difference
between two silhouettes is hardly visible for a human.
5.1 Representativity and Descriptor
Robustness to Noise
Silouette extraction is still an active reseach field. It
is well known that extraction is subjected to noise.
First point was to check our descriptors robustness to
noise. For this, we conducted experiments with two
databases of simulated data for a human avatar with
different morphology and different actions. The first
database contains 2925 training data with Gaussian
noise around the contour of the shape and the second
database contains 608 unlearning data. The aims of
this experience is to evaluate the capacity of shape de-
scriptors to encode various shapes with different value
of the standard deviation of Gaussian noise. Con-
sidering x
0
= [0, 0] the center of the silhouette, let
x
i
= [ρ
i
, θ
i
] the polar coordinates of a contour point.
The noise ∆σ is applied on ρ
i
. ∆σ → N (0, std) with
std = {0, 1, 2, 3}. Example of noised silhouettes are
presented on figure 6.
Figure 6: Noised silhouettes with ∆σ → N (0, std) and
std = {1, 2, 3}.
The aim of this experience is to see if the shape de-
scriptor can perfectly encode a silhouette and make
the difference between closed postures. The silhou-
ette in the database can be very similar because we
extracted it from a video of the motion, so two near
frames provide a very similar silhouette. For std = 0,
we have the original silhouette and for std > 0, the
Gaussian white noise is added on the silhouette. Fig-
ure 7 shows that the more the std increases, the more
the recognition accuracy decreases. For this test we
used a training data set composed of 2925 and a
testing test of 608 silouhettes. For a single neigh-
bour (N = 1), with std = {0, 1, 2, 3}, the recognition
rate is respectively RR = {98.81, 96.43, 74.6, 44.84}.
But, if we augment the number of N assumption re-
turned by the program, the recognition rate grows up
quickly. For N = 7 and std = {0, 1, 2, 3}, the RR are
{100, 100, 96.43, 73.41}. Considering that the silhou-
3D Human Poses Estimation from a Single 2D Silhouette
365
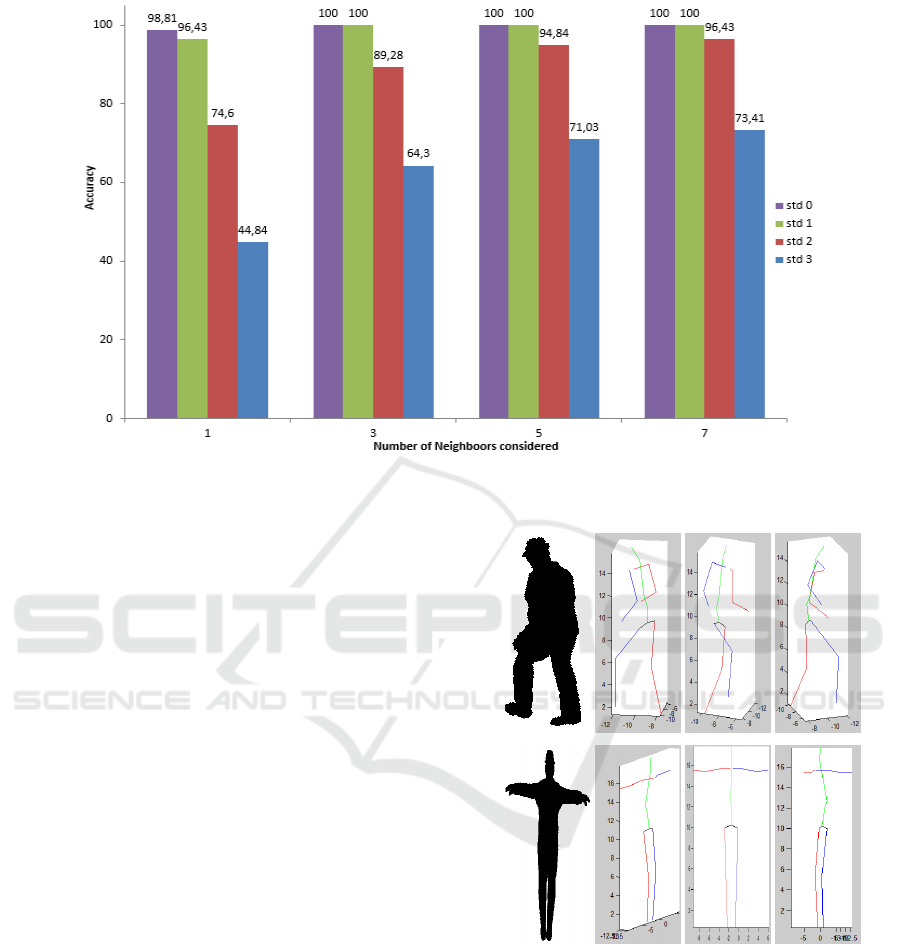
Figure 7: Histogramm of accuracy: colors represent the noise amplitude resp. {0, 1, 2, 3} pixels. The abscisses represent the
number N of neighboors considered {1, 3, 5, 7}.
ettes are very similar and the noise very strong, the
method gives very good results. For the rest of the ar-
ticle we will consider N = 7 first silhouettes given by
the matcher.
In order to estimate the 3D extracted skeleton, we
use the same request silhouette as for previous exper-
iment. For each extracted silhouette, we process the
reprojection error and evaluate the accuracy for dif-
ferent value of N. The Figure 8 shows skeletons esti-
mations from a single monocular image. For this re-
sult, the reprojection error of the first image (human
walking) is 2.4739 px and that of the second image
(human in cross position) is 1.2614 px. This means
error show that the retrieval pose is near to the origi-
nal pose. Note that, in the database, there a no avatar
with the similar appaerance, so this error is reason-
able.
The images that we used as request in fig 8 are sim-
ulated and noised images not present in the learning
database. As expected, we got a very good result with
low reprojection error while comparing images from
the simulation. In order to test the approach on real
images we compute the pose recognition of real im-
ages but with simulated database.
The result of 3D skeleton extraction presented in fig-
ure 9 shows a good association between simulated and
real data. In figure 10, we used an other real world im-
age extracted from a walking action video. The pose
that we process is similar but not exactly the same that
the one in the learning walks in the database. Consid-
ering the 3D pose estimated, the result shows a good
Figure 8: 3D pose estimation result: Left, the resquest sil-
houette and from left to right, the 3D estimated skeleton
from various viewpoints.
detection in term of the shape of the pose. As ex-
pected, confusion is made between right and left foot
and arm.
In order to evaluate the stability and the robustness
of our approach, we considered the successive detec-
tions during a complete movie of the movement. Note
that there is no use of the time line and each frame
is processed independently. Figure 11 (a) shows the
tracking results of four human’s joints during the ex-
ecution of the climbing motion. The red curve show
VISAPP 2016 - International Conference on Computer Vision Theory and Applications
366

Figure 9: Real world data 1.
Figure 10: Real world data 2.
the real position over time and the green curve show
the estimate position over time. We can note that the
shape of different curves is the same. That means that
the successives detections are stable in time and that
our shape descriptor is reliable. We can note that there
is an offset due to shape scaling. The means error over
the motion execution is 1.9765 px. Figure 11 shows
that the shape of the curve changes as a fonction of
the motion. The means error obtained form the jump
motion is 1.9892 px. This discrimination factor con-
firmed that the 3D poses can be used for actions clas-
sification in a video.
(a) Climb motion.
(b) Jump motion.
Figure 11: Tracking result.
5.2 Application to Action Recognition
on Real Data
We used the same shape descriptor for human ac-
tion classification in video, with the public Weizmann
database (see Figure 12). As we do not use tempo-
ral information, our method consists in matching each
frame to an action class and took the class with the
highest associated rate as the class action.
Figure 12: Some images of Weizmann database.
The database is a collection of 90 low-resolution (180
x 144, deinterlaced 50 fps) video sequences show-
ing 9 different people, each performing 10 natural ac-
tions: run, walk, skip, jumping-jack, jump, gallop-
sideways, wave-two-hands, waveone- hand, or bend.
On Weizmann data base, we made a cross validation
with the different movements and with the different
3D Human Poses Estimation from a Single 2D Silhouette
367
phenotypes. In each case and for each frame, we ap-
ply our shape matching method to each frame. As
the resulting silhouette from the database belongs to a
specific movement class we simply count the number
of occurencies. The more represented class is then
considered as the detected movement.
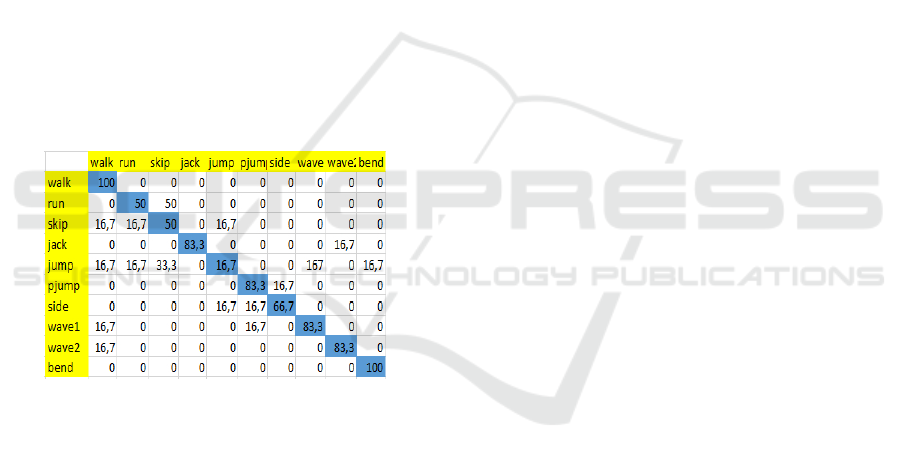
Based on this very simple workflow, we got 71.66%
of good action classification. The confusion matrix
is shown on the fig.13. Of course, this accuracy
rate is lower than the recent accuracy obtained on the
same database (Blank 99.64% (Blank et al., 2005) and
Gorelick 97.83% (Gorelick et al., 2007)). But both of
these approach used space-times cubes to analyse the
motion while we do not consider yet the temporal cor-
relation between successives frame.
According to Gorelick et al.: many successive frames
from the first action (about run) may exhibit high spa-
tial similarity to the successive frames from the sec-
ond one. Ignoring the dynamics within the frames
might lead to confusion between the two actions. As
the approach does not take into account time dimen-
sion, frame to frame comparison leads to misclassifi-
cation for these very similar frame to frame actions:
run, skip and jump.
Figure 13: Confusion matrix.
In future work, we will use our proposed approach
combined with the multi-hypothesis tracking tech-
niques (with N neighboors) to improve the accuracy
of action classification. By this way, we will take into
account the temporal information and the dynamic of
the action.
6 CONCLUSIONS
In this paper, we presented a new approach for 3D
human pose estimation and action classification in
video. The learning database is easily generated
thanks to open source softwares which allow any hu-
man pose simulaion. The proposed posture recogni-
tion method is based on the geometric Krawtchouck
moment and gives promising results. Both applica-
tion to 3D pose estimation and action classification
have been presented. In our work, we tested different
moment order and selected the best suitable for our
approach. We compared our approach with some re-
lated work in action classification and we concluded
that this approach can be improved by using multi-
hypothesis tracking during action identification and
classification. In future work, we will use a combina-
tion of local and global shape descriptor for improv-
ing the pose estimation, and use the estimated poses
to construct an action model for activity classification.
REFERENCES
Agarwal, A. and Triggs, B. (2006). Recovering 3d hu-
man pose from monocular images. Pattern Analy-
sis and Machine Intelligence, IEEE Transactions on,
28(1):44–58.
Aggarwal, J. and Cai, Q. (1999). Human motion analysis:
A review. Computer Vision and Image Understanding,
73(3):428–440.
Andriluka, M., Roth, S., and Schiele, B. (2010). Monocular
3d pose estimation and tracking by detection. In Com-
puter Vision and Pattern Recognition (CVPR), 2010
IEEE Conference on, pages 623–630. IEEE.
Baumberg, A. and Hogg, D. (1994). Learning flexible mod-
els from image sequences. Springer.
Blank, M., Gorelick, L., Shechtman, E., Irani, M., and
Basri, R. (2005). Actions as space-time shapes. In
The Tenth IEEE International Conference on Com-
puter Vision (ICCV’05), pages 1395–1402.
Bourdev, L. and Malik, J. (2009). Poselets: Body part de-
tectors trained using 3d human pose annotations. In
Computer Vision, 2009 IEEE 12th International Con-
ference on, pages 1365–1372. IEEE.
Dalal, N. and Triggs, B. (2005). Histograms of oriented gra-
dients for human detection. In In: IEEE Conference
on Computer Vision and Pattern Recognition, pages
886–893.
de La Gorce, M., Fleet, D., and Paragios, N. (2011).
Model-based 3d hand pose estimation from monocu-
lar video. Pattern Analysis and Machine Intelligence,
IEEE Transactions on, 33(9):1793–1805.
Gavrila, D. M. and Davis, L. S. (1996). 3-d model-based
tracking of humans in action: a multi-view approach.
In Computer Vision and Pattern Recognition, 1996.
Proceedings CVPR’96, 1996 IEEE Computer Society
Conference on, pages 73–80. IEEE.
Gorelick, L., Blank, M., Shechtman, E., Irani, M., and
Basri, R. (2005). Actions as space-time shapes. In
In ICCV, pages 1395–1402.
Gorelick, L., Blank, M., Shechtman, E., Irani, M., and
Basri, R. (2007). Actions as space-time shapes. Trans-
actions on Pattern Analysis and Machine Intelligence,
29(12):2247–2253.
Guo, K., Ishwar, P., and Konrad, J. (2009). Action recogni-
tion in video by covariance matching of silhouette tun-
VISAPP 2016 - International Conference on Computer Vision Theory and Applications
368

nels. In In: XXII Brazilian Symposium on Computer
Graphics and Image Processing, pages 299–306.
Hiyadi, H., Ababsa, F., Bouyakhf, E. H., Regragui, F., and
Montagne, C. (2015). Reconnaissance 3d des gestes
pour l’interaction naturelle homme robot. In Journ
´
ees
francophones des jeunes chercheurs en vision par or-
dinateur.
Hogg, D. (1983). Model-based vision: a program to see a
walking person. Image and Vision computing, 1(1):5–
20.
Jiang, H. (2010). 3d human pose reconstruction using mil-
lions of exemplars. In Pattern Recognition (ICPR),
2010 20th International Conference on, pages 1674–
1677.
Lee, M. W. and Nevatia, R. (2009). Human pose tracking in
monocular sequence using multilevel structured mod-
els. Pattern Analysis and Machine Intelligence, IEEE
Transactions on, 31(1):27–38.
Maji, S., Bourdev, L., and Malik, J. (2011). Action recog-
nition from a distributed representation of pose and
appearance. In Computer Vision and Pattern Recogni-
tion (CVPR), 2011 IEEE Conference on, pages 3177–
3184. IEEE.
Mori, G. and Malik, J. (2002). Estimating human body con-
figurations using shape context matching. In Com-
puter VisionECCV 2002, pages 666–680. Springer.
O’Rourke, J., Badler, N., et al. (1980). Model-based im-
age analysis of human motion using constraint prop-
agation. Pattern Analysis and Machine Intelligence,
IEEE Transactions on, (6):522–536.
P. Dollar, S. B. and Perona, P. (2010). The fastest pedestrian
detector in the west. In In: Proceedings of the British
Machine Vision Conference, pages 1–11.
Rehg, J. M. and Kanade, T. (1994). Visual tracking of high
dof articulated structures: an application to human
hand tracking. In Computer VisionECCV’94, pages
35–46. Springer.
Taylor, C. (2000). Reconstruction of articulated objects
from point correspondences in a single uncalibrated
image. In Computer Vision and Pattern Recognition,
2000. Proceedings. IEEE Conference on, volume 1,
pages 677–684 vol.1.
Valmadre, J. and Lucey, S. (2010). Deterministic 3d hu-
man pose estimation using rigid structure. In Com-
puter Vision–ECCV 2010, pages 467–480. Springer.
Wang, C., Wang, Y., and Yuille, A. (2013). An approach
to pose-based action recognition. In Computer Vision
and Pattern Recognition (CVPR), 2013 IEEE Confer-
ence on, pages 915–922.
Wang, L., Wang, Y., and Gao, W. (2011). Mining layered
grammar rules for action recognition. International
Journal of Computer Vision, 93(2):162–182.
Wei, X. K. and Chai, J. (2009). Modeling 3d human poses
from uncalibrated monocular images. In Computer
Vision, 2009 IEEE 12th International Conference on,
pages 1873–1880. IEEE.
Wren, C. R., Azarbayejani, A., Darrell, T., and Pentland,
A. P. (1997). Pfinder: Real-time tracking of the hu-
man body. Pattern Analysis and Machine Intelligence,
IEEE Transactions on, 19(7):780–785.
Yang, Y. and Ramanan, D. (2011). Articulated pose esti-
mation with flexible mixtures-of-parts. In Computer
Vision and Pattern Recognition (CVPR), 2011 IEEE
Conference on, pages 1385–1392. IEEE.
Yap, P.-T., Paramesran, R., and Ong, S.-H. (2003). Image
analysis by krawtchouk moments. Image Processing,
IEEE Transactions on, 12(11):1367–1377.
3D Human Poses Estimation from a Single 2D Silhouette
369
