
Head Yaw Estimation using Frontal Face Detector
Jos
´
e Mennesson
1
, Afifa Dahmane
2
, Taner Danisman
3
and Ioan Marius Bilasco
1
1
Univ. Lille, CNRS, Centrale Lille, UMR 9189 - CRIStAL - Centre de Recherche en Informatique Signal et Automatique de
Lille, F-59000, Lille, France
2
Computer Science Department, USTHB University, Algiers, Algeria
3
Department of Computer Engineering, Akdeniz University, Antalya, Turkey
Keywords:
Head Pose, Yaw Angle Estimation, Frontal Face Detector, 3D Head Rotation, Ellipsoid.
Abstract:
Detecting accurately head orientation is an important task in systems relying on face analysis. The estimation
of the horizontal rotation of the head (yaw rotation) is a key step in detecting the orientation of the face. The
purpose of this paper is to use a well-known frontal face detector in order to estimate head yaw angle. Our
approach consists in simulating 3D head rotations and detecting face using a frontal face detector. Indeed,
head yaw angle can be estimated by determining the angle at which the 3D head must be rotated to be frontal.
This approach is model-free and unsupervised (except the generic learning step of VJ algorithm). The method
is experimented and compared with the state-of-the-art approaches using continuous and discrete protocols on
two well-known databases : FacePix and Pointing04.
1 INTRODUCTION
Head yaw estimation is one of the key components for
estimating the orientation of the face. Yaw rotation is
a rotational component of 3DoF (yaw, pitch, roll) and
defined as rotation about the vertical z-axis. Accurate
estimation of the yaw angle has particular importance
in several domains such as analysing drivers’ driv-
ing behaviour, video surveillance and facial analysis
(e.g. face recognition, face detection, face tracking,
gender recognition and age estimation). In such con-
tents, the head pose can quickly change from frontal
upright position and generate out-of-plane rotations.
Out-of-plane rotations (yaw and pitch) are more chal-
lenging than in-plane rotations (roll) as they largely
influence the performances of underlying analysing
systems. Therefore, there is a need to recover the head
pose information when the face is not directly facing
to the camera.
Common typologies of approaches in head pose
estimation are summarized in (Murphy-Chutorian and
Trivedi, 2009). These methods can be roughly
grouped into two categories: Model-based and
appearance-based methods. Model-based meth-
ods use 3D information for head pose estimation
while appearance-based methods infer the relation-
ship among the 3D points and their projections on 2D.
According to the survey, the performance of head-
pose estimation systems significantly degrades in out-
of-plane rotations than in-plane rotations. As indi-
cated in (Jung and Nixon, 2010) existing 2D mod-
els are not effective since they do not represent the
curved surfaces and they do not cope well with large
variations in 3D. Therefore, they are not robust to out-
of-plane rotations.
(Kwon et al., 2006) used cylindrical head model
to recover the 3D head pose information from a set of
images. They first detect the face and then generate
an initial template for the head pose and cylindrical
head model. They dynamically update this template
to recover the problems in tracking. Head motion is
tracked based on optical flow in sequential images.
For this reason, this method requires a set of sequen-
tial frames and cannot be applied to single images.
(Narayanan et al., 2014) studied yaw estimation
using cylindrical and ellipsoidal face models. Their
study on ellipsoidal framework provides MAE be-
tween 4
◦
and 8
◦
outperforming manifold-based ap-
proaches on FacePix dataset. Methods dealing with
yaw detection become more and more complex by
combining various techniques requiring most of the
time specific machine learning tools. This kind of
methods can suffer from the fact that combining
methods that are not completely precise and robust
individually, may eventually result in a lack of global
precision and tuning the system becomes complicated
Mennesson, J., Dahmane, A., Danisman, T. and Bilasco, I.
Head Yaw Estimation using Frontal Face Detector.
DOI: 10.5220/0005711905170524
In Proceedings of the 11th Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2016) - Volume 4: VISAPP, pages 517-524
ISBN: 978-989-758-175-5
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
517

0
10
20
30
40
50
60
70
Degree of head yaw rotation
Total face detections at 0 neighboorhood
Figure 1: Changes in total VJ face detections for different yaw angles at zero neighborhood. Each bar shows the number of
detections obtained from different scales of the VJ detector for specified degree of rotation.
as compromises between the drawbacks of underlying
methods might not be straight-forward. Besides, the
learning process in such methods can conduct to spe-
cific solutions that are tuned for a specific training set
and may behave differently in more generic context
such as in-the-wild unconstrained settings.
We discuss apart approaches that are dealing with
the discrete yaw estimation and continuous yaw es-
timation. Discrete pose represents the orientation at
fixed intervals (e.g., ±15°) and they are only capa-
ble of estimating coarse pose space. On the other
hand continuous estimations can handle fine (precise)
poses. In each of this two categories we are consider-
ing approaches that study the yaw estimation. The
yaw discrete estimation approaches can be consid-
ered, most of the time, as regular classification prob-
lems where each discrete pose specific training and
analysis is done. In the yaw continuous estimation
regression methods and/or tracking mechanisms ini-
tialized from known/predefined frontal are commonly
used.
Using a similar idea as (Danisman and Bilasco,
2015) which estimate roll pose estimation, we focus
on yaw pose estimation from still images using frontal
Viola-Jones (Viola and Jones, 2001) face detector us-
ing a two-stage approach. The frontal Viola-Jones
detector responds positively to faces that are nearly
frontal. However, the number of candidate face re-
gions responding to the Viola-Jones detector is gen-
erally more important for frontal faces than for non-
frontal faces and falls zero for profile faces. Figure 1
shows total VJ face detections for different yaw an-
gles at zero neighbourhood. It is clear that the maxi-
mum of detected frontal faces is obtained with a yaw
angle near zero degree (a frontal face). When one
moves away from frontal face, the number of detected
frontal faces decreases to zero with a Gaussian decay.
In order to take advantage of this fact, we present the
same face under different perspectives corresponding
to candidate yaw angles to the Viola-Jones detector.
This idea is illustrated in Figure 2 where a face (whose
yaw angle is −30°) is projected onto a 3D ellipsoid
and rotated artificially from −90° to 90°. As a nearly-
frontal face still activates the Viola-Jones detector, we
consider the whole span of perspectives angles that
responded positively to Viola-Jones in order to esti-
mate the yaw by considering several acceptance cri-
teria : continuous detection over a given yaw range,
average over all positive candidate angles. Another
says is that regardless of the yaw angle of the anal-
ysed face, we apply a set of transformation to the face
and we study how the VJ detector behaves with regard
to applied transformation. The inverse yaw transfor-
mation yielding the best behaviour with regard to a
given detector (Viola-Jones frontal face detector in
our case) and a given criteria (number of consecutive
detections, for instance) is a fairly good candidate for
the yaw detection. The main idea is not to character-
ize the object, but the inverse transformation applied
on the object in order to bring the object in a state
where expected behaviour is met. The strength of
this approach resides also in the use of a well-known
method largely studied and used in the literature. In
addition, this method does not require specific learn-
ing step other than the one used for training the un-
derlying frontal Viola-Jones face detector.
The remaining part of this paper is organized as
follows. Section 2 discuss the existing typologies of
yaw estimation approaches. Section 3 presents our
approach including head segmentation, 2D projection
VISAPP 2016 - International Conference on Computer Vision Theory and Applications
518

0
5
10
15
20
25
30
35
40
45
50
Degree of rotation of the 3D head
Total face detections at 0 neighborhood
Original
image
Yaw = -30°
min=-80°
max=20°
-30°
Estimated
yaw angle
Figure 2: Changes in total VJ face detections for different yaw angles at zero neighborhood. Each bar shows the number of
detections obtained from different scales of the VJ detector for specified degree of rotation of the ellipsoid.
on ellipsoid, face detection and head yaw estimation.
Section 4 explains the experimentation datasets and
presents evaluation results on a continuous and dis-
crete perspective.
2 STATE OF THE ART
A common functional taxonomy covering the large
variations in face orientation estimation studies can
be found in (Murphy-Chutorian and Trivedi, 2009).
In the current work, we selected representative ap-
proaches that report results on yaw estimation on pub-
lic datasets such as FacePix (Black et al., 2002) and
Pointing04 (Gourier et al., 2004). In particular, we
selected the works giving the best results in (Murphy-
Chutorian and Trivedi, 2009) and in (Dahmane et al.,
2014) on these two databases. Among the numerous
approaches for head pose estimation, one can cite :
Model-based approaches include geometric and
flexible model approaches. For example, (Narayanan
et al., 2014) propose to use cylindrical and ellipsoidal
face models to estimate yaw angle. (Tu et al., 2007)
perform head pose estimation based on a pose tensor
model.
Regression based approaches consider pose an-
gles as regression values. In (Stiefelhagen, 2004), a
neural network is trained for fine head pose estima-
tion over a continuous pose range. (Gourier et al.,
2007) propose to train an associative neural network
using data from facial feature locations while (Ji et al.,
2011) use convex regularized sparse regression.
Manifold Embedding approaches produce a low
dimensional representation of the original facial fea-
tures and then learn a mapping from the low dimen-
sional manifold to the angles. In (Balasubramanian
et al., 2007), biased manifold embedding for super-
vised manifold learning is performed and (Liu et al.,
2010) propose a K-manifold clustering method, inte-
grating manifold embedding and clustering.
Symmetry-based approaches use the symmetrical
properties of the head to estimate yaw angle as in
(Dahmane et al., 2014).
3 OUR APPROACH
Our approach is based on the classical Viola-Jones
(Viola and Jones, 2001) frontal face detector. Indeed,
this detector is able to detect frontal faces in images.
Assuming that a frontal face is a face with a head yaw
angle ∈ [-45°;45°], head yaw can be estimated by ar-
tificially turning head in 3D space from -90° to 90°
about the vertical z-axis and detect at each step if there
is a frontal face in the image plane. Head yaw angle
can be estimated by determining the angle at which
the 3D head must be rotated to be frontal. Using this
assumption, our method is highlighted in Figure 3.
First, the head must be segmented as much accu-
rately as possible because our method depends highly
on this step. The head can be segmented for example
using GrabCut (Rother et al., 2004) or a skin detector
(Zaidan et al., 2014). In this paper, GrabCut is chosen
because it is a well-known and widely used method to
segment images. Then, the head is cropped and pro-
jected on a 3D sphere to simulate the 3D shape of the
head. It can be done using complex methods which
estimate the real shape of the face as in (Blanz and
Vetter, 1999). In order to keep the method as efficient
as possible, we choose to project the face on an ellip-
Head Yaw Estimation using Frontal Face Detector
519

-90° +90°
+90°-90° -30° +0° +30°
... ... ... ...
FACE DETECTION
NO NOYES NOYES
... ... ... ...
+90°
-90°
+0°
Min
Max
-66° +6°
Yaw Est.
-30°
...
Head
segmentation
Head
crop
Original
image
Projection
on ellipsoid
Figure 3: Overview of our method.
soid. The ellipsoid is then turned from −90° to 90°
about the z-axis to simulate a 3D head face turn and,
at each angle, face detection is performed. Results of
detection and non-detection are stored in a binary vec-
tor. After a filtering step, we consider the minimum
and the maximum angles where the face has been de-
tected. Several criteria can be applied (consecutive
frames detection, mode, mean, etc.), but here we re-
tain the mean of the detection angles.
3.1 Head Segmentation
Our approach depends on the segmentation of the
face. In fact, if there is unbalanced background on
the right and on the left of the face, this will skew
the estimation of the head yaw. In order to solve this
problem, the face must be accurately segmented be-
fore the projection on the ellipsoid.
One of the most well-known and robust algorithm
to segment objects in images is GrabCut (Rother
et al., 2004). This algorithm needs to be initialized
with an area (a rectangle for example) which probably
corresponds to the foreground (here, it is the head of
the person). Everything outside the rectangle is con-
sidered as the background.
In this paper, we assumed that the face is centered.
So, the area given to the GrabCut is a rectangle in the
center of the image. The size of the rectangle is half
of the size of the image. This constraint can be low-
ered if we assume that the yaw angle ∈ [−45°; 45°]
and an initial VJ can be used instead. Outside this
range, other versions of VJ or other techniques must
be employed to find the first candidate face boundary
box. RACV library (Auguste, 2014) is used to op-
timize the head rectangle given to GrabCut using the
skin proportion therein. Finally, the convex hull of the
head is computed.
3.2 Projection on Ellipsoid
In order to simulate the rotation of the face, the seg-
mented face is projected on an ellipsoid. In this pa-
per, we have used OpenGL (Open Graphics Library)
as in (Aissaoui et al., 2014). The height of the ellip-
soid is 1.5 times the width in order to approximate
the general proportions of faces. The ellipsoid is ro-
tated from −90° to 90° about the z-axis to cover all
the angles where the frontal face can be detected. The
incremental parameter of the rotation angle, denoted
step-factor, can vary from 1° to 10° in order to ac-
celerate the process. The effect of this parameter on
the results is shown in section 4. Finally, the image
we consider is a projection of the 3D ellipsoid on the
image plane.
3.3 Frontal Face Detection
Whenever the face is rotated, a face detection is per-
formed. In this paper, the classical VJ detector (Viola
and Jones, 2001) who proposes to use Haar Feature-
based Cascade Classifiers to detect faces, is used.
Each frontal face detection is then stored in a binary
vector.
In order to increase the chance of a matching size
with the model for detection, we use a small step for
resizing (scale factor=1.1). To eliminate false posi-
tives and get the proper face rectangle out of detec-
tions, the minimum neighbours parameter is set to 1.
3.4 Head Yaw Estimation
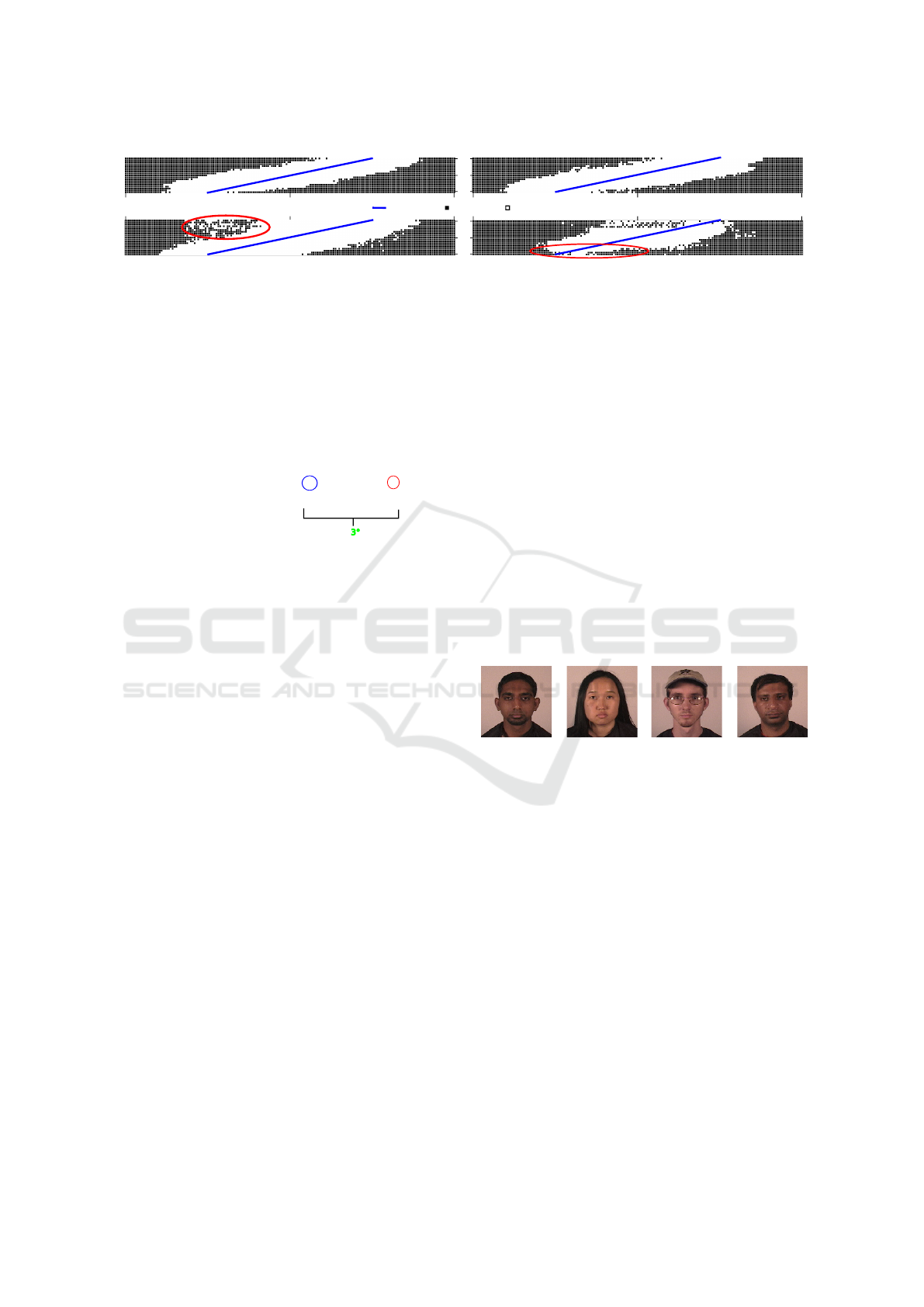
As it is said before, a binary vector containing the de-
tection results is obtained. In Figure 4, these vectors
are represented by binary images where white (resp.
black) pixel depicts that a face is detected (resp. not
detected). Each image corresponds to a different clip,
each line corresponds to a head image with a particu-
lar yaw angle and each columns corresponds to a ro-
tation angle of the ellipsoid. If we assume that there
is no error in the detection results, head yaw angles
can be estimated by considering the minimum and the
maximum angles the head is detected. Indeed, the VJ
detector being symmetric, it will detect the face as
well if it is slightly rotated to the right or left (See Fig-
ure 4 - Clip7 and Clip25 ). A morphological opening
of size 3 to suppress noise is performed. Estimated
VISAPP 2016 - International Conference on Computer Vision Theory and Applications
520
-45°
45°
0°
Ground-truth No detection Detection
-45°
45°
0°
-90°
90°
90°
0°
-90°
0°
-90°
90°
Clip 7 : Good detections Clip 25 : Good detections
Clip 16 : Many false positive Clip 21 : Many false negative
Figure 4: Detection results on FacePix dataset. White pixel: detection, black pixel: non detection, blue line: ground-truth.
head yaw is the angle between the minimum and the
maximum angles at which the frontal face is detected.
Several solutions can be proposed :
• HYE1 : In order to make our approach robust to
false positive detection (see Figure 4 - Clip16),
connected detections are labeled. Then, only the
largest connected component is considered to es-
timate head yaw angle as in Figure 5.
... 0 0 1 1 0 0 0 0 0 1 1 1 1 1 1 1 1 1 0 0 0 ...
... 0 0 1 1 0 0 0 0 0 2 2 2 2 2 2 2 2 2 0 0 0 ...
... -10 -9 -8 -7 -6 -5 -4 -3 -2 -1 0 1 2 3 4 5 6 7 8 9 10 ...
Angles in °
3°
Detection
Labelling
Figure 5: Labeling connected detections and choosing the
largest connected component.
• HYE2 : The center of mass of the binary vector
can be computed. This version is more robust to
false negative detections (see Figure 4 - Clip21).
In the following section, we are conducting exper-
iments to evaluate our methods. The objectives are
to compare the results of our approach with the state
of the art and to evaluate the influence of the param-
eters, initial yaw angles and different face shapes on
the results.
4 EXPERIMENTS
Tests are made on FacePix (Black et al., 2002) and
Pointing04 (Gourier et al., 2004) datasets. Two proto-
cols (continuous and discrete) have been defined. The
continuous like protocol aims to evaluate the capacity
of the proposed method to offer fine grain characteri-
zation of yaw movements. The discrete like protocol
considers the yaw movements problem as a classifi-
cation problem, where 15° yaw interval classes are
considered.
4.1 Datasets
In order to validate our approach, head yaw estima-
tion is tested on several databases :
- FacePix Dataset
This dataset contains 3 sets of face images for each
of 30 people included in the dataset. In Figure 6, we
present frontal views of four persons that where in-
cluded in Figure 4 experiments. We have selected this
four persons in order to study closely the impact of
eye glasses, long hair and skin color on the results.
However, the whole dataset is considered for the re-
sults presented in the following. The first set contains
181 color face images which corresponds to yaw an-
gle which vary across a range from +90° to −90°.
The second and the third sets contain just frontal faces
and just concern illumination variations.
In this paper, we consider a subset of the first set
which contains only faces which are in [−45°; 45°]
(i.e. 2730 images) due to the frontal face detector
used. Indeed, if too much information about the face
is missing, the frontal face detector is no longer able
to detect the face, even if the head is artificially ro-
tated.
Clip7 Clip16 Clip21 Clip25
Figure 6: Several images from facePix dataset.
- Pointing04 Dataset
The head pose database contains 15 sets of im-
ages. Each set consists in two series of 93 images of
the same person at different poses. There are 15 peo-
ple in the database, wearing glasses or not and hav-
ing various skin color. The pose, or head orientation
is determined by 2 angles (yaw,pitch), which varies
from −90° to +90°. The first serie is used and only
faces which are in [−45°; 45°] (i.e. 105 images) are
considered due to the face detector used.
4.2 Evaluation
In this paper, the following experiments are conducted
on continuous (i.e. evaluated every degree on FacePix
dataset) and discrete space (i.e. evaluated every 15
degree on Pointing04 dataset).
Head Yaw Estimation using Frontal Face Detector
521
4.2.1 Experiments on FacePix
In these tests, continuous experiments are conducted
using well-known measures as the Mean Average Er-
ror (MAE), the Root Mean Square Error (RMSE) and
the Standard Deviation (STD).
In Table 1, one can see that our approach pro-
vides comparable MAE with classical approaches of
the state of the art. But our approach is model-
free, person-free and unsupervised (except the generic
learning step of VJ algorithm). One can also add
that a significant drawback of manifold learning tech-
niques is the lack of a projection matrix to treat
new data points (Balasubramanian et al., 2007). The
HYE2 method gives the best result on this database.
The following charts show the results computed with
this solution.
Table 1: FacePix : Comparison with the state of the art.
Method MAE
(Balasubramanian et al., 2007)
Biased Isomap 5.02°
Biased LLE 2.11°
Biased LE 1.44°
(Liu et al., 2010)
Manifold clustering 3.16°
(Ji et al., 2011)
Regression 6.1°
(Dahmane et al., 2014)
Symmetry classification 3.14°
(Narayanan et al., 2014)
CE 5.55°
Center CE 5.26°
Boundary CE 5.28°
Proposed Method
HYE1 5.2°
HYE2 4.8°
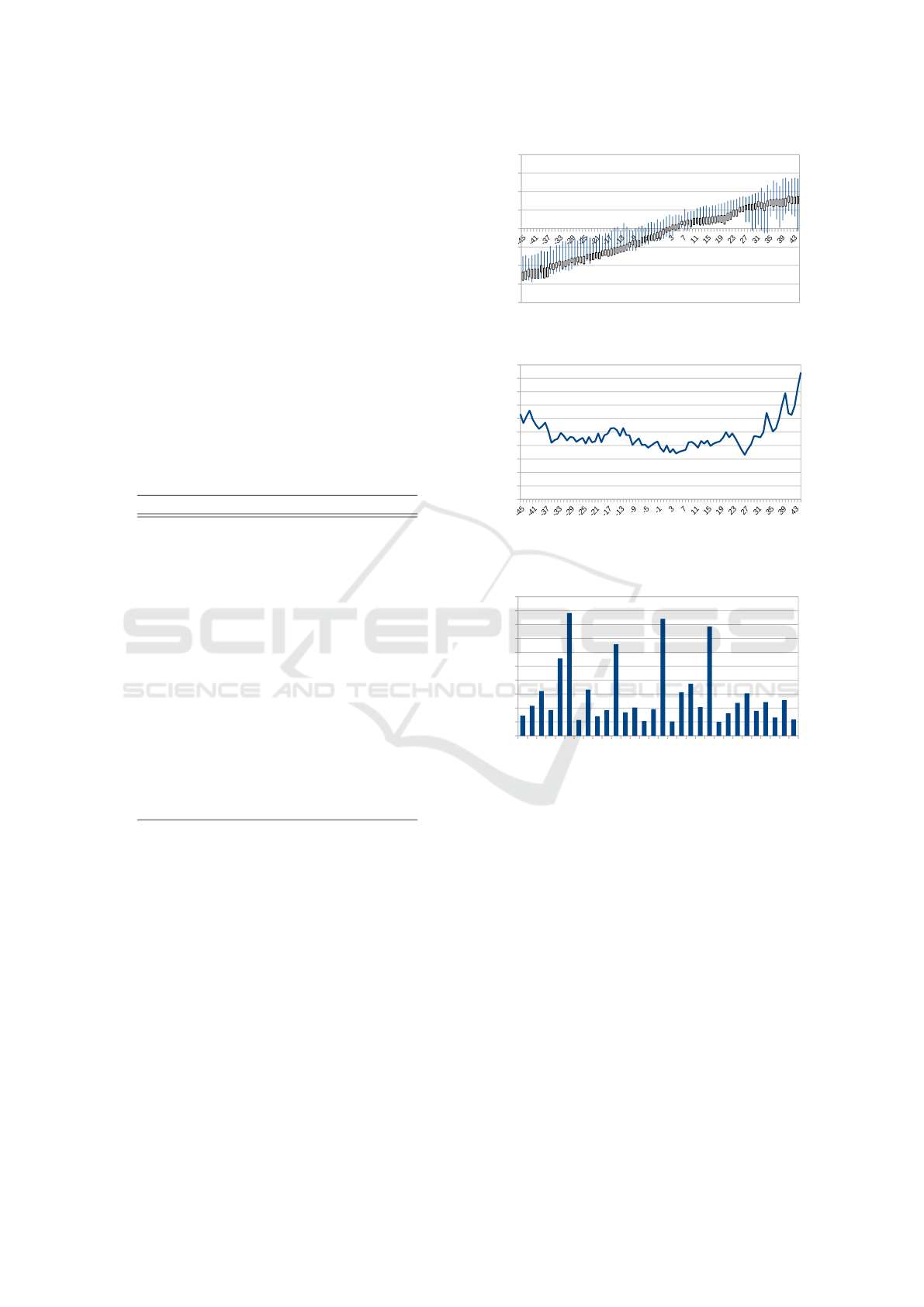
In Figure 7, a boxplot which represents estimated
yaw angles with regard to the groundtruth is shown.
It is clear that most of estimated yaw angles are near
the groundtruth. Widest errors are found nearby −45°
and 45°. This is due to the VJ detector which has
difficulties to detect frontal faces at these angles even
if the face is turned artificially. Indeed, there can be a
lack of face information (e.g. an eye is hidden) which
can prevent the frontal face detection when the head
is turned to -45° or 45°.
In order to evaluate our method in function of per-
sons and head yaw angles, MAE measures are com-
puted and shown in Figure 8 and 9. Figure 8 shows
that most angles (between −35° and 33°) have a MAE
under 5.5°. The worst results are obtained when head
yaw angles are greater than 35° due to the frontal face
-80
-60
-40
-20
0
20
40
60
80
Groundtruth
Estimated angles
Figure 7: FacePix : boxplot of head yaw angle estimation.
0
1
2
3
4
5
6
7
8
9
10
Ground-truth yaw angles
MAE
Figure 8: FacePix : Histogram of head yaw angles estima-
tion MAE for ground-truth yaw angles.
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30
0
2
4
6
8
10
12
14
16
18
20
Clips
MAE
Figure 9: FacePix : Histogram of head yaw angles estima-
tion MAE for Clip1-30.
detector properties.
In Figure 9, most Clips have low MAE (< 8°) ex-
cept Clip5, 6, 11, 16, 21. Frontal faces in these clips
are sometimes difficult to detect. For example, in
Clip21 (see Figure 6 and 4), the person wear glasses,
and in Clip11, the person closes almost completely
her eyes, which prevent neat face detection.
We have seen in section 3.2 that our method de-
pends of a parameter which controls the incremen-
tal step of the rotation of the face (i.e. step-factor).
Figure 10 shows the evolution of MAE, MRSE and
STD obtained on FacePix using several step-factor
settings. One can easily see that the results vary only
slightly if step-factor is less or equal to 4°. Hence for
speed up purposes, we can divide the number of rota-
tions of the 3D head by four while maintaining a good
accuracy.
VISAPP 2016 - International Conference on Computer Vision Theory and Applications
522

1 2 3 4 5 6 7 8 9 10
0
2
4
6
8
10
12
MAE
MRSE
STD
Step-factor
Values in degree
Figure 10: FacePix : Effect of step-factor(see section 3.2)
on MAE, MRSE and STD.
4.2.2 Experiments on Pointing04
In this section, we consider discrete yaw classifica-
tion. Hence, the results correspond to the number of
well estimated yaw over the total number of head yaw
to estimate. In order to cluster the estimated head yaw
into discrete classes, it is associated to the nearest yaw
class. There are 7 head yaw classes : −45°, −30°,
−15°, 0°, 15°, 30°, 45°.
In Table 2, results on Pointing04 dataset are shown
in terms of MAE and recognition rates. It is clear that
our method outperforms most of the approaches of the
state of the art. Again, other methods require a learn-
ing step for estimating head yaw while our method
does not. Concerning this dataset, the HYE1 method
outperform the HYE2 one, so the following charts
show the results computed with this solution. This is
due to many false detections which appears in several
detection results for this dataset. As we said before,
HYE1 is more robust to that problem.
Table 2: Pointing04 : Comparison with the state of the art.
Method MAE Reco. rates
(Stiefelhagen, 2004) 9.5° 52%
(Gourier et al., 2007)
Human Performance 11.8° 40.7%
Associative Memories 10.1° 50.0%
(Tu et al., 2007)
High-order SVD 12.9° 49.25%
PCA 14.11° 55.20%
LEA 15.88° 45.16%
(Ji et al., 2011)
Regression 8.6° -
(Narayanan et al., 2014)
CE 7.2° -
Center CE 6.82° -
Boundary CE 6.9° -
Proposed Method
HYE1 6.96° 63.81%
HYE2 7.15° 59.05%
As it is shown in Figure 11, the worst recognition
rates are obtained with angles −45° and 45°. Again,
this is due to the properties of the VJ detector we used
in this paper. The results for other angles are better or
equal 60%.
-45 -30 -15 0 15 30 45
0,00%
10,00%
20,00%
30,00%
40,00%
50,00%
60,00%
70,00%
80,00%
90,00%
100,00%
Ground-truth yaw angles
Recognition rates
Figure 11: Pointing04 : Histogram of recognition rates for
ground-truth yaw angles.
In Figure 12, one can note that for most persons,
the results are good (> 50%). Worst results are ob-
tained for persons 2,7,8,9. The reason is a bad seg-
mentation of the head of these persons due, among
other things, to their hair which cover their ears.
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
0,00%
10,00%
20,00%
30,00%
40,00%
50,00%
60,00%
70,00%
80,00%
90,00%
100,00%
Personne
Recognition rates
Figure 12: Pointing04 : Histogram of recognition rates for
Personne1-30.
5 CONCLUSION
A new approach to estimate head yaw angle is pre-
sented in this paper. Face images are projected on 3D
ellipsoid and artificially turned about the vertical z-
axis. The goal is to determine the angle the head must
be turned to be frontal. Frontal faces are detected us-
ing a well-known frontal face detector. Advantages
are that it is a person-free, model-free and unsuper-
vised approach. It is not a black box, so every param-
eters can be set easily. Experiments on well-known
datasets have shown that this method gives compara-
ble or better results than the state of the art. In future
works, other methods to segment heads and detect
frontal faces can be explored. Also, the 3D modeling
Head Yaw Estimation using Frontal Face Detector
523

of the 3D face could be improved using more accurate
3D shape than a simple ellipsoid. This method could
also be extended to pitch angle estimation. In this pa-
per, we propose two methods to estimate head yaw
angles (HYE1 and HYE2). A hybrid method which
uses HYE1 or HYE2 depending on the size of the
connected component could be defined to take advan-
tages of both approaches.
ACKNOWLEDGEMENTS
This work was supported by ”Empathic Products”,
ITEA2 1105 and the authors thank IRCICA USR
3380 for financial support.
REFERENCES
Aissaoui, A., Martinet, J., and Djeraba, C. (2014).
Rapid and accurate face depth estimation in passive
stereo systems. Multimedia Tools and Applications,
72(3):2413–2438.
Auguste, R. (2014). Racv library can be downloaded from.
https://github.com/auguster/libRacv/.
Balasubramanian, V., Ye, J., and Panchanathan, S. (2007).
Biased manifold embedding: A framework for
person-independent head pose estimation. In CVPR,
2007. IEEE Conference on, pages 1–7.
Black, J., Gargesha, M., Kahol, K., Kuchi, P., and Pan-
chanathan, S. (2002). A framework for performance
evaluation of face recognition algorithms. In ITCOM,
Internet Multimedia Systems II, Boston.
Blanz, V. and Vetter, T. (1999). A morphable model for
the synthesis of 3d faces. In Proceedings of the 26th
Annual Conference on Computer Graphics and Inter-
active Techniques, SIGGRAPH ’99, pages 187–194,
New York, NY, USA. ACM Press/Addison-Wesley
Publishing Co.
Dahmane, A., Larabi, S., Bilasco, I. M., and Djeraba, C.
(2014). Head Pose Estimation Based on Face Sym-
metry Analysis. Signal, Image and Video Processing.
Danisman, T. and Bilasco, I. M. (2015). In-plane face ori-
entation estimation in still images. Multimedia Tools
and Applications, pages 1–31.
Gourier, N., Hall, D., and Crowley, J. L. (2004). Estimating
Face Orientation from Robust Detection of Salient Fa-
cial Features. In Proceedings of Pointing 2004, ICPR,
International Workshop on Visual Observation of De-
ictic Gestures.
Gourier, N., Maisonnasse, J., Hall, D., and Crowley, J.
(2007). Head pose estimation on low resolution im-
ages. In Stiefelhagen, R. and Garofolo, J., editors,
Multimodal Technologies for Perception of Humans,
volume 4122 of LNCS, pages 270–280. Springer
Berlin Heidelberg.
Ji, H., Liu, R., Su, F., Su, Z., and Tian, Y. (2011). Robust
head pose estimation via convex regularized sparse re-
gression. In ICIP, 2011, pages 3617–3620.
Jung, S.-U. and Nixon, M. (2010). On using gait biomet-
rics to enhance face pose estimation. In Biometrics:
Theory Applications and Systems, 2010 Fourth IEEE
International Conference on, pages 1–6.
Kwon, O., Chun, J., and Park, P. (2006). Cylindrical model-
based head tracking and 3d pose recovery from se-
quential face images. In Proceedings of the 2006 In-
ternational Conference on Hybrid Information Tech-
nology - Volume 01, pages 135–139, Washington, DC,
USA. IEEE Computer Society.
Liu, X., Lu, H., and Li, W. (2010). Multi-manifold mod-
eling for head pose estimation. In ICIP, 2010, pages
3277–3280.
Murphy-Chutorian, E. and Trivedi, M. (2009). Head pose
estimation in computer vision: A survey. PAMI, IEEE
Transactions on, 31(4):607–626.
Narayanan, A., Kaimal, R., and Bijlani, K. (2014). Yaw
estimation using cylindrical and ellipsoidal face mod-
els. Intelligent Transportation Systems, IEEE Trans-
actions on, 15(5):2308–2320.
Rother, C., Kolmogorov, V., and Blake, A. (2004). ”grab-
cut”: Interactive foreground extraction using iterated
graph cuts. ACM Trans. Graph., 23(3):309–314.
Stiefelhagen, R. (2004). Estimating head pose with neural
nnetwork - results on the pointing04 icpr workshop
evaluation data. In Pointing 2004 Workshop: Visual
Observation of Deictic Gestures.
Tu, J., Fu, Y., Hu, Y., and Huang, T. (2007). Evaluation
of head pose estimation for studio data. In Stiefel-
hagen, R. and Garofolo, J., editors, Multimodal Tech-
nologies for Perception of Humans, volume 4122 of
LNCS, pages 281–290. Springer Berlin Heidelberg.
Viola, P. and Jones, M. (2001). Rapid object detection using
a boosted cascade of simple features. pages 511–518.
Zaidan, A., Ahmad, N., Karim, H. A., Larbani, M., Zaidan,
B., and Sali, A. (2014). Image skin segmentation
based on multi-agent learning bayesian and neural
network. Engineering Applications of Artificial Intel-
ligence, 32:136 – 150.
VISAPP 2016 - International Conference on Computer Vision Theory and Applications
524
