
Hand Waving Gesture Detection using a Far-infrared Sensor Array with
Thermo-spatial Region of Interest
Chisato Toriyama
1
, Yasutomo Kawanishi
1
, Tomokazu Takahashi
2
, Daisuke Deguchi
3
, Ichiro Ide
1
,
Hiroshi Murase
1
, Tomoyoshi Aizawa
4
and Masato Kawade
4
1
Graduate School of Information Science, Nagoya University, Furo-cho, Chikusa-ku, Nagoya-shi, Aichi, Japan
2
Faculty of Economics and Information, Gifu Shotoku Gakuen University, 1-38, Nakauzura, Gifu-shi, Gifu, Japan
3
Information Strategy Office, Nagoya University, Furo-cho, Chikusa-ku, Nagoya-shi, Aichi, Japan
4
Corporate R&D, OMRON Corporation, 9-1, Kizugawadai, Kizugawa-shi, Kyoto, Japan
Keywords:
Far-infrared Sensor Array, Gesture Detection.
Abstract:
We propose a method of hand waving gesture detection using a far-infrared sensor array. The far-infrared
sensor array captures the spatial distribution of temperature as a thermal image by detecting far-infrared waves
emitted from heat sources. The advantage of the sensor is that it can capture human position and movement
while protecting the privacy of the target individual. In addition, it works even at night-time without any light
source. However, it is difficult to detect a gesture from a thermal image sequence captured by the sensor
due to its low-resolution and noise. The problem is that the noise appears as a similar pattern as the gesture.
Therefore, we introduce “Spatial Region of Interest (SRoI)” to focus on the region with motion. Also, to
suppress the influence of other heat sources, we introduce “Thermal Region of Interest (TRoI)” to focus on the
range of the human body temperature. In this paper, we demonstrate the effectiveness of the method through
an experiment and discuss its result.
1 INTRODUCTION
Gesture has been drawing attention as a means of user
interfaces. For example, with a gesture interface, we
can easily control appliances by performing gestures
intuitively using our own body. Especially, hand wav-
ing is one of the simplest and the most intuitive ges-
ture. Among operations for controlling appliances,
switching on/off are the most basic ones. Thus, in this
paper, we aim to detect a hand waving gesture which
can be used for switching on/off appliances.
Gesture interfaces need to capture human body
motions to detect the target gesture. Human body mo-
tions can be obtained by either contact devices or non-
contact devices. In the case of contact devices, users
need to wear them. An example of a contact device is
a ring with multiple sensors (Jing et al., 2012). On
the other hand, in the case of non-contact devices, we
do not need to wear them. Cameras such as RGB-D
cameras (Mahbub et al., 2013) and visible-light cam-
eras (Lee and Kim, 1999) are mainly used as non-
contact devices. Therefore, we can use a gesture in-
㻞㻟㻚㻡䉝
㻞㻣㻚㻜䉝
23.5Υ
27.0Υ
(a) Visible-light image (b) Low-resolution thermal image
Figure 1: Examples of an output of a visible light camera
and a 16 × 16 far-infrared sensor array.
terface with our own body as long as we are in the
shooting range of a non-contact device.
Practically, visible-light cameras have a draw-
back. We cannot always set cameras anywhere and/or
anytime because they involve privacy issue and they
do not work well in the dark. As for the privacy issue,
if an user is always observed by a camera in his/her
private area, the user may feel uncomfortable. As
we can see from the captured image shown in Fig-
ure 1 (a), we can easily identify the individual from
the image and what the user is doing, so it may not
be acceptable. On the other hand, an example of a
Toriyama, C., Kawanishi, Y., Takahashi, T., Deguchi, D., Ide, I., Murase, H., Aizawa, T. and Kawade, M.
Hand Waving Gesture Detection using a Far-infrared Sensor Array with Thermo-spatial Region of Interest.
DOI: 10.5220/0005718105450551
In Proceedings of the 11th Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2016) - Volume 4: VISAPP, pages 545-551
ISBN: 978-989-758-175-5
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
545

Υ
Υ
24.0Υ
27.0Υ
(a) Visible-light image (b) Low-resolution thermal image
Figure 2: Examples of an output at night-time.
37 mm
20 mm
6.45 mm
Υ
Υ
Figure 3: A 16 × 16 far-infrared sensor array.
Sensor
Switch
Switching
(on/off)
Figure 4: Example of the application of the proposed
method.
captured image at night-time is shown in Figure 2 (a).
Although it is difficult to identify the user, now it be-
comes also difficult to observe the gesture.
To avoid these problems, a far-infrared sensor ar-
ray (Ohira et al., 2011) can be a good choice. A 16
× 16 far-infrared sensor array is shown in Figure 3.
Although the sensor captures noisy image, it captures
the spatial distribution of temperature as a thermal im-
age by detecting far-infrared waves emitted from heat
sources. Therefore, it works even at night-time with-
out any light source. Examples of its output are shown
in Figure 1 (b) and Figure 2 (b). As we can see, they
represent the spatial distribution of temperature as a
low-resolution image. Since the images only show
the rough shape of a body with no texture, we cannot
easily identify the individual. Therefore, as illustrated
in Figure 4, we can use the sensor to switch on/off a
room light by waving our hand toward it without pri-
vacy concerns.
In order to realize the gesture interface, we need
to detect a gesture from an image sequence. In this
paper, we propose a method for hand waving ges-
ture detection using a far-infrared sensor array. The
detection process segments the image sequence and
classify each subsequence whether it is a hand wav-
ing gesture or not. To accurately classify the gesture
using the low resolution and noisy sensor, the ges-
ture and background clutter should be distinguished.
Therefore, as contributions, we introduce the follow-
ing concepts:
• “Thermal Region of Interest (TRoI)” that focuses
on the range of human body temperature to em-
phasize the human body.
• “Spatial Region of Interest (SRoI)” that focuses
on the region with target motion to eliminate the
others.
2 RELATED WORKS
Hosono et al. proposed a method for human track-
ing using a far-infrared sensor array (Hosono et al.,
2015). This method tracks a human in low-resolution
thermal images, but it does not target gesture recogni-
tion.
There are some researches related to vision-based
gesture recognition using a visible-light camera. Fujii
et al. proposed a method that focused on the change
of arm directions during a gesture (Fujii et al., 2014).
They extrapolated arm directions from joint points of
the human body captured by Microsoft’s Kinect sen-
sor (Shotton et al., 2013). Mohamed et al. proposed
a method of tracking a hand trajectory (Alsheakhali
et al., 2011). This method detected its user’s hands
based on skin tone and motion information. However,
in case of far-infrared sensor arrays, it is difficult to
detect the joint position clearly because the captured
thermal image is in very low-resolution. In addition,
the far-infrared sensor array cannot capture color in-
formation. Thus, it is difficult to apply these methods
directly to images captured from the far-infrared sen-
sor array.
Takahashi et al. and Cutler et al. proposed a
method of detecting a periodic motion from low-
resolution images by the Discrete Fourier Transform
(Takahashi et al., 2010) (Cutler and Davis, 1998).
The former method applies it to a time series of in-
tensity values and the latter method applies the seg-
mented object’s self-similarity. However, in case of
far-infrared sensor arrays, it is difficult to detect the
periodic gesture because noise appears in the captured
images. Therefore, these methods are not suitable for
being applied to far-infrared sensor arrays.
VISAPP 2016 - International Conference on Computer Vision Theory and Applications
546
⤠ࡾ㎸ࡳ࠶ࡾ
⤠ࡾ㎸ࡳ࡞ࡋ
(a) Visible-light image
Υ
Υ
26.5Υ
29.5Υ
Υ
Υ
Υ
Υ
26.5Υ
29.5Υ
15.0
30.0
(b) Thermal image before (c) Thermal image after
weighting weighting
Figure 5: Example of the effect of focusing on TRoI.
3 HAND WAVING DETECTION
WITH THERMO-SPATIAL
REGIONS OF INTEREST
There are two difficulties to detect a hand waving ges-
ture with a far-infrared sensor array.
One is to separate the hand waving gesture from
noisy images. This noise is caused by heat sources in
the background except for the user’s body. An exam-
ple of the output image when there are heat sources in
the background is shown in Figure 5 (b). To empha-
size the human body, we introduce “Thermal Region
of Interest (TRoI)”. The TRoI emphasizes the differ-
ence between the user’s body and the background.
Pixel values are weighted according to the user’s body
temperature.
The other is to localize the motion region from
the human body region in an image of the far-infrared
sensor array because it only captures the rough shape
of the body. To localize the motion region that in-
cludes an arm for hand waving detection, we intro-
duce “Spatial Region of Interest (SRoI)”. The SRoI
restricts the spatial region for detection.
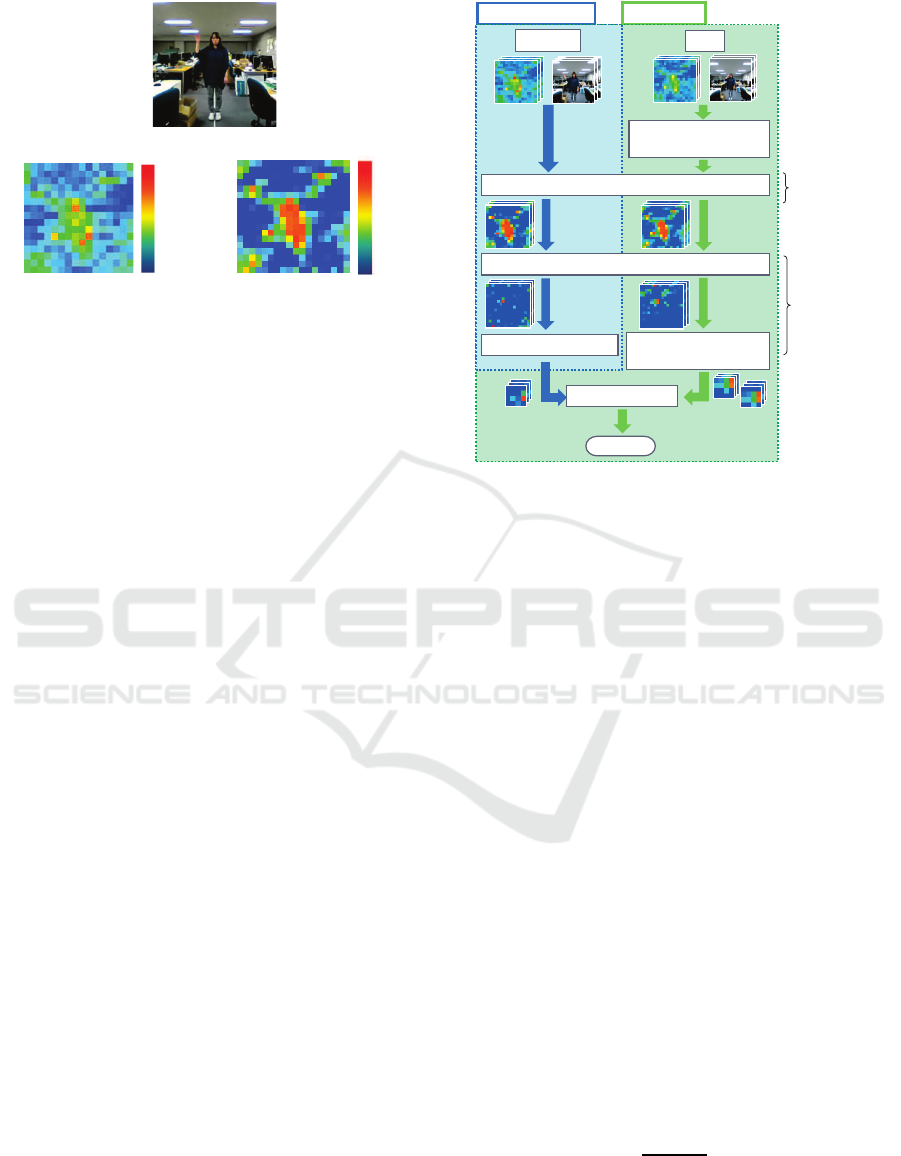
3.1 Process Flow of the Proposed
Method
As a reference sequence, we assume that an image se-
quence of a hand waving gesture of an user in given.
The proposed method detects the hand waving gesture
by matching the reference sequence with an input im-
age subsequence segmented by the temporal window
scan. The input image subsequence is classified ac-
cording to whether it is a hand waving gesture or not.
The process flow is illustrated in Figure 6. It consists
Template
generation
Classification
Reference
Input
Alignment based on
human body region
Weight by temperature
Calculate inter-frame difference
Gesture region cropping
Candidate gesture region
cropping
Template matching
Result
Thermal Region of
Interest
(TRoI)
Spatial Region of
Interest
(SRoI)
Template
Candidates
Υ
Υ
Figure 6: Process flow of the proposed method.
of template generation and classification.
In the template generation, to emphasize the hu-
man body, pixel values of the reference image se-
quence are weighted according to the TRoI. In addi-
tion, to eliminate other parts of the body than the arm,
the gesture region is cropped as a template according
to the SRoI.
In the classification, a template-matching-based
detection process with a Dynamic Time Warping
(DTW)-based distance metric is performed on each
input sequence. DTW is performedbetween the refer-
ence sequence and a subsequence cut out from the in-
put sequence. If the distance is smaller than a thresh-
old, the process classifies the sequence as a hand wav-
ing gesture. Each process is described in detail in the
following sections.
3.2 Template Generation
3.2.1 Thermal Region of Interest (TRoI)
To emphasize human body regions, the proposed
method weights pixel values of the reference image
sequence according to the human body temperature.
The weighted value is defined as follows:
R
′( j)
x
=
exp
−
|R
( j)
x
−T
r
|
2
2
R
( j)
x
(R
( j)
x
< T
r
)
R
( j)
x
(otherwise)
(1)
Hand Waving Gesture Detection using a Far-infrared Sensor Array with Thermo-spatial Region of Interest
547

where R
( j)
x
is the value of the target pixel x in the j-th
frame. T
r
is the estimated value of the human body
temperature, which is calculated as the upper quartile
of pixel values sorted in ascending order in the human
body region in the first frame. Here, the human body
region in an image is bounded by a rectangle, which
is annotated manually. This emphasizes the human
body region while suppressing influence of other heat
sources except for the human body.
Figure 5 (c) shows an example of an image
weighted by Equation (1). We can see that the differ-
ence of the human body and the background becomes
clearer.
3.2.2 Spatial Region of Interest (SRoI)
To localize the motion region, the proposed method
extracts the inter-frame difference and crops the re-
gion to be used for the gesture classification. Let R
′′
denote the inter-frame difference value of two succes-
sive frames in the reference sequence. It can be writ-
ten as follows:
R
′′( j)
x
= R
′( j)
x
− R
′( j−1)
x
(2)
The gesture region in the difference images are
cropped as a template for gesture detection.
3.3 Classification
3.3.1 Normalization of Human Body Region
The size of a human body in an image captured by the
far-infrared sensor array vary depending on the rela-
tive distance between the human body and the sensor.
So we need to normalize the human body size of an
input with the reference. When the human body size
in an input image is smaller than the human body size
in the reference image sequence, we expand it with
bicubic image interpolation. On the other hand, when
the input human body size is larger than the reference
human body size, to suppress aliasing, it is expanded
first and then shrunk to the same size as the reference
human body size by downsampling.
3.3.2 Template Matching
The proposed method detects a hand waving gesture
as follows:
1. Crop candidate gesture regions in the difference
images from the input sequence.
2. Calculate the distance between the template and
each of the candidate gesture regions.
3. Classify each candidate as a hand waving gesture
if the distance is smaller than a given threshold.
An input sequence is preprocessed as same as the
reference sequence, that is, it is emphasized by the
human body temperature and inter-frame difference
is calculated. Candidate gesture regions are cropped
from the input sequence by the same process applied
to the reference sequence. However, the exact loca-
tion of the gesture region in the input sequence is not
known. Therefore, several candidate gesture regions
are cropped from the input sequence. The cropping
position is determined based on the relative position
between the human body region and the gesture re-
gions in the reference sequence.
Here, the distance is calculated with a DTW-based
distance metric. The distance D(R
′′
, I
′′
) is defined as
follows:
D(R
′′
, I
′′
) = min
c
g
c
(R
′′(J)
, I
′′(K)
)
L
(3)
where J and K denote the length of the reference and
the input sequences respectively, g
c
(R
′′(J)
, I
′′(K)
) de-
notes the distance between the template and the can-
didate c, and L denotes the path length based on the
result of the DTW. We define g
c
(R
′′( j)
, I
′′(k)
) as fol-
lows:
g
c
(R
′′( j)
, I
′′(k)
)
= min
g
c
(R
′′( j−1)
, I
′′(k)
) + d(R
′′( j)
, I
′′(k)
)
g
c
(R
′′( j−1)
, I
′′(k−1)
) + d(R
′′( j)
, I
′′(k)
)
g
c
(R
′′( j)
, I
′′(k−1)
) + d(R
′′( j)
, I
′′(k)
)
(4)
The distance between frames R
′′( j)
and I
′′(k)
is defined
as follows:
d(R
′′( j)
, I
′′(k)
)
=
N
∑
n=1
||R
′′( j)
x
n
− I
′′(k)
x
′
n
||
2
=
N
∑
n=1
(||R
′′( j)
x
n
||
2
− 2R
′′( j)
x
n
I
′′(k)
x
′
n
+ ||I
′′(k)
x
′
n
||
2
) (5)
where N is the number of pixels in the gesture re-
gion. To make it robust to temperature variations of
the human body and the background depending on
capturing environments, pixel values of these images
are normalized so that the average becomes 0 and the
variance becomes 1. Therefore, Equation (5) is sim-
plified as follows:
d(R
′′( j)
, I
′′(k)
) =
N
∑
n=1
2(1− S(R
′′( j)
x
n
, I
′′(k)
x
′
n
)) (6)
VISAPP 2016 - International Conference on Computer Vision Theory and Applications
548
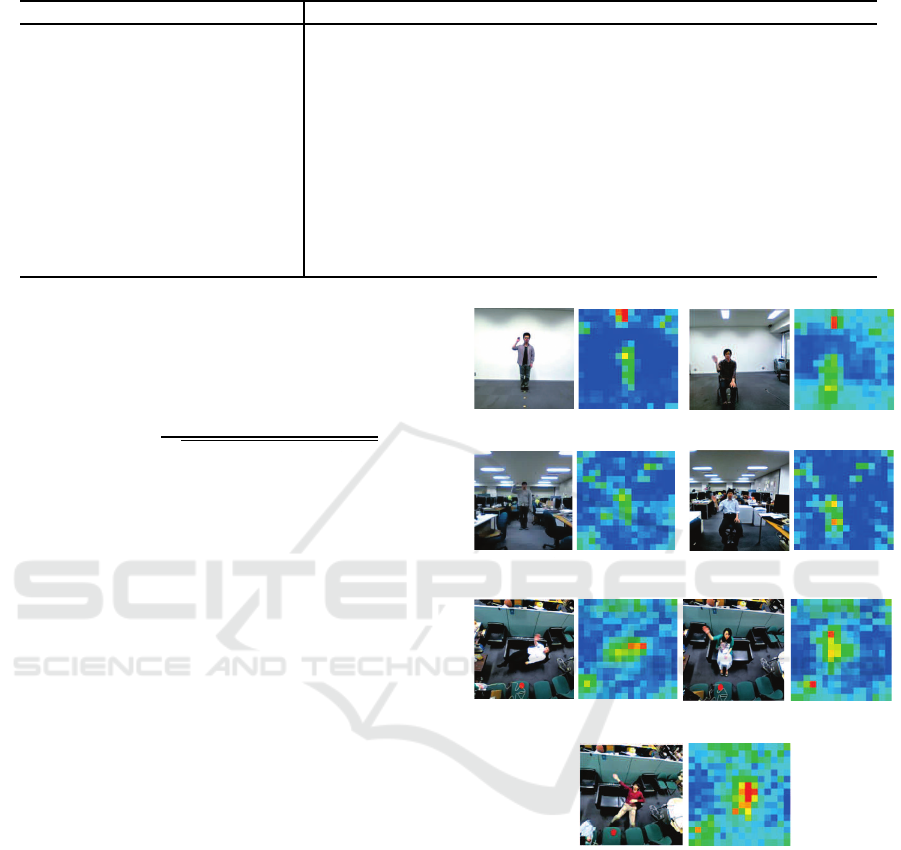
Table 1: Datasets used in the experiment.
Data group A B C
Background heat source — X —
Sensor position Front Front Above
Observation distance (reference) 150 cm 150 cm 200 cm
Observation distance (inputs) 90‘270 cm 90‘270 cm 200 cm
Input gesture
Hand wave, Hand wave, Hand wave,
Stretch, Twist, Stretch, Twist, Stretch, Twist,
Scratch one’s head, Scratch one’s head, Role over,
Cross one’s arms Cross one’s arms Pick up
Pose Standing, Sitting Standing, Sitting Lying, Sitting, Relaxing
#
of persons 6 5 3
#
of datasets 11 13 8
where S(R
′′( j)
x
n
, I
′′(k)
x
′
n
) is a Normalized Cross-
Correlation (NCC) function defined as follows:
S(R
′′( j)
x
n
, I
′′(k)
x
′
n
) =
N
∑
n=1
R
′′( j)
x
n
I
′′(k)
x
′
n
s
N
∑
n=1
(R
′′( j)
x
n
)
2
×
N
∑
n=1
(I
′′(k)
x
′
n
)
2
(7)
4 EXPERIMENT
To confirm the effectiveness of the proposed method,
we conducted an experiment. We captured sequences
using a far-infrared sensor array (Thermal sensor
D6T-1616L by OMRON Corp.). The sequences in-
cluded several persons waving his/her hand or not.
The frame rate was 10 fps. We describe below the
dataset and the experimental conditions, and then re-
port and discuss the results from the experiment.
4.1 Datasets
The target gesture in this experiment was “wave the
right hand twice during approximately 4 seconds”.
We collected 32 datasets, where a dataset consisted
of a reference sequence and a number of input se-
quences. The reference sequence captured a subject
performing the hand waving gesture. The input se-
quences were sampled from the video capturing a
subject performing the gesture. Environment, sub-
ject, and his/her pose were varied and fixed among
each dataset. They were divided into three groups by
environments.
• Group A: Simple situation from the front
• Group B: Cluttered situation from the front
• Group C: Captured from the ceiling
(a) Standing (Group A)
(b) Sitting (Group A)
(c) Standing (Group B) (d) Sitting (Group B)
(e) Lying (Group C)
(f) Sitting (Group C)
(g) Relaxing (Group C)
Figure 7: Examples of images from the datasets.
The details of the capturing conditions are summa-
rized in Table 1, and examples from the datasets are
shown in Figure 7.
4.2 Experimental Condition
In the experiment, we evaluated the performance of
the gesture classification. To analyze the effective-
ness of the thermal and spatial regions of interest, we
compared the proposed method with its two Varia-
tions, 1, 2, and the BaseLine. To confirm the effec-
tiveness of the proposed method, we compared it with
Hand Waving Gesture Detection using a Far-infrared Sensor Array with Thermo-spatial Region of Interest
549
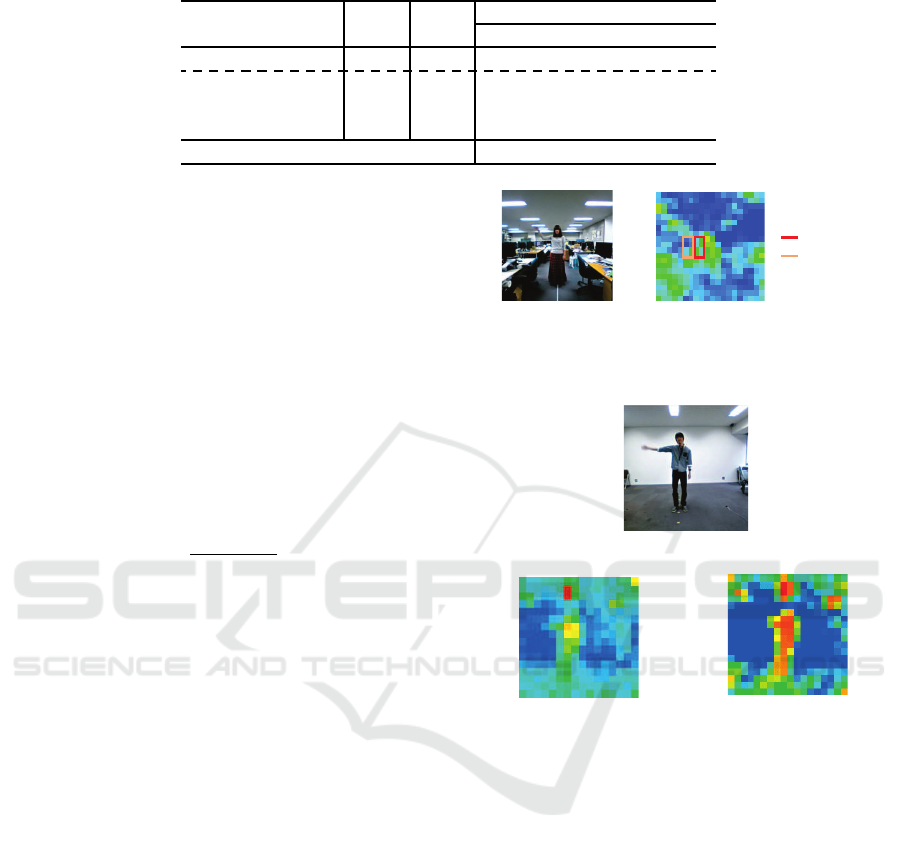
Table 2: Experimental results (Maximum classification rate).
Data group
TRoI SRoI A B C All
Proposed method X X 0.79 0.79 0.91 0.82
Variation 1 - X 0.82 0.77 0.87 0.81
Variation 2 X - 0.77 0.70 0.84 0.76
BaseLine - - 0.79 0.74 0.87 0.79
Comparative method (DFT) 0.62 0.59 0.59 0.60
a Comparative method (Takahashi et al., 2010). The
conditions of these methods are as follows;
• Proposed method: Using both SRoI and TRoI.
• Variation 1: Using only SRoI
• Variation 2: Using only TRoI
• BaseLine: Using neither SRoI nor TRoI
• Comparative method: Using Discrete Fourier
Transform (DFT) (Takahashi et al., 2010)
Instead of using the SRoI, Variation 2 and BaseLine
used the region including the whole body region for
the matching. We used the maximum classification
rate C as a criterion to evaluate each method, defined
as follows:
C =
#TP
#TP+ #FP
(8)
where
#
TP represents the number of true positivesand
#
FP represents the number of false positives.
4.3 Results and Discussion
The results are shown in Table 2. It shows the average
of the maximum classification rates for each group.
As shown in this table, the proposed method achieved
the best performance in almost all cases.
The SRoI worked effectively in Groups A and B.
Although the input images which were captured by
the far-infrared sensor array were noisy due to the air
flow, the proposed method could reduce the noise by
the SRoI. We confirmed that the distance was smaller
when the proposed method successfully classified the
target gesture. Therefore, we can say that it became
easier to separate the target gesture with the others.
The TRoI was effective by combining it with the
SRoI for all groups. This helped the proposed method
determine gesture regions accurately. It seems that the
influence of other heat sources was reduced and the
human body region was emphasized by focusing on
the TRoI. Example of images that the TRoI worked
effectively is shown in Figure 8. In some cases, ges-
ture regions were localized incorrectly where it was
similar to the human body temperature. On the other
hand, the TRoI made it possible to localize the ges-
ture area correctly because it increased the influence
Υ
Υ
With TRoI
Without TRoI
Υ
Υ
(a) Visible-light image (b) Difference in the position
of the gesture area.
Figure 8: Example of images that the TRoI was effective.
(a)Visible-light image
(b) Thermal image before
weighting
(c) Thermal image after
weighting
Figure 9: Example of images that the TRoI was not effec-
tive.
of temperature changes around the human body tem-
perature. The TRoI played a role that helps the SRoI.
Example of images that the TRoI was not effective
are shown in Figure 9. Although we can see the arm
in Figure 9 (a), after focusing on the TRoI, it became
difficult to find the arm in Figure 9 (b). It seems that
the arm region was weakened by the TRoI because the
temperature difference between the arm and the body
was larger than that for other subjects. We can say
that the classification failed because the temperature
of the arm region became similar to the background
temperature.
The comparative method focused on the period-
icity of the time series of the pixel value. However,
the input images which were captured by the far-
infrared sensor array were noisy. Therefore, the ac-
curacy of the comparative method decreased because
VISAPP 2016 - International Conference on Computer Vision Theory and Applications
550

it was easily affected by noise. Meanwhile, the pro-
posed method was able to classify the hand waving
gesture even if noise was included in the output im-
ages.
5 CONCLUSION
In this paper, we proposed a hand waving gesture de-
tection method using a far-infrared sensor array. The
proposed method matched a reference sequence cap-
tured beforehand with an input sequence. We reduced
the influence of other heat sources by the TRoI. We
also reduced noise by the SRoI. Experimental results
showed that the SRoI was effective in the reduction of
noise. Furthermore, the TRoI was effective by com-
bining it with the SRoI.
As future work, we will modify the TRoI to fur-
ther improve the classification performance of the
proposed method. We will also consider a method
to improve the estimation of the human body temper-
ature used in the TRoI. In addition, we need to track
humans for gesture recognition. We expect to realize
a practical gesture recognition system by combining
the proposed method with a tracking method such as
(Hosono et al., 2015).
ACKNOWLEDGEMENTS
Parts of this research were supported by MEXT,
Grant-in-Aid for Scientific Research.
REFERENCES
Alsheakhali, M., Skaik, A., Aldahdouh, M., and Alhelou,
M. (2011). Hand gesture recognition system. In Proc.
Int. Conf. on Information & Communication Systems
2011, pages 132–136.
Cutler, R. and Davis, L. (1998). View-based detection and
analysis of periodic motion. In Proc. 14th Int. Conf.
on Pattern Recognition, volume 1, pages 495–500.
Fujii, T., Lee, J. H., and Okamoto, S. (2014). Gesture recog-
nition system for human-robot interaction and its ap-
plication to robotic service task. In Proc. Int. Multi-
Conf. of Engineers and Computer Scientists 2014, vol-
ume 1, pages 63–68.
Hosono, T., Takahashi, T., Deguchi, D., Ide, I., Murase, H.,
Aizawa, T., and Kawade, M. (2015). Human tracking
using a far-infrared sensor array and a thermo-spatial
sensitive histogram. In Jawahar, C. and Shan, S.,
editors, Computer Vision – ACCV 2014 Workshops,
volume 9009 of Lecture Notes in Computer Science,
pages 262–274. Springer International Publishing.
Jing, L., Zhou, Y., Cheng, Z., and Huang, T. (2012).
Magic ring: A finger-worn device for multiple ap-
pliances control using static finger gestures. Sensors,
12(5):5775–5790.
Lee, H.-K. and Kim, J. H. (1999). An HMM-based thresh-
old model approach for gesture recognition. IEEE
Trans. on Pattern Analysis and Machine Intelligence,
21(10):961–973.
Mahbub, U., Imtiaz, H., Roy, T., Rahman, M. S., and Ahad,
M. R. (2013). A template matching approach of one-
shot-learning gesture recognition. Pattern Recogni-
tion Letters, 34(15):1780–1788.
Ohira, M., Koyama, Y., Aita, F., Sasaki, S., Oba, M.,
Takahata, T., Shimoyama, I., and Kimata, M. (2011).
Micro mirror arrays for improved sensitivity of ther-
mopile infrared sensors. In Proc. 24th IEEE Int. Conf.
on Micro Electro Mechanical Systems, pages 708–
711.
Shotton, J., Girshick, R., Fitzgibbon, A., Sharp, T., Cook,
M., Finocchio, M., Moore, R., Kohli, P., Criminisi,
A., Kipman, A., and Blake, A. (2013). Efficient hu-
man pose estimation from single depth images. IEEE
Trans. on Pattern Analysis and Machine Intelligence,
35(12):2821–2840.
Takahashi, M., Irie, K., Terabayashi, K., and Umeda, K.
(2010). Gesture recognition based on the detection
of periodic motion. In Proc. Int. Symposium on Op-
tomechatronic Technologies, pages 1–6.
Hand Waving Gesture Detection using a Far-infrared Sensor Array with Thermo-spatial Region of Interest
551
