
State of the Art in Skinning Techniques for Articulated Deformable
Characters
Nadine Abu Rumman
1
and Marco Fratarcangeli
2
1
Sapienza University of Rome, Rome, Italy
2
Chalmers University of Technology, Gothenburg, Sweden
Keywords:
Character Animation, Skinning, Skeleton-Based Animation, Physics-Based Animation.
Abstract:
Skinning is an indispensable component of the content creation pipeline for character animation in the context
of feature films, video games, and in the special effects industry. Skinning techniques define the deformation
of the character skin for every animation frame according to the current state of skeletal joints. In this state of
the art report, we focus on the existing research in the areas of skeleton-based deformation, volume preserving
techniques and physically based skinning methods. We also summarize the recent research in deformable
and soft bodies simulations for articulated characters, and discuss various geometric and examples-based
approaches.
1 INTRODUCTION
In character animation, skinning is the process of
defining how the geometric surface of the charac-
ter deforms according to a function of the skeletal
poses. Creating believable and compelling skin de-
formations is one of the main challenges of animated
feature films, computer games, and interactive appli-
cations. Traditionally, bone transformations describe
the position and orientation of the joints, and the skin
deformation is computed by linearly blending bone
transformations to the skin. This technique is called
“skeletal subspace deformation”, also known as lin-
ear blend skinning (LBS), and it has been described
for the first time in (Magnenat-Thalmann et al., 1988).
However, such simple and linear blending to the bone
transformations cannot be expected to capture com-
plex deformations. Moreover, because the deforma-
tion is restricted to the subspace of the affine trans-
formation of the bones, this method has problems
deforming the skin near joints due to volume loss
or the well-known “candy-wrapper” artefacts. By
replacing linear blending with a nonlinear blending
(dual quaternion skinning, (Kavan et al., 2007)), the
artefacts of LBS can be completely avoided. How-
ever, dual quaternion blending suffers from an un-
desirable joint-bulging artefact while bending, which
requires artistic manual work to be fixed. Although
these methods achieve real-time performance, they
are purely kinematic lacking of secondary motion ef-
fects, such as jiggling motion of fatty tissues and con-
tact deformation effects. In contrast, by employing
a physically based method into the skinning process,
the believability of character motions is highly en-
hanced. Physics-based simulations manage to bring
skeleton-based animation beyond the purely kine-
matic approach by simulating secondary motions like
jiggling, volume preservation and contact deforma-
tion effects. These secondary motions enrich the vi-
sual experience of the animation and are essential for
creating appealing characters animation. Despite of-
fering such realistic effects, physically based simula-
tion is computationally demanding and complex, thus
it is usually avoided in interactive applications. Fur-
thermore, physically based methods require human
intervention to generate input data, which describe the
physical states, before the problem can be solved by
a computer program. In most cases, such preparation
is tedious and the artist must master the knowledge of
both the given software and the underlying physics of
the phenomenon. The key challenge of producing be-
lievable deformations is to satisfy the conflicting re-
quirements of real-time interactivity and believabil-
ity. Believability requires achieving sufficient defor-
mation detail, which means capturing the full range
of desired effects, namely jiggling, volume preserva-
tion, muscle bulging and skin contact deformations.
Producing these deformations demand at least an or-
der of magnitude more computation time than current
interactive deformation systems.
200
Rumman, N. and Fratarcangeli, M.
State of the Art in Skinning Techniques for Articulated Deformable Characters.
DOI: 10.5220/0005720101980210
In Proceedings of the 11th Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2016) - Volume 1: GRAPP, pages 200-212
ISBN: 978-989-758-175-5
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

The aim of this paper is to provide a comprehen-
sive survey on the existing skinning techniques in lit-
erature. These can be classified into three categories:
skeleton-based deformation, volume preserving skin-
ning and physics-based skinning methods. We dis-
cuss the existing skinning methods and how they ad-
dress the above-mentioned problems, and we also
highlight the advantages and disadvantages of each
method. Skinning methods can be also classified into
smooth skinning, data-driven skinning, and physics-
based skinning.
2 SKELETON-BASED SKINNING
METHODS
The most common approach for deforming articu-
lated character’ skin is to define the surface geome-
try as a function of an underlying skeletal structure.
Due to the simplicity, intuitive manipulation, and the
ability to quickly solve inverse-kinematics on a small
subspace (i.e., the skeleton), skeleton-based methods
are very popular and widely used in the animation
industry (Le and Deng, 2012). When modeling a
skeleton-based deformation, the challenge is to ob-
tain high-quality skin deformations in real-time given
an arbitrary skeletal posture. The current skeleton-
based deformation techniques can be divided into two
sections: geometry-based methods (Section 2.1) and
example-based methods (Section 2.2).
2.1 Geometric Skinning Techniques
In geometric skinning techniques, skeleton-to-skin
binding is defined in a direct, geometrical way. Ge-
ometric approaches to deform articulated characters
have shown reasonable results at interactive rates.
We start by discussing the standard real-time method
“skeletal subspace deformation”, also known as
linear blend skinning (LBS) presented in (Magnenat-
Thalmann et al., 1988). This method has been widely
adopted in real-time applications such as games, for
its computational efficiency and straightforward GPU
implementation. Unfortunately, linear blend skinning
suffers from visual artefacts like self intersection,
volume loss or the well-known “candy-wrapper”
artefact
1
(see Fig. 1), which are the result of the
linear nature of the algorithm, since the linear
interpolation of the transformation matrices is not
equivalent to the linear interpolation of their rotations
1
The “candy-wrapper” artefact is the skin collapsing
effect exhibited by linear blend skinning (Magnenat-
Thalmann et al., 1988).
(Alexa, 2002). The limitations of LBS have been
extensively studied, where many techniques have
been proposed to avoid its artefacts. One possibility
is to enrich the space of skinning weights, leading
to methods which are still linear but offer a wider
range of deformations. These methods are called
multi-linear skinning techniques (Wang and Phillips,
2002; Mohr and Gleicher, 2003), in which the
extra weights are learned from input examples and
regularization is used to prevent overfitting. Merry
et al. propose a multi-linear skinning model called
Animation Space (Merry et al., 2006), which uses 4
weights per vertex-bone pair. However, this increase
in the number of weights carries an additional cost
in time and space, as well as parameter passing.
While linear skinning techniques are popular due to
their efficient implementations, they cannot entirely
remove the “candy-wrapper” artefact, which is in all
cases noticeable under large joint rotations. For a
comprehensive survey on linear skinning techniques,
we refer the interested reader to (Jacka et al., 2007).
Selecting good skinning weights is critical to avoid
the artefacts and generate more natural deformations.
Recently, an automatic computation of skinning
weights was presented in (Dionne and de Lasa,
2013). In their method, the influence weights are
determined using geodesic distances from each bone,
which makes the inverse-distance weights shape-
aware and can even work with production meshes that
may contain non-manifold geometry. Despite that
associating skinning weights with the mesh vertices
can be done automatically, this method tends to either
increase or decrease the volume around joints.
By replacing linear blending with nonlinear blend-
ing (Hejl, 2004; Kavan and Z
´
ara, 2005; Kavan
et al., 2007), the “candy-wrapper” artefact can be
completely avoided. Nonlinear skinning methods
convert the affine rigid transformation matrices to
< quaternion,translation > pairs, which are then
easier to blend than their matrix equivalents (Hejl,
2004; Kavan and Z
´
ara, 2005). In (Hejl, 2004) some
constraints are imposed on the character’s rigging,
whereas spherical skinning (Kavan and Z
´
ara,
2005) uses a computationally expensive Singular
Value Decomposition (SVD) scheme. The practical
impact of these two methods is limited because
of their dealing with the translational component
of the skinning transformations. In contrast, dual
quaternion skinning (DQS (Kavan et al., 2007)) uses
an approximate blending technique based on dual
quaternions (essentially, two regular quaternions).
Dual quaternion skinning is able to achieve com-
parable speeds to LBS while increasing the visual
State of the Art in Skinning Techniques for Articulated Deformable Characters
201

Figure 1: Demonstrates the artefacts of classic interactive skinning techniques linear blend skinning (LBS) and dual quaternion
skinning (DQS). Linear blend skinning (LBS) is the most widely employed skinning technique, due to its simplicity and
efficiency. Unfortunately, LBS suffers from the “candy-wrapper” artefact while twisting ((a) and (b)). This artefact can be
eliminated by a nonlinear blending method such as dual quaternion skinning (DQS), but DQS produces an unnatural joint-
bulging artefact while bending (c). Observing that LBS does not produce bulging while bending and DQS does not suffer
from the “candy-wrapper” artefact while twisting. (Image taken from (Kavan and Sorkine, 2012)).
quality of the animation. However, it suffers from an
undesired joint bulging
2
artefact (as shown in Fig. 1),
which requires artistic manual work to be fixed.
Manually fixing these artefacts is a a tedious process,
so automatic skinning techniques are becoming
increasingly popular (Baran and Popovi
´
c, 2007;
Kavan et al., 2009; Chen et al., 2011; Jacobson et al.,
2011; Bharaj et al., 2012; Jacobson et al., 2012).
Moreover, an interesting extension of linear blend
skinning called spline-skinning comes from (Yang
et al., 2006; Forstmann and Ohya, 2006; Forstmann
et al., 2007), which often produces better skinning
deformations and suppresses (but not completely
eliminates) the “candy wrapper” artefact. Instead of
using conventional matrix rotations, spline-skinning
represents each bone of the skeleton by a spline.
Furthermore, an appealing extension of DQS that is
successfully applied in a production setting (Disney’s
Frozen), is depicted in (Lee et al., 2013). For a
extensive discussion on nonlinear skinning methods,
we refer the reader to (Kavan et al., 2009). Whilst
all the above-mentioned methods fully define the
surface positions based on skeletal configuration,
they cannot capture secondary motion effects and
skin contact behavior in response to collision. Re-
cently, more advanced geometric skinning methods
were introduced to limit the artefacts of LBS, while
keeping their simplicity. Kavan and Sorkine (Kavan
and Sorkine, 2012) developed a new skinning method
based on the concept of joint-based deformers, which
avoids the artefacts of linear blend skinning as well
as the bulging artefact of dual quaternion skinning.
Jacobson et al. (Jacobson and Sorkine, 2011)
expanded skinning to support bending, stretching and
twisting by using a slight variation on the standard
skinning equations. Impressive skinning results
can be obtained using the technique presented in
2
Joint-bulging is an unnatural skin bulging effect pro-
duced by dual quaternion skinning (Kavan et al., 2007)
while bending.
(Vaillant et al., 2013), which generates visually plau-
sible skin deformations in real-time. Their method
automatically captures contact surfaces between
skin parts without requiring any collision detection
step. Moreover, they extended their framework to
handle local skin contacts and produce the effect of
skin elasticity (sliding effect) (Vaillant et al., 2014).
More recently, (Kim and Han, 2014) proposed a
post processing method for dual quaternion skinning,
which eliminates the joint-bulging artefacts and its
suitable for real-time character animation. In spite
of improvements, geometric skinning techniques
remains purely kinematic, lacking of secondary mo-
tions effects like passive jiggling motion of the fatty
tissues or muscle bulging. In the next section, we
present the most influential example-based skinning
methods which are able to alleviate the limitations of
geometric skinning method and add dynamic effects
to the skin. For a more thorough treatment of these
methods, we refer the reader to (Jacobson et al.,
2014).
2.2 Example-based Skinning Methods
This class of skinning methods can be also called
data-driven methods. In contrast to geometric ap-
proaches, example-based skinning methods permit
more complex skinning effects such as muscle bulges
and wrinkles, while also addressing the artefacts
of linear skinning techniques. These methods take
as input a series of sculpted example poses and
interpolate them to obtain the desired deformation.
One of the first example-based methods is pose space
deformation (PSD, (Lewis et al., 2000)), which
uses a radial basis function to interpolate correction
vectors among the example poses. In pose space
deformation method, pose space is a set of degrees of
freedom of a character’s model which vary between
the example poses. A particular pose is a particular
configuration of these degrees of freedom. A more
GRAPP 2016 - International Conference on Computer Graphics Theory and Applications
202
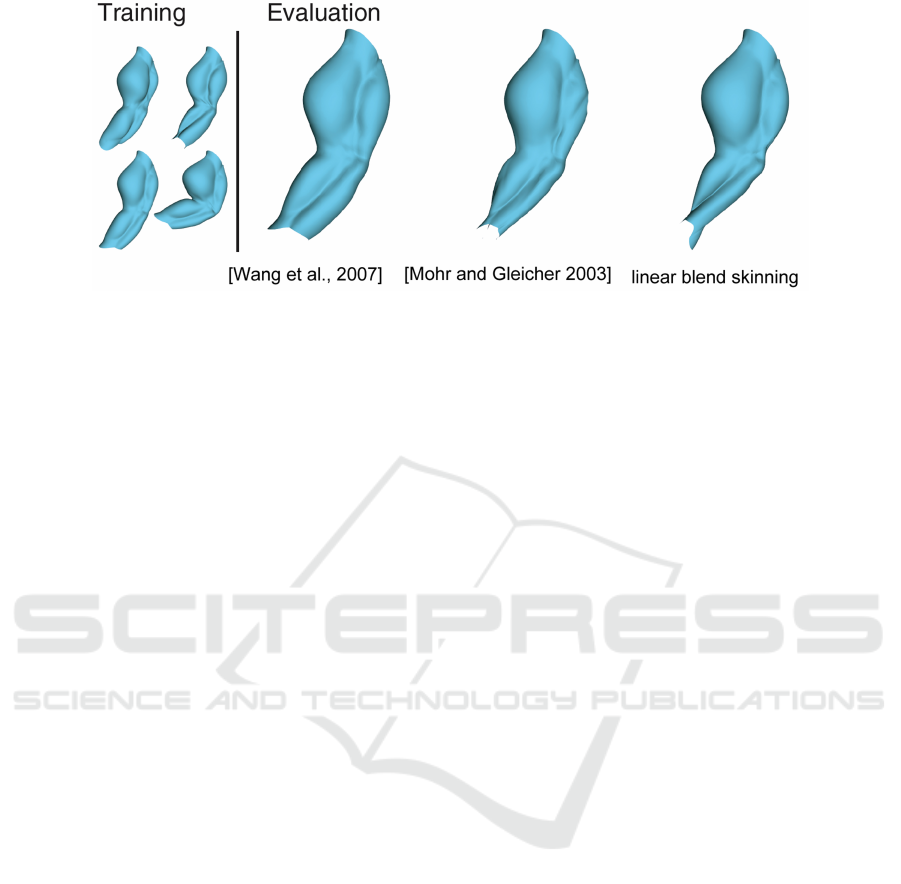
Figure 2: A set of example poses from an anatomically motivated arm model with both bending and twisting at the elbow.
The twisting and muscle bulges are enough to prevent LBS from approximating the examples well. The technique of (Mohr
and Gleicher, 2003) does better, but still differ from the given example poses. The model from (Wang et al., 2007) well-
approximate the examples poses. (Image taken from (Wang et al., 2007)).
sophisticated extension of PSD was presented in
(Sloan et al., 2001). Their method interpolates an
articulated character using example poses scattered
in an abstract space. This abstract space consists
of dimensions describing global properties of the
3D character, such as age and gender, in addition
to dimensions that are used to describe the config-
uration, such as the amount of bend at the elbow
joint. Moreover, PSD was generalized to support
weight in a technique called weighted pose space
deformation (WPSD), in (Kurihara and Miyata,
2004; Rhee et al., 2006)), which largely reduces the
number of required example poses. Although WPSD
can handle large-scale deformations well, it cannot
provide detailed deformation and it requires more
computation than the original pose space deformation
(PSD). In example-based methods, the amount of
memory grows with the number of training examples,
thus they are more popular in animated feature film
(DreamWorks Animation’s Shrek 2) than in real-time
application. To tackle this problem, (Kry et al., 2002)
proposed a method similar in spirit to PSD called
EigenSkin. Instead of using all the displacements
for example poses, they used precomputed principal
components of deformation influences on individual
joints. The resulting algorithm leads to considerable
memory savings and enables to transfer the compu-
tations to the GPU. Despite the fact that pose space
deformation methods are simple to implement, they
require tremendous effort from artists because they
have to create different poses by hand for a wide
variety of examples. Another class of example-based
methods, which is a direct generalization of LBS
but does not require data interpolation, is com-
posed by methods such as single-weight enveloping
(SWE, (Mohr and Gleicher, 2003)) and multi weight
enveloping (MWE, (Wang and Phillips, 2002)).
Single-weight enveloping estimated single weight
per vertex with rigid character bones, with provisions
made for adding additional bones. Multi-weight
enveloping, instead, is based on a linear framework
supporting multiple weights per vertex-bone, and
it provides better approximations than SWE but
at the cost of 12 weights per vertex-bone instead
of 1 weight per vertex-bone as in SWE. However,
linearity has certain benefits: it is fast and it can be
used to derive a measure of average distance across
the space of poses but the example meshes are still
necessary in order to obtain the weights. This class
of methods allows a smaller number of poses to be
used to generate a larger number of deformations. On
the other hand, they introduce an increased number
of weight parameters which must be computed in a
complex process.
As an alternative to using sculpted example poses,
several example-based approaches use scanned or
photographed data. Early work that uses 3D scanned
poses of a human body in character skinning has
been presented in (Min et al., 2000). Additionally,
the method in (Allen et al., 2002) creates a high
quality posable upper body model from range scan
data and markers. In their method, they obtain
deformations corresponding to different poses by
matching a subdivision surface template to the
range data. Recently, more advanced example-based
techniques have been effectively integrated with
mesh deformation algorithms to further improve
the quality of skinning (Wang et al., 2007; Shi
et al., 2008; Schumacher et al., 2012; Le and Deng,
2014). A rotational regression model is proposed
in (Wang et al., 2007), which captures common
State of the Art in Skinning Techniques for Articulated Deformable Characters
203

skinning deformation such as muscle bulging (as
we can see in Fig. 2) and twisting, specifically in
challenging regions such as the shoulders. Park and
Hodgins also introduced an interesting technique that
captures and synthesizes detailed skin deformations
such as bulging and jiggling (Park and Hodgins,
2006; Park and Hodgins, 2008), when a character
performs dynamic activities. They use a very dense
and large set of markers to capture the dynamic
motions. Then, they employ a second-order skinning
scheme followed by a radial basis function of the
residual errors to provide detailed skin deformations.
While high-quality skin deformations can be captured
accurately using scanned data, marker-based motion
capture systems typically have a time-consuming
calibration process and significant hardware and
set-up costs. Example-based skinning methods are
attractive because they can provide rich details from
physical measurements and add realistic secondary
deformation to the skeleton-based animations. Shi
et al. presented an appealing method that is able to
provide the jiggling of the fatty tissues in real-time
by taking a surface mesh and a few sample sequences
of its physical behavior (Shi et al., 2008). Moreover,
the method proposed in (Huang et al., 2006) is
capable of synthesizing high resolution hand mesh
deformation with rich and varying details, from only
14 examples poses. However, these approaches do
not capture detailed soft-tissue deformations on a
wide variety of body shapes. The major drawback
of example-based methods is the need for example
poses. Besides the fact that when the example poses
cannot be captured on a real actor, creating these
poses requires either tremendous effort from an artist,
or a complex physical simulation on a volumetric
version of the skin mesh. In both cases, the mesh
and its associated skeleton at rest are not sufficient,
and further human intervention is required. An
interesting discussion on example-based deformation
methods, can be found in (Feng et al., 2008). In the
next section, we discuss several volume preservation
methods for skinned characters, which have been
proposed to tackle the loss of volume artefact of
linear skinning techniques.
3 VOLUME PRESERVING
SKINNING METHODS
Volume preservation is an important aspect in the
context of skin deformation that has been addressed
in a variety of research papers over the last years.
Volume preservation methods allow artists to correct
the volume changes through the generation of extra
bulges and/or wrinkles. The method that has been
proposed in (Desbrun and Gascuel, 1995) is one
of the first methods to introduce volume preserving
deformation, where they use local volume controllers
to guarantee volume conservation of implicitly de-
scribed soft substances. Moreover, multi-resolution
methods (Guskov et al., 1999; Botsch and Kobbelt,
2003) can preserve surface details by decomposing
a mesh into several frequency bands. Furthermore,
Funck et al. presented an appealing approach that
deforms the mesh vertices based on vector field
integration (von Funck et al., 2006; von Funck et al.,
2008). However, these two methods are either com-
putationally expensive or do not fit into the standard
animation pipeline. Angelidis and Singh developed a
skinning algorithm based on a powerful embedding
into the volumetric space, which enables to preserve
volume locally and globally (Angelidis and Singh,
2007). In their method, a degree of freedom is left
to the artist to control the final shape, although its
combination with skinning weights variation along
the mesh makes this control somewhat indirect.
Recently, (Rohmer et al., 2008; Rohmer et al., 2009)
presented an automatic volume correction method to
model the constant volume behavior of soft tissues.
It corrects the resultant deformations of LBS using
a set of local deformations. In their work, they used
an automatic way to segment an organic shape into a
set of regions corresponding to the main muscle and
fatty tissue areas, in which volume is computed and
locally corrected. Huang et al. employed a nonlinear
version of the volumetric graph Laplacian, which
features nonlinear volume preservation constraints
(Huang et al., 2006). Lipman et al. introduce a
shape and volume preserving mesh editing technique
(Lipman et al., 2007a), where meshes are represented
by moving frames. These frames are scaled during
deformation such that the volumetric shape properties
are preserved.
Several impressive works that create an inner
scaffolding of spring, which resist compression to
maintain volume are described in (Hong et al., 2006;
Zhou et al., 2005). The method in (Zhou et al., 2005)
provides an excellent introduction to these interior
lattice methods. Lattice-Based freeform deformation
(FFD) are widely-used in commercial software
(such as Autodesk 3D Studio Max and Maya) for
providing smooth deformations and preserving the
volume of the skin (Sederberg and Parry, 1986;
Bloor and Wilson, 1990; Coquillart, 1990; Milliron
et al., 2002). For example, Autodesk Maya 2007
supports the notion of flexors. This lattice flexor
uses a local FFD lattice, which can then be driven
GRAPP 2016 - International Conference on Computer Graphics Theory and Applications
204
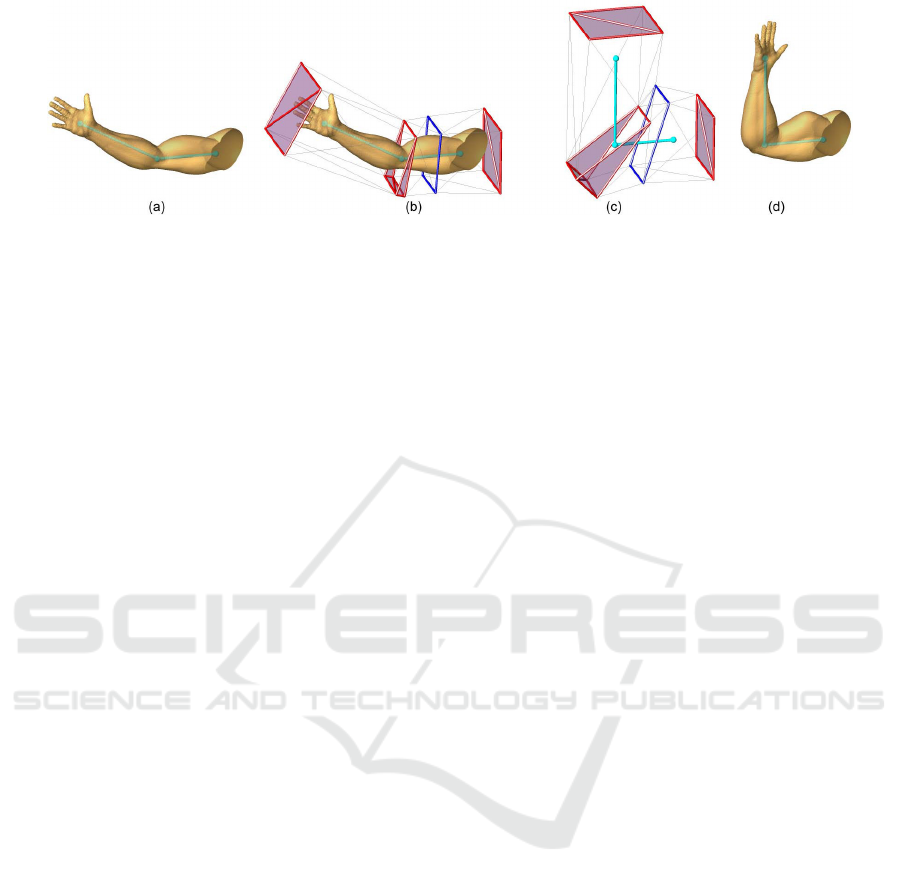
Figure 3: Skinning with cage: (a) Input geometry with skeleton. (b) An initial cage constructed from four templates, which
are associated with the hand joint, elbow joint, upper arm bone, and the shoulder joint. (c) The skeleton deforms the mesh
templates. (d) The geometry is deformed by the cage, yielding a non-pinching elbow and muscle bulging. (Image taken from
(Ju et al., 2008)).
by joint transformations. However, the flexors do not
support skinning transfer and the use of flexors can
require significant setup and tweaking because of the
multitude of lattice points. FFD was first formally
proposed in (Sederberg and Parry, 1986) both as a
representation for free-form solids and as a method
for sculpturing solid models. Using FFD, a complex
character can be deformed by positioning the control
vertices of the coarse control grid. A more general
extension of FFD (EFFD) was later presented by
(Coquillart, 1990). Although lattice-based methods
give the artist the flexibility of creating the desired
deformation, they require additional setup work and
the deformation is sometimes difficult to predict.
On the other hand, cage-based skinning tech-
niques consider an appealing way to control the
deformation of an enclosed fine-detailed mesh and
help to preserve the volume of skin deformations
(Ju et al., 2005; Joshi et al., 2007; Lipman et al.,
2007b; Ju et al., 2008; Savoye and Franco, 2010).
Cage-based techniques can be considered as a gener-
alization of the lattice-based freeform deformation.
Instead of a regular control lattice, a cage is defined
by a fixed-topology control lattice that is fitted
to the character skin. The cage can be seen as a
low-resolution abstraction of the character, which
enables the user to deform a character using a simpler
mesh. Most cage-based deformation methods are
special case of linear blend skinning, where the
handle (cage vertex) transformations are restricted
to be translations and the focus is on choosing the
weights. The method presented in (Ju et al., 2008)
uses cage-based deformations to implement skinning
templates, which offer a flexible design space within
which to develop reusable skinning behavior. In
their method, the skeleton drives the motion of
the cage vertices using an example-based skinning
technique, where the cage smoothly deforms the
character model (see Fig. 3). Joshi et al. proposed
a powerful cage-based deformation method based
on harmonic coordinates (Joshi et al., 2007) for use
in high-end character articulation. Their technique
guarantees that the influence of each cage vertex is
non-negative and falls off with distance as measured
within the cage. It generates a pleasing deformation,
but computing the harmonic coordinates is not easy.
In spite of that, cage-based techniques allow smooth
deformation of skin geometry. Posing the cage
requires manual manipulation of the cage vertices.
For an overview discussion on volume-preserving
deformation methods, we refer the reader to (Nieto
and Susin, 2013). Another promising way to preserve
the volume of the skin and to achieve realistic
deformation is by applying physics-based simulation
into the skin layer around the skeleton. The following
section describes the vast literature on physics-based
methods.
4 PHYSICS-BASED METHODS
In order to model dynamic phenomena, such as the
vibration of fatty tissues, muscles bulging and skin
contact deformations due to collisions, the animator
must configure the deformation for each keyframe.
While manually posing a character for each anima-
tion keyframe allows artists to create such realistic
effects, this process is tedious. Therefore, an alter-
native method is to employ physics into the skinning
process, which highly enhances the believability and
realism of character motions. Accordingly, physics-
based simulation manages to bring skeleton-driven
animation beyond the purely kinematic approach by
simulating secondary motions, such as jiggling of soft
tissues when the character is moving. Those sec-
ondary motions enrich the visual experience of the an-
imation and are essential for creating appealing char-
acters for movie productions and virtual reality ap-
plications. After the pioneering work of Terzopou-
State of the Art in Skinning Techniques for Articulated Deformable Characters
205

los et al. (Terzopoulos et al., 1987) and concurrently
Lasseter’s animation principle “squash and stretch”
(Lasseter, 1987). Physical simulation has taken an im-
portant role in the animated feature film industry and
computer games (Goktekin et al., 2007), where many
physically based methods encouraged to simulate soft
bodies or add dynamic effects to the skin. In the fol-
lowing subsections, we first discuss soft body simu-
lations in (Section 4.1), and then physically based
skinning methods in (Section 4.2).
4.1 Deformable and Soft Bodies
Simulations
Simulating soft bodies can be achieved in different
ways, and the design choice often has to balance
the required accuracy and performance (Moore and
Molloy, 2007). The most popular techniques for
simulating soft bodies in computer animation are
force-based methods. In particular, most of the tech-
niques used to simulate dynamics rely on mass spring
systems, because of the simplicity and efficiency.
The general idea is to represent the vertices of the
mesh as mass points, governed by Newton’s second
law of motion, and the edges as elastic massless
links (spring). Hence, the mesh is deformed when
the lengths of the elastic links change. This happens
when the relative position of the mass points changes
due to external forces. Mass-spring systems are
based on a local description of the material, in which
the physics of such systems is straightforward and
the simulator is easy to implement. However, to
simulate a particular material, it is important to select
carefully the parameters of the springs, such as the
stiffness and damping. Despite that these systems
are fairly easy to implement, they suffer from insta-
bility and overshooting problems under large time
steps. Moreover, mass-spring systems are often not
accurate, since they are strongly topology dependent
and are not built based on elasticity theory. On the
other hand, finite element methods (FEM) allows to
model elastic materials, in which both the masses
and the internal and external forces are lumped to
the vertices. The vertices in the mesh are treated
like mass points in a mass spring system while each
element acts like a generalized spring connecting
all adjacent mass points. The methods presented in
(Terzopoulos et al., 1987; Chadwick et al., 1989) are
the first to demonstrate the effectiveness of compara-
tively simple mass-spring based approaches. In their
methods, they applied the Lagrangian equations of
motion using a finite difference scheme to simulate
elastic objects with regular parametrizations. Here,
the physical material properties can be described
using only few parameters that are used to model soft
bodies in an accurate manner. Unlike mass-spring
systems, finite element methods are easy to simulate
for any particular material. This makes things easier
for artists in charge of modelling different types of
soft bodies. Unfortunately, finite element methods
are avoided in real-time applications, because they
are computationally expensive and complex to
implement. Various methods have been proposed to
address the drawbacks of mass-spring systems and
finite element methods (Gourret et al., 1989; Turner
and Thalmann, 1993; Lee et al., 1995; Popovi
´
c et al.,
2003; Larboulette et al., 2005). A comprehensive
survey of Nealen et al. (Nealen et al., 2006) provides
the details about these techniques. The concept of
employing dynamic simulations into skinning for
the purpose of character animation was introduced
over two decades ago (Girard and Maciejewski,
1985), where many techniques were proposed to
reduce the accuracy of the simulation to help improve
performance and interactivity. Capell et al. (Capell
et al., 2002) used a volumetric finite element mesh
to represent the deformation of skin, driven by the
underlying skeleton motion. They extended their
method to include rigging forces, which guide the
deformation to a desired shape (Capell et al., 2005).
In their method, they effectively handled the effect
of skin movement by using skeletal constraints, but
by using forces that can violate the conservation of
momentum makes their simulation unstable under
large time steps. Shinar et al. (Shinar et al., 2008)
presented a framework of a two-way coupling be-
tween rigid and deformable bodies, in which they use
a time integration scheme for solving dynamic elastic
deformations in soft bodies interacting with rigid
bodies. However, their method does not facilitate
the development of an interactive animation system,
because of the massive computation required for the
finite elements representing the deformable body. In
contrast, a possible way to accelerate the simulation
of soft bodies is to focus on the surface rather than the
volume (Bro-nielsen and Cotin, 1996). In particular,
Galoppo et al. (Galoppo et al., 2007) presented a
fast method to compute the skin deformation on the
surface of a soft body with rigid core. Their formula-
tion only considers the elastic energy from skin-layer
deformation, and does not include the deformation
inside the volume. This may lead to inaccuracies
when capturing pose-dependent deformations. All
the above methods are only valid for small deforma-
tions and are unsuitable for an articulated character’s
large deformations. On the other hand, M
¨
uller et
al. (M
¨
uller et al., 2002) achieved a good real-time
performances for large rotational deformations,
GRAPP 2016 - International Conference on Computer Graphics Theory and Applications
206

Figure 4: Employing dynamic simulation into skinning process allows two-way interactions between the skeleton, the skin
geometry, and the environment at interactive rates. (Image taken from (Liu et al., 2013)).
by using a pre-computed linear stiffness matrix to
generate the deformations; their method is simple
and rotationally invariant. Recently, Kim and Pollard
(Kim and Pollard, 2011) proposed an approach
relying on finite element method to simulate the skin
deformation, able to handle both one-way and two-
way simulations. Their method generates compelling
dynamic effects and the deformations are obtained at
near interactive rate. The method proposed in (Gilles
et al., 2011) simulates dynamic skinned deformation
models using frame-based degrees of freedom with
unreduced force evaluation. Jain and Liu presented a
robust approach that realistically simulate characters
with soft tissue at the site of contact, where they used
two-way coupling between articulated rigid bodies
and deformable objects (Jain and Liu, 2011). Liu
et al. developed a framework that simulates and
controls skeleton driven soft body characters (Liu
et al., 2013). Their method couples the skeleton
dynamics and the soft body dynamics to enable
two way interactions between the skeleton, the skin
geometry, and the environment at interactive rates (as
we can see in Fig. 4).
4.2 Physically based Skinning
Physics-based methods are the natural choice for cre-
ating secondary motion effects such as flesh jiggling
when a character is moving (Turner and Thalmann,
1993; Lee et al., 2009; Gilles et al., 2011; Saito
et al., 2015). Turner and Thalmann model the elas-
ticity of skin for character animation and simulate the
fat layer by Hookian spring forces (Turner and Thal-
mann, 1993). However, they treat muscles as purely
controlled elements. Thus, they do not model mus-
cles with deformable methods. Wilhelms (Wilhelms,
1994) presented an approach for animated animals
by simulating individual bones, muscles, soft tissues
and skin. The use of muscles, soft tissues and flesh
elements makes it hard to fit this approach into the
skinning framework. Moreover, Hahn et al. (Hahn
et al., 2012; Hahn et al., 2013) generated secondary
skin dynamics based on the rig degrees of freedom.
Their methods simulate the deformation of a charac-
ter’s fat and muscles in the nonlinear subspace in-
duced by the character rig. In the other direction,
Kim and James (Kim and James, 2011) proposed
a domain-decomposition method to simulate artic-
ulated deformable characters entirely within a sub-
space framework, where they combined locally ro-
tated nonlinear subspace models to simulate the de-
tailed deformations of the models. In order to simu-
late the musculotendons of the human hand and fore-
arm, (Sueda et al., 2008) add anatomic detail using
the tendons and bones. While physics-based skinning
methods can automatically generate secondary mo-
tion with high visual quality, they entail a significant
computational burden that slows production and pro-
hibits its use in interactive environments. McAdams
et al. (McAdams et al., 2011) presented a robust
method using a uniform hexahedral lattice, which
provides convincing deformations of the skin with
contact handling. In addition, they introduce a one-
point quadrature scheme and a multi-grid solver in
order to improve the performance and stabilize the
simulation. Although their method can capture ap-
pealing skin deformations and guarantee pinch-free
geometry, it works at best at near interactive perfor-
mance (as we can see in Fig. 5). Recently, Deul and
Bender (Bender et al., 2013) introduced a multi-layer
character skinning based on shape matching with ori-
ented particles, used to simulate the elastic behav-
ior of a closed triangular mesh as a representation of
a skin model. They make a use of position-based
constraints for coupling the skeleton with the skin
and handling self-collisions. In (Rumman and Fratar-
cangeli, 2014; Rumman et al., 2015; Abu Rumman
and Fratarcangeli, 2015), a two-layered approach, the
skin is first deformed with a classic linear blend skin-
ning and then the vertex positions are adjusted us-
ing Position-based Dynamics. This allows to robustly
mimic the behavior of the skin, and achieve and tune
effects like volume preservation and jiggling at inter-
State of the Art in Skinning Techniques for Articulated Deformable Characters
207

Figure 5: The Method of (McAdams et al., 2011) takes a skeleton and a surface mesh as input. Based on a hexahedral
lattice with 106,567 cells (center), their method simulates the deformed surface (right) obeying self-collision and volumetric
elasticity at 5.5 seconds per frame. (Image taken from (McAdams et al., 2011)).
active rate. Lastly, Gao et al. (Gao et al., 2014) pro-
posed a physics-based skinning method for skeleton-
based characters. They introduced a material model
of ex-rotated elasticity, which uses a procedural skin-
ning technique to approximate co-rotated elasticity
with an affine force model and pose-dependent coeffi-
cients. Their method can simulate high-resolution hu-
man flesh models with full external and self-collision
processing, without the ability to generate secondary
motions effects like jiggling of the fat tissues.
5 CONCLUSION
In this paper, we have reviewed the common tech-
niques for modelling deformations, especially those
for character animation purposes. A greater atten-
tion was paid to skeleton-based methods, and physics-
based methods. In skeleton-based skinning such as
linear blend skinning, dual quaternion skinning and
pose space deformation, surface deformation is re-
stricted to the skeletal pose that fully defines the sur-
face deformation. While skeleton-based methods can
produce good results, the believability of the deforma-
tion using these methods is limited. Because they can-
not capture secondary motions effects and skin con-
tact deformations. Skeleton-based deformation alone
is not sufficient for capturing believable skin defor-
mations, such as skin stretching, secondary motion
effects and skin contact due to collisions. In contrast,
physics-based simulations bring skeleton-based ani-
mation beyond the purely kinematic approach by sim-
ulating secondary motions such as jiggling of soft tis-
sues when the character is moving, as well as captur-
ing skin contact deformation. Simulating such flesh-
like deformations is difficult due to the coupling be-
tween the skeleton and soft skin. Moreover, the re-
sultant deformation has a high number of indepen-
dent degrees of freedom, in which it does not respect
any manipulation done by the artist. Therefore, once
the deformation parameters are specified, it is diffi-
cult to control the actual resulting shape of the char-
acter in every animation frame. Furthermore, physics-
based methods are computationally expensive and
usually avoided in interactive applications. In the fu-
ture skinning research, the computational process for
obtaining believable skin motion must trade-off be-
tween these requirements: it must (1) be fast enough
to achieve interactive rate (i.e., >30 fps), (2) pro-
duce believable animation to minimize manual post-
processing time, and (3) be controllable and stable.
REFERENCES
Abu Rumman, N. and Fratarcangeli, M. (2015). Position-
based skinning for soft articulated characters. Com-
puter Graphics Forum, 34(6):240–250.
Alexa, M. (2002). Linear combination of transformations.
In Proceedings of the 29th Annual Conference on
Computer Graphics and Interactive Techniques, SIG-
GRAPH ’02, pages 380–387, New York, NY, USA.
ACM.
Allen, B., Curless, B., and Popovi
´
c, Z. (2002). Articu-
lated body deformation from range scan data. In Pro-
ceedings of the 29th Annual Conference on Computer
Graphics and Interactive Techniques, SIGGRAPH
’02, pages 612–619, New York, NY, USA. ACM.
Angelidis, A. and Singh, K. (2007). Kinodynamic skin-
ning using volume-preserving deformations. In Pro-
ceedings of the 2007 ACM SIGGRAPH/Eurographics
Symposium on Computer Animation, SCA 2007, San
Diego, California, USA, August 2-4, 2007, pages 129–
140.
Baran, I. and Popovi
´
c, J. (2007). Automatic rigging and
animation of 3d characters. In ACM SIGGRAPH 2007
Papers, SIGGRAPH ’07, New York, NY, USA. ACM.
Bender, J., M
¨
uller, M., Otaduy, M. A., and Teschner, M.
(2013). Position-based methods for the simulation of
solid objects in computer graphics. In EUROGRAPH-
ICS 2013 State of the Art Reports. Eurographics As-
sociation.
Bharaj, G., Thorm
¨
ahlen, T., Seidel, H.-P., and Theobalt, C.
(2012). Automatically rigging multi-component char-
acters. Comp. Graph. Forum, 31(2pt3):755–764.
GRAPP 2016 - International Conference on Computer Graphics Theory and Applications
208

Bloor, M. I. G. and Wilson, M. J. (1990). Using partial
differential equations to generate free-form surfaces:
91787. Comput. Aided Des., 22(4):202–212.
Botsch, M. and Kobbelt, L. (2003). Multiresolution surface
representation based on displacement volumes. Com-
puter Graphics Forum, 22(3):483–491.
Bro-nielsen, M. and Cotin, S. (1996). Real-time volumetric
deformable models for surgery simulation using finite
elements and condensation. In Computer Graphics
Forum, pages 57–66.
Capell, S., Burkhart, M., Curless, B., Duchamp, T., and
Popovi
´
c, Z. (2005). Physically based rigging for de-
formable characters. In Proceedings of the 2005 ACM
SIGGRAPH/Eurographics Symposium on Computer
Animation, SCA ’05, pages 301–310, New York, NY,
USA. ACM.
Capell, S., Green, S., Curless, B., Duchamp, T., and
Popovi
´
c, Z. (2002). Interactive skeleton-driven dy-
namic deformations. In Proceedings of the 29th An-
nual Conference on Computer Graphics and Inter-
active Techniques, SIGGRAPH ’02, pages 586–593,
New York, NY, USA. ACM.
Chadwick, J. E., Haumann, D. R., and Parent, R. E. (1989).
Layered construction for deformable animated char-
acters. SIGGRAPH Comput. Graph., 23(3):243–252.
Chen, C.-H., Lin, I.-C., Tsai, M.-H., and Lu, P.-H. (2011).
Lattice-based skinning and deformation for real-time
skeleton-driven animation. In Proceedings of the 2011
12th International Conference on Computer-Aided
Design and Computer Graphics, CADGRAPHICS
’11, pages 306–312, Washington, DC, USA. IEEE
Computer Society.
Coquillart, S. (1990). Extended free-form deformation: A
sculpturing tool for 3d geometric modeling. In Pro-
ceedings of the 17th Annual Conference on Computer
Graphics and Interactive Techniques, SIGGRAPH
’90, pages 187–196, New York, NY, USA. ACM.
Desbrun, M. and Gascuel, M.-P. (1995). Animating soft
substances with implicit surfaces. In Proceedings of
the 22Nd Annual Conference on Computer Graphics
and Interactive Techniques, SIGGRAPH ’95, pages
287–290, New York, NY, USA. ACM.
Dionne, O. and de Lasa, M. (2013). Geodesic voxel binding
for production character meshes. In Proceedings of
the 12th ACM SIGGRAPH/Eurographics Symposium
on Computer Animation, SCA ’13, pages 173–180,
New York, NY, USA. ACM.
Feng, W.-W., Kim, B.-U., and Yu, Y. (2008). Real-time
data driven deformation using kernel canonical cor-
relation analysis. In ACM SIGGRAPH 2008 Papers,
SIGGRAPH ’08, pages 91:1–91:9, New York, NY,
USA. ACM.
Forstmann, S. and Ohya, J. (2006). Fast skeletal animation
by skinned arc-spline based deformation. EG 2006
Short Papers, pages 1–4.
Forstmann, S., Ohya, J., Krohn-Grimberghe, A., and Mc-
Dougall, R. (2007). Deformation styles for spline-
based skeletal animation. In Proceedings of the 2007
ACM SIGGRAPH/Eurographics Symposium on Com-
puter Animation, SCA ’07, pages 141–150, Aire-la-
Ville, Switzerland, Switzerland. Eurographics Asso-
ciation.
Galoppo, N., Otaduy, M. A., Tekin, S., Gross, M. H., and
Lin, M. C. (2007). Soft articulated characters with fast
contact handling. Comput. Graph. Forum, 26(3):243–
253.
Gao, M., Mitchell, N., and Sifakis, E. (2014). Steklov-
poincar
´
e skinning. In The Eurographics / ACM SIG-
GRAPH Symposium on Computer Animation, SCA
’14, Copenhagen, Denmark, 2014., pages 139–148.
Gilles, B., Bousquet, G., Faure, F., and Pai, D. K. (2011).
Frame-based elastic models. ACM Trans. Graph.,
30(2):15:1–15:12.
Girard, M. and Maciejewski, A. A. (1985). Computa-
tional modeling for the computer animation of legged
figures. In Proceedings of the 12th Annual Con-
ference on Computer Graphics and Interactive Tech-
niques, SIGGRAPH ’85, pages 263–270, New York,
NY, USA. ACM.
Goktekin, T. G., Reisch, J., Peachey, D., and Shah, A.
(2007). An effects recipe for rolling a dough, crack-
ing an egg and pouring a sauce. In ACM SIGGRAPH
2007 Sketches, SIGGRAPH ’07, New York, NY, USA.
ACM.
Gourret, J.-P., Thalmann, N. M., and Thalmann, D. (1989).
Simulation of object and human skin formations in a
grasping task. In Proceedings of the 16th Annual Con-
ference on Computer Graphics and Interactive Tech-
niques, SIGGRAPH ’89, pages 21–30, New York, NY,
USA. ACM.
Guskov, I., Sweldens, W., and Schr
¨
oder, P. (1999). Mul-
tiresolution signal processing for meshes. In Pro-
ceedings of the 26th Annual Conference on Computer
Graphics and Interactive Techniques, SIGGRAPH
’99, pages 325–334, New York, NY, USA. ACM
Press/Addison-Wesley Publishing Co.
Hahn, F., Martin, S., Thomaszewski, B., Sumner, R., Coros,
S., and Gross, M. (2012). Rig-space physics. ACM
Trans. Graph., 31(4):72:1–72:8.
Hahn, F., Thomaszewski, B., Coros, S., Sumner, R., and
Gross, M. (2013). Efficient simulation of secondary
motion in rig-space. In Proceedings of the ACM SIG-
GRAPH/Eurographics Symposium on Computer Ani-
mation, SCA ’13.
Hejl, J. (2004). Hardware skinning with quaternions.
In Kirmse, A., editor, Game Programming Gems 4,
pages 487–495. Charles River Media.
Hong, M., Jung, S., Choi, M.-H., and Welch, S. (2006). Fast
volume preservation for a mass-spring system. Com-
puter Graphics and Applications, IEEE, 26(5):83–91.
Huang, J., Shi, X., Liu, X., Zhou, K., Wei, L.-Y., Teng,
S.-H., Bao, H., Guo, B., and Shum, H.-Y. (2006).
Subspace gradient domain mesh deformation. ACM
Trans. Graph., 25(3):1126–1134.
Jacka, D., Reid, A., Merry, B., and Gain, J. (2007). A com-
parison of linear skinning techniques for character an-
imation. In Proceedings of the 5th International Con-
ference on Computer Graphics, Virtual Reality, Visu-
alisation and Interaction in Africa, AFRIGRAPH ’07,
pages 177–186, New York, NY, USA. ACM.
State of the Art in Skinning Techniques for Articulated Deformable Characters
209

Jacobson, A., Baran, I., Kavan, L., Popovi
´
c, J., and Sorkine,
O. (2012). Fast automatic skinning transformations.
ACM Trans. Graph., 31(4):77:1–77:10.
Jacobson, A., Baran, I., Popovi
´
c, J., and Sorkine, O. (2011).
Bounded biharmonic weights for real-time deforma-
tion. ACM Trans. Graph., 30(4):78:1–78:8.
Jacobson, A., Deng, Z., Kavan, L., and Lewis, J. (2014).
Skinning: Real-time shape deformation. In ACM SIG-
GRAPH 2014 Courses.
Jacobson, A. and Sorkine, O. (2011). Stretchable and
twistable bones for skeletal shape deformation. In
Proceedings of the 2011 SIGGRAPH Asia Confer-
ence, SA ’11, pages 165:1–165:8, New York, NY,
USA. ACM.
Jain, S. and Liu, C. K. (2011). Controlling physics-based
characters using soft contacts. ACM Trans. Graph.
(SIGGRAPH Asia), 30:163:1–163:10.
Joshi, P., Meyer, M., DeRose, T., Green, B., and Sanocki,
T. (2007). Harmonic coordinates for character articu-
lation. ACM Trans. Graph., 26(3).
Ju, T., Schaefer, S., and Warren, J. (2005). Mean value
coordinates for closed triangular meshes. ACM Trans.
Graph., 24(3):561–566.
Ju, T., Zhou, Q.-Y., van de Panne, M., Cohen-Or, D., and
Neumann, U. (2008). Reusable skinning templates
using cage-based deformations. ACM Trans. Graph.,
27(5):122:1–122:10.
Kavan, L., Collins, S., and O’Sullivan, C. (2009). Auto-
matic linearization of nonlinear skinning. In Proceed-
ings of the 2009 Symposium on Interactive 3D Graph-
ics and Games, I3D ’09, pages 49–56, New York, NY,
USA. ACM.
Kavan, L., Collins, S., Z
´
ara, J., and O’Sullivan, C. (2007).
Skinning with dual quaternions. In Proceedings of
the 2007 Symposium on Interactive 3D Graphics and
Games, I3D ’07, pages 39–46, New York, NY, USA.
ACM.
Kavan, L. and Sorkine, O. (2012). Elasticity-inspired
deformers for character articulation. ACM Trans.
Graph., 31(6):196:1–196:8.
Kavan, L. and Z
´
ara, J. (2005). Spherical blend skinning:
A real-time deformation of articulated models. In
Proceedings of the 2005 Symposium on Interactive
3D Graphics and Games, I3D ’05, pages 9–16, New
York, NY, USA. ACM.
Kim, J. and Pollard, N. S. (2011). Fast simulation of
skeleton-driven deformable body characters. ACM
Trans. Graph., 30(5):121:1–121:19.
Kim, T. and James, D. L. (2011). Physics-based char-
acter skinning using multi-domain subspace defor-
mations. In Proceedings of the 2011 ACM SIG-
GRAPH/Eurographics Symposium on Computer Ani-
mation, SCA ’11, pages 63–72, New York, NY, USA.
ACM.
Kim, Y. and Han, J. (2014). Bulging-free dual quaternion
skinning. Journal of Visualization and Computer An-
imation, 25(3-4):323–331.
Kry, P. G., James, D. L., and Pai, D. K. (2002). Eigen-
skin: Real time large deformation character skinning
in hardware. In Proceedings of the 2002 ACM SIG-
GRAPH/Eurographics Symposium on Computer An-
imation, SCA ’02, pages 153–159, New York, NY,
USA. ACM.
Kurihara, T. and Miyata, N. (2004). Modeling deformable
human hands from medical images. In Proceedings of
the 2004 ACM SIGGRAPH/Eurographics Symposium
on Computer Animation, SCA ’04, pages 355–363,
Aire-la-Ville, Switzerland, Switzerland. Eurographics
Association.
Larboulette, C., Cani, M.-P., and Arnaldi, B. (2005). Dy-
namic skinning: adding real-time dynamic effects to
an existing character animation. In SCCG, pages 87–
93.
Lasseter, J. (1987). Principles of traditional animation ap-
plied to 3d computer animation. SIGGRAPH Comput.
Graph., 21(4):35–44.
Le, B. H. and Deng, Z. (2012). Smooth skinning de-
composition with rigid bones. ACM Trans. Graph.,
31(6):199:1–199:10.
Le, B. H. and Deng, Z. (2014). Robust and accurate skeletal
rigging from mesh sequences. ACM Trans. Graph.,
33(4):84:1–84:10.
Lee, G. S., Lin, A., Schiller, M., Peters, S., McLaughlin,
M., and Hanner, F. (2013). Enhanced dual quater-
nion skinning for production use. In ACM SIGGRAPH
2013 Talks, SIGGRAPH ’13, pages 9:1–9:1, New
York, NY, USA. ACM.
Lee, S.-H., Sifakis, E., and Terzopoulos, D. (2009). Com-
prehensive biomechanical modeling and simulation of
the upper body. ACM Trans. Graph., 28(4):99:1–
99:17.
Lee, Y., Terzopoulos, D., and Waters, K. (1995). Realis-
tic modeling for facial animation. In Proceedings of
the 22Nd Annual Conference on Computer Graphics
and Interactive Techniques, SIGGRAPH ’95, pages
55–62, New York, NY, USA. ACM.
Lewis, J. P., Cordner, M., and Fong, N. (2000). Pose space
deformation: A unified approach to shape interpola-
tion and skeleton-driven deformation. In Proceedings
of the 27th Annual Conference on Computer Graphics
and Interactive Techniques, SIGGRAPH ’00, pages
165–172, New York, NY, USA. ACM Press/Addison-
Wesley Publishing Co.
Lipman, Y., Cohen-Or, D., Gal, R., and Levin, D. (2007a).
Volume and shape preservation via moving frame ma-
nipulation. ACM Trans. Graph., 26(1).
Lipman, Y., Kopf, J., Cohen-Or, D., and Levin, D.
(2007b). Gpu-assisted positive mean value coordi-
nates for mesh deformations. In Proceedings of the
Fifth Eurographics Symposium on Geometry Process-
ing, SGP ’07, pages 117–123, Aire-la-Ville, Switzer-
land, Switzerland. Eurographics Association.
Liu, L., Yin, K., Wang, B., and Guo, B. (2013). Simula-
tion and control of skeleton-driven soft body charac-
ters. ACM Trans. Graph., 32(6):215:1–215:8.
Magnenat-Thalmann, N., Laperri
`
ere, R., and Thalmann, D.
(1988). Joint-dependent local deformations for hand
animation and object grasping. In Proceedings on
GRAPP 2016 - International Conference on Computer Graphics Theory and Applications
210

Graphics Interface ’88, pages 26–33, Toronto, Ont.,
Canada. Canadian Information Processing Society.
McAdams, A., Zhu, Y., Selle, A., Empey, M., Tamstorf, R.,
Teran, J., and Sifakis, E. (2011). Efficient elasticity for
character skinning with contact and collisions. ACM
Trans. Graph., 30(4):37:1–37:12.
Merry, B., Marais, P., and Gain, J. (2006). Animation
space: A truly linear framework for character anima-
tion. ACM Trans. Graph., 25(4):1400–1423.
Milliron, T., Jensen, R. J., Barzel, R., and Finkelstein, A.
(2002). A framework for geometric warps and defor-
mations. ACM Trans. Graph., 21(1):20–51.
Min, K.-H., Baek, S.-M., Lee, G. A., Choi, H., and Park,
C.-M. (2000). Anatomically-based modeling and an-
imation of human upper limbs. In Proceedings of In-
ternational Conference on Human Modeling and Ani-
mation.
Mohr, A. and Gleicher, M. (2003). Building efficient, ac-
curate character skins from examples. In ACM SIG-
GRAPH 2003 Papers, SIGGRAPH ’03, pages 562–
568, New York, NY, USA. ACM.
Moore, P. and Molloy, D. (2007). A survey of computer-
based deformable models. In Machine Vision and Im-
age Processing Conference, 2007. IMVIP 2007. Inter-
national, pages 55–66.
M
¨
uller, M., Dorsey, J., McMillan, L., Jagnow, R., and Cut-
ler, B. (2002). Stable real-time deformations. In Pro-
ceedings of the 2002 ACM SIGGRAPH/Eurographics
Symposium on Computer Animation, pages 49–54,
New York, NY, USA. ACM.
Nealen, A., Mueller, M., Keiser, R., Boxerman, E., and
Carlson, M. (2006). Physically Based Deformable
Models in Computer Graphics. Computer Graphics
Forum, 25(4):809–836.
Nieto, J. and Susin, A. (2013). Cage based deformations:
A survey. In Deformation Models, volume 7 of Lec-
ture Notes in Computational Vision and Biomechan-
ics, pages 75–99. Springer Netherlands.
Park, S. I. and Hodgins, J. K. (2006). Capturing and animat-
ing skin deformation in human motion. In ACM SIG-
GRAPH 2006 Papers, SIGGRAPH ’06, pages 881–
889, New York, NY, USA. ACM.
Park, S. I. and Hodgins, J. K. (2008). Data-driven modeling
of skin and muscle deformation. In ACM SIGGRAPH
2008 Papers, SIGGRAPH ’08, pages 96:1–96:6, New
York, NY, USA. ACM.
Popovi
´
c, J., Seitz, S. M., and Erdmann, M. (2003). Motion
sketching for control of rigid-body simulations. ACM
Trans. Graph., 22(4):1034–1054.
Rhee, T., Lewis, J. P., and Neumann, U. (2006). Real-time
weighted pose-space deformation on the GPU. Com-
put. Graph. Forum, 25(3):439–448.
Rohmer, D., Hahmann, S., and Cani, M. (2008). Local
volume preservation for skinned characters. Comput.
Graph. Forum, 27(7):1919–1927.
Rohmer, D., Hahmann, S., and Cani, M.-P. (2009). Ex-
act volume preserving skinning with shape con-
trol. In Proceedings of the 2009 ACM SIG-
GRAPH/Eurographics Symposium on Computer Ani-
mation, SCA ’09, pages 83–92, New York, NY, USA.
ACM.
Rumman, N. A. and Fratarcangeli, M. (2014). Position
based skinning of skeleton-driven deformable charac-
ters. In Proceedings of the 30th Spring Conference on
Computer Graphics, SCCG ’14, pages 83–90, New
York, NY, USA. ACM.
Rumman, N. A., Schaerf, M., and Bechmann, D. (2015).
Collision detection for articulated deformable charac-
ters. In Proceedings of the 8th ACM SIGGRAPH Con-
ference on Motion in Games, MIG ’15, pages 215–
220, New York, NY, USA. ACM.
Saito, S., Zhou, Z.-Y., and Kavan, L. (2015). Computational
bodybuilding: Anatomically-based modeling of hu-
man bodies. ACM Trans. Graph., 34(4):41:1–41:12.
Savoye, Y. and Franco, J.-S. (2010). Cageik: Dual-laplacian
cage-based inverse kinematics. In Proceedings of the
6th International Conference on Articulated Motion
and Deformable Objects, AMDO’10, pages 280–289,
Berlin, Heidelberg. Springer-Verlag.
Schumacher, C., Thomaszewski, B., Coros, S., Martin, S.,
Sumner, R., and Gross, M. (2012). Efficient simula-
tion of example-based materials. In Proceedings of the
ACM SIGGRAPH/Eurographics Symposium on Com-
puter Animation, SCA ’12, pages 1–8, Aire-la-Ville,
Switzerland, Switzerland. Eurographics Association.
Sederberg, T. W. and Parry, S. R. (1986). Free-form defor-
mation of solid geometric models. In Proceedings of
the 13th Annual Conference on Computer Graphics
and Interactive Techniques, SIGGRAPH ’86, pages
151–160, New York, NY, USA. ACM.
Shi, X., Zhou, K., Tong, Y., Desbrun, M., Bao, H., and Guo,
B. (2008). Example-based dynamic skinning in real
time. ACM Trans. Graph., 27(3):29:1–29:8.
Shinar, T., Schroeder, C., and Fedkiw, R. (2008). Two-
way coupling of rigid and deformable bodies. In Pro-
ceedings of the 2008 ACM SIGGRAPH/Eurographics
Symposium on Computer Animation, SCA ’08, pages
95–103, Aire-la-Ville, Switzerland, Switzerland. Eu-
rographics Association.
Sloan, P.-P. J., Rose, III, C. F., and Cohen, M. F. (2001).
Shape by example. In Proceedings of the 2001 Sym-
posium on Interactive 3D Graphics, I3D ’01, pages
135–143, New York, NY, USA. ACM.
Sueda, S., Kaufman, A., and Pai, D. K. (2008). Musculo-
tendon simulation for hand animation. ACM Trans.
Graph., 27(3):83:1–83:8.
Terzopoulos, D., Platt, J., Barr, A., and Fleischer, K. (1987).
Elastically deformable models. SIGGRAPH Comput.
Graph., 21(4):205–214.
Turner, R. and Thalmann, D. (1993). The elastic sur-
face layer model for animated character construction.
In PROCEEDINGS OF COMPUTER GRAPHICS IN-
TERNATIONAL ’93, pages 399–412. SpringerVerlag.
Vaillant, R., Barthe, L., Guennebaud, G., Cani, M.-P.,
Rohmer, D., Wyvill, B., Gourmel, O., and Paulin,
M. (2013). Implicit skinning: Real-time skin defor-
mation with contact modeling. ACM Trans. Graph.,
32(4):125:1–125:12.
State of the Art in Skinning Techniques for Articulated Deformable Characters
211

Vaillant, R., Guennebaud, G., Barthe, L., Wyvill, B., and
Cani, M.-P. (2014). Robust iso-surface tracking for
interactive character skinning. ACM Trans. Graph.,
33(6):189:1–189:11.
von Funck, W., Theisel, H., and Seidel, H. (2008). Volume-
preserving mesh skinning. In Proceedings of the Vi-
sion, Modeling, and Visualization Conference 2008,
VMV 2008, Konstanz, Germany, October 8-10, 2008,
pages 409–414.
von Funck, W., Theisel, H., and Seidel, H.-P. (2006). Vector
field based shape deformations. ACM Trans. Graph.,
25(3):1118–1125.
Wang, R. Y., Pulli, K., and Popovi
´
c, J. (2007). Real-time
enveloping with rotational regression. ACM Trans.
Graph., 26(3).
Wang, X. C. and Phillips, C. (2002). Multi-weight envelop-
ing: Least-squares approximation techniques for skin
animation. In Proceedings of the 2002 ACM SIG-
GRAPH/Eurographics Symposium on Computer An-
imation, SCA ’02, pages 129–138, New York, NY,
USA. ACM.
Wilhelms, J. (1994). Modeling animals with bones, mus-
cles, and skin. Technical report, University of Califor-
nia.
Yang, X., Somasekharan, A., and Zhang, J. J. (2006).
Curve skeleton skinning for human and creature char-
acters. Computer Animation and Virtual Worlds, 17(3-
4):281–292.
Zhou, K., Huang, J., Snyder, J., Liu, X., Bao, H., Guo,
B., and Shum, H.-Y. (2005). Large mesh deformation
using the volumetric graph laplacian. In ACM SIG-
GRAPH 2005 Papers, SIGGRAPH ’05, pages 496–
503, New York, NY, USA. ACM.
GRAPP 2016 - International Conference on Computer Graphics Theory and Applications
212
