
Abnormal Event Detection using Scene Partitioning by Regional Activity
Pattern Analysis
Jongmin Yu, Jeonghwan Gwak, Seongjong Noh and Moongu Jeon
School of Information and Communication, Gwangju Institute of Science and Technology,
61005 Gwangju, Republic of Korea
Keywords:
Abnormal Event Detection, Scene Partitioning, Spatio-temporal Feature, Optical Flow.
Abstract:
This paper presents a method for detecting abnormal events based on scene partitioning. To develop the
practical application for abnormal event detection, the proposed method focuses on handling various activity
patterns caused by diverse moving objects and geometric conditions such as camera angles and distances
between the camera and objects. We divide a frame into several blocks and group the blocks with similar
motion patterns. Then, the proposed method constructs normal-activity models for local regions by using the
grouped blocks. These regional models allow to detect unusual activities in complex surveillance scenes by
considering specific regional local activity patterns. We construct a new dataset called GIST Youtube dataset,
using the Youtube videos to evaluate performance in practical scenes. In the experiments, we used the dataset
of the university of minnesota, and our dataset. From the experimental study, we verified that the proposed
method is efficient in the complex scenes which contain the various activity patterns.
1 INTRODUCTION
In recent years, to develop practical surveillance sys-
tems, researchers have investigated several challeng-
ing issues such as the detection of abandoned lug-
gage (Tian et al., 2011) (Bayona et al., 2009) (Pan
et al., 2011), the person tracking (Krumm et al., 2000)
(Javed and Shah, 2002) (Sato and Aggarwal, 2001)
(Liem and Gavrila, 2014) and the unusual event de-
tection (Roshtkhari and Levine, 2013) (Cong et al.,
2011) (Mehran et al., 2009) (Zhou et al., 2015) (Li
et al., 2014). These studies have provided much help-
ful functions to the users of surveillance systems. Es-
pecially, detection of abnormal events is the one of
the important studies for surveillance systems to pro-
vide information of unusual or suspicious activities
to users. In general, abnormal events are detected
through the following procedures. Initially, activity
models for normal behaviors are constructed by learn-
ing activity patterns of objects observed in normal
videos which do not include abnormal events. Next,
the abnormality of events starts to be detected by mea-
suring similarity between input data and the learnt
models, and distinguish whether there is normal or
abnormal events by using a specific threshold.
To implement this strategy in actual surveillance
applications, we should consider two major issues.
The first is to transform individual or group activities
in the scenes into trainable patterns. The surveillance
videos contains a lot of activities that are generated
by various moving objects. Raw information such as
color or gray images is not sufficient to distinguish be-
tween normal and abnormal events. Therefore, well-
defined features for representation of these activities
are required. To transform activities into useful pat-
terns, some researchers used texture information such
as a histogram of gradient (HOG) (Dalal and Triggs,
2005), spatio-temporal gradient (Klaser et al., 2008),
and mixture of dynamic textures (Mahadevan et al.,
2010). Also, spatio-temporal frequency (Wang et al.,
2012) has been considered an efficient means of de-
tection. On the other hand, some other researchers
have focused on crowd activity modelling based on
flow information such as optical flow (Andrade et al.,
2006b) and force flow (Mehran et al., 2009).
The second is to model normal events to mea-
sure a similarity. The model of normal events is con-
structed to obtain general patterns for normal event
from frame sequences which contains only normal
events. Dictionary learning (Cong et al., 2011) and
the bag of words (BoW) model (Mehran et al., 2009)
are widely used, and probabilistic methods such as
hidden markov model (HMM) (Andrade et al., 2006a)
are also adopted.
636
Yu, J., Gwak, J., Noh, S. and Jeon, M.
Abnormal Event Detection using Scene Partitioning by Regional Activity Pattern Analysis.
DOI: 10.5220/0005720606340641
In Proceedings of the 11th Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2016) - Volume 3: VISAPP, pages 636-643
ISBN: 978-989-758-175-5
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
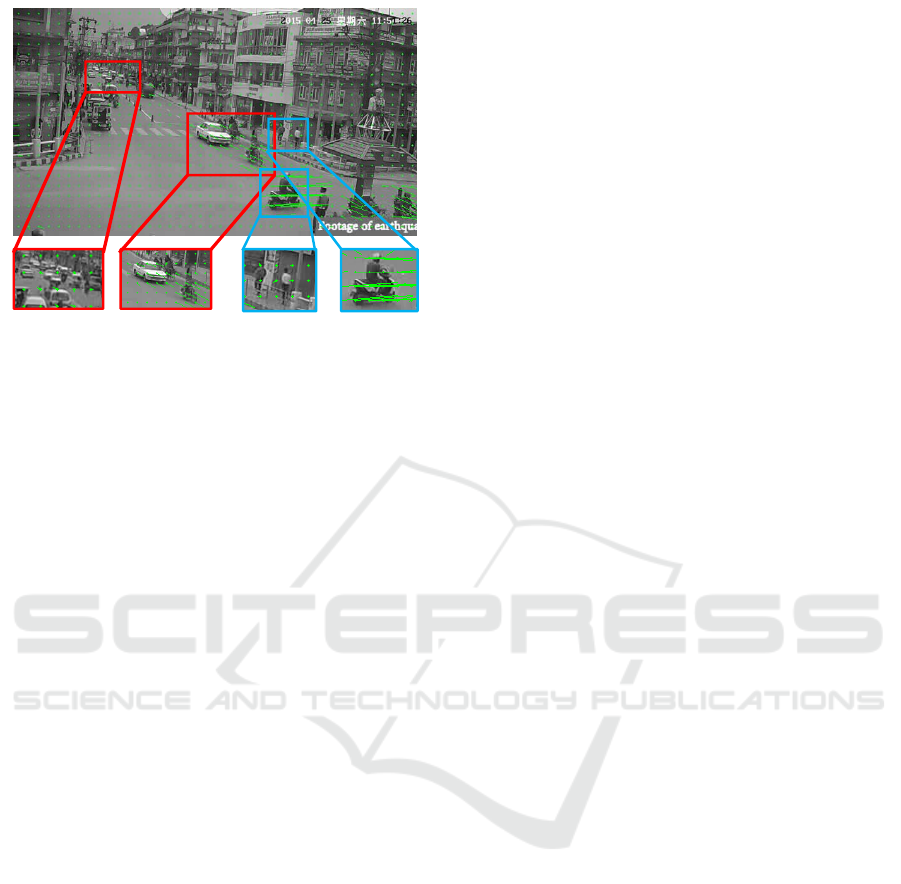
Figure 1: Right red boxes represent a distortion of flow pat-
terns caused by distance between objects and camera. Left
blue boxes show flow patterns of motorcycle and pedestri-
ans.
However, the constructed models of normal events
in the previous studies have used whole events that
are occurred within a frame without consideration of
characteristics of activities. Unfortunately, these ap-
proaches are not sufficient to capture the abnormal
event in practical situations. Videos obtained from
surveillance systems can contain a lot of diverse mov-
ing objects, and these moving objects can generate
variety activity patterns. For instance, the property of
the activity patterns in sidewalks and roads are differ-
ent. Moreover, according to the geometric conditions,
such as angle and shooting distance of a surveillance
camera, these activity patterns can be distorted. In
other words, these activity patterns can be represented
differently according to distance and angle between
the camera and objects. Figure 1 shows the diverse ac-
tivity patterns caused by various moving objects and
the geometric condition of the surveillance camera.
To handle these problems, we propose a novel
method for detection of abnormal event using scene
partitioning. We divide an image into blocks of a
uniformed size, and extract spatio-temporal volume
from the blocks. Depending on activity patterns of
each spatio-temporal volumes, we gather the blocks
with similar patterns of activities, and define a re-
gion model using the clustered blocks within a frame.
By using this region model, the proposed method can
consider more practical situations which contain di-
verse types of activity patterns. The proposed method
uses spatio-temporal volumes consisting of dense op-
tical flow (Alvarez et al., 2000). To define the regions,
entropy and magnitude of each spatio-temporal vol-
ume are used to represent activity patterns of each
block. We design a new algorithm based on an
expectation-maximization algorithm (EM algorithm)
(Moon, 1996) for grouping blocks with similar ac-
tivity patterns, and we use K-means clustering algo-
rithm to construct the bag of volume (BoV) of each
region. The main contribution of this paper is as fol-
low. in order to detect an abnormal event within com-
plex surveillance scenes, we propose anomaly detec-
tion method using local-region models which are con-
structed by scene partitioning.
The rest of the paper is organized as follows. In
Section 2, we present the previous works of research
on abnormal event detection. In Section 3, we de-
scribe the proposed method. In Section 4, the test
datasets and experimental results are shown. Finally,
the conclusion is presented in Section 4.
2 PREVIOUS WORKS
The detection method for abnormal events, as an im-
portant function in video surveillance systems, has
provoked a lot of attentions. The research on abnor-
mal event detection has made a lot of progress in re-
cent years. Abnormality of event is detected by means
of the likelihood ratio test with normal event model
of each abnormal event detection approach. Gener-
ally, events that are detected from previous works can
be classified into two types of events which is com-
posed of local abnormal events (LAE) and global ab-
normal events (GAE). LAE is the behaviors of indi-
viduals which are different from the neighbors. GAE
is defined that the group behavior of the global scene
is abnormal (Cong et al., 2011).
To detect abnormality of event from videos,
many proposed methods are focused on describing a
uniqueness of activities by measures similarity using
the general model of normal events. To describe the
uniqueness of events within a frame, a lot of method
are proposed. Detection methods for abnormality of
events in trackable situations are difficult to handle in
crowded scenes. Recently, the detection methods us-
ing tracking techniques focused on the direct use of
motion patterns in an image. (Wang and Miao, 2010)
is used Kanade-Lucas-Tomasi (KLT) feature tracker
(Lucas et al., 1981) to describe motion patterns of
moving objects. (Wang and Miao, 2010) used a his-
torical motion descriptor.
Other researches are focused on the untrackable
situations such as an extremely crowded scene. These
are focused on the modelling of group behaviors,
There are a number of methods that have been devel-
oped for GAE detection by modeling crowd activities.
(Mehran et al., 2009) represents behaviors of crowd
using the social force model (SFM) without any track-
ing method. SFM estimates the interaction force by
computing the difference between the desired veloc-
Abnormal Event Detection using Scene Partitioning by Regional Activity Pattern Analysis
637

Input frames Regional motion pattern analysis
Input frames
Divided into blocks
Activity information
extraction
Grouping
(Clustering)
Mapping into the
scene
Extract feature
(Spatio-temporal volume)
Construction the
regional BOV
Block-level
Localization
𝒕𝒉𝒓𝒆𝒔𝒉𝒐𝒍𝒅
Block-level detection
Figure 2: An overall procedure of the proposed method for abnormal event detection and localization in surveillance videos.
ity and the actual velocity. (Cui et al., 2011) models a
social behavior using the interaction energy potential.
Meanwhile, the bag of words (BoW) and dictio-
nary learning methods are commonly used to con-
struct the model of normal events. The BoW method
was changed to the bag of force (BoF) in (Mehran
et al., 2009) to incorporate interaction force. (An-
drade et al., 2006a) used the hidden markov model
(Eddy, 1996) for analysis of crowd behaviors.
Although these previous methods demonstrated
their performance in their own experiments, they
mostly focused on either LAE or GAE detection in
simple situations. Also, they construct models for
normal events using the whole events in the frames.
These approaches are inappropriate in modeling vari-
ous activity patterns which are generated from diverse
moving objects and geometrical distortion of a cam-
era. Thus, we argue that modelling of normal events
based on the local region model can help to enhance
the performance of abnormal event detection.
3 PROPOSED METHOD
In this section, we describe an abnormal event de-
tection and localization method using a scene par-
titioning based on local activity patterns. In this
paper, we focused on the abnormal event detection
of complex surveillance scenes through partitioning
the frame into several regions and modelling normal
event of each region.
Figure 2 illustrates the overall framework of the
proposed method. To partition the frame into the set
of regions, we divide frames into 3D blocks with a
uniform size, and then extract spatio-temporal fea-
tures from each block sequentially. Based on the
block-level activity information, the blocks which
have similar activity information are grouped, and
form a specific regions within a frame. Based on the
region model, the proposed method constructs mod-
els of normal activities for each region separately. By
using this models, the proposed method can detect
region-specific abnormal events.
To distinguish whether events are the abnormal
event or not, the proposed method calculates similar-
ity between the regional normal event model and the
spatio-temporal feature of blocks of each region. The
computed similarities are used to determine anomaly
of the events by comparing them with the given fixed
threshold. Since the proposed method detect the
block-level abnormal events, the method can also lo-
calize the block-level position of the abnormal event
within the frames.
3.1 Scene Partitioning based on
Regional Activity Pattern Analysis
To partition a scene using activity information, we
divide the frames into the set of 3D blocks, and we
estimate activity patterns of each block indirectly by
using the dense optical flow. In order to extract the
spatio-temporal features for obtaining training sam-
ples, given T frames which only contain the normal
events is divided into K clips. Each clip consists of
t frames. Each clip is partitioned into uniform-size
blocks of M × N × t. M × N is the size of the spa-
tial window and t is the depth of the volume in time
i.e., frames. In this paper, the temporal depth of the
block is equal to the temporal depth of the clip, where
these volumes of k-th clip C
k
can be described by
{V
k
1
,V
k
2
,V
k
3
, ...,V
k
n
}, and n is the number of 3D blocks
that are extracted from the single clip.
However, raw data of the 3D block can involve re-
dundant information. Therefore, we compute entropy
VISAPP 2016 - International Conference on Computer Vision Theory and Applications
638

and magnitude from each volume, for removing re-
dundant information and obtaining appropriate infor-
mation for activities within the volume. The entropy
can represent complexity of activity patterns, and the
magnitude provides strength of activities such as a
motion speed of the corresponding objects. To com-
pute the entropy, we calculate a histogram of optical
flow (HOF) (Chaudhry et al., 2009) of each volume.
We define the entropy of HOF from each block in k-th
clip as follow:
S
k
i
= −
B
∑
j=1
h
i,k
j
∑
B
t=1
h
i,k
t
log
∑
B
t=1
h
i,k
t
h
i,k
j
!
(1)
where S
k
i
is the entropy of i-th spatio-temporal volume
in the k-th clip, B is the number of bins of the his-
togram. h
i,k
j
denotes the number of HOF in the j −th
bin of the volume V
k
i
. The entropy of HOF is influ-
enced by the diversity of activity patterns. For exam-
ple, the entropy of scenes which is captured from a
highway intersection area is larger than the entropy of
a straight highway area. However, the entropy is in-
sufficient to estimate overall properties of activity pat-
terns. In addition, we compute the magnitude of activ-
ity patterns within the volumes to represent strength
of activities, and it is described as follows:
O
i,k
avg
=
1
H
H
∑
t=1
O
i,k
t
(2)
where O
i,k
avg
denotes the average magnitude of opti-
cal flow of the i-th volume in the k-th clip, H is the
number of optical flows in a volume, and O
i,k
t
is op-
tical flow of the t-th optical flow in the i-th volume
within the k-th clip. By using the entropy S
k
i
and the
magnitude O
i,k
avg
, we can represent the activity patterns
which is inherent in each volume, and each volume
can be defined as
V
k
i
= {S
k
i
, O
i,k
avg
} (3)
Unfortunately, the entropy and the magnitude, ex-
tracted from the single clip, are inappropriate to
model the all normal activities that are occured for a
long period. Therefore, we normalized the entropies
and the magnitudes by computing the expectation of
the entropy and the magnitude of all divided clips, and
the procedure is describe as follows:
b
S
i
=
1
L
L
∑
l=1
S
l
i
(4)
b
O
i
avg
=
1
L
L
∑
l=1
O
i,l
avg
(5)
where
b
S
i
and
b
O
i
avg
are the normalized entropy and
magnitude of activity patterns for the i-th block. L
is the number of clips. After computing the normal-
ized value for entropy and magnitude, the proposed
method partitions a scene into several regions which
consist of blocks that show similar activity patterns
using an algorithm based on the EM algorithm. The
algorithm is grouping the blocks using similarity be-
tween the entropy and magnitude of each block, the
number of centroid is not pre-determined before the
training. Fixed number of centroid may cause the
over-fitted results in scene partitioning, and thus it can
degrade the performance for detecting the abnormal
events. We propose an algorithm to increase the num-
ber of the centroids int the training phase. Algorithm
1 describes the pseudo code of the proposed algorithm
for constructing the region model.
Algorithm 1 : The algorithm for constructing the region
model based on the EM algorithm.
Input: V ←− Set of activity vector of blocks, α ←−
The fixed threshold, M ←− The number of activity
vector of the blocks.
Output: C
N
←− Centroid of the K-means al-
gorithm, N ←− The number of centroids of the
algorithm R ←− The label matrix for blocks in
frame.
C
N
is empty set at the beginning of algorithm
C
1
←− V
1
N ←− 1
R
1
←− 1
for all i ∈ M do
for all j ∈ N do
if argmin
j
(Distance(C
j
,V
i
)) < α then
Update j-th centroid C
j
using V
i
R
i
←− j
else then
Create a new centroid and region label
N ←− N + 1
C
N
←− V
i
R
i
←− N
end if
end for
end for
3.2 Regional Bag of Volumes
The process of identifying the most likely patterns for
abnormal events is one of the important issues. In
this paper, we construct regional BoVs for represent-
ing the general normal activity patterns of each re-
gion. Regional BoVs are independently modeled by
using the extracted spatio-temporal volume from the
3D block in each region. Through the regional mod-
eling, the regional BoVs can represent more detailed
information of motion activities in the regions.
Abnormal Event Detection using Scene Partitioning by Regional Activity Pattern Analysis
639

To construct the regional BoV models, we use the
K-means clustering. The centroids of the clustering
algorithm are used as the codewords. Each centroid
is initialized randomly from observed spatio-temporal
volumes extracted from each region before training.
Then, by measuring the similarity between centroids
and observed spatio-temporal volumes, centroids are
updated. When training is finished, centroids are used
to the codewords of the regional BoV. We use an Eu-
clidean distance for measuring the similarity.
In this process, the number of codewords is im-
portant. A large number of codewords can not only
increase computation cost, but also can involve redun-
dant information for normal event. On the other hand,
too small numbers of codewords can not provide suf-
ficient information to detect abnormal events. For this
reason, we determined the scale of the regional BoVs
through experimental simulations in this work.
3.3 Abnormal Event Detection and
Localization
To detect anomaly from events that are generated
from each block of each region, we measure simi-
larity between the input spatio-temporal volume and
regional BoV which is modeled from the each re-
gion that has the location information of the input
block. The proposed method used the Kullback-
Leibler (KL) divergence (Goldberger et al., 2003) to
compute the similarity. The similarity s
t
i
between the
spatio-temporal volume of i-th block in region within
t-th frame and the regional BoV of the region includ-
ing that block is describes as follow:
s
t
i
=
N
∑
j=1
D
KL
P
V
t
i
||P(M
j
)
(6)
where P (V
t
i
) is the probability distribution model
which computed from the input spatio-temporal vol-
ume of i-th block in the region within t-th frame,
and P (M
j
) is a probability distribution model of j-
th codeword of regional BoV which is specified by
the region. Then, we determine abnormality of activ-
ity pattern of each block by comparing it with fixed
threshold β. This determination process is described
as follow:
if s
i
> β then
V
i
is abnormal
else
V
i
is normal
end if.
By using this the block-level determination process,
the proposed method can specify a location which
contains the abnormal event. Moreover, by expand-
ing the determination process, the proposed method
can detect the frame-level abnormal event.
4 EXPERIMENTAL RESULT
The proposed method was tested on a public dataset
and our GIST Youtube dataset in order to demonstrate
effectiveness for abnormal event detection. In our first
experiments, we used the publicly available dataset of
the University of Minnesota. To evaluate the perfor-
mance, we also compared the results with other ab-
normal event detection approaches such as pure opti-
cal flow, social force model.
In the second experiments, used the GIST Youtube
dataset for testing in practical situations. We gath-
ered videos in realistic environment using a semantic
image crawler. The dataset is composed of 3 videos
which contain real abnormal events.
4.1 UMN Dataset
First, we evaluated our method using publicly avail-
able dataset which is released by University of Min-
nesota (called UMN dataset). The UMN dataset con-
sists of 3 different videos of crowd events. Each video
contains an escape situation in indoor and outdoor en-
vironment. Each video is composed of an initial part
of the normal events, and multiple consecutive frames
which contain abnormal events. In this experiment,
we used initial 200 frames for scene partitioning and
constructing regional BoVs.
In the stage of scene partitioning, we first compute
the dense optical flow. Next, we divide each frame
into 20 × 20 blocks, and extract 20 × 20 × 10 spatio-
temporal volume of optical flow from each block. We
found optimal threshold using cross-validation. In
conclusion, α = 0.2 and α = 0.105 are used for video
1 and 2 respectively, and α = 0.1 is used for video
3. Figure 3 illustrates results of scene partitioning
of each video in UMN dataset. In the experiments,
β = 900 is used, and the size of the regional BoVs
is 20. Table 1 provides the quantitative comparison
results. The area under ROC (AUC) of our method
is 0.9938. The values of AUC demonstrate that the
proposed method is better than the methods using
the pure optical flow and social force model (SFM)
(Mehran et al., 2009). Figure 4 shows the localization
results for abnormal event in UMN dataset. To detect
block-level abnormality, β = 0.3213 is used, and each
regional BoV contains 20 volumes.
VISAPP 2016 - International Conference on Computer Vision Theory and Applications
640

(a) (b) (c)
(a) (b) (c)
Figure 3: Results of the scene partitioning in UMN dataset.
(a), (b) and (c) are the scene partitioning results in 3 videos
of the UMN dataset.
(a)
(b)
(c)
Figure 4: Localization results of abnormal events in the
UMN dataset. Detection results in the frames are high-
lighted in red boxes. Right images are original frames. Left
images are localization results of right images.
(a) (b) (c)
Figure 5: Sample frames of the GIST YOUTUBE dataset.
(a) is ’building collapse’ scenario. (b) is frame which is
included to ’shootings’ scenario. (c) is frame of ’gas explo-
sion’ scenario.
4.2 GIST Youtube Dataset
To evaluate the performance of the proposed method
in practical scenes, we conducted experiments on the
dataset which consists of videos that are downloaded
from the Youtube. The dataset comprise of 3 videos
Table 1: Performance comparison for frame-level abnormal
event detection in the UMN dataset.
METHOD AUC
PURE OPTICAL FLOW 0.84
SFM 0.96
PROPOSED METHOD 0.9938
for abnormal events such as a building collapses,
shooting, gas explosion.
1
Figure 5 shows snapshots
of each video for the normal events. Each video in-
cludes sufficient training data to build a pattern model
of normal activities. The ’building collapse’ video
contains 805 frame, the ’shootings’ video consists of
3,099 frames, and the ’gas explosion’ video has 4,640
frames. All frames in videos was resized to the width
of 320 pixels and height of 240 pixels.
The size of the spatio-temporal volume and the
size of regional BoVs are equal to the previous exper-
iments in Section 4.1. In ‘Building collapse’ video,
α = 0.1 is used to the threshold for the scene par-
titioning, α = 0.1 is used for ‘Shooting’ video, and
α = 0.095 is used for ‘Gas explosion’ video. Figure
7 show results of scene partitioning of each video in
the GIST Youtube dataset.
The detection results are shown in Fig. 6. The
normal and abnormal results are annotated as red and
greed colors in the indicated bars. Figure 8 shows the
localization results when the proposed method detects
the abnormal events within a frame.
5 CONCLUSION
Videos obtained from a surveillance system can con-
tain a lot of diverse moving objects, and these moving
objects can represent various activity patterns. Fur-
thermore, according to the geometric conditions of
cameras, the activity patterns can be distorted. Due
to these reason, detection of abnormal event is one
of the challenging issues in computer vision research
fields.
In this paper, we proposed the novel method us-
ing scene partitioning for abnormal event detection
in complex situations. To partition a scene, we di-
vide given frames into 3D blocks, and we compute
the dense optical flow to represent activity patterns
of each block. In order to describe the characteris-
tics of activity patterns of each block and remove re-
dundant information, we computed the entropy and
magnitude of HoF of each 3D block. Finally, we
define regions through grouping blocks by measur-
ing a similarity based on the entropy and magnitude,
1
The dataset is available at http://mlv.gist.ac.kr/
mlvarch dataset/gist anomaly dataset
Abnormal Event Detection using Scene Partitioning by Regional Activity Pattern Analysis
641

#386 #805 #2438 #3099 #4460 #4640
#1800#1000#200
Figure 6: Qualitative results of the abnormal event detection for three videos of the GIST Youtube dataset.The top row
represents snapshots of video in the dataset. At the bottom, the ground truth bar and the detection result bar show the
abnormality of each frame in videos, where the green color denotes the normal frame, the red color describes the abnormal
frame, and the yellow color corresponds to frames which are use to scene partitioning and training the regional BoVs.
(a) (b) (c)
(a) (b) (c)
Figure 7: Results of the scene partitioning based on the re-
gional activity pattern analysis in GIST Youtube dataset. (a)
shows the result of scene partitioning of ’building collapse’
video. (b) denotes the result of scene partitioning for ’shoot-
ings’ video. (c) represent the scene partitioning result of
’gas explosion’ video.
(a)
(b)
(c)
Figure 8: Localization results in the GIST Youtube dataset.
Abnormal event location are highlighted in red boxes. Right
images are original frames. Left images are localization re-
sults of right images.
and model the regional BoVs independently. In this
manner, The proposed method can model the normal
events of complex situations. The experimental re-
sults showed that the proposed abnormal event detec-
tion method can detects abnormal activities success-
fully in two datasets, and demonstrate that the method
can provide an efficient way to detect the abnormal
event in practical scenes.
The current version of proposed method has two
major drawbacks. First, in order to perform scene
partitioning precisely, the proposed method requires
a sufficient number of observations for moving ob-
jects. When the moving objects are not observed,
or the number of the observed objects is not suffi-
cient, results of the scene partitioning and the normal
event modelling can degrade performance of abnor-
mal event detection. Second, the proposed method
determines thresholds manually by users. The inac-
curate setting of thresholds can be the main cause in-
correct detection for abnormal events. However, these
drawbacks are general problems appeared in most of
abnormal event detection methodologies.
To this end, our future work is to improve the re-
sult of the scene partitioning by incorporating appear-
ance information, and develop an automated method
for determining suitable threshold values.
ACKNOWLEDGEMENTS
This work was supported by Institute for Informa-
tion & communications Technology Promotion(IITP)
grant funded by the Korea government(MSIP)
(No.B0101-15-0525,Development of global multi-
target tracking and event prediction techniques based
on real-time large-scale video analysis) and Center for
Integrated Smart Sensors as Global Frontier (CISS-
2013M3A6A6073718).
VISAPP 2016 - International Conference on Computer Vision Theory and Applications
642

REFERENCES
Alvarez, L., Weickert, J., and S
´
anchez, J. (2000). Reli-
able estimation of dense optical flow fields with large
displacements. International Journal of Computer Vi-
sion, 39(1):41–56.
Andrade, E. L., Blunsden, S., and Fisher, R. B. (2006a).
Hidden markov models for optical flow analysis in
crowds. In Pattern Recognition, 2006. ICPR 2006.
18th International Conference on, volume 1, pages
460–463. IEEE.
Andrade, E. L., Blunsden, S., and Fisher, R. B. (2006b).
Modelling crowd scenes for event detection. In
Pattern Recognition, 2006. ICPR 2006. 18th Inter-
national Conference on, volume 1, pages 175–178.
IEEE.
Bayona,
´
A., SanMiguel, J. C., and Mart
´
ınez, J. M. (2009).
Comparative evaluation of stationary foreground ob-
ject detection algorithms based on background sub-
traction techniques. In Advanced Video and Signal
Based Surveillance, 2009. AVSS’09. Sixth IEEE Inter-
national Conference on, pages 25–30. IEEE.
Chaudhry, R., Ravichandran, A., Hager, G., and Vidal, R.
(2009). Histograms of oriented optical flow and binet-
cauchy kernels on nonlinear dynamical systems for
the recognition of human actions. In Computer Vision
and Pattern Recognition, 2009. CVPR 2009. IEEE
Conference on, pages 1932–1939. IEEE.
Cong, Y., Yuan, J., and Liu, J. (2011). Sparse reconstruc-
tion cost for abnormal event detection. In Computer
Vision and Pattern Recognition (CVPR), 2011 IEEE
Conference on, pages 3449–3456. IEEE.
Cui, X., Liu, Q., Gao, M., and Metaxas, D. N. (2011). Ab-
normal detection using interaction energy potentials.
In Computer Vision and Pattern Recognition (CVPR),
2011 IEEE Conference on, pages 3161–3167. IEEE.
Dalal, N. and Triggs, B. (2005). Histograms of oriented gra-
dients for human detection. In Computer Vision and
Pattern Recognition, 2005. CVPR 2005. IEEE Com-
puter Society Conference on, volume 1, pages 886–
893. IEEE.
Eddy, S. R. (1996). Hidden markov models. Current opin-
ion in structural biology, 6(3):361–365.
Goldberger, J., Gordon, S., and Greenspan, H. (2003). An
efficient image similarity measure based on approxi-
mations of kl-divergence between two gaussian mix-
tures. In Computer Vision, 2003. Proceedings. Ninth
IEEE International Conference on, pages 487–493.
IEEE.
Javed, O. and Shah, M. (2002). Tracking and object classi-
fication for automated surveillance. In Computer Vi-
sionECCV 2002, pages 343–357. Springer.
Klaser, A., Marszałek, M., and Schmid, C. (2008). A spatio-
temporal descriptor based on 3d-gradients. In BMVC
2008-19th British Machine Vision Conference, pages
275–1. British Machine Vision Association.
Krumm, J., Harris, S., Meyers, B., Brumitt, B., Hale, M.,
and Shafer, S. (2000). Multi-camera multi-person
tracking for easyliving. In Visual Surveillance, 2000.
Proceedings. Third IEEE International Workshop on,
pages 3–10. IEEE.
Li, W., Mahadevan, V., and Vasconcelos, N. (2014).
Anomaly detection and localization in crowded
scenes. Pattern Analysis and Machine Intelligence,
IEEE Transactions on, 36(1):18–32.
Liem, M. C. and Gavrila, D. M. (2014). Joint multi-
person detection and tracking from overlapping cam-
eras. Computer Vision and Image Understanding,
128:36–50.
Lucas, B. D., Kanade, T., et al. (1981). An iterative image
registration technique with an application to stereo vi-
sion. In IJCAI, volume 81, pages 674–679.
Mahadevan, V., Li, W., Bhalodia, V., and Vasconcelos, N.
(2010). Anomaly detection in crowded scenes. In
Computer Vision and Pattern Recognition (CVPR),
2010 IEEE Conference on, pages 1975–1981. IEEE.
Mehran, R., Oyama, A., and Shah, M. (2009). Abnormal
crowd behavior detection using social force model.
In Computer Vision and Pattern Recognition, 2009.
CVPR 2009. IEEE Conference on, pages 935–942.
IEEE.
Moon, T. K. (1996). The expectation-maximization algo-
rithm. Signal processing magazine, IEEE, 13(6):47–
60.
Pan, J., Fan, Q., and Pankanti, S. (2011). Robust abandoned
object detection using region-level analysis. In Im-
age Processing (ICIP), 2011 18th IEEE International
Conference on, pages 3597–3600. IEEE.
Roshtkhari, M. J. and Levine, M. D. (2013). An on-line,
real-time learning method for detecting anomalies in
videos using spatio-temporal compositions. Computer
vision and image understanding, 117(10):1436–1452.
Sato, K. and Aggarwal, J. (2001). Tracking and recognizing
two-person interactions in outdoor image sequences.
In Multi-Object Tracking, 2001. Proceedings. 2001
IEEE Workshop on, pages 87–94. IEEE.
Tian, Y., Feris, R. S., Liu, H., Hampapur, A., and Sun, M.-T.
(2011). Robust detection of abandoned and removed
objects in complex surveillance videos. Systems, Man,
and Cybernetics, Part C: Applications and Reviews,
IEEE Transactions on, 41(5):565–576.
Wang, B., Ye, M., Li, X., Zhao, F., and Ding, J.
(2012). Abnormal crowd behavior detection using
high-frequency and spatio-temporal features. Ma-
chine Vision and Applications, 23(3):501–511.
Wang, S. and Miao, Z. (2010). Anomaly detection in
crowd scene using historical information. In Intelli-
gent Signal Processing and Communication Systems
(ISPACS), 2010 International Symposium on, pages
1–4. IEEE.
Zhou, S., Shen, W., Zeng, D., and Zhang, Z. (2015). Un-
usual event detection in crowded scenes by trajectory
analysis. In Acoustics, Speech and Signal Process-
ing (ICASSP), 2015 IEEE International Conference
on, pages 1300–1304. IEEE.
Abnormal Event Detection using Scene Partitioning by Regional Activity Pattern Analysis
643
