
Infinite 3D Modelling Volumes
E. Funk and A. B
¨
orner
Department of Information Processing for Optical Systems, Institute of Optical Sensor Systems,
German Aerospace Center, Berlin, Germany
Keywords:
Large Scale automated 3D Modelling, Mobile Robotics, Efficient Data Structures, 3D Database.
Abstract:
Modern research in mobile robotics proposes to combine localization and perception in order to recognize
previously visited locations and thus to improve localization as well as the object recognition processes recur-
sively. A crucial issue is to perform updates of the scene geometry when novel observations become available.
The reason is that a practical application often requires a system to model large 3D environments at high res-
olution which exceeds the storage of the local memory. The underlying work presents an optimized volume
data structure for infinite 3D environments which facilitates i) successive world model updates without the
need to recompute the full dataset, ii) very fast in-memory data access scheme enabling the integration of high
resolution 3D sensors in real-time, iii) efficient level-of-detail for visualization and coarse geometry updates.
The technique is finally demonstrated on real world application scenarios which underpin the feasibility of the
research outcomes.
1 INTRODUCTION
Research on autonomous vehicles has become emi-
nent in recent years. A significant driving force is the
vision of autonomous transport. Cars or pillars, which
can operate autonomously 24 hours a day are highly
attractive for logistics and public or private transport
(Andreasson et al., 2015). This vision has lead to in-
tensive research that is also emphasized by the Euro-
pean Commission (EUC, 2015).
Another fruitful area of research is the automa-
tion of production sets, where robots optimized for
a single-task are carefully separated from people
(Bekris et al., 2015). The future of automation lies
in flexible factory floors and quick burst manufactur-
ing processes, which can provide complex, short-life-
cycle products without investing into reconfiguration
of the production set.
Both research disciplines have a particular aspect
in common: When it comes to simultaneous appli-
cation of multiple robots, lifelong world modelling
or accurate localization using optical 3D sensors be-
comes a critical task. Moreover, both research disci-
plines heavily rely on 3D sensors such as stereo cam-
eras or laser scanners. These are the low-level inter-
faces between the algorithmic data analysis and the
physical world. The goal is to integrate each 3D mea-
surement from the environment, whether a recognized
object, its state or its geometrical 3D shape, into a
global and consistent database. Such a database aims
at supporting all other mobile platforms in navigation
and scene understanding. Only when a mobile robot
can localize itself with respect to walls or other static
obstacles, it is able to move and to approach targeted
locations.
Common 3D sensors such as laser scanners, stereo
or time of flight cameras provide samples in R
3
of the
environment. The set of all given samples is usually
referred to as a point cloud, since no structural infor-
mation is provided by the sensors. The goal in per-
ception robotics is further to process the point clouds
to meaningful information, such as 3D maps, obsta-
cles and its positions, or any other objects of inter-
est. In fact, autonomous vehicles are able to avoid ob-
stacles, to navigate or to pick up load only when the
3D samples have successfully been processed to an
application specific model. The information process-
ing challenge is aggravated by the circumstance that
the sensors deliver large 3D point datasets. A stereo
camera, working at VGA resolution (640×480) at 10
frames per second delivers 3 million 3D points per
second. Therefore, in order to integrate all measure-
ments over multiple days or even years, a highly effi-
cient 3D database is required. Only then it is possible
to deploy a long-term operating robot capable of sur-
face extraction, or object recognition.
Today, intensive research is undertaken by the
robotics community focusing on the 3D perception.
248
Funk, E. and Börner, A.
Infinite 3D Modelling Volumes.
DOI: 10.5220/0005722002460253
In Proceedings of the 11th Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2016) - Volume 3: VISAPP, pages 248-255
ISBN: 978-989-758-175-5
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

Issues such as strong noise, huge data sets and re-
stricted computation resources make the task partic-
ularly challenging. Furthermore, 3D modelling via
stereo cameras is remarkably difficult since varia-
tions in light or object surface properties lead to non-
gaussian errors and hamper the modelling processes.
Stereo cameras for autonomous vehicles are, how-
ever, favourable since no interference between other
sensors and no a priori infrastructure in the applica-
tion domain is required. Improvements in this do-
main are expected to enable autonomous vehicles to
operate in factories and in public environments with
a strong impact on the production efficiency, traffic
safety, logistics and public transportation.
When processing 3D points from range sensor in
general, it is an accepted practice to group the 3D
samples into small cubic volumes, voxels. This en-
ables redundant data to be removed and the memory
layout to be structured efficiently since the voxel res-
olution is defined by the user a priori.
The underlying work presents a voxel-based
database approach which makes it possible to create
and to store 3D models and maps of unlimited size
and to access voxels efficiently by a given 3D coor-
dinate (x,y,z). In contrast to standard approaches,
where the modeling volume is bounded, the presented
technique enables the extension of the volume dy-
namically. This is of particular interest for all 3D
robotics applications, where the size of the environ-
ment the robot needs to operate upon is now known a
priori.
Section 2 introduces details from the state of the
art research on 3D modelling via voxels, aligned to
the proposed approach. Section 3 states the research
objectives investigated in this work. In Section 4 the
proposed methodology is presented, which clarifies
the novel data structure (Sec. 4.1) and its implication
on the voxel query speed using 3D coordinates (Sec.
4.2). Section 5 introduces the 3D modelling frame-
work. A standard approach is discussed critically with
respect to its limitations and an improved technique is
proposed. Section 6 demonstrates the application of
the voxel database and the 3D fusion technique from
range (RGBD-D) camera images. Finally, concluding
remarks and aspects for further research are given in
Section 7.
2 LITERATURE OVERVIEW
Random access of a 3D point by a given coordinate
(x,y,z) is a difficult task, since the search complex-
ity usually depends on the number of samples in the
database. Grouping the data to cubic cells on a regu-
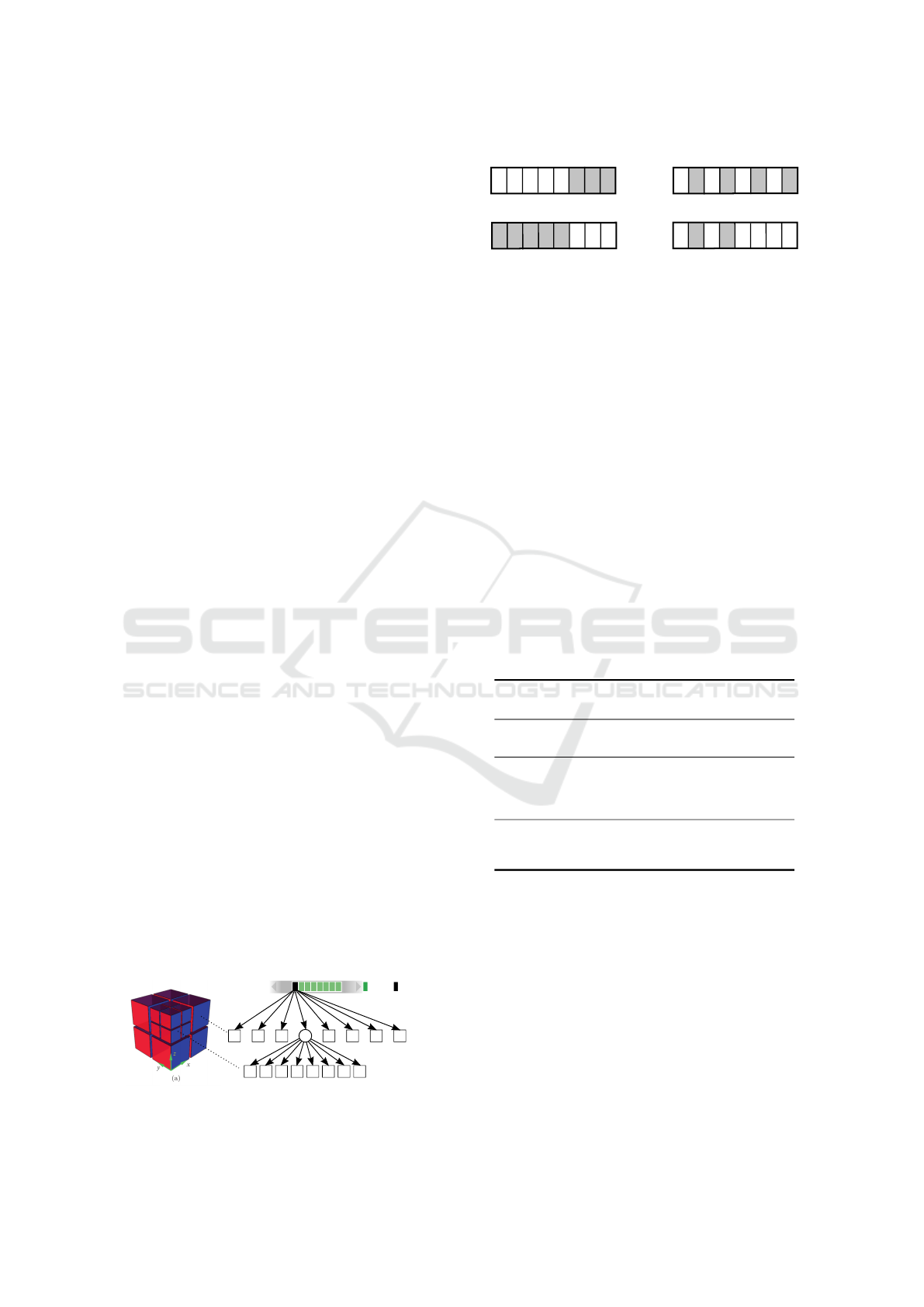
Search in 3D for: (x,y,z)
(x,y,z)
start
Figure 1: Illustrated octree structure and the data ac-
cess path (red), when searching for a voxel at coordinates
(x,y,z).
lar grid and storing them in a 3D array enables very
fast access and has been the state of the art technique
for many years. The reason is, when the resolution
r of a volume is known, e.g. r = 1cm, then the ac-
cess to the corresponding voxel coordinate x = 13m
is performed by computing its index i in the stor-
age array i = x/r = 1300. The drawback of this ap-
proach is that the memory requirements grow with
the cube of the space size. Representing a dense vol-
ume 100 × 100 × 100 m
3
at 1cm resolution, would re-
quire 3.7 TB of memory when using 32 bit data in-
side each cell. A common approach to this issue is
to structure the occupied cells with a hierarchical oc-
tree, where each node (cube) contains eight cubes of
smaller sizes ((Frisken et al., 2000), (Hornung et al.,
2013)). When searching a voxel given a coordinate
(x,y,z), the tree is traversed starting from the largest
top node, as shown in Figure 1. This means, that the
number of hierarchy levels increases the number of
path checks and thus directly affects the access speed
of a voxel. Each time an arbitrary voxel is addressed,
either when iterating or performing random access, it
is necessary to traverse the full height of the octree.
In short, the search technique in octrees suffers from
the access complexity O(d) with d being the octree-
depth.
Teschner (Teschner et al., 2003) proposed to apply
a hash-map to achieve constant time access O(1) to
sparse voxels. In principal, a coordinate (x,y,z) is en-
coded to a hash index which is used for direct data ac-
cess. Another benefit of hash based databases, is that
the amount of data can be theoretically infinite. This
further allows to store data at nearly arbitrary reso-
lution enabling huge models to be managed which is
only limited by the capacity of the physical memory.
Infinite 3D Modelling Volumes
249
However, generating unique hash values is a difficult
if not an impossible task. The goal is to avoid gener-
ating a hash value representing different coordinates
(Teschner et al., 2003).
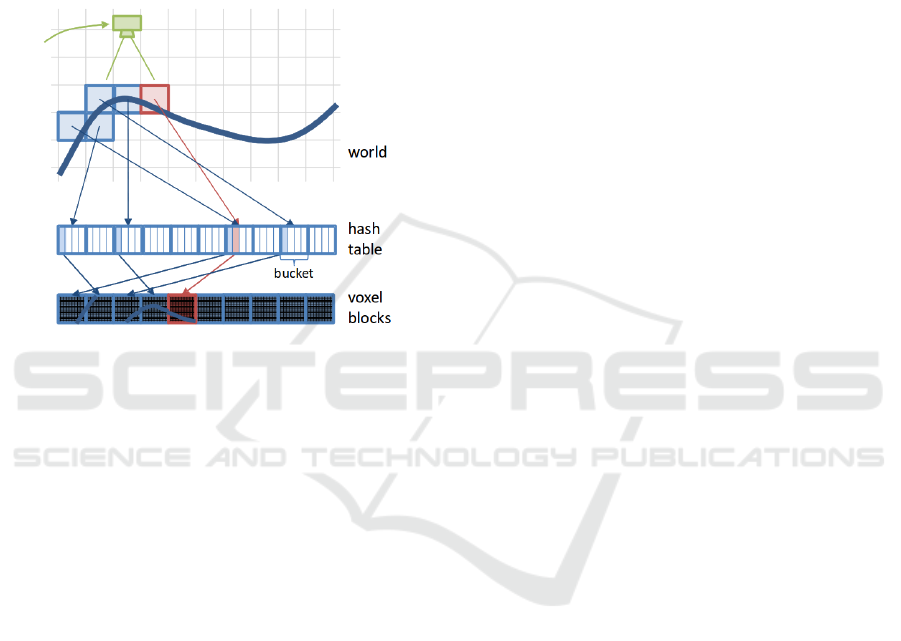
Niessner (Nießner et al., 2013) approached the
collision issue by storing also the coordinate of a
voxel and by grouping voxels with same hash values
to buckets (See Figure 2). When a voxel is found by a
hash value, which does not correspond to the searched
coordinate, the next element in the bucket is accessed.
Figure 2: Niessner (Nießner et al., 2013) applied a hash
table for voxels. Voxel coordinates leading to the same hash
key are grouped to buckets.
However, direct voxel hashing does not allow to
apply level of detail (LOD) visualization or multi
scale 3D modelling which is favourable when low
and high resolution processing is required. In fact,
LOD data structure enables to perform coarse render-
ing depending on the distance to the virtual camera
and coarse 3D modelling depending on the expected
error of a measurement (Floater and Hormann, 2005).
Practically speaking, when it is known that the covari-
ance of a 3D sample covers several meters, it is not
necessary to perform high resolution modelling on a
1cm grid.
The efficiency of the hash maps and the LOD ca-
pability of octrees motivated the development of a hy-
brid hashed octree, which is discussed next. We com-
bine the hashing technique from Teschner (Teschner
et al., 2003), approach the collision issue similarly to
Niessner but reference entire octrees by a hash index
instead of small voxels.
3 RESEARCH OBJECTIVES
The first research objective is the development of
voxel database to enable storage of geometrical mod-
els or 3D maps of unlimited size. The hash search
collision issues need to be addressed in order to guar-
antee correct voxel access given a coordinate query.
The second objective is the integration of multiple
levels of detail. Since direct voxel hashing does not
enable to query larger spatial groups of voxels, the
objective is to use the hashing technology for entire
octrees covering larger volumes. This would combine
efficient data access known from hash tables and the
favourable LOD data access scheme known from oc-
trees.
The third research objective is the development
of a 3D modelling technique applied upon the pro-
posed voxel database. Motivated by the application
in autonomous vehicles, successive 3D measurements
need to be used for successive model updates. That
means that each new point cloud from a camera frame
is expected to update an existing geometrical model.
Thus, a recursive technique is required for this task to
be accomplished in real-time. A crucial aspect is the
suppression of noise and outliers from the input data.
Section 4 presents the developed octree hashing
technique, and the hash table applied for storage and
search of hash indices. In Section 5 the proposed
voxel database is applied for successive 3D mod-
elling. In contrast to the work from (Nießner et al.,
2013), the proposed work incorporates an adaptive
noise suppression technique enabling low cost and
low power range sensors such as stereo cameras to
be applied.
4 METHODOLOGY
The hashing technique, inspired by (Teschner et al.,
2003) is extended to octrees. The fundamental part
of the technique is the storage and search of arbi-
trary data elements indices via a hash map (Google
inc., 2015). Finally, the performance of the developed
hashed octree framework is compared to a standard
octree approach and the sparse octree technique from
(Hornung et al., 2013).
4.1 Hash Indexing
We propose to combine octrees with a hash table (Fig-
ure 3) leading to sparse voxel representation. The
hash table is used to access the top level root nodes
which further contain an octree in itself. Since the
internal octrees are constructed with low depth (e.g.
d = 2), this significantly decreases the access time
compared to standard octrees. To access the voxel at
central index coordinates (x, y,z), we begin by com-
puting the rootKey
VISAPP 2016 - International Conference on Computer Vision Theory and Applications
250
int r o o t K e y [ 3 ]= { x & ˜ ((1 < < d ) - 1 ) ,
y &˜(( 1 < < d ) -1) ,
z &˜(( 1 < < d ) -1)} ;
where d is the depth of the internal octree, & and
˜ denote, respectively, bit-wise AND and NOT opera-
tions. At compile time, this reduces to just three hard-
ware AND instructions. The shift by d makes sure
that the coordinates (x,y,z) are represented by coarser
values. For instance, applying an internal octree of
depth d = 3 with 2
d
= 8 subdivision nodes in each
dimension the space is divided in coordinate ranges
{[0,7],[8,15],· · ·}. This process is illustrated in Fig-
ure 4. For example, the operation (1<<3)-1 results in
first three bits set to one. Negating the same, leads to
five one-bits and three zero bits, as shown in the illus-
tration of ˜((1<<3)-1). Similar to (Teschner et al.,
2003), the rootKey is further processed to a hash us-
ing large prime numbers.
un si gn e d i n t ro o t Ha sh = ((1 << N ) - 1)&
( r oo tK ey [0] * 73 85 6 09 3 ˆ
ro ot Ke y [ 1] * 1 9 34 9 66 3 ˆ
ro ot Ke y [ 2] * 83 49 2 79 1 );
Here, N is the constant bit-length of the hash, the
three constants are large prime numbers, ˆ is the bi-
nary XOR operator and << is the bit-wise left shift op-
erator. Since the hash is imperfect, collisions occur so
that multiple different coordinates are mapped by the
same hash. The size of the hash map N influences the
collision probability. In our experiments N was set to
32 bit leading to 70cpm (collisions per million of dis-
tinct coordinates). A drawback of the hash is that it is
not well suited for negative coordinates. Thus, when
negative values in (x,y,z) are processed to a hash, the
number of collisions increases by up to 50%. Such
high rates require countermeasures which are under-
taken by additional octree place holders (green cells
in Figure 3). Each octree reference stores also its co-
ordinate. When an octree is searched by coordinate
given by the user, the resulting octree is validated. If
the validation fails, next cell in the reference list is
checked. Finally, an octree root node enclosing the
searched coordinate is traversed to give the targeted
voxel. The linear search within a hash block slightly
reduces the performance since the hash keys are small
and fit into the Level-1 cache of the CPU.
Hash Table
Level 1
Level 2 - Voxels
#HashEntries
Empty
Allocated
Figure 3: Multiple octrees are stored independently refer-
enced by a hash.
(1<< 3)-1
0
1 1 1
0 0 0 0
~((1<< 3)-1)
1 0 0 01 1 1 1
0 1 0 10 1 0 1
x
x&~((1<< 3)-1)
0 0 0 00 1 0 1
Figure 4: Illustration of the key generation steps.
4.2 Hashed-Octree Performance
We have compared the performance of the proposed
hashed-octree with a standard octree implementation
and the recent work from (Hornung et al., 2013). The
second column in Table 1 shows the achieved random
access times for each approach. The third column
contains the best achievable resolution applying the
corresponding technique. For example, using an
octree with depth d = 16, the maximum number
of voxels is 32768
3
which corresponds to (327m)
3
when each voxel represents a box volume of 1cm
3
.
While octrees are usually limited, the hashed octree
approach is not. In theory, geometrical models of
infinite size can be represented by the proposed
technique. However, direct storage of the voxels in
the computer memory is not practical and streaming
out of core techniques (Baert et al., 2013) need to be
considered.
Table 1: Octree access time comparison.
Method Access time
Max.
resolution
Octree
(d = 16)
6.43 µs
32768
3
(327m)
3
@1cm
Octree
(Hornung
et al., 2013)
(d = 16)
2.55 µs
32768
3
(327m)
3
@1cm
Hashed-
Octree
(d = 2)
0.45 µs ∞
5 APPLICATION TO 3D
MODELLING
The final goal of the presented research work is the
application of the developed hashed octree techniques
for successive 3D modelling. When a new measure-
ment, a 3D point cloud, becomes available from the
range sensor, the goal is to update the existing 3D
model as fast as possible. Several years ago Curless
and Levoy (Curless and Levoy, 1996) proposed a vol-
umetric update approach, applying the Nadaraya Wat-
Infinite 3D Modelling Volumes
251
son regression technique (Nadaraya, 1964) for suc-
cessive volume updates from streaming range mea-
surements. In contrast to standard surface modelling
techniques with polygons, the surface is represented
by a zero level set. In principle, each voxel contains a
positive or a negative scalar value indicating its loca-
tion inside or outside of an object. Figure 5 outlines
this concept. When a surface is observed by a range
camera, the volumetric model divides the full space
into interior and exterior areas. The goal is further to
assign correct values to the voxels around the surface
in order to approximate the shape as accurate as pos-
sible.
During the reconstruction process each pixel in
the camera image is processed to a 3D point p ∈ R
3
.
The ray between the camera centre and the 3D point
is traversed updating the implicit value of each voxel
lying on the ray. In order to increase the computation
speed and to reduce the memory overhead, only vox-
els within a small distance away from p are updated.
Figure 6a shows the updated neighbouring voxels in
red and the sample p as a dark red circle. As men-
tioned before, it is assumed that voxels inside an ob-
ject receive a negative and outside-voxels a positive
scalar value. The distribution of the positive and neg-
ative values is described by a signed distance function
(SDF) in Figure 6b. The goal is finally to incorporate
the SDF into the voxel model updating existing val-
ues.
As illustrated in Figure 6b), each voxel receives a
Inside
Outside
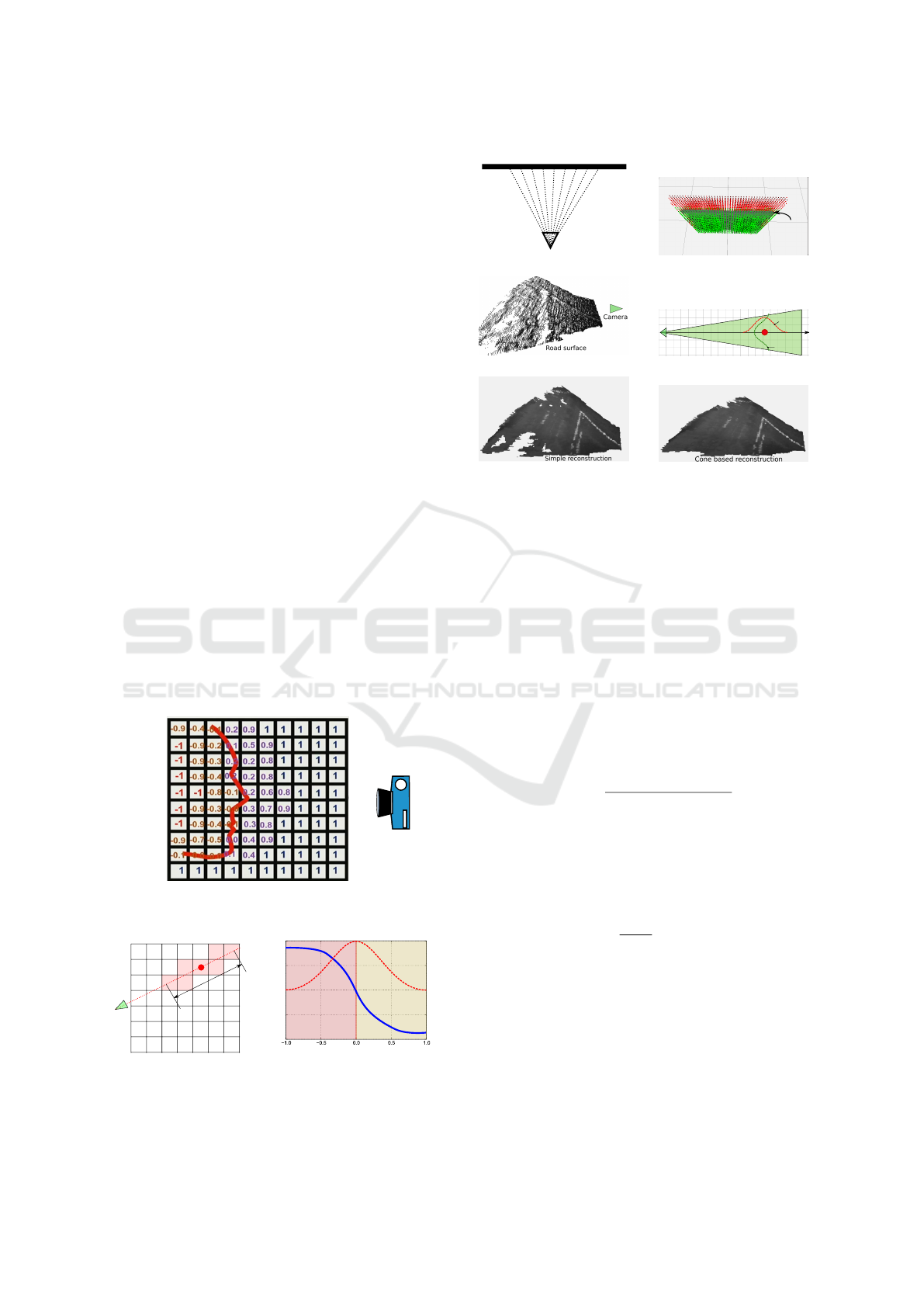
Figure 5: Implicit shape representation by the zero level set
of voxels.
Support
Camera
p
sample
SDF and Weight
Inside
Outside
SDF
Weight
r - Distance to sample p
0.0
a) b)
Figure 6: a) Range of influenced voxels from a 3D sample
p. b) The signed distance function applied and its weight
over the distance away from the sample p.
Camera
Rays to
samples
Plane/Obstacle
Positive
Negative
Reconstructed
plane
a) b)
3D Sample
w
sample
w
cone
Camera
c) d)
e) f)
Figure 7: a) Camera faces a wall in a synthetic setup, b) re-
sulting voxel values, c) point cloud from a camera observing
a road, d) the proposed cone fusion concept, e) mesh recon-
struction of the road segment with the standard Curless &
Levoy technique, f) mesh reconstruction with the proposed
cone fusion technique.
weight decreasing with the distance r away from the
sample p. This represents the certainty of the SDF
value f
i
around p. Given the SDF function values f
i
and its weight w
i
, the existing voxels along the ray and
around the sample p are updated following eq. (1).
The new state (k + 1) of the i-th voxel is computed
from its previous weight w
k
i
and its previous implicit
value f
k
i
also incorporating the novel measurements
w
i
and f
i
.
f
k+1
i
=
f
k
i
· w
k
i
+ f
i
(r) · w
i
(r)
w
k
i
+ w
i
w
k+1
i
= w
k
+ w
i
(r)
(1)
Where r is representing the distance away from p.
The weights follow the Gaussian distribution
w
i
(r) = w
sample
i
= e
−λr
(2)
where λ is set to λ =
−r
max
ln(0.1)
which gives a weight of
0.1 at the boundaries of the SDF support. Figure 7a
shows a simple synthetic scene, where a range cam-
era faces a wall. A ray is traversed through each cam-
era pixel and its intersection point with the plane is
integrated into the 3D model as a sample. After the
fusion operation (1) is applied, the voxels in front of
the plane receive positive and voxels behind the wall
receive negative values. This is shown in Figure 7b.
Because of the simplicity of this technique, it is being
applied in several 3D modelling frameworks (Nießner
VISAPP 2016 - International Conference on Computer Vision Theory and Applications
252

et al., 2013; Chajdas et al., 2014; Izadi et al., 2011).
However, this technique does not consider the sam-
ple sparsity and scale of the measurement errors. In
cases when a wall is far away from the camera, its
sample distribution is very sparse. In such a case, two
neighbouring pixels in a range camera represent sam-
ples which are far away from each other (see point
cloud in Figure 7c). This leads to holes in a volume
grid and in the reconstructed surface, which are not
recovered by the algorithm (Figure 7e). Thus, con-
sistent 3D modelling of surfaces is not possible when
the standard technique is applied.
In order to prevent this, the technique from Cur-
less and Levoy is extended to cones. The width of the
cone is small close to the camera and large when the
distance is increased (Figure 7d). Furthermore, the
weights w
i
are extended to
w
f ull
i
= w
sample
i
· w
cone
i
w
cone
i
= e
−λ
c
r
c
(3)
with r
c
as the distance of the i-th voxel orthogonal
to the ray. Similar to (2) λ
c
is set to give 0.1 at the
boundary of the cone, which is however not a critical
parameter.
This extension is the main difference of the pre-
sented 3D modelling approach compared to the state
of the art methods. Figures 7e-f show the effect of
cone fusion on 3D samples acquired from a road
surface. While the application of the standard fu-
sion technique is likely to produce holes caused by
sparse samples and noise, the presented approach still
achieves consistent surfaces.
Note, that the recursive nature of the update pro-
cess has a linear time complexity and is not affected
by the size of the 3D model. Moreover, the voxel up-
dates (1) inferred by each sample can be performed in
parallel which further increases the computation effi-
ciency of the technique.
Section 6 discusses the application of the tech-
nique on realistic datasets from a multi view high
resolution UAV-set-up and a mobile stereo system
mounted on a vehicle.
6 EXPERIMENTS
The cone based 3D fusion technique with hashed oc-
trees is demonstrated on two different applications.
In the first application a UAV with a high resolution
camera flew around a chapel. The images have been
processed by a multi view software similar to (Wu,
2011). In principle, each image is compared with all
other images and similar point features (SIFT (Lowe,
2004)) are matched. After estimating the trajectory
with a bundle block adjustment (Moulon et al., 2013)
technique, the images have been processed by a multi
view stereo matching algorithm from (Hirschmuller
and Scharstein, 2009). Finally, the obtained depth
images for each camera frame are integrated into a
global 3D model via the proposed 3D fusion tech-
nique. Figure 8 shows one of the acquired camera
images (a) and the resulting 3D model (b). The full
model consists of 167 millions of voxels, which has
been acquired from 450 image frames. The resolu-
tion of the scene was set to 0.1m. Note, that the holes
are caused by occlusions and areas which have not
been observed by the UAV camera during the flight.
These often relates to the ground under the trees, or
the ground in the backyard of the chapel occluded by
the walls.
The second application uses a stereo camera sys-
tem in combination with an inertial measurement unit
(IMU). This enables to obtain the six degrees of free-
dom (6dof) pose of the camera in real time. This set-
up is of particular interest for a wide range of indoor
applications such as inspection, autonomous transport
or logistics. More details about the hardware and
software of the real time localization system can be
found in (Baumbach and Zuev, 2014). Again, the
stereo images are processed to dense disparity images
(Hirschmuller and Scharstein, 2009). The trajectory
provided by the IMU+stereo system and the dispar-
ity images are directly used for 3D fusion. Figure 9
shows a point cloud (a) and the resulting 3D model
(b) when the cone based 3D fusion using the hashed
octree is applied.
The presented results clearly show that the devel-
oped technique is capable of handling large data sets
and to process them to simplified 3D models in linear
time depending on the number of 3D samples. It has
been observed that the multi view 3D reconstruction
point clouds suffer from less noise and errors than
the real time stereo depth images. The reason is that
when multiple images from a single object are avai-
lable, each pixel in each depth image contains multi-
ple depth hypotheses. This enables the optimization
of the depth consistency and to increase the overall
3D reconstruction quality dramatically. As for the
stereo data, the standard 3D fusion technique (Cur-
less and Levoy, 1996) lead to a high number of holes
and artefacts in the final model. Only the cone fusion
approach achieved smooth and consistent surfaces.
When the standard 3D fusion technique from
(Curless and Levoy, 1996) is applied, the algorithm
achieves a runtime performance of 500ms for a single
VGA (640 × 480) depth image on a standard desk-
top PC with 16 cores. After extending the algorithm
Infinite 3D Modelling Volumes
253
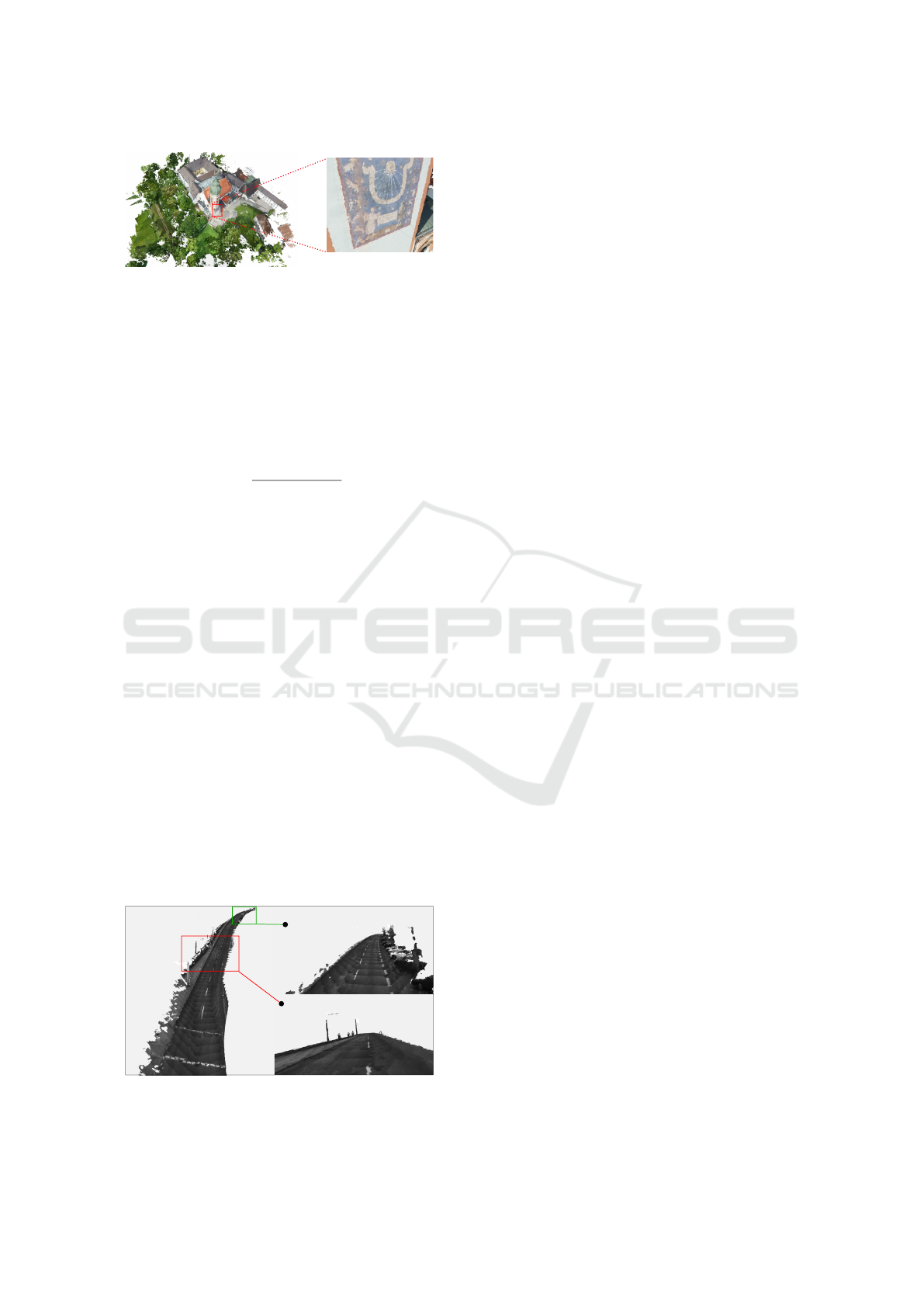
a) b)
Figure 8: a) Obtained 3D model from UAV at 1cm resolu-
tion, c) enlarged view on the chapel tower.
to the cone fusion approach, the support width of the
SDF depends on the distance between the camera and
centre and p. This increases the runtime by about
20%. The worst case run time (in seconds) for a sin-
gle frame via cone fusion can be estimated a priori
via
t
f rame
=
n
res
· p
sup
· r
2
sup
4
·t
v
(4)
with n
res
as the resolution of the image (e.g. 640 ×
480 = 307200 = n
res
), p
sup
is the width of the support
around a sample (see w
sample
Fig. 7d), and r
sup
as the
maximal width of the cone in voxels (Fig. 7d). The
value t
v
= 0.45 · 10
−6
represents the time required to
access a single voxel in the database as shown in Table
1.
Compared to the recently proposed GPU driven
3D fusion technique from Niessner (Nießner et al.,
2013), the runtime performance is significantly lower.
Niessner reported processing times around 15ms,
which is possible when the data is cached in the in-
ternal GPU memory. In contrast to this, our method
focuses on multi-threading and distributed computing
which enables to obtain 3D models even when low
power and low cost sensors are set-up on vehicles and
the raw data is sent to a cloud computer. This strategy
enables to develop a server-client architecture where
the autonomous vehicles communicate with a central
server and update the local environment map from a
single consistent source.
a) b)
Figure 9: a) Point cloud from stereo, b) modelled surface of
the road.
7 CONCLUSION AND OUTLOOK
A highly efficient data structure for voxel based 3D
geometry has been presented. The approach enables
to model arbitrary geometries and to modify them dy-
namically, for instance when new 3D measurements
become available from a mobile robot. The technique
is fundamental to all long time operating robotic sys-
tems which are expected to interact with an unknown
environment.
An advanced 3D modelling technique has been
presented and applied on the 3D voxel database. The
application enables very large environments to be
modelled and to create high resolution maps.
Future research will focus on the integration of
loop-closing localization algorithms. Another aspect
of future developments will cover the extension of the
presented framework to a cloud computing architec-
ture. Low level communication with sensors, con-
sistent global mapping and client based visualization
will be targeted. The mid term goal of the project is an
ubiquitous framework focusing on 3D object detec-
tion, 3D mapping and visualization of huge 3D scene.
REFERENCES
Andreasson, H., Bouguerra, A., Cirillo, M., Dimitrov, D.,
Driankov, D., Karlsson, L., Lilienthal, A., Pecora, F.,
Saarinen, J., Sherikov, A., and Stoyanov, T. (2015).
Autonomous transport vehicles: Where we are and
what is missing. Robotics Automation Magazine,
IEEE, 22(1):64–75.
Baert, J., Lagae, A., and Dutr
´
e, P. (2013). Out-of-core con-
struction of sparse voxel octrees. In Proceedings of
the 5th High-Performance Graphics Conference, HPG
’13, pages 27–32, New York, NY, USA. ACM.
Baumbach, D. G. D. and Zuev, S. (2014). Stereo-Vision-
Aided Inertial Navigation for Unknown Indoor and
Outdoor Environments. In Proceedings of the Interna-
tional Conference on Indoor Positioning and Indoor
Navigation (IPIN), 2014 . IEEE.
Bekris, K., Shome, R., Krontiris, A., and Dobson, A.
(2015). Cloud automation: Precomputing roadmaps
for flexible manipulation. Robotics Automation Mag-
azine, IEEE, 22(2):41–50.
Chajdas, M. G., Reitinger, M., and Westermann, R. (2014).
Scalable rendering for very large meshes. WSCG
2014, International Conference on Computer Graph-
ics.
Curless, B. and Levoy, M. (1996). A volumetric method for
building complex models from range images. In Pro-
ceedings of the 23rd Annual Conference on Computer
Graphics and Interactive Techniques, SIGGRAPH
’96, pages 303–312, New York, NY, USA. ACM.
EUC (2015). FP7-Transport, Research supported by the
VISAPP 2016 - International Conference on Computer Vision Theory and Applications
254

European Commission. http://bit.ly/1btLACw. Ac-
cessed: 2015-09-22.
Floater, M. S. and Hormann, K. (2005). Surface parame-
terization: a tutorial and survey. In Dodgson, N. A.,
Floater, M. S., and Sabin, M. A., editors, Advances
in Multiresolution for Geometric Modelling, Mathe-
matics and Visualization, pages 157–186. Springer,
Berlin, Heidelberg.
Frisken, S. F., Perry, R. N., Rockwood, A. P., and Jones,
T. R. (2000). Adaptively sampled distance fields: A
general representation of shape for computer graph-
ics. In Proceedings of the 27th Annual COnference
on Computer Graphics and Interactive Tehniques,
pages 249–254. ACM PRess/Addison-Wesley Pub-
lishing Co.
Google inc. (2015). Google sparse hash, ver1.5.
http://goog-sparsehash.sourceforge.net/. Accessed:
2014-09-26.
Hirschmuller, H. and Scharstein, D. (2009). Evaluation of
stereo matching costs on images with radiometric dif-
ferences. IEEE Transactions on Pattern Analysis and
Machine Intelligence, 31(9):1582–1599.
Hornung, A., Wurm, K. M., Bennewitz, M., Stachiss, C.,
and Burgard, W. (2013). OctoMap: An efficient prob-
abilistic 3D mapping framework based on octrees. Au-
tonomous Robots.
Izadi, S., Kim, D., Hilliges, O., Molyneaux, D., Newcombe,
R., Kohli, P., Shotton, J., Hodges, S., Freeman, D.,
Davison, A., and Fitzgibbon, A. (2011). Kinectfu-
sion: Real-time 3d reconstruction and interaction us-
ing a moving depth camera. In ACM Symposium on
User Interface Software and Technology. ACM.
Lowe, D. G. (2004). Distinctive image features from scale-
invariant keypoints. Int. J. Comput. Vision, 60(2):91–
110.
Moulon, P., Monasse, P., and Marlet, R. (2013). Global fu-
sion of relative motions for robust, accurate and scal-
able structure from motion. In The IEEE International
Conference on Computer Vision (ICCV).
Nadaraya, E. A. (1964). On estimating regression. Theory
of Probability & Its Applications, 9(1):141–142.
Nießner, M., Zollh
¨
ofer, M., Izadi, S., and Stamminger,
M. (2013). Real-time 3d reconstruction at scale us-
ing voxel hashing. ACM Transactions on Graphics
(TOG).
Teschner, M., Heidelberger, B., Mueller, M., Pomeranets,
D., and Gross, M. (2003). Optimized spatial hashing
for collision detection of deformable objects. Pro-
ceedings of Vision, Modeling, Visualization (VMV
2003), pages 47–54.
Wu, C. (2011). Visualsfm: A visual structure from motion
system. http://ccwu.me/vsfm/. Accessed: 2015-08-
30.
Infinite 3D Modelling Volumes
255
