
Enhanced Depth Estimation using a Combination of Structured Light
Sensing and Stereo Reconstruction
Andreas Wittmann
1
, Anas Al-Nuaimi
1
, Eckehard Steinbach
1
and Georg Schroth
2
1
Chair of Media Technology, Technische Universitt Mnchen, Arcisstrae 21, Munich, Germany
2
NavVis GmbH, Blutenburgstrae 18, Munich, Germany
Keywords:
Stereo Vision, Google Project Tango, Structured Light, 3D Scanning.
Abstract:
We present a novel approach for depth sensing that combines structured light scanning and stereo reconstruc-
tion. High-resolution disparity maps are derived in an iterative upsampling process that jointly optimizes
measurements from graph cuts-based stereo reconstruction and structured light sensing using an accelerated
α-expansion algorithm. Different from previously proposed fusion approaches, the disparity estimation is
initialized using the low-resolution structured light prior. This results in a dense disparity map that can be
computed very efficiently and which serves as an improved prior for subsequent iterations at higher resolu-
tions. The advantages of the proposed fusion approach over the sole use of stereo are threefold. First, for
pixels that exhibit prior knowledge from structured lighting, a reduction of the disparity search range to the
uncertainty interval of the prior allows for a significant reduction of ambiguities. Second, the resulting limited
search range greatly reduces the runtime of the algorithm. Third, the structured light prior enables a dynamic
tuning of the smoothness constraint to allow for a better depth estimation for inclined surfaces.
1 INTRODUCTION
In recent years research and applications in 3D vi-
sion have been experiencing strong growth driven by
the increasing availability of low-cost hardware that
can sense the environment in 3D. Critical to these ad-
vancements was the release of the Microsoft Kinect
in 2010 which is the first consumer device that can
reliably sense its immediate vicinity in 3D and in
real time using the structured light (SL) sensing tech-
nique.
Other recent trends, including the proliferation of
smart portable devices, which are equipped with pow-
erful processors and a plethora of sensors, have called
upon the deployment of 3D sensors to enable new
applications including Augmented Reality. Indeed,
Google launched the first smartphone with an active
3D sensor, similar to that of the Kinect, named Project
Tango device (Piszczor and Yang, 2014). Other
companies, such as Occipital (Occipital, 2015), of-
fer smartphone attachable 3D sensors which use the
same sensing principle.
The deployment of such 3D sensors in portable
devices is significant but their impact may be lim-
ited by the characteristic limitations inherent to the
used sensing technique. Most notably, SL-based 3D
sensing has a relatively limited range of a few meters.
Critically, 3D sensing fails on glossy surfaces, edges,
fine structures and elements that are illuminated by
bright light owing to the infrared-based depth percep-
tion. The latter also severely degrades the usability
outdoors.
Unlike depth from SL, 3D reconstruction from
stereo can provide 3D data for larger distances, fine
structures as well as outdoor scenes. Contrary to
SL techniques, it benefits from bright illumination
and sharp object boundaries. However, local stereo
matching requires well-textured surfaces, something
SL-based 3D scanning does not depend on. Also,
global stereo reconstruction algorithms are often slow
and depend on the structure of the underlying scene,
which forbids its sole use for applications that require
a consistent performance.
The complimentary nature of depth from stereo
and depth from SL, as further demonstrated by a real
example in Section 3, motivated us to develop a joint
depth estimation algorithm that uses image and 3D
data acquired on a smartphone prototype to generate
enhanced depth images. It builds upon the strengths
of both sensing techniques while compensating for
their shortcomings. For this purpose, we utilized the
Google Project Tango device, henceforth also termed
“smartphone”.
512
Wittmann, A., Al-Nuaimi, A., Steinbach, E. and Schroth, G.
Enhanced Depth Estimation using a Combination of Structured Light Sensing and Stereo Reconstruction.
DOI: 10.5220/0005724605100521
In Proceedings of the 11th Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2016) - Volume 3: VISAPP, pages 512-523
ISBN: 978-989-758-175-5
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

To achieve our goal we combine a graph cuts-
based state-of-the-art stereo algorithm (Kolmogorov
et al., 2014) with the depth maps captured by the SL
sensor of the smartphone. To that end we redesigned a
global energy function typically used in stereo imag-
ing to incorporate the SL sensor data while consid-
ering its error characteristics as explained in Sec-
tion 4.1. Beyond solving for depth values using a
joint energy function, the algorithm utilizes the smart-
phones’s active range measurements to limit the dis-
parity label space for the stereo algorithm, resulting in
a substantially faster convergence (see Section 5). In
Section 4.2 we explain how this technique, which ex-
ploits depth priors from the smartphone, is applied in
an iterative process involving sequential upsampling
and stereo reconstruction to produce higher resolution
depth maps. The results in Section 5 demonstrate the
gains achievable with our proposed fusion scheme.
Prior to the detailed explanations of the contributions,
we give background information in 3D sensing and
survey related work on stereo-range data fusion in
Section 2. Also, the Project Tango device is briefly
presented in the same section.
2 RELATED WORK &
BACKGROUND
3D sensors can be broadly categorized into passive
and active sensors. The former rely on the ambient
lighting of the environment while the latter project
(visible or invisible) patterns or beams of light to
sense the environemt. Passive and active 3D sensors
are introduced in Section 2.1 and Section 2.2, respec-
tively. In Section 2.4 the Project Tango device, which
we simultaneously use for active and passive 3D sens-
ing, is briefly introduced. In Section 2.3 we survey re-
lated work on enhanced depth estimation with active
and passive 3D sensors.
2.1 Passive 3D Sensing
Standard passive 3D sensing involves capturing the
scene from multiple perspectives and using visual cor-
respondences to infer the 3D shape. There exists
a variety of approaches including multi-view stereo
(MVS) and structure-from-motion (SfM), that take
two or more images to reconstruct a 3D scene. A spe-
cial case is two-view stereo that only considers a pair
of images to derive the depth in a scene.
The aforementioned approaches either utilize sev-
eral cameras, or as in case of SfM, a single mov-
ing camera. Seitz et al. (Seitz et al., 2006) com-
pare different multi-view approaches which are typ-
ically slow and are generally applied in offline pro-
cessing. However, real-time capable SfM algorithms
such as Dense Tracking and Mapping (DTAM) (New-
combe et al., 2011) and Large-Scale Direct Monocu-
lar SLAM (LSD-SLAM) (Engel et al., 2014), which
both employ GPU computing to significantly speed
up processing, exist. Nevertheless, SfM-based multi-
view methods suffer from drift and an inherent scale
ambiguity that does not allow us to restore the true
scale of a scene. Multi-view stereo reconstruction
typically allows for a true scale representation of a
scene by utilizing a setup that involves multiple cam-
eras with rigid transformations among the individual
camera frames. Obviously, reconstruction via MVS
requires extensive efforts and is therefore not suited
for consumer use. The accuracy for multi-view ap-
proaches is not clearly related to the number of input
images. Furthermore, SfM reconstruction approaches
are only suitable for static scenes.
For two-view stereo matching approaches,
Scharstein and Szeliski (Scharstein and Szeliski,
2002) present a large number of techniques includ-
ing a performance assessment. Their datasets are
considered standard for performance evaluations in
stereo vision and their online database lists the latest
algorithms in this domain (Scharstein and Szeliski,
2015).
Advanced stereo reconstruction (henceforth al-
ways referring to two-view stereo except otherwise
noted) algorithms consider a global energy formu-
lation and find the set of disparities that minimizes
the energy function. The minimization is usually
performed with inference algorithms such as belief-
propagation (Felzenszwalb and Huttenlocher, 2006)
or graph cuts (Boykov et al., 2001). Tappen and Free-
man (Tappen and Freeman, 2003) compare the two
approaches. They conclude that belief-propagation is
in general faster than graph cuts but the results are less
smooth. Although Tappen and Freeman (Tappen and
Freeman, 2003) found graph cuts and belief propaga-
tion to perform similar on their dataset, we observed a
significantly better performance of graph cuts for our
real world datasets, which is why we decided to uti-
lize the state-of-the-art graph cuts stereo algorithm by
Kolmogorov and Zabih (Kolmogorov et al., 2014) in
our work.
2.2 Active 3D Sensing
Two major types of active 3D sensors exist: Time-of-
Flight (ToF) and Structured Light (SL).
ToF sensors emit infrared-light (IR) and capture
its reflection. The distance assigned to a pixel is
inferred from the time delay between emission and
Enhanced Depth Estimation using a Combination of Structured Light Sensing and Stereo Reconstruction
513

reception of the IR-signal. ToF sensors run in real
time and provide good results even on textureless sur-
faces. Yet, the sensors suffer from limited resolu-
tion as well as various error sources such as noise,
multi path, ”flying pixels” and are susceptible to back-
ground illumination (Foix et al., 2011). Due to size
and power limitations it is difficult to deploy ToF on
smartphones.
SL sensors work by projecting a light pattern onto
the scene and then capturing it with a camera. The
distortion is used to infer the 3D geometry as it is
a function of the 3D shape (Scharstein and Szeliski,
2003a). The light pattern acts as texture and hence
texture-less scenes can also be sensed. The Mi-
crosoft Kinect performs SL sensing on a dedicated
chip achieving real-time 3D imaging. Since the pro-
jected pattern is made up of IR light, it does not work
in the presence of sunlight. The projected pattern is
relatively weak due to power limitations thus limiting
the sensing range to < 10m. Since SL sensing essen-
tially performs stereo vision, the sensing accuracy is
a function of the IR camera resolution and the depth
of the scene. In our paper we show how to properly
account for the decreasing accuracy with increasing
depth in the fusion algorithm (Section 4.1.1).
2.3 Enhanced Depth Estimation
through Fusion
In (Wei-Chen Chiu and Fritz, 2011), a promising ap-
proach that utilizes cross modal stereo reconstruction,
known as IR-image RGB registration, is proposed to
find correspondences between the IR and RGB im-
ages of the Kinect. By combining the RGB channels
with appropriate weightings, the image response of
the IR-sensor is resembled, which allows for depth
estimation for reflective and transparent objects via
stereo reconstruction. Fusing the stereo reconstruc-
tion results with the structured light measurements
extends the abilities of the Kinect without the need
for additional hardware. The stereo reconstruction
approach proposed in our work does not require an
optimization as it is proposed by Wei-Chen et al. By
utilizing the same camera for both stereo images we
avoid a degradation of stereo resulting from the use of
two different cameras.
(Li et al., 2011), (Scharstein and Szeliski, 2003b)
and (Choi et al., 2012) achieve a highly accurate fu-
sion of structured light scans and stereo reconstruc-
tion by recording a projected pattern with a set of
stereo RGB cameras. The structured light sensor used
in our work provides reliable depth measurements out
of the box. Moreover, it records RGB and depth im-
ages from SL with the same sensor chip and therefore
achieves a highly precise alignment as well.
(Gandhi et al., 2012) generate a high-resolution
depth map by using ToF measurements as a low-
resolution prior that they project into the high-
resolution stereo image pair as an initial set of corre-
spondences. Utilizing a Bayesian model allows prop-
agating the depth prior to generate high-resolution
depth images.
In (Somanath et al., 2013), high-resolution stereo
images are fused with the depth measurements from
the Microsoft Kinect. The authors use a graph cuts-
based stereo approach for the fusion. Therefore, the
influence of the individual sensors is considered with
a confidence map, which is determined by the stereo
images as well as the Kinect measurements. For
the fusion, Somanath et al. project the SL measure-
ments into the high-resolution stereo images, which
results in a reduced confidence of the Kinect data. In-
stead, our setup allows capturing the RGB as well
as the depth images from SL with a single camera
and avoids the resulting alignment errors in the fu-
sion. Therefore, our confidence consideration is not
affected by alignment and projection issues and is
solely based on the error characteristics of the smart-
phones’s SL sensor.
The aforementioned stereo-range superresolution
approaches (Li et al., 2011), (Gandhi et al., 2012) and
(Somanath et al., 2013) perform a fusion of passive
stereo vision and active depth measurements by pro-
jecting a low resolution prior into the stereo images
to perform a fusion at high-resolution. In contrast,
we propose an iterative fusion approach that is ini-
tialized at the low-resolution of the SL depth images.
This approach results in a tremendous acceleration of
the correspondence computation, since both, the num-
ber of pixels that have to be assigned a disparity and
the considered label space, are much smaller at low-
resolution. Iteratively launching the algorithm with
the disparities found in the stereo-SL depth fusion al-
lows us to retrieve a superresolution depth image in
much shorter time than the previously mentioned ap-
proaches.
2.4 Google Project Tango
Figure 1 depicts the Google Project Tango device that
we use in our experiments to perform a fusion of
SL and stereo depth maps. The Project Tango de-
vice uses essentially the same sensing technique as
the Kinect. In fact, it is equipped with a Primesense
chip for hardware-based disparity computation (Gold-
berg et al., 2014), just as is the Kinect. Contrary to
the Kinect, however, the Project Tango device uses
the same camera (Identified as “4MP” in Figure 1)
VISAPP 2016 - International Conference on Computer Vision Theory and Applications
514
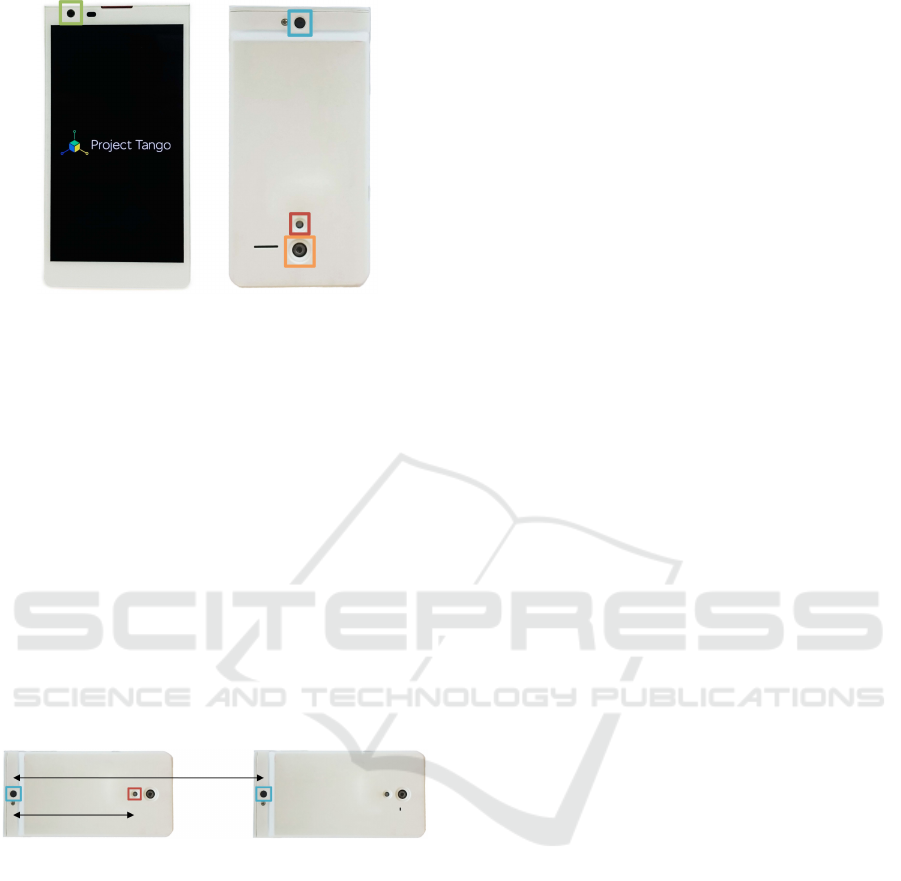
4 MP
IR projector
170
◦
fisheye-camera
Figure 1: Front and back view. The image sensors are high-
lighted. According to (Goldberg et al., 2014), the 4MP cam-
era is used to capture RGB images as well as the IR pattern,
projected by the IR projector, for depth estimation.
to capture RGB images as well as the projected IR
pattern for depth estimation. This is important since
both, the RGB and the corresponding SL depth im-
ages are readily aligned.
In our experimental setup, we achieve a horizon-
tal shift of b
stereo
between the stereo image pairs, as
shown in Figure 2, by moving the Project Tango de-
vice on a slider. Strictly speaking, this is SfM (see
Section 2.1). However, due to the controlled move-
ment, we are simulating a stereo camera pair.
The stereo depth image is computed w.r.t. the ini-
tial position and is fused with the SL depth image cap-
tured at the same position.
b
stereo
= 30cm
b
sl
Figure 2: Recording depth images with the Project Tango
device: The smartphone is moved by b
stereo
to capture a
stereo image pair. Simultaneously, the internal SL chip
computes a depth image using the projected IR pattern
which has an effective baseline of b
sl
, which we determined
in a calibration process.
3 PROBLEM FORMULATION
Here we illustrate the problem of depth estimation us-
ing solely SL sensing or only stereo reconstruction
more formally and demonstrate their complementary
properties to motivate our proposed solution for depth
map fusion using stereo and SL vision. For that, we
use the setup introduced in Section 2.4.
Figure 3 reveals the strengths and weaknesses of
the Project Tango device’s SL depth sensing abili-
ties. The figure shows an RGB image along with a
heatmap that encodes depth values up to a distance
of 10 meters. It can be seen that the sensor performs
well on nearby and smooth elements, but fails on illu-
minated or glossy surfaces. We note that although the
shown depth map has been generated with the Project
Tango device, it is exemplary for common SL 3D sen-
sors.
Similar to Figure 3, Figure 4 shows the depth map
for the same scene, however this time computed us-
ing standard stereo vision. In this case, the depth es-
timation provides good results for elements that are
affected by the projector image, as well as the glossy
poster in the scene. As expected, it fails on textureless
elements such as the wall or the nearby chair.
The complementary properties of the two depth
maps that correspond to Figures 3 and 4 are shown
in Figure 5. From a naive fusion, where the depth
estimate for a pixel is adopted from SL whenever
available and filled with a value from the depth map
from stereo otherwise, it can be seen that a depth map
with a substantially reduced amount of “holes” is pro-
duced. The figure clearly shows that a substantial
amount of depth data is contributed by either depth
map, hinting only the combination of both can lead
to significant improvement of the depth maps. Hence,
the goal of this paper is to develop a fusion approach
for joint stereo & structured light depth map esti-
mation. The complementary character of both tech-
niques inspired us to think of a more sophisticated fu-
sion than a simple naive fusion, since not only lots of
information gained from stereo vision is wasted, but
also geometric priors, typically incorporated in stereo
reconstruction through regularization, are enabled.
4 PROPOSED FUSION SCHEME
In this section we propose a fusion scheme that ex-
ploits the complementary properties of stereo recon-
struction and structured light sensing beyond the sim-
ple fusion approach presented in Section 3. To that
end, a global energy formulation that models the data
cost as well as the cost for the spatial configuration
of the disparities, as is typically the case in state-of-
the-art stereo vision, is considered. The data term of
the energy function is extended to incorporate prior
knowledge derived from the SL data as explained in
Section 4.1.1. This prior knowledge is also incorpo-
rated in the smoothness term, as explained in Section
4.1.2, to compensate for the shortcomings of typically
employed smoothness constraints in state-of-the-art
stereo reconstruction. The resulting fusion scheme
is applied in an iterative process involving sequen-
Enhanced Depth Estimation using a Combination of Structured Light Sensing and Stereo Reconstruction
515

0 2 4
6
8 10
d
c
b
f
e
g
a
d
c
b
f
e
g
a
Figure 3: Sample scene captured by Tango’s SL sensor. Depth values are color coded. 0 depth (dark blue) represents missing
depth data. Key regions are highlighted (
a
-
d
), where
a
does not include any depth information due to the projector
image that is confusing the IR-pattern;
b
is punctured with multiple holes indicating the maximum range of the SL projector
has been reached (exceeded). Also the depth values are strongly varying despite the planar shape which is due to the high
depth uncertainty at large distances;
c
highlights a glossy poster which makes the IR-pattern unusable for the IR-camera;
d
exhibits missing depth values next to the edge of the chair due to IR projection pattern occlusion;
e
displays the partly
reconstruction of the backs of two chairs illuminated by the projector image;
f
,
g
show the well estimated depth values for
the backs of the two nearby chairs.
0 2 4
6
8 10
c
b
f
e
g
a
c
b
f
e
g
a
Figure 4: Depth map from stereo using block-matching. Key regions are highlighted by boxes (
a
-
b
), where
a
shows a
richly textured area that allows a good reconstruction;
b
is poorly reconstructed as a result of missing texture in this area;
c
depicts a glossy poster that is well reconstructed;
e
provides rich texture for a good reconstruction ;
f
only allows a
fragmented reconstruction resulting from missing texture of the scene;
g
performs better than
f
despite having the same
shape owing to the poster.
tial upsampling and joint reconstruction to produce
higher resolution depth maps as explained in Sec-
tion 4.2.
Before diving into the details we want to note that
we interchangeably use the terms disparity and depth
since they are related directly to one another. As will
be apparent, however, all mathematical formulas and
the actual implementation are based on disparities and
disparity maps.
4.1 Joint Optimization using Stereo and
Strucured Light
We propose a fusion of structured light and stereo
depth maps based on the built-in sensors of the smart-
phone shown in Figure 2. The energy formulation
used to find the optimal set of disparities is inspired
by (Kolmogorov et al., 2014). The disparity f
p
∈
{L
1
, L
2
, . . . , L
n
}, for every pixel p ∈ P, is found such
that the resulting configuration of the disparities f
minimizes the energy
E( f ) = E
data
( f ) + E
smoothness
( f ) + E
A
( f ), (1)
where E
data
( f ) represents the data cost that also
incorporates the structured light measurements.
E
smoothness
( f ) considers the spatial configuration of
the disparities and E
A
( f ) aggregates the occlusion
and the uniqueness term which are explained in (Kol-
mogorov et al., 2014).
We note here that whenever using the word “orig-
VISAPP 2016 - International Conference on Computer Vision Theory and Applications
516

a
Fused depth map
b
Color coding of
depth source
Figure 5: Naive fusion of depth maps from stereo and struc-
tured light.
a
shows the depth map obtainable with a naive
fusion scheme adopting the SL value whenever available for
a pixel and using the stereo value otherwise.
b
Red implies
a depth value from stereo reconstruction was used as op-
posed to blue which encodes values from SL. Black means
no depth value sensed using either technique. Both sensing
techniques are seen to contribute significantly towards the
final outcome.
inal” we refer to Kolmogorov and Zabih’s algorithm
in its original form and as implemented by them.
4.1.1 Data Cost
We propose to extend the data term introduced in
Equation (1) which typically accounts for the stereo
matching cost C
BT
with an additional term to account
for the structured light measurements as follows:
E
D
( f ) =
∑
p
C
BT
(p) +C
SL
(p), (2)
where C
SL
describes the cost contributed by the struc-
tured light sensor. We propose to model C
SL
accord-
ing to
C
SL
(p) = w
1
c
SL
1 − e
( f
SL
p
− f
p
)
2
σ
2
SL
= w
1
c
SL
C
0
SL
(p).
(3)
The weighting factor w
1
controls the influence of the
cost term and c
SL
is the maximal penalty that can
be assigned. C
0
SL
(p) represents an inverse Gaussian
function and is motivated by the assumption of a nor-
mally distributed structured light disparity measure-
ment error. This cost term ensures that whenever a
prior measurement f
SL
p
is available and the considered
disparity f
p
deviates from it, a penatly is contributed.
More specifically, the cost added by C
SL
(p) depends
on the assigned disparity f
p
as well as the disparity
measured by the SL sensor f
SL
p
, weighted using the
Gaussian function. We define the weighting factor w
1
according to
w
1
=
(
ρ f
p
∈ [ f
SL
p
− 3σ
SL
, f
SL
p
+ 3σ
SL
]
0 else,
(4)
where ρ can be chosen from the interval (0, 1] accord-
ing to the weight to be assigned for the prior. We
are inspired for this particular design by the work of
(Khoshelham and Elberink, 2012) in which they in-
vestigated the Kinect’s sensing accuracy. Assuming
a normally distributed disparity measurement of con-
stant variance, they derived the depth measurement
error. They concluded and experimentally verified
that the depth measurement uncertainty has a standard
deviation that quadratically increases with the sensed
distance. Since the Project Tango device’s SL sen-
sor essentially works the same way, we use the same
uncertainty model assuming the error in the dispar-
ity domain is distributed in a Gaussian fashion with a
constant variance σ
SL
.
For the standard data term C
BT
(p) in stereo match-
ing, we use the Birchfeld-Tomasi pixel dissimilarity
measure (Birchfield and Tomasi, 1998) as follows:
C
BT
(p) = w
2
min
T (I
l
(p), I
r
(q))
2
, c
ST
, (5)
T (•, •) computes the data cost according to the com-
monly used Birchfeld-Tomasi dissimilarity measure
for the pixel at position p in the left image I
l
and the
pixel at position q in the right image I
r
. c
ST
trims the
cost and the weighting factor is set to be w
2
= 1 −w
1
.
We obtained the best results for considering the struc-
tured light related term with a larger weighting than
the Birchfeld-Tomasi term, resulting from the higher
reliability of structured lighting. We empirically de-
termined the best fusion results for w
1
∈ [0.6; 0.8],
depending on the underlying scene.
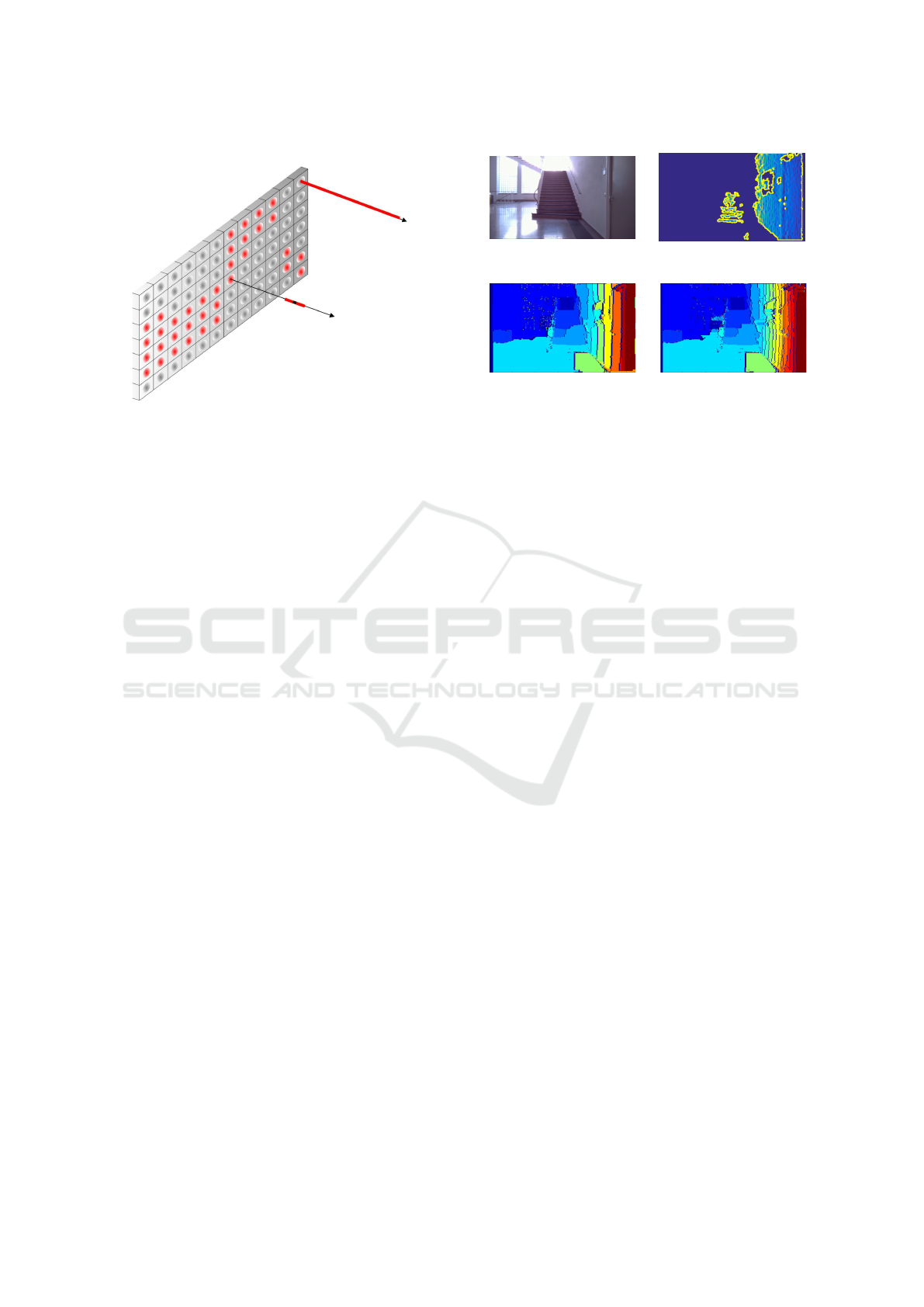
This particular energy formulation allows for a
significant acceleration of the computation of the dis-
parities. Figure 6 illustrates how the speed-up is
achieved. In the figure, the grid represents the pixel
positions for which the disparities have to be esti-
mated, which have to be evaluated for the whole la-
bel space [L
min
;L
max
], if no prior information from
the structured light depth map is available. Whenever
prior information is available from the SL data, indi-
cated by the red dots, the label search can be limited
to the uncertainty interval of the structured light mea-
surements. We explicitly limit the label space for f
p
to a range of f
SL
p
± 3σ
SL
, since there is a 99% chance
that the true disparity
ˆ
f
p
is within that interval assum-
ing normally distributed SL disparity measurements.
This reduces the complexity in case of large search in-
tervals and high-resolution stereo images significantly
as shown in the results (see Section 5).
4.1.2 Smoothness Cost
The smoothness term is based on the assumption
that neighboring pixels with similar intensity values
should be assigned the same disparity. If this assump-
tion is violated, a large penalty is added to the cost
function in Equation (1). In case of a strong contrast
Enhanced Depth Estimation using a Combination of Structured Light Sensing and Stereo Reconstruction
517
f
SL
p
(p) ± 3 σ
SL
L
max
L
min
Figure 6: Disparity label search space with and without
prior knowledge on the disparities.
among neighboring pixels, the penalty for changing
neighboring disparities is smaller and equal dispari-
ties among neighboring pixels do not contribute any
cost. In (Kolmogorov et al., 2014), the authors set the
threshold for similar pixels according to
max(|I
l
(p
1
) − I
l
(p
2
)|
∞
, |I
r
(q
1
) − I
r
(q
2
)|
∞
) < 8, (6)
where p
1
, p
2
are neighboring pixels in the left and
q
1
, q
2
in the right image. The smoothness term in (1)
can therefore be expanded to
E
S
( f ) =
∑
a
1
∼a
2
V
a
1
,a
2
· 1( f (a
1
) 6= f (a
2
)), (7)
where a
1
∼ a
2
indicates that pixels p
1
and p
2
are
adjacent and share the same disparity f
p
1
= f
p
2
. In
that case, both assignments should be either active
or inactive, hence 1 ( f (a
1
) 6= f (a
2
)), otherwise the
smoothness term contributes a penalty V
a
1
,a
2
. The
terms active and inactive refer to whether a disparity
is necessarily assigned to a pixel or a pixel is other-
wise labeled as occluded and accordingly not active.
In (Kolmogorov et al., 2014) the smoothness cost is
defined as follows
V
p
1
,p
2
=
3λ if max(|I
l
(p
1
) − I
l
(p
2
)|
∞
,
|I
r
(q
1
) − I
r
(q
2
)|
∞
) < 8
λ if max(|I
l
(p
1
) − I
l
(p
2
)|
∞
,
|I
r
(q
1
) − I
r
(q
2
)|
∞
) ≥ 8
, (8)
where λ is a constant that models the influence of the
smoothness term. However, in case of slanted sur-
faces (here we refer to surfaces that are not parallel to
the imaging plane and hence appear slanted) that ex-
hibit a homogeneous coloring, such as the wall on the
right hand-side of Figure 7
a
, the assumption that
neighboring pixels with similar intensity should be
assigned equal disparities is no longer valid and re-
sults in a clustering of the assigned disparity values as
a
Scene with slanted wall
b
Gradient map from SL
c
Original smoothness
constraint (8)
d
Modified smoothness
constraint (9)
Figure 7: Benefits of the modified smoothness constraint
compared to the original one used in (Kolmogorov et al.,
2014). The modified constraint exploits prior depth knowl-
edge from structured lighting to compute a disparity gradi-
ent map which is used to downweight the smoothness con-
straint for slanted surfaces disallowing the enforcement of a
uniform disparity on surfaces of homogeneous pixel inten-
sity however with a varying depth. Notice, the floor is still
largely assigned a single disparity value as no SL measure-
ments are available on this image region and accordingly a
gradient map for this region cannot be computed.
shown in 7
c
. To overcome this deficiency, we again
exploit the prior information available from the SL
sensor. We introduce an additional term that is based
on the gradient map of the structured light sensor data
(which is shown for the same example in Figure 7
b
)
such that the smoothness penalty becomes aware of
the existence of slanted surfaces and is adapted ac-
cordingly. More specifically, the smoothness penalty
is extended by
V
p
1
,p
2
= 0.1 λ if
c
O,l
≤ OD
SL
(p
1
) ≤ c
O,u
&
c
O,l
≤ OD
SL
(p
2
) ≤ c
O,u
,
(9)
where OD
SL
is the gradient map of the SL sensor
measurement. The constant c
O,l
(respectively c
O,u
)
serves as a lower (upper) threshold for the gradient
values. The thresholds are introduced to assign a low
smoothness penalty for slanted surfaces for which the
gradient values are supposed to vary within an inter-
val [c
O,l
;c
O,u
]. The gradient constraint in Equation
(9) is dominant and overrules Equation (8). The ad-
ditional constraint was found to significantly improve
the performance of the algorithm for slanted surfaces
as shown in Figure 7
d
.
VISAPP 2016 - International Conference on Computer Vision Theory and Applications
518
Downsample RGB
4 ↓
Joint
Optimization
Joint
Optimization
Joint
Optimization
Upsample 2 ↑
Upsample 2 ↑
Downsample RGB
2 ↓
RGB Full Resolution
320 × 180
1280 × 720
Iterative Upsampling
1
st
Stage
320 × 180
Iterative Upsampling
2
nd
Stage
640 × 360
Iterative Upsampling
3
rd
Stage
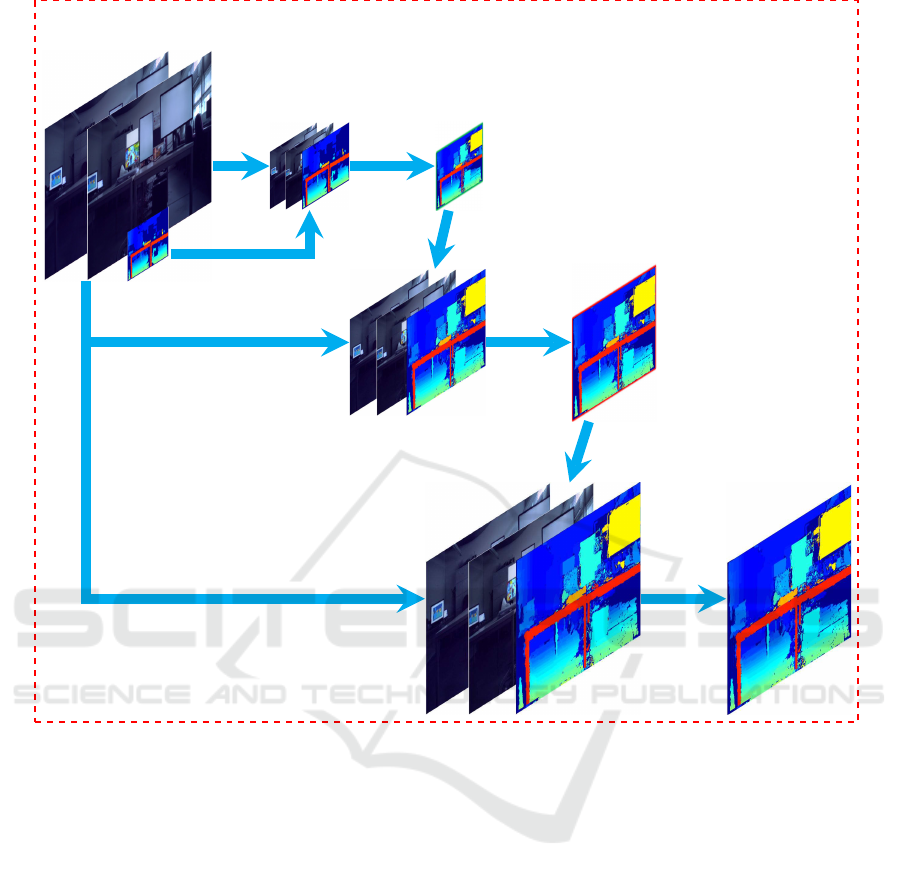
1280 × 640
Figure 8: Iterative fusion: Starting with down-sampled stereo images, a first iteration of fusion is very efficiently achieved
resulting in a dense depth map, which, after upsampling, serves as an enhanced prior for a second iteration of fusion at a
higher resolution. The process can be continued until achieving the desired resolution. In all stages, a joint optimization of
the prior and the RGB-images is performed by utilizing a global energy formulation.
4.2 Depth Map Superresolution
Since the structured light measurements and the
stereo images recorded with the Google Project Tango
device do not have the same resolution, we designed
an iterative algorithm that increases the resolution of
the disparity map from the low-resolution of the struc-
tured light sensor to the high-resolution of the stereo
images. As opposed to other approaches that project
a low resolution depth prior into the high resolution
stereo images to initiate a fusion, we propose an it-
erative approach that initializes the fusion at low-
resolution to obtain a dense disparity map, which is
then upsampled and used to reinitialize the algorithm
in a second iteration. Again, a nearest neighbor up-
sampling is applied to the disparity map found in the
second stage and the algorithm is initialized a third
time and converges at the resolution of the stereo im-
ages. The underlying rationale behind starting the fu-
sion at the lower resolution of the SL depth maps is
related to Equations (3) and (4). In essence, an up-
sampling of the SL depth image by a factor s to adapt
its resolution to the stereo image pair also implies ex-
tending the disparity search range by the same factor.
Accordingly, we do the converse by first downsam-
pling the stereo image pair. Hence, we obtain a great
reduction of the disparity search intervals for pixels
with and without a disparity prior, leading to a very
fast computation of the first fused depth map at the
same resolution of the SL depth map. The results
in Figure 12 show that this first fused depth map is
computed at a fraction of that with the full stereo im-
age pair resolution. This first fused depth map in turn
makes up a reliable prior for the second fusion stage
Enhanced Depth Estimation using a Combination of Structured Light Sensing and Stereo Reconstruction
519

a
Unprocessed image
b
Histogram equalization
+ bilateral filtering
c
Unprocessed image
d
Bilateral filtering with
background subtraction
Figure 9: Effect of histogram equalization + bilateral filter-
ing (
a
→
b
) and bilateral filtering with background sub-
traction (
c
→
d
) on sample images.
at the doubled resolution and in turn significantly re-
duces the disparity search space for the pixels. For the
first iteration, the disparity search range for a pixel p
that exhibits prior knowledge is set to f
SL
p
± 3σ as
explained in Section 4.1.1. However, if the disparity
map resulting from the first iteration of the algorithm
can be assumed to exhibit the true disparities, upsam-
pling it by a factor of 2
n
would result in an uncer-
tainty of ±2
n−1
pixels. Therefore, unlike in the first
iteration, the initialization of the proposed fusion al-
gorithm with the disparity map obtained from the pre-
vious stage upsampled by a factor of 2, only requires
a search interval of f
SL
p
± 1 pixels for a pixel p that
exhibits prior knowledge in the 2
nd
and 3
rd
stage. An
initialization of the algorithm with a dense prior there-
fore ensures a tremendous acceleration of the dispar-
ity computation for the 2
nd
and 3
rd
iteration of the
iterative fusion. Figure 8 shows the 3 stages of the
proposed algorithm.
5 RESULTS
This section presents results that we obtained using
the fusion approach explained in Section 4. Before
running the algorithm, the stereo images are prepro-
cessed to adjust their brightness and remove noise.
Depending on the image scene, we found a pipeline
of histogram equalization (Liling et al., 2012) and bi-
lateral filtering (Ansar et al., 2004) (see Figure 9
a
,
b
), or bilateral filtering with background subtraction
(Ansar et al., 2004) (see Figure 9
c
,
d
) to improve
the performance of the algorithm.
a
Depth from
structured light
b
Depth from
original graph cuts stereo
c
Our approach
1
st
stage
d
Our approach
3
rd
stage
Figure 10: From the depth map obtained using SL sens-
ing
a
many regions have no depth values due to bright
illumination or their surface properties.
b
shows a depth
map computed using state-of-the-art stereo reconstruction
via graph cuts. Of particular note is that several objects in
the scene are assigned a wrong disparity (e.g. the backs
of a chair, table top) which can be related to ambiguities
in the cost computation. Also, the slanted wall on the left-
hand side of the disparity map contains a large number of
missing assignments and exhibits a strong clustering of dis-
parities.
c
and
d
show the result achieved with the fusion
algorithm proposed in this work. Both disparity maps con-
tain a significantly higher number of disparity assignments
than
a
and
b
. At a first glance, both images look alike, but
d
has a higher spatial resolution (pixels) and depth resolu-
tion than
c
. The latter can be observed from the magnified
parts in
c
and
d
, where only two disparities are assigned
for the enlarged part of
c
, while for the enlarged part in
d
,
a range of disparity assignments results in a finer discretiza-
tion of the depth space (a seperate colormap is used for this
enlargement).
5.1 Datasets
To the best of our knowledge there exists no bench-
mark dataset for joint stereo-SL depth estimation. Ac-
cordingly, we show the results obtained on three sam-
ple scenes captured with the Project Tango device.
Through detailed analysis we highlight how individ-
ual blocks contribute towards providing a final esti-
mation that is better than that obtainable with either
stereo or SL reconstruction alone.
Lecture Hall: We generated depth images of
the scene shown in Figure 9
a
, with SL sensing and
VISAPP 2016 - International Conference on Computer Vision Theory and Applications
520

a
Uncertainty
1
st
stage
b
Uncertainty
structured light
c
Uncertainty
3
rd
stage
0 100 200 300
Figure 11: Uncertainty/resolution in the depth computation
for the first stage of the fusion algorithm
a
, the structured
light sensor
b
and the third stage of the iterative fusion
c
in mm. For
b
, the uncertainty/resolution is computed
using the focal length and the baseline b
SL
assuming a stan-
dard deviation in disparity measurement σ
SL
of
1
8
-pixel dis-
parities, a value adopted from a well-known fact about the
Kinect’s Primesense chip. The uncertainty/resolution plot
shows that the 3
rd
-stage of the iterative fusion approach has
a higher depth resolution than
a
and
b
.
stereo reconstruction as well as using our proposed
fusion algorithm. The resulting depth maps are de-
picted in Figure 10. The regions of the depth maps
covering surfaces illuminated by the strong light from
the projector reveal how beneficial the proposed fu-
sion of SL sensing and stereo reconstruction is. The
noise in the stereo depth map (Figure 10
b
) observed
on the back of the close chair no longer appears in the
fused depth map, as the adapted data term (Section
4.1.1) reduces the ambiguity in disparity assignments.
Furthermore, our approach reduces the clustering of
disparities, also observable in
b
, by utilizing a gradi-
ent map based on the SL measurements as explained
in Section 4.1.2.
Figure 11 shows the depth resolution of our ap-
proach vs. the depth resolution of the structured light
sensor of the Project Tango device. It can be seen that
the final stage of the suggested algorithm achieves
a better depth resolution than the SL measurements.
Figure 12: Computation time required by the original graph
cuts stereo reconstruction algorithm vs. computation time
of the iterative fusion approach for the dataset ”lecture hall”
in seconds. From left to right: original graph cuts stereo re-
construction, iterative fusion approach 1
st
stage, - 2
nd
stage
and - 3
rd
stage.
a
RGB image
b
Depth from
structured light sensing
c
Depth from
original graph cuts stereo
d
Depth using
proposed approach
Figure 13: The structured light sensor
b
could not cap-
ture the depth measurements for the monitors shown in
a
, since the infrared pattern cannot be retrieved in that
case. The original graph cuts stereo reconstruction algo-
rithm
c
shows many wrong disparity assignments, result-
ing from occlusion and ambiguities. The corresponding
disparity map also contains many fragments and is rather
noisy. The iterative fusion approach
d
instead, provides
a dense disparity map that outperforms the individual mea-
surements by far and even reconstructs the slanted wall and
floor, which is challenging for the original graph cuts stereo
reconstruction algorithm.
Beyond the enhanced depth image quality, the pro-
posed iterative fusion algorithm allows us to tremen-
dously reduce the computational complexity of the
disparity search, as illustrated in Figure 12. It shows
the processing times of the original graph cuts stereo
reconstruction algorithm vs. the three stages of the it-
erative upsampling approach. It can be seen that the
computation time of the depth image is reduced by
almost 90%.
Student Lab: Figure 13 depicts the evaluation
of the dataset ”student lab”, which shows a common
office environment. In this case, reconstruction using
structured light scanning fails for the monitors, which
disturbs the IR-pattern. However, the global stereo re-
construction approach successfully reconstructs most
of the monitors. The figure clearly shows how the
proposed iterative fusion approach compensates for
the shortcomings of both modalities and also allows
a strong reduction of the required computation time
from 1464s to 83.7s. In other words, the calculation
time is reduced by 94.3%.
Stairs: Figure 14 shows the evaluation of the
dataset ”stairs”. The scene exhibits a large number of
Enhanced Depth Estimation using a Combination of Structured Light Sensing and Stereo Reconstruction
521

a
RGB image
b
Depth from
structured light
c
Depth from
original graph cuts stereo
d
Depth using
proposed approach
Figure 14: The structured light sensor
b
is significantly
disturbed by the sunlight that can be observed through the
large glass windows. The original graph cuts stereo recon-
struction algorithm
c
fails to reconstruct the floor as well
as to resolve the large number of depth levels associated
with the steps. The slanted wall is represented by a few dis-
parity clusters and does not allow to recognize the geometry
of the scene. The iterative fusion approach
d
instead, per-
forms a good reconstruction of the slanted wall exploiting
the SL measurements and also resolves the fine depth levels
of the steps in the scene to a large extent. Stereo reconstruc-
tion also benefits the fusion by partly reconstructing the wall
in the background.
discrete depth levels at the steps of the stairs, as well
as a continuously increasing depth along the slanted
wall on the right hand side of
a
. The iterative fusion
approach allows resolving the fine depth levels of the
stairs and also outperforms the standard graph cuts
stereo reconstruction of the slanted wall in the scene.
The computation time of the graph cuts stereo algo-
rithm was measured with 560s, while all three stages
of the iterative fusion approach only require 48.7s,
which corresponds to a reduction 91.3%.
6 CONCLUSION
In this paper, we presented a novel approach to gener-
ate high-resolution depth maps from a fusion of a low-
resolution structured light prior with state-of-the-art
stereo reconstruction in an iterative process. Unlike
other approaches that perform a fusion of active and
passive methods in 3D imaging, we do not upsam-
ple a low-resolution prior to match the high-resolution
of the stereo images, but instead perform a fusion at
low-resolution and use the resulting disparity map as
a prior to iteratively reinitialize the algorithm until it
converges. This strategy has two major advantages.
Limiting the disparity search to the uncertainty inter-
val of the prior greatly reduces ambiguities and also
allows for a significant reduction of the runtime of the
algorithm. Initializing the fusion at low-resolution
amplifies the effect, as not only the disparity search
range for low-resolution images is smaller, but also
the number of pixels that have to be assigned a dispar-
ity. High-resolution disparity maps are then inferred
in an iterative upsampling process that ensures a con-
sistent computational complexity, also for sparse pri-
ors. For the fusion approach discussed in this paper,
we found the following points to have potential for
further improvement in future work.
• Without a prior, surfaces with continuously
changing disparities are challenging for the algo-
rithm. This problem could be reduced with an ad-
ditional constraint based on the stereo images.
• A GPU-implementation of the algorithm could
help to significantly accelerate the computation.
• Initializing the algorithm at even lower resolution
can further decrease the runtime.
REFERENCES
Ansar, A. I., Huertas, A., Matthies, L. H., and Goldberg, S.
(2004). Enhancement of stereo at range discontinu-
ities. In Defense and Security, pages 24–35. Interna-
tional Society for Optics and Photonics.
Birchfield, S. and Tomasi, C. (1998). Depth discontinuities
by pixel-to-pixel stereo. In Computer Vision, 1998.
Sixth International Conference on, pages 1073–1080.
Boykov, Y., Veksler, O., and Zabih, R. (2001). Fast ap-
proximate energy minimization via graph cuts. Pat-
tern Analysis and Machine Intelligence, IEEE Trans-
actions on, 23(11):1222–1239.
Choi, S., Ham, B., Oh, C., gon Choo, H., Kim, J., and
Sohn, K. (2012). Hybrid approach for accurate depth
acquisition with structured light and stereo camera.
In Broadband Multimedia Systems and Broadcast-
ing (BMSB), 2012 IEEE International Symposium on,
pages 1–4.
Engel, J., Sch
¨
ops, T., and Cremers, D. (2014). Lsd-slam:
Large-scale direct monocular slam. In Computer
Vision–ECCV 2014, pages 834–849. Springer.
Felzenszwalb, P. F. and Huttenlocher, D. P. (2006). Efficient
belief propagation for early vision. International jour-
nal of computer vision, 70(1):41–54.
Foix, S., Alenya, G., and Torras, C. (2011). Lock-in time-
of-flight (tof) cameras: A survey. 11(9):1917–1926.
Gandhi, V., Cech, J., and Horaud, R. (2012). High-
resolution depth maps based on tof-stereo fusion. In
Robotics and Automation (ICRA), 2012 IEEE Interna-
tional Conference on, pages 4742–4749.
VISAPP 2016 - International Conference on Computer Vision Theory and Applications
522

Goldberg, A. O., S., L., M., D., T., t., J., S., J., D.,
and T., G. (2014). Google tango teardown.
www.ifixit.com/Teardown/Project+Tango+Teardown/23835.
Khoshelham, K. and Elberink, S. O. (2012). Accuracy and
resolution of kinect depth data for indoor mapping ap-
plications. Sensors, 12(2):1437–1454.
Kolmogorov, V., Monasse, P., and Tan, P. (2014). Kol-
mogorov and Zabihs Graph Cuts Stereo Matching Al-
gorithm. Image Processing On Line, 4:220–251.
Li, Q., Biswas, M., Pickering, M. R., and Frater, M. R.
(2011). Accurate depth estimation using structured
light and passive stereo disparity estimation. In Im-
age Processing (ICIP), 2011 18th IEEE International
Conference on, pages 969–972.
Liling, Z., Yuhui, Z., Quansen, S., and Deshen, X. (2012).
Suppression for luminance difference of stereo image-
pair based on improved histogram equalization. Pro-
ceedings of the computer science and technology, 6:2.
Newcombe, R. A., Lovegrove, S. J., and Davison, A. J.
(2011). Dtam: Dense tracking and mapping in real-
time. In Computer Vision (ICCV), 2011 IEEE Inter-
national Conference on, pages 2320–2327. IEEE.
Occipital (2015). Occipital depth sensors.
http://occipital.com/.
Piszczor, M. and Yang, C. (2014). Project tango.
https://sites.google.com/a/google.com/project-tango-
sdk/home.
Scharstein, D. and Szeliski, R. (2002). A taxonomy and
evaluation of dense two-frame stereo correspondence
algorithms. International journal of computer vision,
47(1-3):7–42.
Scharstein, D. and Szeliski, R. (2003a). High-accuracy
stereo depth maps using structured light. In Com-
puter Vision and Pattern Recognition, 2003. Proceed-
ings. 2003 IEEE Computer Society Conference on,
volume 1, pages I–195.
Scharstein, D. and Szeliski, R. (2003b). High-accuracy
stereo depth maps using structured light. In Com-
puter Vision and Pattern Recognition, 2003. Proceed-
ings. 2003 IEEE Computer Society Conference on,
volume 1.
Scharstein, D. and Szeliski, R. (2015). A
taxonomy and evaluation of dense two-
frame stereo correspondence algorithms.
http://www.vision.middlebury.edu/stereo/.
Seitz, S. M., Curless, B., Diebel, J., Scharstein, D., and
Szeliski, R. (2006). A comparison and evaluation of
multi-view stereo reconstruction algorithms. In Com-
puter vision and pattern recognition, 2006 IEEE Com-
puter Society Conference on, volume 1, pages 519–
528. IEEE.
Somanath, G., Cohen, S., Price, B., and Kambhamettu, C.
(2013). Stereo+kinect for high resolution stereo cor-
respondences. In 3D Vision - 3DV 2013, 2013 Inter-
national Conference on, pages 9–16.
Tappen, M. F. and Freeman, W. T. (2003). Comparison
of graph cuts with belief propagation for stereo, us-
ing identical mrf parameters. In Computer Vision,
2003. Proceedings. Ninth IEEE International Confer-
ence on, pages 900–906. IEEE.
Wei-Chen Chiu, U. B. and Fritz, M. (2011). Improving
the kinect by cross-modal stereo. In Proceedings of
the British Machine Vision Conference, pages 116.1–
116.10.
Enhanced Depth Estimation using a Combination of Structured Light Sensing and Stereo Reconstruction
523
