
Assessment of Learner’s Algorithms
Ismail Bouacha
1
and Tahar Bensebaa
2
1
Ecole Pr
´
eparatoire aux Sciences et Techniques, Annaba, Alg
´
erie
2
LRI, Universit
´
e Badji Mokhtar, Annaba, Alg
´
erie
Keywords:
Assessment, Algorithmic, Learner, Program Comprehension.
Abstract:
In this paper we propose a method based on program comprehension to assess learners in algorithmic. This
method understands automatically the algorithms proposed by the students using comprehension methods
from the domain of the software engineering. To assess students propositions, we use prebuilt models of
algorithms. These models are documented with information and pedagogical characteristics, and they are
organized into tasks and subtasks. We recognize students propositions based on a distance calculus between
the model and the proposition. A first experiment and results are presented.
1 INTRODUCTION
This Communication addresses a central theme for
teaching: the assessment of learners. The introduc-
tion of LMS, MOOC have shown how difficult it is
to automate the evaluation of learners and that the
various proposals for generic and automatic evalu-
ations (MCQ or peer assessments) fail to target the
same objectives and levels of evaluation and diagno-
sis (Simkin and Kuechler, 2005)(Sitthiworachart and
Joy, 2004).
In computer science and more specifically in al-
gorithmic, there is no miracle solution, there is many
difficulties: diversity of elements to teach / assess
and levels of abstractions concerned, the plurality of
expected possible solutions. Methods of evaluations
have been taken into account various aspects punc-
tually: consideration of ”writing style” with meth-
ods based on static metric (Mengel and Yerramilli,
1999), brutal assessment of semantic proposals based
test sets (Chen, 2004), cognitive evaluation mistakes.
(Michaelson, 1996)
Our goal materialized by a first implementation
and a first experimentation, is to rely on human ex-
pertise to gain in generic, richness and completeness
of analysis. To achieve this goal, we moved the auto-
matic evaluation to the problem of automatic recog-
nition of patterns of expected copies, these models of
copies being provided by an expert or a teacher. By
this pattern recognition, we expect to reach a better as-
sessment by taking advantage of what these expected
models of copies have been characterized ”by hand”
and we believe also release the teacher from mark at-
tribution by building marks from a distance calcula-
tion between the proposals to be evaluated and the
model that has been previously marked by the expert.
2 PROPOSED ARCHITECTURE
AND GENERAL PROCESS
The overall system architecture includes in the center
a tool for understanding the proposals (depending on
the model proposed, the proposed problem and the
students proposition). The proposed algorithms space
has a dual function: ”algorithms edition” and ”models
modeling.”
The learner accesses that system through the in-
terface of a specific editor AlgoEditor belonging to
the space of algorithms expression that structure the
learners production allowing him writing only the
usual control structures (declaration , assignment,
conditional, etc.) according to predefined patterns to
complete. The use of this editor relieves learners of
some of the most basic editorial efforts. Thus, the
learner can focus on higher-level aspects of writing
algorithms and the system ensures that proposals are
syntactically correct.
This editor is also used by the teacher to model
the proposed models. Initially, the teacher can pro-
vide some models of a priori propositions. At recog-
nition attempts of the proposal, on failure of recog-
nition, the teacher is called upon to evaluate the pro-
Bouacha, I. and Bensebaa, T.
Assessment of Learner’s Algorithms.
In Proceedings of the 8th International Conference on Computer Supported Education (CSEDU 2016) - Volume 2, pages 73-76
ISBN: 978-989-758-179-3
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
73
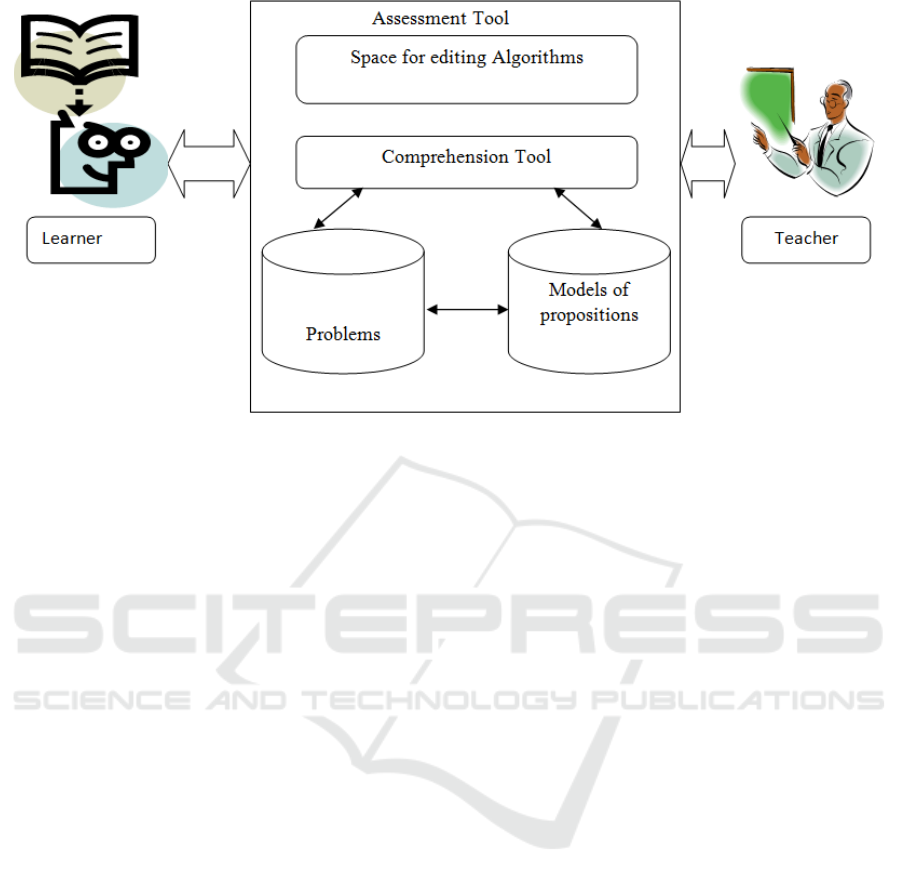
Figure 1: Global architecture of assessment tool.
posal and when the proposal is interesting in its view,
the teacher turned it into model to enrich all models
of proposition.
3 MODELS OF PROPOSITION
AND RECOGNITION
ALGORITHMS
Proposal model is produced from an a priori propo-
sition constructed by the teacher or learners concrete
proposal. It contains the code for a specified algo-
rithm and describes what is characteristic in the pro-
posal and the alternatives that this proposal could
have. In addition, a model may contain additional in-
formation to the highest level (presumed intentions of
the programmer, observed errors) and finally an over-
all score. The model is based on a decomposition of
the proposal in terms of tasks and sub-tasks, with as-
sociated descriptors. This decomposition and these
descriptors are inspired by the Software Engineering
program methods of understanding (Corbi, 1989). A
model for Proposal is composed of a proposal and the
following information:
1. Note: a global mark.
2. Tasks (and subtasks): All tasks and subtasks that
make up the proposal. Each task has a name, a lo-
cal rating, indications of ”critical lines” facilitat-
ing recognition, those instructions and descriptors
(for more details):
(a) authorize the absence of certain instructions or
certain tasks (or penalize),
(b) authorize any order between some instructions
or even between tasks (or penalize disorder),
(c) alternatives of an expression.
3. free comments
Figure 2 below shows a model for Proposal consists
of four tasks: Reading (line 7 to 10), Initialization
(line 11-12), Test (line 14-20) and Result (line 21-26,
omitted the figure). Assuming that the note of this
exercise is on 6 points, we could have the following
description for the reading task:
• The reading task is denoted 1 of 6.
• Instructions are between line 7 (starting) and line
10 (end).
• This work contains an indication of critical line
(lc) to line 9 (a critical line is an instruction
whose appearance in the code proposal indicates
the likely presence of a task of a given model.)
• This task is necessary, a penalty of 1 point is
awarded absence.
• This task must occur before the tasks and test re-
sult, a penalty of 0.5 points is given if the task is
after.
• The order between this reading task and the ini-
tialization task is indifferent.
The decomposing task and sub-task and adding
descriptors can extend the class of proposals accepted
for the same model. The objective is thus to achieve
greater flexibility for a given model and obtain par-
tial recognition. The models recognition algorithm is
inspired by the work in software engineering for pro-
gram understanding and retro-Eng (Selfridge et al.,
CSEDU 2016 - 8th International Conference on Computer Supported Education
74
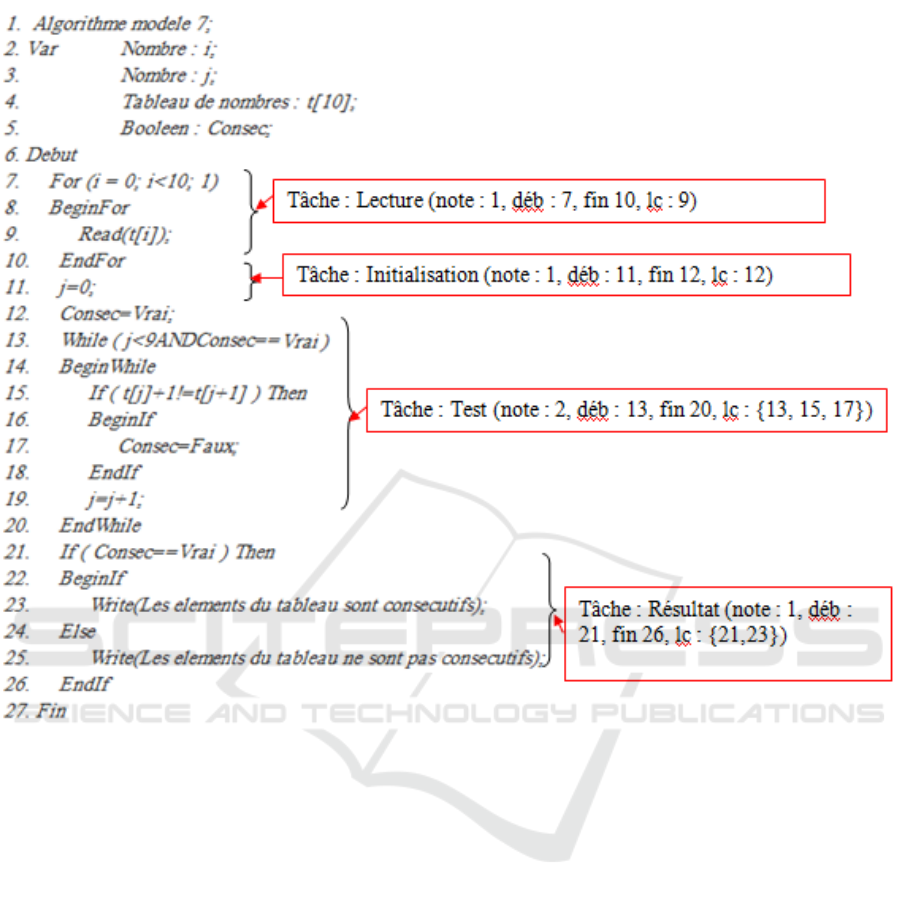
Figure 2: Proposal Model (decomposition of the task proposal).
1993). It is to abstract the names of variables, find
predefined patterns algorithms (task or sub-task, crit-
ical lines) and try to assemble these grounds to redial
the proposal. To implement the models recognition
process, we propose the following algorithm (Simpli-
fied):
1. Load the model and the proposal,
2. For each model:
3. Clone the variables of the proposal in the model,
4. Find the critical lines of the model,
5. Repeat:
6. Candidate ← recoverBestCandidate (models)
7. TryModel (candidate)
8. As long as available candidate & unacknowledged
proposal.
Upload variable allows a correspondence between
each one of the models variables and the equivalent
variables in the proposition, from which the clone.
We are looking for in each model critical lines lo-
calized in the proposal of the learner, after loading the
model variables. This research classifies models with
first those most likely to be consistent with the pro-
posal. To choose the best candidate among the pro-
posed models, we estimate the percentage of tasks lo-
calized with the percentage of critical lines localized
in the proposal of the learner. After getting a can-
didate model, the step ”TryModel (candidate)” is to
verify the correspondence between the candidate and
the proposal of the learner, by applying the following
algorithm (Simplified):
• For each model:
• For each instruction of the similar proposal at
the beginning of the task:
• For each instruction as a result of the current
task of the model:
• Find a similar statement in the wake of the
proposal
• DecideIfProposalIsRecognized
Assessment of Learner’s Algorithms
75

The idea is to try to find the tasks of the model
starting with their Beginning. Each possible begin-
ning is identified in the proposal. Next, the rest f the
task is sought. In the end, a final procedure deter-
mines if the proposal corresponds to the model and
what mark (or distance) can be assigned. This proce-
dure operates as a function of matches found and task
descriptors. Thus, only tasks with a descriptor in the
model that allows them to be absent may be missing.
Ditto for the descriptors on the order of tasks. The
mark given to the proposal will be maximum if the
match is complete and does not require the flexibility
allowed by the descriptors.
4 FIRST EXPERIMENTAL
RESULTS
To test our approach, we worked with copies of sec-
ond year computer science exam preparatory school
for science and technology Annaba, Algeria, on the
following exercise: write a program that checks
whether the elements a table (integer) are consecu-
tive or not (for example, the elements 4, 5, 6, 7, 8 are
consecutive while the elements 1, 3, 4, 5, 6 are not).
After manual correction of 22 copies, we could
extract 7 possible proposal templates (correct and in-
correct). With these models, we analyzed 72 new
copies automatically (TD from 4 different groups).
The average rate of recognition obtained was 56%
with a similar recognition rate for the different groups
of copies and it was similar for correct copies and in-
correct copies.
From models and copies of Groups 1, 2 and 3
we crossed the recognition results with analysis ”by
hand” carried out by three teachers. The agreements
between the different analyzes were large majority
(35 complete agreements, ie 66% of cases where all
the judges had the same opinion on the choice of a
model or the lack of recognition).
For the 31 copies recognized in groups 1, 2 and
3, an analysis of the assigned rating was performed.
Overall, a third of copies (11) received the same mark
(mark given on 6); for half the copies (15), the mark
received showed a difference of one point with the
score on the day of the exam; in 5 cases (16%), the
note differed from 2 or 3 points (6 points).
5 CONCLUSION, PERSPECTIVES
We have presented a method for recognition of the
learners algorithms. Our method takes advantage of
the application context to set up and use a basic al-
gorithm proposals models. The models are enriched
with information allowing the use of effective techni-
cal of program comprehension used in software en-
gineering, and scoring proposals algorithms from the
identified model and the distance between this model
and the proposal. An initial experiment from exam
papers gave interesting recognition rate (over 50%),
similar to the ”hand” recognition rate and marks for
the recognized copies closed to manual ratings. To
improve the rating, a promising approach would be
to combine the recognition algorithm with dynamic
algorithm for assessing the proposals based on test
cases (Bouhineau, 2013). Beyond the notation, we
also believe we can combine the models information
on the knowledge and skills relating to each task and
sub-tasks and enrich the assessment.
REFERENCES
Bouhineau, D. (2013). Utilisation de traits s
´
emantiques
pour une m
´
ethodologie de construction d’un syst
`
eme
d’aide dans un eiah de l’algorithmique. In EIAH 2013-
6e conf
´
erence sur les Environnements Informatiques
pour l’Apprentissage Humain, pages 141–152. IRIT
Press 2013.
Chen, P. M. (2004). An automated feedback system for
computer organization projects. Education, IEEE
Transactions on, 47(2):232–240.
Corbi, T. A. (1989). Program understanding: Challenge for
the 1990s. IBM Systems Journal, 28(2):294–306.
Mengel, S. A. and Yerramilli, V. (1999). A case study of
the static analysis of the quality of novice student pro-
grams. In ACM SIGCSE Bulletin, volume 31, pages
78–82. ACM.
Michaelson, G. (1996). Automatic analysis of functional
program style. In aswec, page 38. IEEE.
Selfridge, P. G., Waters, R. C., and Chikofsky, E. J. (1993).
Challenges to the field of reverse engineering. In
Reverse Engineering, 1993., Proceedings of Working
Conference on, pages 144–150. IEEE.
Simkin, M. G. and Kuechler, W. L. (2005). Multiple-choice
tests and student understanding: What is the connec-
tion? Decision Sciences Journal of Innovative Educa-
tion, 3(1):73–98.
Sitthiworachart, J. and Joy, M. (2004). Effective peer as-
sessment for learning computer programming. In
ACM SIGCSE Bulletin, volume 36, pages 122–126.
ACM.
CSEDU 2016 - 8th International Conference on Computer Supported Education
76
