
Forecast-augmented Route Guidance in Urban Traffic Networks based
on Infrastructure Observations
Matthias Sommer, Sven Tomforde and J
¨
org H
¨
ahner
University of Augsburg, Organic Computing Group, Augsburg, Germany
Keywords:
Traffic Guidance, Proactive Vehicle Routing, Time Series Forecasting, Organic Traffic Control.
Abstract:
Increasing mobility and raising traffic demands lead to serious congestion problems. Intelligent traffic manage-
ment systems try to alleviate this problem with optimised signalisation of traffic lights and dynamic route guid-
ance (DRG). One solution for the former aspect is Organic Traffic Control (OTC), offering a self-organised,
decentralised traffic control system. Based on OTC, this paper presents two proactive routing protocols, re-
sembling techniques known from the Internet domain, applied to the traffic routing problem: Distance Vector
Routing and Link State Routing. These protocols were adapted to utilise forecasts of traffic flows to offer
anticipatory and time-dependant DRG for road users. The efficiency of these protocols is demonstrated with
simulations of two Manhattan-type road networks under disturbed and undisturbed conditions. The results
indicate their benefit in terms of lower travel times and emissions, even under low compliance rates.
1 INTRODUCTION
Traffic congestion is a serious problem affecting all
traffic participants. The resulting waste of time and
fuel leads to billions of dollars lost annually
1
. Ur-
ban road networks come to their capacity limit due to
increasing demands. The complexity of these traffic
control systems, due to mutual influence of different
traffic control strategies, is not longer feasible for a
central instance. Thus, decentralised, self-organising
and self-optimising approaches, that better utilise the
existing infrastructure are needed. Organic Traffic
Control (OTC) (Prothmann et al., 2011) represents
such an approach. OTC selects the best known phase
durations at intersections depending on the current
traffic flow while learning the impact of its decision to
improve the signalisation behaviour over time. OTC
extends the existing traffic light controllers (TLC) at
intersections via the Observer/Controller architecture
(Tomforde et al., 2010). By communicating the lo-
cal delays (i.e. occurring at the underlying intersec-
tion) and estimated travel times to nearby intersec-
tions, TLCs have the ability to determine the short-
est paths to prominent destinations (such as the main
hall or the main station) based on the current traffic
flows within the network. The benefits of dynamic
1
Urban mobility report, http://mobility.tamu.edu/ums/
(last access: 2016-02-02)
route guidance (DRG) systems are the alleviation of
congestion, the enhancement of the performance of
the road network, and the provision of navigational
assistance for travellers which are unfamiliar with the
network (Dong, 2011).
Routing protocols compute the fastest or shortest
route from a starting point to a destination. This cal-
culation is typically based on static information or re-
cently monitored traffic data. The computed routes
may then be visualised via Variable Message Signs
(VMS) or on a navigational system and give drivers
an indication how to traverse the network to reach
their destination as fast as possible. This approach
yields significant problems: First, the drivers need
time to follow their proposed route. The traffic sit-
uation might have changed and so, the routes might
be outdated. This leads to repeated re-routings, de-
creasing the acceptance of the route guidance mech-
anism. Second, especially in situations with devel-
oping congestion, a fast reaction is valuable to avoid
further negative impacts on the traffic. Forecasts of
the future traffic flow patterns help to detect capacity
shortages in advance.
This paper presents two novel, anticipatory and
time-dependent route guidance protocols for usage
in the infrastructure: Temporal Link State Rout-
ing (TLSR) and Temporal Distance Vector Rout-
ing (TDVR). These protocols are used to distribute
Sommer, M., Tomforde, S. and Hähner, J.
Forecast-augmented Route Guidance in Urban Traffic Networks based on Infrastructure Observations.
In Proceedings of the International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2016), pages 177-186
ISBN: 978-989-758-185-4
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
177

knowledge about forecasts of the traffic flow for sev-
eral future time steps in combination with current
route states. Thereby, both concepts extend Distance
Vector Routing (DVR) and Link State Routing (LSR)
that were adapted for urban road networks (Proth-
mann et al., 2012) which just consider the current
traffic conditions. Furthermore, the learning forecast
module within the OTC system is presented which al-
lows for proactive adaptation to upcoming changes in
traffic demand. The major goals are the improvement
of the network’s robustness and the minimisation of
the average travel time and emissions by preventing
congestion. A better distribution of the traffic streams
allows to use the capacity of the road network more
efficiently. The performance of the novel protocols
is investigated in a simulation-based evaluation with
two artificial networks under free flow and disturbed
conditions. The considered disturbances are due to
high traffic demands and incidents modelled as abrupt
blockages. The evaluation results indicate that proac-
tive route guidance lowers the overall travel times and
delays for road users. The algorithms are evaluated
with several compliance rates (i.e. the degree to which
drivers follow the route recommendations), showing
the benefit of our approach even under low compli-
ance rates.
The remainder of this paper is structured as fol-
lows: Section 2 presents a short overview of the state
of the art in DRG in urban road networks. Section 3
briefly introduces the OTC system and its main com-
ponents. The routing component and the new rout-
ing protocols are discussed in Section 4. Section 5
presents the evaluation results. The paper concludes
with an outlook to future work in Section 6.
2 STATE OF THE ART
Research in the field of vehicular route guidance can
be categorised in a variety of ways (Schmitt and Jula,
2006). The routes can be computed in a static or in
a dynamic fashion. First, static methods compute a
fixed route before the start of the trip. Today, many
cars come equipped with on-board GPS-based navi-
gation systems (such as Garmin or TomTom) (Kaplan,
2005). The navigation relies on installed maps of the
network which are mostly used by modified versions
of the Dijkstra (Dijkstra, 1959) or the A* algorithm
(Hart et al., 1968). They are applied to find the short-
est route for a given starting point and a fixed destina-
tion (Prothmann et al., 2012; Nannicini et al., 2012).
Dong (Dong, 2011) presents a brief summary of the
published literature on in-vehicle route guidance sys-
tems until 2010. Second, reactive routing protocols
also compute a route upfront. This can be subject to
change during the trip, depending on the real-time in-
formations received. The protocol reacts to chang-
ing traffic conditions and computes a new route based
on these information. Third, predictive routing proto-
cols go one step further. Apart from reacting to the
current situation, but furthermore, they generate fore-
casts of the upcoming traffic streams and incorporate
those forecasts into the computation of the proposed
route. It was shown that reactive protocols and espe-
cially predictive approaches lower the average travel
time in urban road networks (Fu, 2001), whereas re-
active protocols are less complex than predictive sys-
tems, at the cost of decreased robustness against inci-
dents and congestion (Schmitt and Jula, 2006).
Furthermore, DRG systems can be divided into
centralised an decentralised approaches. A study of
decentralised strategies for route guidance (F.S. Zu-
urbier and van Zuylen, 2006), comparing centralised
an decentralised systems, points out that decentralised
approaches have lower computational complexity, are
easily scaled and extended, while being more robust
against failures and measurement errors than cen-
tralised systems, but might only come up with a sub-
optimal system-wide solution. In a centralised sys-
tem, all data is gathered in a traffic management cen-
tre where route proposals are computed for the entire
network, taking into account system-wide objectives.
SACaNT-CNV (Simulation of Anticipatory Net-
work Vehicle Traffic - Convergence) is a decen-
tralised, proactive route guidance system (Wunder-
lich et al., 2000). Equipped vehicles are routed on a
next-hop basis, each vehicle having a compliance rate
of 100% (i.e. strictly following the proposed route).
Non-equipped vehicles are assumed to statically fol-
low the shortest free-flow routes. To determine the
route proposals, time-dependent link travel times are
used in a traffic simulation. It was shown that this
approach leads to faster travel times for equipped ve-
hicles.
(Dong et al., 2006) propose a user-equilibrium
time-dependent traffic assignment algorithm, using
the simulation assignment model DYNASMART.
They estimate the current traffic conditions and derive
short-term road utilisations to forecast travel times.
Their results indicate that this route guidance strategy
may reduce the total trip time.
Other decentralised approaches rely on car-2-car
communication based on floating car data. A modi-
fied version of the Internet routing protocol BeeHive
(Horst F. Wedde et al., 2007) resulting in the BeeJamA
protocol routes traffic participants on a next-hop basis
from intersection to intersection. Navigation servers
store and manage regional routing tables with routes
VEHITS 2016 - International Conference on Vehicle Technology and Intelligent Transport Systems
178
to other areas. These entries are updated based on data
sent by vehicles that are assumed to repeatedly trans-
mit their position, speed and destination. OTC does
not demand additional hardware in vehicles and elim-
inates the single point of failure of a central server
with a decentralised approach.
A delegate multi-agent system based on ant be-
haviour was presented in (Claes et al., 2011). It rep-
resents a decentralised approach for anticipatory ve-
hicle routing. Every vehicle has to be equipped with a
smart device, depicting the vehicle agent that gathers
data from the vehicle, such as its state and location,
and transmits these to infrastructure agents along the
road and to nearby vehicle agents. The vehicle agents
use this information to forecast road occupancies to
determine the best route to their destination.
In contrast to some of the previous approaches, the
DRG mechanism proposed in this paper does not rely
on equipped vehicles. The flow and the signalisation
data are available at the responsible TLC (e.g. via
loop detectors or video cameras), representing a de-
centralised and proactive approach.
3 ORGANIC TRAFFIC CONTROL
Current traffic management systems usually rely on
fixed-time signal plans. Thus, they are not able to
adapt to the highly dynamic traffic patterns and to re-
act to unforeseen situations, leading to longer travel
times and higher emissions. OTC (Prothmann et al.,
2011) extends parametrisable fixed-time controllers,
offering a self-adapting, self-optimising system that
transfers the traditional design-time decisions to run-
time. OTC consists of four basic components: a)
adaptive control of traffic lights, b) traffic-dependent
establishment of Progressive Signal Systems, c) dy-
namic route guidance and d) forecasting of traffic sit-
uations.
3.1 Adaptive Control of Traffic Lights
OTC handles the adaptation of green times at traffic
lights at intersections according to the present traffic
conditions. The self-learning, self-optimising system
follows a safety-oriented concept that allows OTC to
adapt within certain controlled boundaries. Each in-
dividual instance of OTC is fully decentralised and
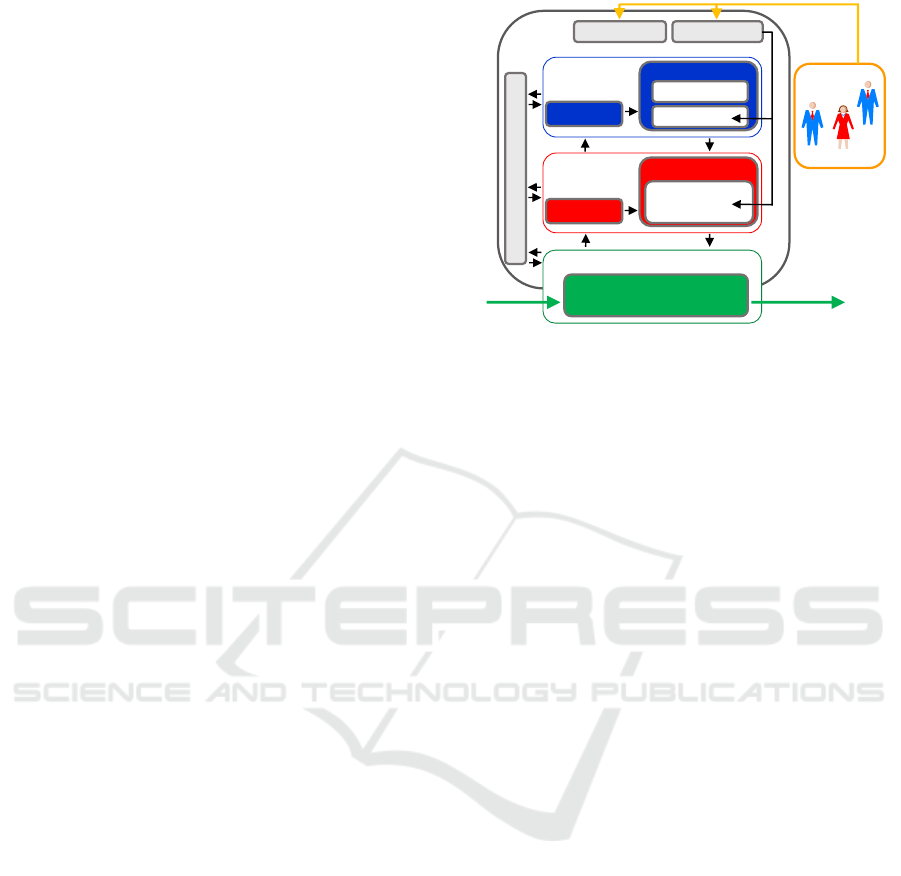
controls one intersection only. Fig. 1 depicts the Ob-
server/Controller architecture applied to traffic con-
trol. The System under Observation and Control
(SuOC) situated at Layer 0 is a parametrisable fixed-
time TLC. It offers interfaces for monitoring of detec-
tor data and adaptation of signal plans. The Observer
Layer 3
Layer 0
Control
signals
User
System under Observation
and Control (SuOC)
Layer 1
Parameter selection
Observer
Controller
Modified
XCS
Layer 2
Offline learning
Observer
Controller
Simulator
EA
Collaboration mechanisms
Monitoring Goal Mgmt.
Detector
data
Figure 1: Architecture of an OTC-controlled TLC.
at Layer 1 retrieves raw data from the SuOC which
is processed in the following (e.g. filter noise or gen-
erate forecasts). This component provides a situation
description of the traffic flow of the intersection for
the corresponding Controller on Layer 1. This Con-
troller is represented by a learning classifier system
with a database of rules (signal plans matched to situ-
ations). These are selected based on the current situa-
tion and actuated on Layer 0. Before a new signal plan
is added to the rule base, it is simulated and evaluated
based on an optimisation heuristic on Layer 2. The
simulator is configured with the topology of the inter-
section and the current traffic situation. It evaluates
several signalisation plans based on an evolutionary
algorithm. The signal plan offering the lowest average
delay is returned to Layer 1. As simulations tend to be
time-consuming, Layer 2 acts in parallel to Layer 1.
At last, Layer 3 provides an interface for monitoring
and goal management. A more detailed description of
the process is given in (Prothmann et al., 2012).
3.2 Progressive Signal Systems
TLCs that are located at nearby intersections which
are directly connected via streets may communi-
cate with each other to form a distributed coordi-
nation of intersection controllers. Through this col-
laboration, Decentralised Progressive Signal Systems
(DPSS, also called ”green waves”) may be estab-
lished. The mechanism is a three-step-process: 1)
identification of possible partners, 2) negotiation of
parameters and timing restrictions, and 3) establish-
ment of the DPSS for the most prominent streams
within the network (streams with the highest traffic
flows) leading to lower travel times while increasing
the throughput.
Forecast-augmented Route Guidance in Urban Traffic Networks based on Infrastructure Observations
179

3.3 Dynamic Route Guidance
To turn OTC in an even more robust traffic control
system, a self-organised route guidance mechanism
has been integrated that computes the fastest routes
through the network to prominent places based on the
current traffic conditions. Techniques from the In-
ternet domain, such as the Distance Vector Routing
(DVR) and the Link State Routing (LSR) protocol
(Tanenbaum, 2002) were adapted to road traffic guid-
ance (Prothmann et al., 2012). Since these protocols
work well for a complex network with a huge number
of nodes, such as the Internet, we see it as an appropri-
ate approach for urban road networks. TLCs use the
existing communication infrastructure to send their
locally monitored traffic situations to nearby TLCs.
This situation description contains the turning delays
(approximated with a formula from (Webster, 1958),
Equation 1) and the estimated travel times for outgo-
ing sections (based on a formula from the U.S. Dept.
of Transportation (USDOT)
2
, Equation 2). Assum-
ing that M corresponds to the turning’s current traffic
flow in vehicles per hour, S denoting the saturation
flow (the maximal flow assuming permanent green),
t
c
representing the cycle time of the intersection and
t
g
denoting the turning’s effective green time, the turn-
ing’s delay is calculated as:
t
d
= 0.9 ∗ [
t
C
∗ (1 −t
g
/t
C
)
2
2 ∗ (1 − M/S)
+
1800 ∗ g
2
M ∗ (1 − g)
] (1)
Finally, g =
M
t
g
/t
c
∗S
corresponds to the degree of sat-
uration of the turning for the current green time and
traffic flow. The estimated travel time for a section is
computed in dependence of the monitored traffic flow
M as:
t
d
= t
F
∗ (1 + (M/C)
2
) (2)
where t
F
=
s
v
denotes the travel time during free flow
conditions based on the length s and the speed limit
v of the section. C is the estimated maximal capacity
of the section calculated according to formulas given
by the USDOT. The result is an up-to-date description
of the networks traffic situation, from which routes to
arbitrary destinations can be derived. Each TLC lo-
cally determines the routes with the lowest travel time
which are then visualised through VMSs at each inter-
section. Momentarily, only the route with the lowest
travel time is displayed, but it can be easily extended
to output alternative route recommendations. This
approach showed to be especially profitable during
disturbed conditions (Prothmann et al., 2012), low-
ering the network-wide travel times and the number
of stops.
2
http://www.fhwa.dot.gov/ohim/hpmsmanl/appn7.cfm
OTC provides new route recommendations at each
intersection on a next-hop basis. It is assumed that
not all road users follow these suggestions as each in-
dividual driver optimises his route without respect to
the network-wide optimum. Thus, decentralised route
guidance may result in an user-optimised equilibrium
but not an optimum for the entire system. Previous re-
search reports a widely varying acceptance of VMS-
based route recommendations, ranging between 20%
(Erke et al., 2007) to 70% (Emmerink et al., 1996).
Momentarily, only the current traffic flows are
considered for the route proposals. So, drivers can
be confronted with several route changes during high-
load and quickly changing traffic conditions. This
is due to the continuous change of traffic conditions
while the vehicles traverse the network. Therefore,
the initial route recommendation might already be
outdated at the next intersection, possibly leading to
a reduction of the system’s acceptance. Our proac-
tive protocols take forecasts of traffic flows into ac-
count. They consider current and upcoming traffic
flows, turning the existing reactive DRG system into
a more robust, proactive and anticipatory one. It is
assumed that this approach reduces the re-routing de-
mands, leading to a broader acceptance of the system,
and making it more reliable. Forecasts of the future
traffic flow enable the detection of capacity shortages
in advance.
3.4 Forecast Module
Recent work (Sommer et al., 2015) focused on the
development of a self-optimising forecast module for
time series. This module is situated in the Observer
at Layer 1. It offers a dynamic weighting of forecasts
from several forecasting techniques based on historic
knowledge. Furthermore, it classifies the time series
based on their characteristics, such as trend, season-
ality or non-stationarity. If necessary, it automati-
cally processes time series to normalise them or to
make them stationary. Several forecast methods inde-
pendently compute forecasts based on their individual
model and data. These forecasts are then combined by
a combination strategy. The applied strategies range
from a simple average to sophisticated machine learn-
ing algorithms. Finally, the combined forecast is re-
turned. The module itself learns the best configura-
tion during runtime. Therefore, no system expert is
needed to determine the best combination of the ap-
plied forecasting techniques during design time. Only
the active forecast methods and the combination strat-
egy have to be specified. In this context, the forecast
component is used to estimate the future traffic flows
on sections and turnings.
VEHITS 2016 - International Conference on Vehicle Technology and Intelligent Transport Systems
180

4 DYNAMIC ROUTE GUIDANCE
IN URBAN ROAD NETWORKS
Communication links between neighbouring intersec-
tions allow TLCs to exchange estimated travel times
and delays to calculate alternative routes to prominent
destinations under the current traffic demand and sig-
nalisation. A route is defined by an origin, a desti-
nation, and the connecting roads in-between. Each
TLC is extended by a routing component (RC) that
allows for a self-organised, fully decentralised route
guidance. With the help of a routing protocol, travel
times are distributed in the network and routing tables
containing the proposed routes are managed. Each in-
tersection manages its own routing tables. Its entries
are of the form: ”to destination X, turn right, esti-
mated arrival time: y seconds”. This information is
then displayed by VMS. In the following, these pro-
tocols and their modifications towards proactive route
guidance based on traffic flow forecasts are explained.
4.1 Requirements for a Real-world
Deployment
To deploy OTC in a real-world scenario, some pre-
conditions have to be met. First, sensors are needed
that monitor the current traffic conditions. Inductive
loop detectors resemble a cheap and well established
monitoring technique in traffic management applica-
tions (Parkany and Xie, 2005). Second, the OTC logic
works as an extension of the existing TLCs at sig-
nalised intersection. We assume that these controllers
are parametrisable. For a fast and reliable compu-
tation, more computational power might be needed.
With the help of the communication infrastructure,
travel costs can be distributed in the network. A short-
est path algorithm has to utilise this data to deter-
mine the routes with the lowest travel time. Further-
more, routing protocols are needed to derive and dis-
tribute the route recommendations. At last, we need
devices providing the route recommendations for the
drivers. This can be realised with VMS (collective
systems), or in case car-to-infrastructure communica-
tion is available, via direct communication to smart-
phones or the cars’ navigational system (individual
systems). Besides these characteristics, OTC does not
need further changes – especially no sophisticated de-
tection and analysis devices.
4.2 Link State Routing (LSR)
A modified version of the Internet protocol LSR
serves as route guidance heuristic. It broadcasts es-
timated travel times for each section and each turning
movement whereby the best routes are derived. The
protocol works as a three step process: 1) Each RC
estimates the local delays for each turning of the in-
tersection and communicates those to all other RCs in
the network using broadcast messages (so-called ad-
vertisements). These delays are calculated based on
the current waiting times during red light phases and
the estimated travel time to a next intersection based
on the current traffic flow. These advertisements con-
tain link states describing a path from a starting inter-
section to a destination and its estimated travel time.
2) After receiving all advertisements from the other
RCs, each RC builds a graph by connecting the sub-
graphs obtained from the link states. It represents
the topology, the current traffic flows and the approx-
imated travel times within the network. 3) Finally,
every RC locally computes the best routes. The Dijk-
stra algorithm is used to calculate the paths with the
lowest travel time from each TLC to all reachable des-
tinations based on the previously generated network
graph. In a final step, the interior routing tables for
the approaching roads are updated with the best route
to all reachable destinations. Each table entry now
contains entries for each incoming section, the des-
tination, the recommended next turning and the esti-
mated travel time to this destination. Further details
on the existing LSR mechanism are given in (Proth-
mann et al., 2012).
4.3 Temporal Link State Routing
(TLSR)
The novel TLSR protocol resembles an extension of
the LSR protocol, utilising current traffic demands
and forecasts of future traffic flows. By broadcast-
ing graph-series that encode the current and the fore-
casted traffic flows, TLSR is able to consider the time-
dependant changes of traffic.
Time-dependent Representation. 1) The local de-
lays are estimated for the current traffic flow and for
a number of traffic flow forecasts for future points
in time. Based on previous forecasts and the actual
values, the forecast accuracy and its standard devi-
ation can be determined. These forecasts and fore-
cast errors are added to the advertisements and also
broadcasted to other RCs. 2) The edges (representing
roads) of the network graph represent the current traf-
fic flow and the forecasts for different points of time in
the future, converting the network graph into a time-
dependant representation. 3) The benefit of the incor-
poration of the received forecasts is highly dependant
of their accuracy and of the degree to which they are
taken into account for the calculation of route recom-
Forecast-augmented Route Guidance in Urban Traffic Networks based on Infrastructure Observations
181

mendations. Thus, the Dijkstra algorithm computes
the fastest routes with respect to the forecast accura-
cies.
Reliability-considering Dijkstra. The derivation
of qualitative route recommendations depends heav-
ily on the degree to which forecasts are taken into ac-
count. This ranges from only relying on current traf-
fic conditions (which is similar to the previous pro-
tocol) to considering long periods of predicted traffic
demands. To estimate the reliability of the forecast F
t
,
the sending RC calculates the Mean Absolute Scaled
Error (MASE) (Hyndman and Koehler, 2006) where
the scaled error q
t
is defined as
q
t
=
Y
t
− F
t
1
n−1
∑
n
i=2
|Y
i
−Y
i−1
|
(3)
with Y
t
is the current traffic flow and Y
t−1
is the traffic
flow of the previous measurement. The absolute error
is scaled based on the in-sample mean absolute error
from a benchmark forecast method. The MASE is
then calculated as
MASE = mean(|q
t
|) (4)
with mean(|q
t
|) denoting the sample mean of q
t
over a
certain period. A scaled error of less then one arises if
the forecast is better than the average naive one-step
forecast computed in-sample. This error measure is
sent to other controllers which determine the degree to
which they consider the current flow, respectively the
forecasts. The lower the MASE, the higher the trust in
its accuracy. Likewise, the influence of the forecast on
the estimated travel time calculation raises. Finally,
the current flow Y
t
and the forecast F
t+1
are combined
based on a smoothing function computed as
x
∗
t
= αY
t
+ (1 − α)F
t+1
where 0 ≤ α (5)
where α is the MASE. An optimal MASE of 0 re-
sults in only considering the forecast and a MASE of
1 or higher in only considering the currently moni-
tored flow. We limit the maximum MASE to 1. The
result x
∗
t
then serves as the new estimated delay for
the according turning or section. Previously, Dijkstra
considered only one value per edge of the network.
Now, the edges contain costs for the current time step
and several forecasts for different points in time. Our
modified Dijkstra chooses the closest entry for the
point in time where a value is needed. This means,
at the first intersection (start of the route), the current
costs Y
t
will be considered. At the next intersection,
the forecast for the estimated arrival time t + ∆t will
be used, and so on (Fig. 2). Finally, an approximated
travel time for the whole route is computed.
Figure 2: Time dependant use of actual values and forecasts.
4.4 Distance Vector Routing (DVR)
As an alternative to the standard LSR protocol, DVR
has been considered. The DVR protocol main-
tains routing tables for each of the intersection’s ap-
proaches, updates them based on messages received
from neighbouring RCs and communicates changes
to its own neighbours. The protocol works as follows:
1) Initially, each intersection checks if it is directly
connected to prominent destinations (e.g. the main
hall). In case such a prominent destination is detected,
the RC creates new routing table entries for all ap-
proaching roads leading to that destination. Each en-
try contains the destination, the approaching road, the
proposed turning and the estimated travel time (based
on the delay caused by red lights plus the estimated
travel time to the destination). The travel time can
be estimated in a static way, derived from the length
and the speed limit of the connecting road, or dynam-
ically, based on the current traffic flow. 2) New or up-
dated entries are then sent upstream to neighbouring
RCs where matching routing table entries are updated
iteratively. At last, each recipient has the estimated
travel time from itself to prominent destinations. If
a destination is yet unknown, a new entry is created,
otherwise the existing entry is updated (the costs and
the proposed next turning are updated if the costs for
the received route are lower than the previous ones).
3) Finally, each RC knows the estimated fastest route
to each destination that is reachable from itself.
4.5 Temporal Distance Vector Routing
(TDVR)
TDVR tries to cover the time-dependant traffic con-
ditions for future time steps considering traffic flow
forecasts. DVR processes the network upstream,
starting at a destination. This process is not applicable
for TDVR. Each RC has to know the travel time from
an initial RC
0
to itself. This is necessary to determine
the point in time for which a traffic flow forecast is
computed (Fig. 2). To determine the arrival time of
a vehicle at RC
1
, the estimated travel time (see Sec-
tion 3) from RC
0
to RC
1
has to be calculated. RC
1
re-
ceives the request and estimates the turning’s delays
and travel times for outgoing sections to neighbour-
ing destinations for the point in time the vehicle is
estimated to arrive at RC
1
. Similar to DVR, RC
1
for-
VEHITS 2016 - International Conference on Vehicle Technology and Intelligent Transport Systems
182

wards the updated request to further RCs in its prox-
imity. Furthermore, it returns the discovered route
(from RC
0
to the found destination) and its estimated
travel time. RC
0
receives this information and updates
its routing tables. Its entries are therefore based on the
current traffic flow conditions and the respective traf-
fic flow forecasts.
4.6 Adaptation for Regional Routing
Broadcasting local traffic informations to other RCs
leads to high communicational overhead which raises
quadratic with the number of RCs. In the following,
m denotes the number of prominent destinations and n
represents the number of intersections in the network.
In the worst case, DVR has to send n messages per
destination, resulting in a communication complexity
of O(n ∗ m). LSR broadcasts the link states of an in-
tersection with a single message. As each controller
has to forward the data of each other RC at most once,
the communication complexity is O(n
2
).
To minimise this overhead, the protocols were ex-
tended based on the concept of the Border-Gateway-
Protocol (Tanenbaum, 2002), also known from the In-
ternet domain. The concept of the distinction between
intra- and inter-network routing was transferred to re-
gions of cities. RCs near to each other form a region.
RCs can be sorted into regions based on their relative
distance to each other, or manually via a configura-
tion file. Each RC can only belong to exactly one
region. If all its neighbours are in the same region, it
is an interior, otherwise an exterior node. Only exte-
rior nodes are allowed to communicate with exterior
nodes from other regions. Consequently, RCs have to
propagate less messages and the complexity for the
calculation of the shortest paths decreases. Fig. 3(b)
shows three regions: A, B and C with each 9 nodes
and 10 centroids (a centroid models a source/sink of
traffic). Dark dots are exterior, light dots represent in-
terior nodes. Lines between two nodes show the pos-
sibility to communicate with each other (i.e. the cor-
responding road segments are normally both-way).
5 EVALUATION
In the following, the evaluation scenarios and their
results are presented. The evaluation was done with
AIMSUN 8.0.9 (Barcelo and Casas, 2002), a pro-
fessional traffic modelling and simulation software
widely used by traffic experts. The simulations were
executed on an Intel Core i7 quad-core CPU with 2.6
GHz and 8 GB RAM.
5.1 Experimental Setup
The DRG system has been evaluated by comparing
OTC-controlled intersections with and without DRG
against a reference run with fixed-time signalisation.
The simulation was done with a Manhattan-style net-
work and a regional variant (Fig. 3), simulating mod-
erate traffic demands.
1
2
3
(a) 25 junctions and
20 destinations.
(b) 3 connected regions.
Figure 3: Simulated networks (Ellipses show incident loca-
tions).
The first network consists of a 5-on-5 grid of 25
intersections and 20 prominent destinations at the bor-
der of the network (Fig. 3(a)). Every hour, 15 vehi-
cles travel from every origin to every destination, re-
sulting in 5700 vehicles per hour traversing the net-
work. To simulate disturbed traffic conditions, we
also investigated road blockages. The congested sce-
nario simulates disturbed traffic flows through tempo-
rary blockages of roads, resulting in traffic conges-
tion. The locations of these incidents are marked with
circles. Three streets were each blocked for 40 min-
utes, forcing vehicles to take alternative routes. Inci-
dent 1 starts at simulation minute 15, incident 2 at 45
minutes and incident 3 at 75 minutes. Ten vehicles
per hour travel from every origin to every destination.
In total, 3800 vehicles per hour traverse the network.
The simulation duration was 2 hours and 15 minutes.
The second network (Fig. 3(b)) allows for an
evaluation of the regional routing protocols. Three
equally shaped 3-on-3 manhattan-style regions with
9 intersections are each connected by one or two
streets. The simulation time spanned 2 hours. For
every origin-destination pair, 8 vehicles per hour are
generated, resulting in 6048 cars per hour traversing
the network.
The routing protocols are executed every 2 min-
utes. The routing compliance is set to 10% (low),
40% (medium) and 70% (high). Cars not following
the DRG proposals, use the static shortest path to their
destination. The traffic flow forecasts were created by
the following methods: Exponential Smoothing, Dou-
ble Exponential Smoothing, Double Smoothing Aver-
age, Moving Average and Kalman Filter. Their fore-
casts were combined with the simple average. The
Forecast-augmented Route Guidance in Urban Traffic Networks based on Infrastructure Observations
183

protocols have been evaluated with respect to the ve-
hicles’ mean delay and the travel time averaged over
all trips. The fuel consumption and pollution emis-
sions of the simulated vehicles have been investi-
gated to estimate the environmental impact of DRG.
The emissions have been determined with the help of
AIMSUN’s environmental model, configured accord-
ing to (Panis et al., 2006).
5.2 Evaluation Results
The following section presents the results of the eval-
uation for the regular and the congested scenario in
both networks executed as described before. As the
data is gathered when the simulated vehicles have
completed their trip, the effects of the incidents show
up in the figure with an approximate delay of 10 min-
utes after the incidents occurrence.
5.2.1 Manhattan Scenario
Fig. 4 indicates that OTC with and without routing is
able to drastically reduce the overall delay compared
to fixed-time signalisation. The figure shows the av-
erage travel time in seconds per kilometre for a simu-
lated scenario of 2 hours. The compliance rate was set
to 70%. The mean delay is given in brackets behind
the protocol’s name.
130
140
150
160
170
180
190
200
00:15 00:30 00:45 01:00 01:15 01:30 01:45 02:00 02:15
Travel time (s/km)
Time (min.)
Fixed-time (180.20 s)
OTC (148.64 s)
LSR (148.14 s)
Temporal LSR (148.64 s)
DVR (148.20 s)
Temporal DVR (148.76 s)
Figure 4: Travel times for the regular Manhattan scenario.
The first 15 minutes of the simulation represent
the warm-up time, where OTC gathers data to cali-
brate the forecast methods. Each observer/controller
needs to populate its initial empty database of map-
pings between optimised signal plans and monitored
traffic demands. Therefore, the overall performance
is identical. Afterwards, it can be seen that the static
fixed-time signal plans are not able to reduce the neg-
ative impacts of the traffic demands. Table 1 presents
the average travel times over all trips, the average fuel
consumption and the average CO
2
emissions per ve-
hicle for the reference run and the proactive routing
protocols with different compliance rates. Reductions
compared to the reference run are given in brackets.
Not only is the travel time reduced significantly (17%)
in comparison to the reference run, but so are the fuel
consumption (4% to 6%) and the pollution emissions
(2% to 3.3%). These results must be interpreted with
caution. During undisturbed conditions, an improved
signalisation alone is enough to guarantee a reduction
of queues. OTC without routing already reduces the
travel time to 227.6 seconds.
In contrast to the undisturbed scenario, the con-
gested scenario clearly shows the benefit of DRG dur-
ing incidents. Table 2 summarises the evaluation re-
sults. The routing mechanism gives drivers indica-
tions how to avoid congested areas. It reduces the
average travel time by 10% (TLSR) to 11% (TDVR)
(Fig. 5) for a compliance rate of 70%.
100
150
200
250
300
350
400
450
00:15 00:30 00:45 01:00 01:15 01:30 01:45 02:00 02:15
Travel time (s/km)
Time (min.)
Fixed-time (216.6 s)
LSR (194.4 s)
Temporal LSR (192.1 s)
DVR (191.3 s)
Temporal DVR (189.4 s)
Figure 5: Travel times for the congested scenario.
The best performance was delivered by TDVR
achieving the highest travel time reduction. At 1:45,
during a severe incident, TDVR reduces the average
travel time to 282 seconds per kilometre (33% im-
provement over the reference run with 421 seconds
and 30% improvement over OTC without routing with
408 seconds). This indicates that TDVR correctly
forecasted the upcoming congestion due to the inci-
dent, preventing more severe disturbances. This re-
sembles an improvement of 4.0% compared to OTC
without routing with an average trip travel time of 320
seconds. The decrease in travel time is achieved by
re-routing drivers over alternative routes, which can
be longer than the planned one. Therefore, the use of
routing protocols sometimes leads to slightly higher
fuel consumption and CO
2
emissions.
Fig. 6 and Fig. 7 present the average travel times
evaluated for several compliance rates. A higher com-
pliance rate means that drivers are more likely to fol-
low the given routing proposals. The figure’s horizon-
tal axis shows the simulation time and the vertical axis
shows the average travel time in seconds per kilome-
tre. Our results suggest that the benefit of all routing
protocols increases for higher compliance rates.
VEHITS 2016 - International Conference on Vehicle Technology and Intelligent Transport Systems
184

Table 1: Results for the regular scenario with TDVR and TLSR.
Fixed-time TDVR TLSR
0.7 0.4 0.1 0.7 0.4 0.1
Travel time [s/veh] 275 228 (17.1%) 228 (17.1%) 228 (17.1%) 227 (17.5%) 230 (16.4%) 227 (17.5%)
Fuel [l/100km] 15.1 14.5 (4.0%) 14.4 (4.6%) 14.2 (5.8%) 14.5 (4.0%) 14.6 (3.4%) 14.2 (5.8%)
CO
2
[g/veh] 518.5 506.0 (2.4%) 504.7 (2.6%) 501.4 (3.3%) 504.7 (2.7%) 508.3 (2.0%) 501.6 (3.3%)
Table 2: Results for the congested scenario with TDVR and TLSR.
Fixed-time TDVR TLSR
0.7 0.4 0.1 0.7 0.4 0.1
Travel time [s/veh] 345 306 (11.3%) 310 (10.1%) 320 (7.2%) 310 (10.1%) 313 (9.2%) 335 (2.9%)
Fuel [l/100km] 16.6 16.4 (1.2%) 16.3 (1.8%) 16.6 (0.0%) 16.6 (0.0%) 16.4 (1.2%) 17.0 (-2.4%)
CO
2
[g/veh] 549.6 543.6 (1.1%) 545.7 (0.7%) 551.8 (-0.4%) 547.2 (0.4%) 547.0 (0.5%) 562.3 (-2.3%)
100
150
200
250
300
350
400
450
00:15 00:30 00:45 01:00 01:15 01:30 01:45 02:00 02:15
Travel time (s/km)
Time (min.)
DVR 0.7 (191.31 s)
DVR 0.4 (193.73 s)
DVR 0.1 (200.47 s)
TDVR 0.7 (189.44 s)
TDVR 0.4 (190.32 s)
TDVR 0.1 (195.33 s)
Figure 6: Compliance rates for the congested Manhattan
scenario with DVR.
100
150
200
250
300
350
400
450
00:15 00:30 00:45 01:00 01:15 01:30 01:45 02:00 02:15
Travel time (s/km)
Time (min.)
LSR 0.7 (194.39 s)
LSR 0.4 (194.54 s)
LSR 0.1 (194.75 s)
TLSR 0.7 (192.13 s)
TLSR 0.4 (192.55 s)
TLSR 0.1 (205.29 s)
Figure 7: Compliance rates for the congested Manhattan
scenario with LSR.
5.2.2 Regional Scenario
Table 3 depicts the comparison of communicational
and computational effort between regional protocols
and the basic variants. The table shows the number
of messages each TLC has to send during one iter-
ation of the executed routing protocol and the aver-
age runtime in seconds of a complete protocol run.
The results clearly depict that the regional protocols
decrease the number of messages and the computa-
tional overhead. The reference run has no communi-
cation between TLCs and therefore no sent messages.
The anticipatory protocols need more computational
power to compute the forecasts for all sections and
turnings of the network, leading to longer runtime.
As Table 4 indicates, the regional protocols do not
or only to a slight extend increase the average travel
time. The simplification of the communication due to
the regional aggregation of RCs offers equally good
route recommendations while reducing the communi-
cation and computational effort.
6 CONCLUSION
This paper presented two novel time-aware, antici-
patory routing protocols (TLSR and TDVR) for dy-
namic, proactive traffic guidance in urban road net-
works. The well-known Internet protocols Distance
Vector Routing and Link State Routing have been
extended, utilising traffic flow forecasts to compute
the best routes through a road network. The routes
are determined by a self-organised approach, extend-
ing parametrisable traffic light controllers. The route
recommendations are visualised by Variable Message
Signs at each intersection, guiding drivers from inter-
section to intersection on a next-hop basis. The pro-
tocols were evaluated with compliance rates of 10%,
40% and 70%. A simulation study investigated the
benefits of these protocols under disturbed and undis-
turbed conditions in two different networks. Our find-
ings strongly support the view that the consideration
of traffic flow forecasts leads to a decrease in system-
wide travel times for urban vehicular traffic. Conse-
quently, this leads to a reduction in pollution emis-
sions and fuel consumption. In general, this counts
especially for disturbed and congested conditions, but
to a limited extend also for medium and low traffic
saturations. The benefit increases for higher compli-
ance rates. During undisturbed conditions, an im-
proved signalisation alone is enough to guarantee a
reduction of queues. The dynamic route guidance im-
proves the network’s robustness by guiding road users
on alternative routes around blocked areas. The Tem-
poral Distance Vector Routing protocol showed to be
the most beneficial approach, not only for congested
Forecast-augmented Route Guidance in Urban Traffic Networks based on Infrastructure Observations
185
Table 3: Comparison of regional and basic protocols in terms of sent messages and computational time.
Fixed-time DVR Reg. DVR TDVR Reg. TDVR LSR Reg. LSR TLSR Reg. TLSR
Messages (#/RC/iter.) 0 1437 133 1463 133 35 25 35 24
Runtime (s) 10 360 105 1400 400 280 270 330 370
Table 4: Travel time of regional and basic protocols for the regional scenario.
DVR Reg. DVR TDVR Reg. TDVR LSR Reg. LSR TLSR Reg. TLSR
Undisturbed: Travel time [s/veh] 119.83 119.27 119.49 119.30 119.73 119.76 119.39 121.68
Disturbed: Travel time [s/veh] 127.83 128.44 128.41 127.15 128.69 129.14 129.00 130.18
but also during free flow conditions. The communi-
cational overhead and the computational costs can be
reduced by partitioning a larger network into smaller
sub-networks via the Border-Gateway-Protocol.
REFERENCES
Barcelo, J. and Casas, J. (2002). Dynamic network simu-
lation with AIMSUN. In Proc. of the Int. Symp. on
Transp. Simul., pages 1–25. Kluwer.
Claes, R., Holvoet, T., and Weyns, D. (2011). A decen-
tralized approach for anticipatory vehicle routing us-
ing delegate multiagent systems. IEEE Trans. on Int.
Transp. Systems, 12:364–373.
Dijkstra, E. W. (1959). A note on two problems in connex-
ion with graphs. Numerische Mathematik, 1(1):269–
271.
Dong, J., Mahmassani, H., and Lu, C.-C. (2006). How reli-
able is this route: Predictive travel time and reliability
for anticipatory traveler information systems. Journal
of the Transp. Research Board, (1980):117–125.
Dong, W. (2011). An overview of in-vehicle route guidance
system. 34th Australasian Transp. Research Forum
(ATRF 2011), Adelaide, Australia, 28-30 Sept. 2011.
Emmerink, R. H. M., Nijkamp, P., and Rietveld, P. (1996).
Variable message signs and radio traffic informa-
tion, an integrated empirical analysis of drivers route
choice behaviour. In Transp. Research Part A: Policy
and Practice, volume 30, pages 135–153.
Erke, A., Sagberg, F., and Hagman, R. (2007). Effects of
route guidance variable message signs (vms) on driver
behaviour. Transp. Research Part F: Traffic Psychol-
ogy and Behaviour, 10(6):447 – 457.
F.S. Zuurbier, J. v. L. and van Zuylen, H. (2006). Com-
parison study of decentralized feedback strategies for
route guidance purposes. In Proc. of the 9th TRAIL
Congress, pages 1–15.
Fu, L. (2001). An adaptive routing algorithm for in-vehicle
route guidance systems with real-time information.
Transp. Research Part B, 35(8):749–765.
Hart, P. E., Nilsson, N. J., and Raphael, B. (1968). A formal
basis for the heuristic determination of minimum cost
paths. IEEE Trans. on Systems Science and Cybernet-
ics, 4(2):100–107.
Horst F. Wedde et al. (2007). Highly Dynamic and Adap-
tive Traffic Congestion Avoidance in Real-Time In-
spired by Honey Bee Behavior. In Mobilit
¨
at und
Echtzeit – Fachtagung der GI-Fachgruppe Echtzeit-
systeme, pages 21–31. Springer.
Hyndman, R. J. and Koehler, A. B. (2006). Another look at
measures of forecast accuracy. International Journal
of Forecasting, pages 679–688.
Kaplan, E. (2005). Understanding GPS - Principles and
applications. Artech House, 2nd edition edition.
Nannicini, G., Delling, D., Schultes, D., and Liberti, L.
(2012). Bidirectional a* search on time-dependent
road networks. Netw., 59(2):240–251.
Panis, L. I., Broekx, S., and Liu, R. (2006). Modelling in-
stantaneous traffic emission and the influence of traf-
fic speed limits. Science of The Total Environment,
371(13):270 – 285.
Parkany, E. and Xie, P. C. (2005). A complete review of in-
cident detection algorithms & their deployment: What
works and what doesn’t. Technical report, Fall River,
MA: New England Transp. Consortium.
Prothmann, H., Tomforde, S., Branke, J., H
¨
ahner, J.,
M
¨
uller-Schloer, C., and Schmeck, H. (2011). Organic
Traffic Control. In Organic Computing – A Paradigm
Shift for Complex Systems, chapter 5.1, pages 431–
446. Birkh
¨
auser.
Prothmann, H., Tomforde, S., Lyda, J., Branke, J., H
¨
ahner,
J., M
¨
uller-Schloer, C., and Schmeck, H. (2012). Self-
organised routing for road networks. In Proc. of the
6. Int. Workshop on Self-Organizing Systems, LNCS
7166, pages 48–59. Springer.
Schmitt, E. J. and Jula, H. (2006). Vehicle route guidance
systems: classification and comparison. 2006 IEEE
Intelligent Transp. Systems Conference, 1:242–247.
Sommer, M., Tomforde, S., H
¨
ahner, J., and Auer, D. (2015).
Learning a dynamic re-combination strategy of fore-
cast techniques at runtime. In Proc. of IEEE Int. Conf.
on Autonomic Computing (ICAC), pages 261–266.
Tanenbaum, A. S. (2002). Computer Networks. Pearson,
4th edition.
Tomforde, S., Prothmann, H., Branke, J., H
¨
ahner, J.,
M
¨
uller-Schloer, C., and Schmeck, H. (2010). Pos-
sibilities and limitations of decentralised traffic con-
trol systems. In IEEE World Congress on Comp. Int.,
pages 3298–3306. IEEE.
Webster, F. V. (1958). Traffic signal settings. Road Research
Technical Paper No. 39, Road Research Laboratory,
England, HMSO.
Wunderlich, K. E., Kaufman, D. E., and Smith, R. L.
(2000). Link travel time prediction for decentralized
route guidance architectures. IEEE Transactions on
Intelligent Transp. Systems, 1(1):4–14.
VEHITS 2016 - International Conference on Vehicle Technology and Intelligent Transport Systems
186
