
UML Associations
Reducing the Gap in Test Coverage between Model and Code
Anders Eriksson
1,2
and Birgitta Lindstr
¨
om
1
1
School of Informatics, University of Sk
¨
ovde, Sk
¨
ovde, Sweden
2
Saab Aeronautics, Link
¨
oping, Sweden
Keywords:
Model Coverage, Code Coverage, UML Association, fUML, ALF, MDA, xtUML.
Abstract:
This paper addresses the overall problem of estimating the quality of a test suite when testing is performed at a
platform-independent level, using executable UML models. The problem is that the test suite is often required
to fulfill structural code coverage criteria. In the avionics domain it is usually required that the tests achieve
100% coverage according to logic-based coverage criteria. Such criteria are less effective when applied to
executable UML models than when they are applied to code because the action code found in such models
contains conditions in navigation and loops that are not explicit and therefore not captured by logic-based
coverage criteria. We present two new coverage criteria for executable UML models, and we use an industrial
application from the avionics domain to show that these two criteria should be combined with a logic-based
criterion when testing the executable UML model. As long as the coverage is less than 100% at the model
level, there is no point in running the tests at the code level since all functionality of the model is not yet tested,
and this is necessary to achieve 100% coverage at the code level.
1 INTRODUCTION
As software systems become more complex and in-
terconnected, the act of software design and devel-
opment becomes a great challenge. Model-based de-
velopment where the software is designed in a mod-
eling language at a platform-independent level and
then transformed to an executable implementation is
a powerful methodology to help engineers to better
understand and develop such complex systems.
With the introduction of executable modeling lan-
guages such as xtUML (Mellor and Balcer, 2002) and
fUML (OMG, 2013) it has become possible to per-
form testing at a platform-independent model level.
The testing criteria that the software sometimes are re-
quired to fulfill might however be much less effective
when applied to models than they are when applied
to code. Typical examples are the logic-based criteria
that are used in the avionics and automotive domain
(Eriksson et al., 2012). As a consequence, a developer
might overestimate the given coverage for a test suite
that is executed on the model and functionality might
therefore, remain untested.
The fact that test criteria can be less effective
when applied to models than they are if they are ap-
plied to code, calls for new criteria that fill in the gap
and cover the functionality that traditional logic-based
criteria miss when applied to executable platform-
independent models. This paper presents two such
criteria, which focus on association navigation and it-
erations in executable UML models.
The paper is organized as follows, Section 2 gives
the necessary background to logic-based coverage cri-
teria and UML associations. Section 3 defines the test
criteria we propose for executable UML models and
discusses their correlation to logic-based criteria, Sec-
tion 4 describes the industrial case study and its re-
sults. Finally, Section 5 presents conclusions and dis-
cusses related work, threats to validity and our sug-
gestions for future work.
2 BACKGROUND
This section presents the necessary background and
introduces the concepts that we use in this paper. Sec-
tion 2.1 describes logic-based testing criteria and how
these are typically used in a model-driven develop-
ment environment. Section 2.2 describes UML with a
special focus on the associations that are navigated in
executable UML models.
Eriksson, A. and Lindström, B.
UML Associations - Reducing the Gap in Test Coverage between Model and Code.
DOI: 10.5220/0005745205890599
In Proceedings of the 4th International Conference on Model-Driven Engineering and Software Development (MODELSWARD 2016), pages 589-599
ISBN: 978-989-758-168-7
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
589

2.1 Software Testing and Logic-based
Criteria
There are many test coverage criteria defined for soft-
ware (Ammann and Offutt, 2008; Zhu et al., 1997). A
test coverage criterion defines a set of requirements
that a test suite must fulfill, i.e., the test requirements.
For example, to achieve 100% statement coverage,
each statement must be executed by at least one of
the tests in the test suite. In this case, statement cov-
erage is the test criterion and each statement has its
specific test requirement, to execute it.
Logic-based test criteria focus on covering pred-
icate and clauses that are found in software artifacts
such as models or source code Decision coverage re-
quires that each predicate is evaluated to both true and
false at least once by the test suite. Multiple Condi-
tion Decision Coverage (MCDC) has the additional
requirement that each clause in each predicate evalu-
ates to both true and false while the clause is active
(Chilenski, 2001). A clause is active if changing the
truth assignment of the clause changes the truth as-
signment of the predicate. For example, to achieve
MCDC coverage for the predicate (A & B), clause A
should be evaluated to true and false while B eval-
uates to true since clause A is active when B is true.
Similarly, B should be evaluated to both true and false
while A is true. Some test requirements for MCDC
are redundant and for the given example (A & B),
MCDC gives three test requirements while decision
coverage only gives two.
Logic-based coverage criteria exercise specific
evaluations of predicates and clauses but such crite-
ria are not very well suited to test loops. Both MCDC
and decision coverage requires that a loop condition
is evaluated to both true and false. If the loop con-
dition contains boolean operators, MCDC will re-
quire more than two different truth assignments as
discussed above. This is however, a poor guarantee
for proper testing of a loop since this evaluation can
be done by a single test that iterates through the loop
a couple of times with different truth assignments to
the individual clauses before finally exiting the loop.
From a testing perspective, it is reasonable to have at
least one test that enters the loop and another test that
does not. In addition to this, it is sometimes required
that a loop is executed exactly once and more than
once. Covering loops is addressed by different graph-
based coverage criteria such as edge-pair, round-trip
and prime-path coverage (Chow, 1978; Binder, 2000;
White and Wiszniewski, 1991; Ammann and Offutt,
2008).
Coverage criteria can be used to generate tests,
which is usually what is assumed by researchers.
However, in industry the criteria are often used as a
metric to evaluate the quality of a given test suite de-
rived from software requirements. Our work is con-
ducted in an industrial setting where development is
model driven, following the principles of a model-
driven architecture (MDA) (Mellor et al., 2004). The
design model is automatically transformed by a model
compiler to code (e.g., C++) and any further modifi-
cations to the software has to be done at the model
level. Manual modification of the source code is not
allowed. Test cases are created based on software re-
quirements and the coverage criterion is merely used
as a metric to estimate whether the test suite fully
exercise the structure of the software. In case there
are structural elements in the software that the test
suite does not cover, then there is some functionality
that is still not tested. In our model-driven develop-
ment context, this can mean one of three things: (i)
there is a functional requirement for which there is
no test case, (ii) there is a functional requirement that
has not yet been specified, or (iii) there is extra (un-
intended) functionality in the software, which has to
be removed. It is often hard to determine which of
these three possible situations that is the actual case.
Logic-based coverage criteria are often used like this
in the aeronautic domain, i.e., as a metric to assess
the quality of test suites derived from the software re-
quirements, DO-178C (RTCA, 2011a).
With the use of executable models in model-based
development, developers have an excellent opportu-
nity to test and analyze the software in an early stage
of development, long before the model is transformed
to code. However, unless the model is transformed to
code and tested at that level, the developer has little
knowledge of what the achieved code coverage is and
hence, whether the test suite is good enough. The rea-
son is that the structure of a design model and the re-
sulting code might be quite different. Kirner (Kirner,
2009) identifies some serious transformation issues
concerning abstraction and parametrization that could
affect the predicates and clauses. The consequence
is that the effect of applying a logic-based coverage
criterion to the design model is likely to be less ef-
fective than when the same criterion is applied to the
code since the code might contain a different set of
predicates and clauses to be covered than the model.
Moreover, if there are predicates and clauses in the
code, which are not covered by the tests, then there is
functionality that has not been tested when executing
the tests at the platform-independent design level.
Having to transform the model to code in order to
estimate the quality of a test suite is problematic for
several reasons. One of the reasons is that the trans-
formation to code might be time consuming but the
MODELSWARD 2016 - 4th International Conference on Model-Driven Engineering and Software Development
590

main reason is that the developer should ideally be al-
lowed to perform analysis at the same level he or she
develops the software and the test suite, since iterating
between abstraction levels can be hard. We address
the overall problem of measuring the quality of a test
suite, which is required to fulfill a logic-based code
coverage criterion, without having to first transform
the model to code.
2.2 UML and Associations
There are empirical evidence available showing that
class diagram, of all the diagram types provided by
UML, is the most widely used in practice by the in-
dustry which uses UML (Hutchinson et al., 2011). A
class diagram is a static diagram that captures and ab-
stracts the structure within a problem domain, and
consists of several classes connected with relation-
ships. In UML, there are different types of relation-
ships such as associations, generalizations and de-
pendencies. In this study we focus on the associa-
tion, which is one of the most powerful constructions
in UML and is often misunderstood (Selic, 2012).
Moreover, it is the association relationship that has
shown to be a source to the differences between the
sets of predicates and clauses in model and code
(Eriksson et al., 2012).
To capture the dynamic behavior within a prob-
lem domain, state machine diagrams and activity di-
agrams are widely used (Hutchinson et al., 2011). In
contrast to the structural model, which specifies con-
straints for allowable configuration of instances, the
behavioral model specifies how the state of instances
changes over time. A state-machine can be used for
specifying the overall life-cycle of an active class,
where each state is associated with an activity which
coordinates the execution of actions. An instance of a
class is called an object, and an instance of an associ-
ation is called a link.
Many model-based testing techniques do not deal
with actions in behavioral models (Planas et al.,
2009). These actions represent the primitives used
in behavior models, which in addition can be used
for building high-level constructs in an action lan-
guage (OMG, 2011; Mellor and Balcer, 2002). The
main effect of including actions in behavior models is
that instances, e.g., objects and links, are created and
destroyed during run-time, which makes the overall
system state change continuously over time. Previ-
ous experimental studies (Eriksson et al., 2012; Eriks-
son et al., 2013) have highlighted that there are im-
plicit predicates in association navigation, sequences
of ReadLink actions expressed in an action language
and that these implicit predicates are not guaranteed
to be covered by any logic-based coverage criteria.
The implicit predicates are derived from the con-
strained rules specified on the class diagram. This
result shows that current logic-based coverage cri-
teria are insufficient for testing the behavior of the
platform-independent and executable models. The re-
sult can also be interpreted as there is little benefit
in measuring coverage at the code level before all the
implicit predicates as well as all the explicit predicates
are covered in the behavioral model at a platform-
independent level, since less than 100% coverage of
these at the model level means that there will be less
than 100% coverage at the code level.
The characterization of an association in UML is
qualified by several elements:
• Identity: This makes the association uniquely
identifiable within the class diagram.
• Multiplicity: This defines the number of objects
of the participating classes at some point in time.
Such that one object at one end connects with
“one” or “many” object(s) at the other end. De-
noted as [1..1] and [1..*] at each end of the asso-
ciation in the class diagram.
• Conditionality: This defines if the participation is
conditional, i.e., at some point in time there might
not be any participating objects. Such that one
object at one end connects with “zero or one” or
“zero or many” object(s) at the other end. De-
noted as [0..1] and [0..*] at each end of the asso-
ciation in the class diagram. We refer to this as
different configurations.
• Role: This describes how the objects logically
participates in the association, and there is a role
description for each end of the association.
ShoppingCart
+cartID : arbitrary_id
Order
+orderID : arbitrary_id
Customer
+email : InternetemailAddress
R2
R3
places
is placed by
1..*
0..1
is a purchase
of selections
1..1
0..1
selections are
purchased in
Role
Multiplicity (one)
and Conditional
Identity
Figure 1: Part of the Online Bookstore Domain class dia-
gram,(Mellor and Balcer, 2002).
In the UML standard (OMG, 2011), all the el-
ements for an UML association is completely de-
scribed. In our work, associations are restricted to
binary associations, and generalizations which are
noted as disjoint and complete as described in (Mel-
lor and Balcer, 2002). In Figure 1, is an excerpt of
UML Associations - Reducing the Gap in Test Coverage between Model and Code
591
a class diagram given by Mellor and Balcer (Mellor
and Balcer, 2002) shown with the qualified elements
for an association pointed by the dashed arrows in the
figure.
3 TEST CRITERIA
This Section presents two coverage criteria that are
meant to be used in combination with a logic-based
coverage criteria as a metric for test coverage when
testing executable UML models. The two new crite-
ria together cover the implicit predicates that logic-
based criteria miss. Section 3.1 defines a criterion
that targets navigation and discusses its relation to
logic-based criteria. Section 3.2 defines a criterion
that targets iterations and discusses the relation be-
tween our two proposed criteria.
3.1 All Navigation Criterion
A navigation step is a directed navigation of an
association identified by its identity. A navigation
step starts at one end of an association with the
navigation direction towards the other end specified
by its role description. This follows the look-across
semantics of how to read relationships, to which
UML adheres (Chen, 1976). A navigation step s is
conditional if the association navigated is conditional
in the direction of the navigation, and we say that the
predicate Empty(s) evaluates to true iff the collection
of participating objects at the end of s is empty.
An association path is a contiguous sequence of
one or more navigation steps, which specifies the
path from a start class to a destination class.
A selection query is an expression, which when
evaluated read the links for an association path in
order to identify the current set of objects that are
related to an object or set of objects at some point in
time.
Let Q be the set of selection queries. For each se-
lection query q ∈ Q, let A
q
be the association path tra-
versed in response to q and let C
q
be the set of condi-
tional navigation steps in A
q
. Finally let c
i
∈ C
q
be the
i
th
conditional navigation step in A
q
. A conditional
navigation step c
i
determines q iff the set of objects
returned upon evaluation of q differs for Empty(c
i
)
and ¬Empty(c
i
).
Definition 1 All Navigation (ANAV): For each query
q ∈ Q and each conditional navigation step c
i
∈ C
q
,
choose all navigation steps c
j
∈ C
q
, where j 6= i so
that c
i
determines q. For each such configuration,
ANAV has two test requirements, Empty(c
i
) and
¬Empty(c
i
).
3.1.1 Relation to Logic-based Criteria
This section focuses on the correlation between
our proposed criterion ANAV and the logic-based
criteria. We show a set of motivating examples,
which illustrate the need to combine logic-based
criteria with ANAV and discuss the overlap between
them. The overlap is not straight-forward since
the test requirements come from different sources.
Logic-based test criteria gather the test requirements
from predicate and clauses found in conditional state-
ments, e.g., in if-statements, while ANAV gather the
test requirements from selection queries. Still, when
it comes to the tested configurations, we can see that
there is an overlap in what the criteria guarantee. A
select query, including conditional navigation step(s)
in an action language such as OAL
1
or ALF (OMG,
2013) is typically followed by an if-statement, which
checks that the resulting object or set of objects is
not empty before further processing. Consider the
following action code in OAL:
1 select one Customer related by
Order->Customer[R3];
2 if (not
empty Customer)
3 <Statements>
4 end if;
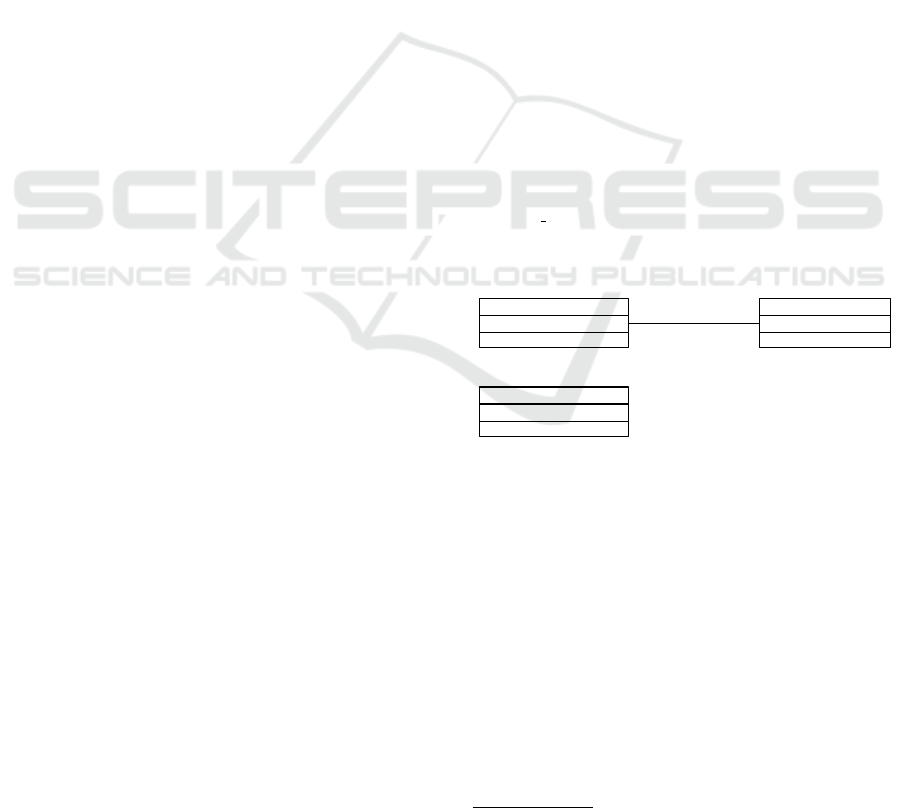
:Order
:Customer
:R3
places
is placed by
:Order
(a)¬Empty(R3)
Empty(R3)
(b)
Figure 2: Valid configurations of instances in some point in
time.
There are two possible configurations for this
piece of action code. ¬Empty(R3) and Empty(R3)
as shown in Figures 2a and 2b. ANAV gives two test
requirements based on the instruction on line 1, while
a logic-based criteria gives two test requirements
based on the predicate on line 2. The predicate on
line 2 has a single clause and hence, will only give
two test requirements (true and false) independent
on which logic-based criteria we apply. The above
action code is an example where the overlap between
the two criteria ANAV and Predicate is 100%. Inde-
pendent of whether we apply ANAV on line 1 or a
1
http://www.xtuml.org
MODELSWARD 2016 - 4th International Conference on Model-Driven Engineering and Software Development
592
logic-based criterion on line 2, both configurations in
Figures 2a and 2b will be covered. The same goes for
all configurations where there is only one conditional
navigation step. Let us consider action code for a
configuration with more than one conditional step:
1 select one Customer related by
Cart->Order[R2]->Customer[R3];
2 if (not empty Customer)
3 <Statements>
4 end if;
:ShoppingCart
:Order :Customer
:R2
is placed by
is a purchase
of selections
selections are
purchased in
places
R3
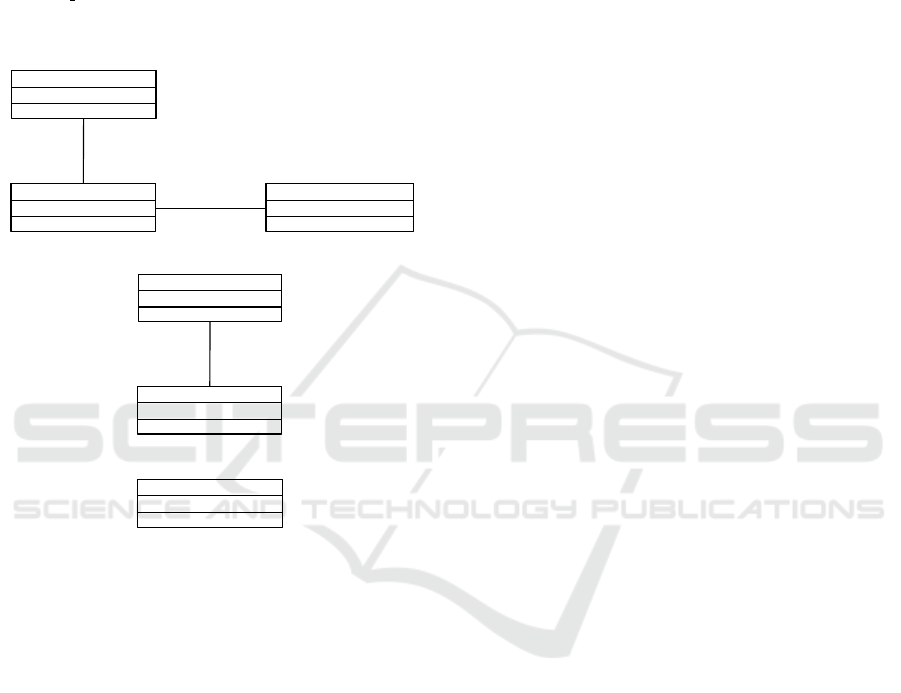
(a) ¬Empty(R2)∧¬Empty(R3)
:ShoppingCart
:Order
:R2
is a purchase
of selections
selections are
purchased in
(b) ¬Empty(R2)∧Empty(R3)
:ShoppingCart
(c) Empty(R2)∧Empty(R3)
Figure 3: Valid configurations of instances in some point in
time.
A logic-based test criterion will still give two test
requirements for this code. However, these two test
requirements will in this case, not be sufficient to
cover all configurations. There are three possible con-
figurations for this code as shown in Figures 3(a), 3(b)
and 3(c). The logic-based criteria give a guarantee to
cover configuration 3(c) and one of the others but not
all three. In contrast, ANAV will give four test re-
quirements (of which one is redundant) and guaran-
tees coverage of all three configurations. Hence, this
is an example that illustrates that logic-based test cri-
teria do not subsume ANAV.
Let us finally rule out the possibility that ANAV
subsumes any of the logic-based criteria. This is sim-
ply not possible due to the fact that ANAV focuses on
the navigation via the association paths only and there
can be other constructs in the action code that con-
tain predicates. In our two illustrating examples, the
if-statements both check that the object set returned
by the queries are not empty. There can of course
be other conditional statements in an action code. In
such cases, a logic-based criterion will give a set of
test requirements while ANAV will not.
The above examples show that ANAV and logic-
based criteria should be combined in order to get suf-
ficient coverage of the potential configurations when
testing the platform-independent behavioral model.
3.2 Iteration Criterion
Loops should be executed at least by a test that en-
ters the loop and by a test that does not enter the loop,
in order to be properly tested. Neither the proposed
ANAV nor the logic-based coverage criteria guarantee
sufficient coverage for all loops that can be found in
executable models. A single test can fulfill the logic-
based criteria for a predicate in a loop condition by
iterating through the loop fulfilling one test require-
ment for each iteration. Hence, logic-based coverage
criteria do not guarantee that there will be a test that
reaches the loop and does not enter it. Moreover, there
are loops in the action code where the loop condition
is implicit, i.e., there is no predicate to be covered by
logic-based criteria. Such loops iterates over a set of
objects that are returned by a query but the stopping
criterion is not explicitly stated as a predicate.
Hence, a logic-based coverage criterion would
not give any test requirement at all for such loop.
Such implicit conditions will become explicit as
predicates when the model is transformed to source
code. Consider the following action code in OAL:
1 select many Orders related by Carts->Order[R2];
2 for each Order in Orders
3 <Statements>
4 end for;
The above set-iteration statement has no explicit
stopping criteria for the loop. Hence, a logic-based
criterion would not guarantee that this loop is covered
by any test.
Definition 2 All Iteration (ITER): For each object
set-iteration statement, ITER has two test require-
ments: The test suite must contain at least one test
that executes the loop zero times and one test that ex-
ecutes the loop at least one time.
3.2.1 Relation to ANAV
When it comes to loops in action code, there is an
overlap in terms of what coverage ANAV and ITER
guarantee. Consider this action code again:
UML Associations - Reducing the Gap in Test Coverage between Model and Code
593

1 select many Orders related by Carts->Order[R2];
2 for each Order in Orders
3 <Statements>
4 end for;
The navigation step traversing R2 is conditional
[0..1] and therefore, ANAV applies to line 1 and
ITER applies to line 2 but ANAV will ensure that
there is one test returning an empty set of objects and
another test returning a set that contains at least one
object for this query. In the first case, the test will not
enter the loop and in the second case the loop will
be executed at least once. Hence, although ANAV
focuses on covering navigation and ITER focuses on
covering the implicit loop conditions, we do have an
overlap in terms of loop coverage. Let us consider
another example.
1 select many Carts related by
Orders->ShoppingCart[R2];
2 for each Cart in Carts
3 <Statements>
4 end for;
In this case, the navigation step traversing R2 is
unconditional in the direction of navigation [1..1] and
therefore, the set of conditional navigation steps C
q
would be empty. Hence, ANAV would not generate
any test requirement for the query on line 1 and it
is therefore, only ITER that gives any guarantee for
loop coverage. For this example, ITER will only
give one test requirement, to execute the loop at least
once. The second test requirement (to execute the
loop zero times) will be discarded as infeasible since
there will be at least one element in the set of objects
returned by the query. Let us consider a last example.
1 select many Carts from instances of ShoppingCart;
2 for each Cart in Carts
3 <Statements>
4 end for;
ANAV is not applicable in this case, because there
is no navigation. The selection is done directly from
the extent of objects for the class ShoppingCart. As in
the previous example, it is only ITER that gives any
guarantee for loop coverage. ITER will give two test
requirements, one to not enter the loop at line 2 (en-
suring there is a test returning an empty set of objects)
and another to enter the loop (ensuring there is a test
returning a set that contains at least one object for this
selection).
4 EVALUATION
The work presented in this paper is conducted in an
industrial context where we have used six applica-
tions from the avionics domain. Several of these are
from an updated version of the Gripen fighter
2
. Ta-
ble 1 shows a summary of the six applications, which
all are modeled in xtUML. The number of classes
specified in the class diagrams for each application is
represented by column Classes in Table 1. Columns
States and Operations show the number of places in
the applications where their behavior is specified in
the object action language (OAL
1
). The six applica-
tions have been used in a previous study to investi-
gate the transformation impact on the number of test
requirements for logic-based criteria.
Table 1: Summary of experimental subjects.
Action Source
Applications Classes States Operations
A1 61 117 193
A2 66 117 216
A3 12 15 46
A4 18 15 34
A5 36 81 140
A6 444 2 633
Total 637 347 1262
We know from a previous study (Eriksson et al.,
2013) that the number of test requirements for deci-
sion (or predicate) coverage of our applications in-
creases by 69% as an average when the xtUML model
is transformed to C++ code. The increase shows that
these applications contain a large number of implicit
predicates that become explicit during transforma-
tion. However, we have also shown that if the implicit
predicates residing in the conditional links in navi-
gation of associations, and in the for-each loops are
covered by test requirements at the model level, the
increase in number of test requirements after trans-
formation to code drops to zero for four of the six
applications and less than 0.5% as an average.
The purpose with the new model coverage crite-
ria all-navigation (ANAV) and all-iteration (ITER) is
to cover the implicit predicates in UML behavioral
models that becomes explicit as the model is trans-
formed to code. The new criteria target these implicit
predicates at the model level. ANAV ensures that all
conditional links in an association path are evaluated
to both not empty and if possible empty (not includ-
ing any infeasible navigation steps) in the direction of
navigation. This will guarantee that we have tested
2
http://saab.com/air/gripen-fighter-system/gripen/gripen/
MODELSWARD 2016 - 4th International Conference on Model-Driven Engineering and Software Development
594

at least two possible configurations of instances sat-
isfying each conditional link in the association path
during run-time. ITER ensures that for-each loops are
executed both zero times and and least once and will
guarantee that we have tested the two possible evalu-
ations of all implicit conditions that reside in for-each
loops.
Hence, our proposed criteria cover most of the im-
plicit predicates in our six applications and by com-
bining them with the logic-based criterion decision
(or predicate) coverage, which covers the explicit
predicates, we will as an average capture 99.5% of the
test requirements for code-level decision coverage of
our six applications at the model level. Hence, func-
tional testing by simulation can be performed at the
same level of abstraction as the design is conducted
while the quality of the test suite can be estimated
without the need of first transforming the model to
code.
Moreover, if 100% coverage of a logic-based cri-
terion must be achieved at code-level there is no point
in actually executing tests at the code level until the
functional testing at model level has achieved 100%
model coverage with respect to the logic-based crite-
rion as well as both ANAV and ITER. The reason is
that as long as there are implicit predicates that re-
mains to be covered in the model, there will also be
explicit predicates in the code that the tests will not
cover.
Table 2: Test requirements for application A3.
Number of Test Requirements
Model level Code level
Action Source ANAV Predicate ITER Predicate
if() 146 146
elif() 14 14
while() 6 6
set-iteration() 44 44
select-1-step() 86
select-2-step() 32 32
select-3-step() 24 24
select-where() 48 48
select-others() 10
Total number 142 214 44 324
Our previous studies have focused on the trans-
formation impact on the number of test requirements
with respect to logic-based coverage criteria. In order
to evaluate the effect of using our proposed criteria
ANAV and ITER in combination with a logic-based
criteria, we take a closer look at one of the applica-
tions, A3. Table 2 shows the details of the set of test
requirements for application A3. We can see the dis-
tribution of test requirement for ANAV, Predicate and
ITER respectively in column Model level. Column
Code level shows the distribution of test requirements
for Predicate at code level. Each row in Table 2 corre-
sponds to a type of action source in the model. For ex-
ample, we can see that 44 of the test requirements that
need to be covered at code level in order to get Pred-
icate coverage come from implicit predicates in set-
iteration statements in the action code. We can also
see in the same row that these 44 test requirements
are only captured by ITER at the model level. The
action sources named select-x() represents different
kind of navigation statements; select-1-step, select-2-
step and select-3-step represents selection queries in-
cluding one, two or three conditional navigation steps.
The select-where represent predicates which is evalu-
ated to further limit the number of objects returned by
a selection query. Finally, the select-others represent
selection queries that are unconditional, and includes
navigation steps starting with set of objects, which en-
able generation of for-loop statements including exit
criterion as a predicate in the C++ code.
It is clear from Table 2 that all types of sources
(i.e., all rows) contributes to the test requirements for
Predicate coverage of the C++ code, except for the
select-1-step where the explicit predicate is only gen-
erated if further navigation steps are followed after a
conditional navigation step. However, in this case is
the modeler responsible for explicitly check the se-
lection result before further usage. Hence, these test
requirements should be tested at the model level.
It is also clear that all three criteria ANAV, Pred-
icate and ITER have to be applied to capture all the
test requirements at the model level. Finally, we can
see that the total number of test requirements that we
get for the model is higher than for the code. The
reason for this is that there is sometimes an overlap
between the three model criteria as we have described
in Section 3.
In order to study the difference in model and code
coverage, we ran a test suite for application A3 and
measured the coverage at both model and code level
when the ANAV and ITER criteria were applied. The
tools used in this experiment are the BridgePoint
1
for the UML modeling environment and the model-
compiler, and for measuring structural code coverage
the tool Cantata++
3
was used.
To our knowledge, there is no available tool, in-
cluding BridgePoint, that enables measuring of model
coverage during simulation of behavioral UML mod-
els using actions. Therefore we designed and imple-
mented a plugin to the model compiler to be used in
our test framework. The plugin enables measuring the
model coverage during simulation. Both ANAV and
ITER are included as metrics. Moreover, logic-based
and model-based coverage criteria according to DO-
3
http://www.qa-systems.com/cantata.html
UML Associations - Reducing the Gap in Test Coverage between Model and Code
595

C++
Code
Model
Compiler
Instrumentation
(Cantata++)
Code Level Instrumentation
Trace
Data
C++
Compiler
C++
Code
xtUML
Models
M
Application
xtUML
Models
M’
Instrumentation
(Model Compiler)
Model
Compiler
Model Level Instrumentation
Test
Cases
Coverage Collection
Figure 4: The setup for measuring test coverage.
178C (RTCA, 2011a) and DO-331 (RTCA, 2011b)
are also included. The design of the framework is
based on our previous work (Eriksson et al., 2013)
and work by Kelly et al. (Hayhurst and Veerhusen,
2001). The idea is to transform a design model M
to an instrumented model M’ before generating C++
code automatically via the model-compiler, as shown
in Figure 4. Note, the simulation of the model behav-
ior is performed through a compiled version instead
of using the model interpreter built into BridgePoint,
this is only for practical reasons and will not influence
the outcome.
Table 3: Test coverage at model level and code level for
application A3.
Number of Covered Test Requirements
Model level Code level
ANAV Predicate Iteration Predicate
Total 142 214 44 324
Executed 96 144 28 237
Coverage (%) 68 67 64 73
Table 3 shows a snapshot of the coverage achieved
by the current version of the test suite for application
A3. The application is under development and the test
suite is therefore, not yet complete. Hence, the cover-
age is less than 100% for both code and model. The
coverage at the model level (67% as a total) is slightly
less than the coverage level for the code (73%). This
has to do with the overlap between the criteria for
model coverage that we have seen and discussed in
Section 3. Since two overlapping test requirements
are covered by exactly the same test cases, the differ-
ence in coverage between model and code is reduced
as new test cases are executed and the coverage is in-
creased. Hence, the closer we get to the goal of 100%
coverage, the higher is our confidence that the cover-
age measured for the model corresponds to the cover-
age we will get for the code.
Adding the criterion all-navigation to the model
level becomes even more important in problem do-
mains where conditional associations are used for ex-
pressing complex application logic, which constraints
the behavior during run-time. An increase in the
number of test requirements derived from the all-
navigation and all-iteration, can also be interpreted
as a measure of the degree of application logic com-
plexity. As an example, the part of the in-house
model-compiler that transforms the OAL constructs,
and which we have used in our studies is modeled in
xtUML and transformed into C++. The traditional
abstract syntax tree that represents a programming
language is here represented in xtUML as a meta-
model, and the model-compiler behavior is specified
in OAL code. Table 1 shows a summary of the model-
compiler, application A6. A significant amount of
structural constructs, and statements in the object ac-
tion language is conditional or optionally, and these
rules are formalized as conditional associations be-
MODELSWARD 2016 - 4th International Conference on Model-Driven Engineering and Software Development
596

tween classes in the meta-model for OAL. Which
in this case with large likelihood is that the model-
compiler have a higher application logic complex-
ity than the application A3, Table 1, and therefore
needs more configurations, combination of instances,
to cover the specified functionality.
5 CONCLUSIONS AND
DISCUSSION
We address the overall problem of estimating the
quality of a test suite that is required to fulfill code
coverage according to logic-based coverage criteria,
in a model-driven development environment where
both design and test activities are performed using
models of the software. We have presented two new
coverage criteria for executable UML models ANAV
and ITER, and shown that these two should be com-
bined with the logic-based criterion when testing the
executable model. As long as the coverage is less than
100% at the model level, there is no point in running
the tests at the code level since all functionality of
the model is not yet tested, and this is necessary to
achieve 100% coverage at the code level.
5.1 Threats to Validity
When it comes to validity threats of case studies, it
can usually be argued that the study might be too
small and the software not representative. However,
the coverage criteria that we suggest applies to exe-
cutable UML models and the models we use cover
all types of elements (e.g., associations and multiplic-
ity) and structural constructions (e.g., loops and if-
statements) that are allowed in the language for exe-
cutable UML, i.e., xtUML and fUML. Moreover, the
models are real applications developed by different
teams in the aeronautics domain, which shows that
the constructs that our criteria target, is used by dif-
ferent developers. Finally, one of our applications is
an example of a very complex piece of software. A6
is a model compiler that takes an xtUML model as
input and generates the C++ code. The model ele-
ments and constructs that our proposed criteria target
are even more frequent in A6 than in any of the other
models.
A potential threat to validity might be the fact that
the same model compiler is used for all applications.
A model compiler is free to translate the model as
long as the semantics and functionality of the soft-
ware is maintained. Hence, another compiler can give
a slightly different translation to code than the one we
used. However, our models conforms to and cover
the language of executable UML models and the ele-
ments and structures that ANAV and ITER target are
present in such models. Independent of model com-
piler, the implicit predicates that we find in these el-
ements and structures will be translated to explicit
predicates. The number of predicates and their loca-
tions in the code might however, differ between com-
pilers.
5.2 Related Work
There are several papers on how to implement UML
associations in programming languages (Akehurst
et al., 2007; Goldberg and Wiener, 2011; Diskin et al.,
2008), and also authors that argue that relations as a
semantic constructs should be an already built-in con-
struct in object-oriented languages (Rumbaugh, 1987;
Nelson et al., 2008). The semantics of associations is
also investigated thoroughly in (Milicev, 2007). All
this work emphasize the needs and importance of a
correct implementation and interpretation of relation-
ships, which is a strong argument for the need of our
new all-navigation criterion.
The new criterion all-navigation can be seen as a
further development of the association-end multiplic-
ity (AEM) criterion and the generalization (GN) cri-
terion defined by (Andrews et al., 2003). When test-
ing a model, the AEM criterion will ensure that the
model is instantiated so that both boundary and non-
boundary occurrences of association links between
runtime-objects are created. While the GN criterion
will require the model to be tested with instantia-
tions of each type of the specialization. The differ-
ence between the criteria by (Andrews et al., 2003)
and the criterion all-navigation is where in the model
the model elements are covered. The criteria AEM
and GN is fulfilled globally among all statements in
the behavioral specification, while the all-navigation
criterion have to be fulfilled locally within the same
association navigation statement resulting in an thor-
oughly testing of that particular statement.
The idea that loops should be covered thoroughly
is not new, it was recognized already back in the
70’s (Howden, 1978) and several graph-based criteria
such as edge-pair, round-trip and prime-path cover-
age have been defined to ensure that loops are thor-
oughly covered by tests (Chow, 1978; Binder, 2000;
White and Wiszniewski, 1991; Ammann and Offutt,
2008). Our proposed criterion all-iteration is needed
together with all-navigation and the logic-based cri-
teria to fully support model coverage of executable
UML models regardless of the implementation of ac-
tions used for association navigation or iterations over
set.
UML Associations - Reducing the Gap in Test Coverage between Model and Code
597

5.3 Future Work
The plan is to extend our method to include trace-
ability functionality of model constructs to code con-
structs needed for coverage analysis. The traceabil-
ity functionality should be platform independent and
make it possible to compare test requirements derived
from the model level and the code level. An evalu-
ation of the usability of the complete method should
also be conducted.
In the long-term, the aim is to support model cov-
erage analysis according to DO-331 (RTCA, 2011b),
and take credit for parts of the verification activities
already at model level by simulation instead of at the
code level.
ACKNOWLEDGEMENTS
This research was partially supported by Research
Grant 2013-01215 from the VINNOVA (Swedish
Governmental Agency for Innovation Systems).
We thank Martin Nilsson at Saab Aeronautics
for his collaboration with the implementation of the
xtUML model coverage tool used in this research.
REFERENCES
Akehurst, D., Howells, G., and McDonald-Maier, K.
(2007). Implementing associations: Uml 2.0 to java
5. Software & Systems Modeling, 6(1):3–35.
Ammann, P. and Offutt, J. (2008). Introduction to soft-
ware testing. New York: Cambridge University Press,
ISBN 978-0-521-88038-1.
Andrews, A., France, R., Ghosh, S., and Craig, G. (2003).
Test adequacy criteria for UML design models. Soft-
ware Testing, Verification and Reliability, 13(2):95–
127.
Binder, R. (2000). Testing object-oriented systems: models,
patterns, and tools. Addison-Wesley Professional.
Chen, P. P.-S. (1976). The entity-relationship modelto-
ward a unified view of data. ACM Transactions on
Database Systems (TODS), 1(1):9–36.
Chilenski, J. J. (2001). An investigation of three forms
of the modified condition decision coverage (MCDC)
criterion. Technical report, Office of Aviation Re-
search.
Chow, T. S. (1978). Testing software design modeled by
finite-state machines. IEEE Trans. Software Eng.,
4(3):178–187.
Diskin, Z., Easterbrook, S. M., and Dingel, J. (2008). Engi-
neering Associations: From Models to Code and Back
through Semantics. In TOOLS (46), pages 336–355.
Springer.
Eriksson, A., Lindstr
¨
om, B., Andler, S. F., and Offutt, J.
(2012). Model Transformation Impact on Test Arti-
facts: An Empirical Study. In Proceedings of the 9th
workshop on Model-Driven Engineering, Verification
and Validation.
Eriksson, A., Lindstr
¨
om, B., and Offutt, J. (2013). Transfor-
mation rules for platform independent testing: An em-
pirical study. In Software Testing, Verification and Val-
idation (ICST), 2013 IEEE Sixth International Confer-
ence on, pages 202–211.
Goldberg, M. and Wiener, G. (2011). Generating Code for
Associations Supporting Operations on Multiple In-
stances. In Evaluation of Novel Approaches to Soft-
ware Engineering, pages 163–177. Springer.
Hayhurst, K. J. and Veerhusen, D. S. (2001). A practical
approach to modified condition/decision coverage. In
Digital Avionics Systems, 2001. DASC. 20th Confer-
ence, volume 1, pages 1B2–1. IEEE.
Howden, W. E. (1978). An evaluation of the effectiveness of
symbolic testing. Software: Practice and Experience,
8(4):381–397.
Hutchinson, J., Whittle, J., Rouncefield, M., and Kristof-
fersen, S. (2011). Empirical assessment of mde in
industry. In Proceedings of the 33rd International
Conference on Software Engineering, pages 471–480.
ACM.
Kirner, R. (2009). Towards preserving model coverage and
structural code coverage. EURASIP Journal on Em-
bedded Systems, 2009:6:1–6:16.
Mellor, S. J. and Balcer, M. J. (2002). Executable UML:
A Foundation for Model Driven Architecture. Boston:
Addison Wesley, ISBN 0-201-74804-5.
Mellor, S. J., Scott, K., Uhl, A., and Weise, D. (2004).
MDA Distilled: Priciples of Model-Driven Architec-
ture. Boston: Addison Wesley, ISBN 0-201-78891-8.
Milicev, D. (2007). On the semantics of associations and
association ends in uml. Software Engineering, IEEE
Transactions on, 33(4):238–251.
Nelson, S., Noble, J., and Pearce, D. J. (2008). Implement-
ing first-class relationships in Java. Proceedings of
RAOOL, 8.
OMG (2011). Unified Modeling Language
(UML), Superstructure, version 2.4.1. http://
www.omg.org/spec/UML/2.4.1.
OMG (2013). Action Lanaguage for Foundational UML
(ALF), version 1.0.1. retrived September 14, 2011.
OMG (2013). Foundational Subset of Executable UML
(FUML), version 1.1.
Planas, E., Cabot, J., and Gmez, C. (2009). Verifying
Action Semantics Specifications in UML Behavioral
Models. In Advanced Information Systems Engineer-
ing, volume 5565 of LNCS, pages 125–140. Springer
Berlin / Heidelberg.
RTCA (2011a). RTCA Inc. DO-178C: Software Consider-
ations in Airborne Systems and Equipment Certifica-
tion.
RTCA (2011b). RTCA Inc. DO-331: Model-Based Devel-
opment and Verification Supplement to DO-178C and
DO-278A.
Rumbaugh, J. (1987). Relations as semantic constructs in
an object-oriented language. In ACM Sigplan Notices,
volume 22, pages 466–481. ACM.
MODELSWARD 2016 - 4th International Conference on Model-Driven Engineering and Software Development
598

Selic, B. (2012). The Less Well Known UML. In Formal
Methods for Model-Driven Engineering, pages 1–20.
Springer.
White, L. J. and Wiszniewski, B. (1991). Path testing of
computer programs with loops using a tool for sim-
ple loop patterns. Softw. Pract. Exper., 21(10):1075–
1102.
Zhu, H., Hall, P. A., and May, J. H. (1997). Software unit
test coverage and adequacy. Acm computing surveys
(csur), 29(4):366–427.
UML Associations - Reducing the Gap in Test Coverage between Model and Code
599
