
Addressing the Need for Strict Meta-modeling in Practice - A Case Study
of AUTOSAR
Darko Durisic
1
, Miroslaw Staron
2
, Matthias Tichy
3
and J¨orgen Hansson
4
1
Volvo Car Group, Gothenburg, Sweden
2
Chalmers | University of Gothenburg, Gothenburg, Sweden
3
University of Ulm, Uml, Germany
4
University of Sk¨ovde, Sk¨ovde, Sweden
Keywords:
Strict Meta-modeling Principle, Domain-specific Meta-modeling, Deep Meta-modeling, AUTOSAR.
Abstract:
Meta-modeling has been a topic of interest in the modeling community for many years, yielding substantial
number of papers describing its theoretical concepts. Many of them are aiming to solve the problem of tradi-
tional UML based domain-specific meta-modeling related to its non-compliance to the strict meta-modeling
principle, such as the deep meta-modeling approach. In this paper, we show the practical use of meta-models
in the automotive development process based on AUTOSAR and visualize places in the AUTOSAR meta-
model which are broken according to the strict meta-modeling principle. We then explain how the AUTOSAR
meta-modeling environment can be re-worked in order to comply to this principle by applying three individual
approaches, each one combined with the concept of Orthogonal Classification Architecture: UML extension,
prototypical pattern and deep instantiation. Finally we discuss the applicability of these approaches in practice
and contrast the identified issues with the actual problems faced by the automotive meta-modeling practition-
ers. Our objective is to bridge the current gap between the theoretical and practical concerns in meta-modeling.
1 INTRODUCTION
The use of meta-models (Saeki and Kaiya, 2007)
in the development of large software systems has
been in focus of the modeling research community
for more than a decade. Object Management Group
(OMG) provides a standardized framework for devel-
oping models as instances of domain-specific meta-
models, which are instances of UML, which in turn
is an instance of MOF (Meta-Object Facility) (MOF,
2004). This forms a commonly referred 4-layer meta-
modeling hierarchy of MOF. OMG also defines a
standard for the exchange of models between domain-
specific modeling tools based on XML known as XMI
(XML Metadata Interchange) (XMI, 2011).
Numerous papers have pointed out that the frame-
work of OMG fails to comply to one of the basic
meta-modeling principles known as the strict meta-
modeling (Atkinson and K¨uhne, 2002). According
to this principle, each model element on one meta-
modeling layer is an instance of exactly one element
on the layer above, with no other possible relation-
ships between the layers. In case of UML, instances
of domain-specific classifiers are at the same time in-
stances of the UML meta-class ”Object” (the problem
known as dual classification (Atkinson and K¨uhne,
2001)). Additionally, the use of UML stereotypes
for giving additional semantics to the domain-specific
meta-model elements and/or their instances presumes
that the language definition of stereotypes and their
instances reside on the same layer as UML. For this
reason, UML based meta-modeling fails to comply to
the strict meta-modeling principle and therefore can
be classified as ”loose” meta-modeling.
A number of proposal have been made to intro-
duce strictness into the UML based meta-modeling.
Probably the most discussed approach in the literature
is the one proposed by Atkinson and K¨uhne known as
the deep meta-modeling, which relies on the concepts
of Orthogonal Classification Architecture (OCA) and
deep instantiation (Atkinson and Kuhne, 2003). OCA
is able to expressthe distinction between the linguistic
and ontological (semantic) instantiations in the meta-
modeling hierarchy, thus solving the dual classifica-
tion problem. Deep instantiation on the other hand
enables the existence of more than two ontological
layers which can be used to give additional semantics
to the meta-classes, instead of stereotypes.
Durisic, D., Staron, M., Tichy, M. and Hansson, J.
Addressing the Need for Strict Meta-modeling in Practice - A Case Study of AUTOSAR.
DOI: 10.5220/0005745303170322
In Proceedings of the 4th International Conference on Model-Driven Engineering and Software Development (MODELSWARD 2016), pages 317-322
ISBN: 978-989-758-168-7
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
317

Despite this, the practical consequences of loose
meta-modeling remain unclear to the majority of
practitioners. Additionally, there is a lack of industrial
applications of the strict meta-modeling approaches,
such as deep meta-modeling, and the analysis of their
benefits/drawbacks in comparison to the UML ap-
proach. We believe that these studies are needed to
bridge the current gap between the work of meta-
modeling researchers and the problems faced by the
meta-modeling practitioners.
In this paper, we explore the use of domain-
specific meta-modeling in the context of automotive
model driven development where, with the introduc-
tion of AUTOSAR (AUTomotive Open System AR-
chitecture) (AUT, 2003), UML-based meta-modeling
is taken as a basis for specifying the architecture of
automotive systems. The goal of this paper is to ad-
dress the following research questions:
• Q1 What are the consequences of UML based
loose meta-modeling in the automotive domain?
• Q2 What are the drawbacks of approaches for as-
suring strictness of the AUTOSAR meta-model?
• Q3 What are the practical meta-modeling con-
cerns of the automotive modeling practitioners?
We achieve this by visualizing places in the AU-
TOSAR meta-model which are not compliant to the
strict meta-modeling principle and re-working the
AUTOSAR meta-modeling environment according to
the rule of strictness using three distinct approaches:
UML extension, prototyping pattern and deep instan-
tiation. We combine each approach with the OCA
representation of the layers and discuss their benefits
and drawbacks in practice. Finally, we explain why
the issues of loose meta-modeling are not the primary
concern of the automotive practitioners and contrast
them with the actual problems they face in their work.
The rest ofthis paper is structured as follows: Sec-
tion 2 describes the role and hierarchy of the AU-
TOSAR meta-model in the automotive modeling en-
vironment. Section 3 applies three approaches for
assuring compliance of the AUTOSAR meta-model
to the strict meta-modeling principle. Section 4 dis-
cusses the benefits and drawbacksof these approaches
in practice. Finally we conclude in Section 5 with
some guidelines for future meta-modeling research.
2 AUTOMOTIVE MODELING
Automotive software system is a distributed system
with typically more than 100 Electronic Control Units
(ECUs) today responsible for executing allocated ve-
hicle functions. Apart from its distributed organiza-
tion, the development of the automotive software sys-
tems is also distributed as ECUs are usually devel-
oped by a hierarchy of suppliers, e.g. application soft-
ware, middleware and hardware suppliers. In order
to facilitate this distributed development, AUTOSAR
standard was introduced as a joint partnership of car
manufacturers and their suppliers.
The goal of AUTOSAR is to standardize the ar-
chitecture of the automotive systems and their devel-
opment methodology. Figure 1 shows a common AU-
TOSAR based model-drivendevelopmentprocess un-
til the generation of the ECU source code.
Architectural
design
ECU
model
ECU functional
development
ECU config
ECU
Config.
model
ECU
req.
spec.
Simulink
model
ECU functional
code generation
Func.
code
ECU config
code generation
Config.
code
AR.
meta-
model
instanceOf
semantics
instanceOf
AR.
Templ.
AUTOSAR
Car manufacturer
Supplier
Figure 1: AUTOSAR based software development process.
The development starts with the Architectural de-
sign, which includes the definition of the ECUs and
allocation of the software components onto them. As
ECU development is usually done by different suppli-
ers, the complete architectural model is divided into
a number of ECU models, each one delivered to the
chosen supplier. Because different car manufacturers
and suppliers may use different modeling tools, assur-
ing their interoperability is quite challenging.
To facilitate this interoperability,AUTOSAR meta-
model is defined as a standardized domain-specific
modeling language for the architectural ECU models,
i.e. an ECU model represents an instances of the AU-
TOSAR meta-model that specifies its syntax. The se-
mantics is specified in the specifications called AU-
TOSAR templates (Gouriet, 2010). Therefore the AU-
TOSAR meta-model serves as a basis for the develop-
ment of the automotive modeling tool-chain.
Figure 2 shows an example of the AUTOSAR
meta-model which is used to specify the allocation
of the software components onto ECUs, and a cor-
responding model allocating the EnginePowerUnit
component onto the EngineControlModule ECU
(Durisic et al., 2014). The AUTOSAR models are ex-
pressed in XML and they are validated by the XML
schema which is generated from the AUTOSAR
meta-model using a set of defined transformation.
The ECU model and the ECU requirements spec-
ification defining the behavior of the allocated soft-
ware components serve as basis for the ECU func-
tional development. This is usually done in Simulink
MODELSWARD 2016 - 4th International Conference on Model-Driven Engineering and Software Development
318

Referrable
+ shortName :String
Identifiable
+ uuid :String
Ecu
+ busWakeUp :Boolean
+ diagAddress :Integer
SwcToEcuMapping
SoftwareComponent
:Ecu
shortName = EngineControlModule
uuid = A2CD0720
diagAddress = 12
busWakeUp = false
:SoftwareComponent
shortName = EnginePowerUnit
uuid = FOAAD679
:SwcToEcuMapping
shortName = Mapping32
uuid = A19FAB93
Meta-Model
Model
+swc 1
+ecu 1
+ecu
+swc
Figure 2: AUTOSAR meta-model example.
as it supports automated ECU functional code gener-
ation from the Simulink models (Liu et al., 2013).
Apart from being input to the functional devel-
opment, the ECU models also serve as basis for the
ECU configuration, i.e. configuration of the middle-
ware (e.g. ECU communication, diagnostics). One
ECU can be configured using a number of parameters.
The values of certain parameters can be automatically
generated from the attributes of the ECU model, e.g.
signal transmission period. Other parameters, e.g. re-
lated to the operating system, need to be configured
in the ECU configuration tools (Lee and Han, 2009).
Based on the complete ECU configuration model in-
stantiating the AUTOSAR meta-model, Configuration
code (C-structs) can be automatically generated in the
ECU configuration code generation phase.
The final ECU software is obtained by compiling
and linking the Functional code generated from the
Simulink models, the Configuration code generated
from the ECU models and completed in the ECU con-
figuration tools and the actual implementation of the
AUTOSAR middleware (commonly known as AU-
TOSAR basic software). The basic software is en-
tirely specified by AUTOSAR and it is usually imple-
mented outside of the model driven approach. The
language mostly used in the automotive domain is C.
Based on the described process, we can conclude
that the AUTOSAR meta-model plays an important
role in the architectural design of the system and the
configuration of the ECU basic software.
2.1 AUTOSAR Meta-model Hierarchy
MOF (Meta-Object Facility) (MOF, 2004), an ac-
cepted standard for model-drivenengineering, defines
the following 4-layer meta-modeling hierarchy:
1. M3: MOF meta-meta-model
2. M2: UML meta-model
3. M1: Application model
4. M0: Application data
These layers are connected by the instantiation
mechanism, i.e., each layer represents an instance of
the layer above, except for the top layer which is con-
sidered to be an instance of itself. According to the
strict meta-modeling principle (Atkinson, 1998), each
model element on one layer is an instance of exactly
one element on the layer above.
The meta-modeling hierarchy of MOF exhibitsthe
property known as dual classification (Atkinson and
K¨uhne, 2002). This is a consequence of the two no-
tions of the instanceOf relationship - linguistic, defin-
ing the language (e.g. EngineControlModule is a
UML Object), and ontological, defining the seman-
tics (e.g. EngineControlModule is an ECU) (Atkin-
son and Kuhne, 2003). This means that the objects on
the M1 layer are both ontological instances of the M1
classes and linguistic instances of the M2 meta-class
Object, thus breaking the strict modeling principle.
To resolve this problem, MOF considers the strict
meta-modeling principle only for the linguistic notion
of the instanceOf relationship. AUTOSAR, however,
attempts to visualize both linguistic and ontological
layers in the meta-modeling hierarchy thus defining
the following 5 meta-modeling layers (AUT, 2014):
1. ARM4: MOF meta-meta-model
2. ARM3: UML meta-model and AR profile
3. ARM2: AUTOSAR meta-model
4. ARM1: AUTOSAR model
5. ARM0: AUTOSAR run-time objects
By examining the semantics of the layers, we can
see that the ARM1 (containing objects) is an ontolog-
ical instance of the ARM2 (containing classes) and
both the ARM1 and ARM2 are linguistic instances
of the ARM3 (containing meta-classes Class and Ob-
ject). Therefore the illustration of the AUTOSAR lay-
ers breaks the strict meta-modeling principle as the
ARM1 objects directly instantiate (linguistically) the
ARM3 meta-class Object. On the ARM3 layer, AU-
TOSAR also extends the UML meta-model with its
own AUTOSAR Template Profile (ATP). An simpli-
fied example of the AUTOSAR meta-layers and the
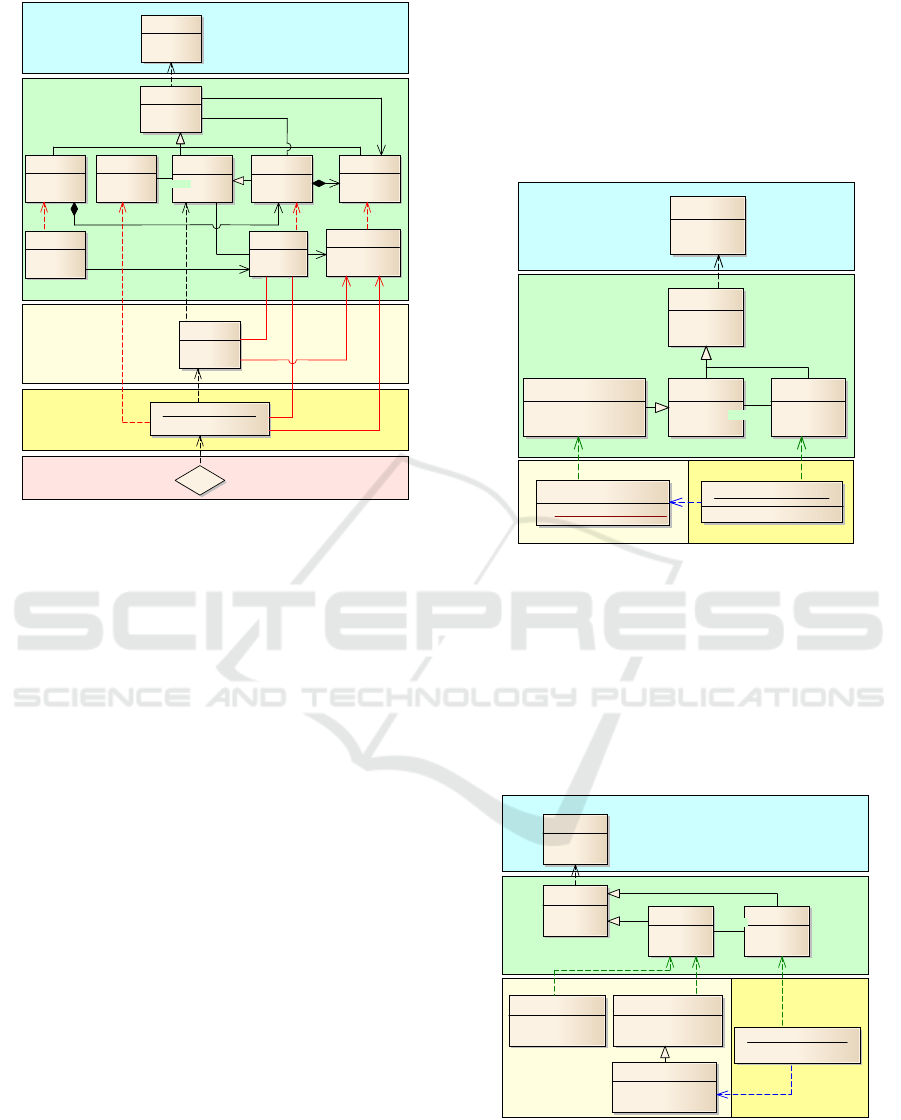
ATP profile is presented in Figure 3.
AUTOSAR defines a number of umlStereotypes in
the atpProfile and we show one of them, atpVariation,
applicable to umlClasses (indicates that a class may
have different variants), with the corresponding atp-
BindingTime tagged value (indicates when the variant
shall be bound). All stereotypes are branding both
classifiers and instances (Atkinson et al., 2002).
Figure 3 also shows three types of the non-
compliance of the AUTOSAR meta-modeling hierar-
chy with respect to the strict meta-modeling principle
(indicated by the numbers [1], [2] and [3]):
Addressing the Need for Strict Meta-modeling in Practice - A Case Study of AUTOSAR
319
ARM0
ARM1
ARM2
ARM4
ARM3
umlElement
+ name :string
umlClass umlStereotype
umlProfile umlTaggedValue
+ value :string
atpProfile atpVariation
atpBindingTime
+ value = PostBuild
ECU
EngineControleModule :ECU
umlObject
mofElement
ECM
+stereotypes
*
+tags
*
+base
+tags
*
+base
+classifier
+base
*
Figure 3: Example of the AUTOSAR meta-layers.
[1] The EngineControlModule on the ARM0 layer is
a direct linguistic instance of the umlObject on the
ARM3 layer (dual classification).
[2] The atpProfile, atpVariation and atpLatestBind-
ingTime represent ontological instances of the
umlProfile, umlStereotype and umlTaggedValue,
respectively, even though they reside on ARM3.
[3] The non-instanceOf relationships between the at-
pVariation / atpLatestBindingTime and the ECU /
EngineControlModule cross the layer boundaries.
3 ASSURING STRICTNESS OF
AUTOSAR
The dual classification problem [1] can be solved us-
ing the OCA with two dimensions, where the onto-
logical instantiation is depicted horizontally and the
linguistic vertically. The problems related to the use
of stereotypes [2] and [3] can be solved using differ-
ent approaches and we show in this paper three of
them combined with OCA: UML extension, prototyp-
ical pattern and deep instantiation (referred to as deep
meta-modeling in combination with OCA).
UML Extension: In this approach, the umlClass
on the linguistic layer L2 is directly extended by the
atpVariableClass with the attribute atpBindingTime
by means of inheritance, as shown in Figure 4. Green
color indicates linguistic instantiation (between L lay-
ers) while blue color indicates ontological instanti-
ations (between O layers). The linguistic instantia-
tion of the atpBindingTime attribute from the L2 layer
shall be done in a static manner, i.e. all O0 instances
of ECU shall have ”PostBuild” atpBindingTime. The
L0 layer is omitted due to its questioned value in the
meta-modeling hierarchy (Harel and Rumpe, 2004).
L2
L1, O1 L1, O0
umlElement
+ name :string
umlClass
ECU
+ atpBindingTime = PostBuild
EngineControleModule :ECU
atpBindingTime = PostBuild
L3
atpVariableClass
+ atpBindingTime :string
umlObject
mofElement
+classifier
Figure 4: Example of UML extension.
Prototypical Pattern: In this approach, the uml-
Class on the L2 layer is instantiated into a number
of atpVariable classes for different values of the atp-
BindingTime, e.g. atpPreBuildVariableClass and atp-
PostBuildVariableClass, as shown in Figure 5. The
actual domain-specific L1 classes, such as ECU, are
then inherited from the right atpVariableClass de-
pending on the intended value of the atpBindingtime.
L1, O0L1, O1
L2
L3
umlElement
+ name :string
umlClass
ECU
EngineControleModule :ECU
atpPostBuildVariableClass
umlObject
mofElement
atpPreBuildVariableClass
+classifier
Figure 5: Example of prototypical pattern.
Deep Instantiation: In this approach, the hierar-
chy of more than two ontological instantiations is al-
lowed, i.e. domain-specific classes can be instantiated
by other classes, not just objects as in UML.
MODELSWARD 2016 - 4th International Conference on Model-Driven Engineering and Software Development
320

L1,O0L1,O1L1,O2
L2
L3
umlElement
+ name :string
umlClass
ECU:
atpVariableClass
EngineControleModule :
ECU
atpVariableClass
l1 :l
value = PostBuild
l:atpBindingTime
+ value = PostBuild
umlObject
mofElement
atpBindingTime
+ value :string
+classifier
Figure 6: Example of deep instantiation.
Figure 6 shows an example of the deep instan-
tiation. O2 classes (e.g. atpVariableClass) are lin-
guistically instantiated from the umlClass, just like
the domain-specific classes on the O1 layer (e.g.
ECU) ontologically instantiating the corresponding
O2 classes. The objects instantiating the O1 classes
reside on the O0 layer. The ontological instantiation
of the O2 class attributes (e.g. value of the atpBind-
ingTime) shall be done in a static manner, i.e. all O0
instances shall have the same value.
4 DISCUSSION
We showed in Section 2.1 that the AUTOSAR meta-
modeling environment relies on the traditional UML
based meta-modeling extended with the UML stereo-
types. The consequences of this approach (Q1) de-
scribed in Section 2.1 (see [1], [2] and [3]) are solved
by the majority of UML based modeling tools avail-
able on the market today (e.g. Enterprise Architect
used by AUTOSAR).
For solving the problem of dual classification [1],
modelers are required to create instances as Objects
(linguistic instantiation) and then classify them with
the correct Class (ontological instantiation). The
stereotype related problems [2] and [3] can be solved
by providing a graphical interface to the modelers for
mapping the applicable stereotypes to the actual UML
elements (e.g. atpVariation is applicable to Classes).
Regarding the use of the three proposed ap-
proaches instead of stereotypes that assure strictness,
the prototypical pattern can be applied in the tradi-
tional UML based tools. However it is not feasi-
ble for large domain-specific meta-models because a
new top-layer meta-class is required for each pair of
stereotype-tagged value creating a wide and deep in-
heritance hierarchy of meta-classes. For example, we
need a new top layer class for atpPostBuildVariation-
Point, atpPreCompileVariationPoint, etc.
UML extension and deep instantiation ap-
proaches, on the other hand, require special mod-
eling tools. For UML extension, modelers would
need to extend the UML meta-model with domain-
specific classes and then create their linguistic in-
stances (e.g. ECU as an instance of atpVariableClass
rather than umlClass). For deep instantiation, mod-
elers would need to define classes as ontological in-
stances of other classes (e.g. ECU as an instance of
atpVariableClass). The use of OCA in all three ap-
proaches improves the correct understanding of the
meta-modeling hierarchy.
Despite the fact that there are some modeling
tools today supporting these approaches (e.g. Mela-
nee (Atkinson and Gerbig, 2012) for deep meta-
modeling), they were not available on the market
when the AUTOSAR meta-model was initially devel-
oped in 2003. Furthermore, they are still not widely
used in the industry. The designers of large software
systems are reluctant to accept new approaches and
tools until they have a long successful history of ap-
plication in different domains (Pagel and Br¨orkens,
2006). This is one of their major drawbacks (Q2).
Additionally, the majority of automotive model-
ing practitioners are not aware of the advanced meta-
modeling concepts, such as deep meta-modeling. For
example, even the formal definition of the AUTOSAR
profile (as an instance of the UML profile definition)
that required deeper analysis of the UML meta-model
was considered too complex for the automotive mod-
elers (Pagel and Br¨orkens, 2006). On the other hand,
they are mostly familiar with the use of UML and
UML stereotypes. Therefore there is no need for ad-
ditional training of engineers which is important for
companies where hundreds of modelers are responsi-
ble for the design of the system.
Finally, the approach used by AUTOSAR based
on UML extended with profiles and XML as an ex-
change format for the AUTOSAR models is a well es-
tablished approach used for many years. This makes
the automotive modeling practitioners reluctant to
changes it, unless a new approach can solve some of
the practical problems they face today such as (Q3):
• How to estimate the impact of domain-specific
meta-model evolution on the modeling tools?
• How to minimize the tooling interoperability is-
sues after adopting a new meta-model release?
• How to assure smooth integration of the models
based on different meta-model releases?
Addressing the Need for Strict Meta-modeling in Practice - A Case Study of AUTOSAR
321

To exemplify these problems, consider the follow-
ing automotive scenario: A new AUTOSAR meta-
model release supports 10 new architectural features.
5 ECUs in the system are interested in using 2 of them
while other ECUs do not need any, just minor func-
tional updates (e.g. new signals on the bus). This re-
quires that the architectural design tools support mul-
tiple partial meta-model releases for different ECUs
(or their superset, if possible), which may cause un-
expected issues in the ECU configuration tools. Addi-
tionally the integration of the ECU models developed
based on different meta-model releases may cause bus
and/or functional incompatibilities.
It remains unclear if and how the described meta-
modeling approaches support solving these practical
issues and whether there are significant differences
between the approaches related to them. However it is
clear that the mentioned issues affect the entire mod-
eling tool-chain which may be distributed among sev-
eral companies, while the problems related to strict-
ness can be solved by individual modeling tools.
5 CONCLUSIONS
In this paper, we recognize that the concept of
domain-specific meta-modeling strictness is not the
primary concern of the meta-modeling practitioners
designing large software systems with distributed im-
plementation, such as automotive systems. However
we believe that the approaches assuring strictness,
such as deep meta-modeling (deep instantiation com-
bined with OCA), could be employed in the develop-
ment process of such systems. We also believe that
a joint work of researchers and practitioners to re-
work a part of a real industrial domain-specific meta-
modeling environment, such as AUTOSAR, accord-
ing to these approaches would be needed to evaluate
their benefits and drawbacks. This would bridge the
current gap between the theoretical meta-modeling
discussion and their practical realization.
We also hope that this paper will lead to more re-
search addressing the practical problems described in
this paper both in the automotive domain and other
domains (e.g. avionics), such as the tooling interoper-
ability issues after the adoption of a new meta-model
version (or its subset) in the development projects.
ACKNOWLEDGEMENTS
We want to thank Swedish Governmental Agency for
Innovation Systems (VINNOVA), grant no. 2013-
02630, and Volvo Cars for funding this research.
REFERENCES
(2003). Automotive Open System Architecture. AUTOSAR,
www.autosar.org.
(2004). MOF 2.0 Core Specification. Object Management
Group, www.omg.org.
(2011). XML Metadata Interchange (XMI) Version 2.2 . Ob-
ject Management Group, www.omg.org.
(2014). AUTOSAR Generic Structure Template v4.2.1.
www.autosar.org.
Atkinson, C. (1998). Supporting and Applying the UML
Conceptual Framework. In International Workshop
on The Unified Modeling Language, pages 21–36.
Atkinson, C. and Gerbig, R. (2012). Melanie: Multi-level
Modeling and Ontology Engineering Environment. In
Objects, Models, Components, Patterns, page 7.
Atkinson, C. and K¨uhne, T. (2001). The Essence of Multi-
level Metamodeling. In International Conference on
the UML 2000, volume 2185, pages 19–33.
Atkinson, C. and K¨uhne, T. (2002). Rearchitecting the
UML Infrastructure. Transactions on Modeling and
Computer Simulation Journal, 12(4):291–321.
Atkinson, C. and Kuhne, T. (2003). Model-Driven Develop-
ment: A Metamodeling Foundation. Journal of IEEE
Software, 20(5):36–41.
Atkinson, C., K¨uhne, T., and Henderson-Sellers, B. (2002).
Stereotypical Encounters of the Third Kind. In In-
ternational Conference on The Unified Modeling Lan-
guage, pages 100–114.
Durisic, D., Staron, M., Tichy, M., and Hansson, J. (2014).
Evolution of Long-Term Industrial Meta-Models - A
Case Study of AUTOSAR. In Euromicro Conference
on Software Engineering and Advanced Applications,
pages 141–148.
Gouriet, P. (2010). Involving AUTOSAR Rules for Mecha-
tronic System Design. In International Conference on
Complex Systems Design & Management, pages 305–
316.
Harel, D. and Rumpe, B. (2004). Meaningful modeling;
whats the semantics of semantics? IEEE Computer,
37(10):64–72.
Lee, J. C. and Han, T. M. (2009). ECU Configuration
Framework Based on AUTOSAR ECU Configuration
Metamodel. In International Conference on Con-
vergence and Hybrid Information Technology, pages
260–263.
Liu, Y., Li, Y. Q., and Zhuang, R. K. (2013). The Appli-
cation of Automatic Code Generation Technology in
the Development of the Automotive Electronics Soft-
ware. In International Conference on Mechatronics
and Industrial Informatics Conference, volume 321-
324, pages 1574–1577.
Pagel, M. and Br¨orkens, M. (2006). Definition and Gen-
eration of Data Exchange Formats in AUTOSAR. In
European Conference on Model Driven Architecture-
Foundations and Applications, pages 52–65.
Saeki, M. and Kaiya, H. (2007). On Relationships among
Models, Meta Models and Ontologies. In 6th OOP-
SLA Workshop on Domain-Specific Modeling.
MODELSWARD 2016 - 4th International Conference on Model-Driven Engineering and Software Development
322
