
Approaching a Target using a Protection Feature based on Received
Signal Strength Indicator
Kazuyuki Ishii and Naoshi Sato
Information Security, Institute of Information Security,
2-14-1 Turuya-cho, Kanagawa-ku, Yokohama, Kanagawa, 221-0835, Japan
Keywords:
Search, RSSI, Approach and Departure, Protection Step Number, Wireless Device.
Abstract:
The received signal strength indicator (RSSI) which can be obtained during wireless communication, depend-
ing on communication distance, and is used to estimate the distance between a sender and receiver. We focus
on the RSSI to determine whether a mobile node is approaching or departing from a target node (TN). To
determine approach or departure, we implement the protection step number (PSN) as a protection feature that
determines approach or departure when RSSI varies N times of the PSN in a row. N is designed accord-
ing to RSSI deviation, and the value is computed statistically. In this paper, we demonstrate a method for
approaching a TN based on RSSI with and without the proposed PSN.
1 INTRODUCTION
1.1 Background and Motivation
Recently, interest in ad-hoc communication, which
can enable communication between wireless devices,
has been increasing. Wireless devices utilize a non
directional antenna to communicate in any direction
in ad-hoc communication. It can be useful during a
natural disaster as an emergency request from a dis-
aster victim can be received via ad-hoc communica-
tion(Toh, 2001)(Mase and Sakata, 2007). However, it
is difficult for rescue teams to approach disaster vic-
tims if there is a lack of location information rela-
tive to the disaster victims. Thus, we focus on the
received signal strength indicator (RSSI), which can
be obtained during wireless communication. In the-
ory, RSSI is an ordinal scale(Stevens, 1946) that is
inversely proportional to the square of communica-
tion distance in theory(Friis, 1946). Therefore, the
magnitude relationship of the RSSI value represents
distance. The varying strength of the RSSI value
can determine whether one is getting closer o further
away from a disaster victim. Therefore, we study how
wireless devices that receive an emergency request
(mobile node, MN) approach a disaster victim’s re-
questing wireless device (target node, TN).
1.2 Problem Statement
We consider the following problems.
• It is difficult to determine approach or depar-
ture, i.e., moving toward or away from the TN,
respectively, by comparing between RSSI value
because they can change significantly in the
same environment due to seasonal and weather
changes(Rappaport et al., 1996).
• It is difficult to estimate the direction of arrival
(DoA) because wireless devices employ non-
directional antennas(Carr, 1993).
For these reasons, it is difficult for the MN to ap-
proach the TN when the distance between the MN and
TN and the direction of the TN’s signal are unknown.
1.3 Objective
When moving to a TN using varying RSSI strengths
depending on measurement points, a protection fea-
ture is implemented to determine approach/departure
(approach/departure determination). We propose the
protection step number (PSN) as a protection feature
to prevent erroneous determination and reduce the
probability of moving in the wrong direction. This
number is designed statistically in consideration of
the current environment. To study an MN moving to
a TN based on RSSI, we assume that the MN and TN
170
Ishii, K. and Sato, N.
Approaching a Target using a Protection Feature based on Received Signal Strength Indicator.
DOI: 10.5220/0005750701700177
In Proceedings of 5th the International Conference on Operations Research and Enterprise Systems (ICORES 2016), pages 170-177
ISBN: 978-989-758-171-7
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reser ved

can communicate directly. In this study, we evalu-
ate an MN approaching a TN using the PSN through
computer simulation.
The reminder of this paper is organized as follows.
Section 2 discusses related work. Section 3 describes
the proposed method, including an overview, details,
and a description of our computer simulation model.
Approach/departure determination and the PSN are
also discussed in the Section 3. Section 4 presents
various simulation results, including a comparison be-
tween the proposed method and unused it. Section
5 discusses the results of computer simulations, and
conclusions are given in Section 6.
2 RELATED WORK
In order to approach a TN, the following three ele-
ments are considered.
(a) Estimation of distance based on RSSI. Many
studies of positioning techniques using wireless de-
vices have been conducted. In these studies, dis-
tance is estimated by trilateration(
ˇ
Capkun et al., 2002;
Niculescu and Nath, 2001; Priyantha et al., 2001;
Niculescu and Nath, 2003), which estimates the dis-
tance of an objective node while measuring the dis-
tance from more than three anchor nodes. Trilat-
eration is prone to error in distance estimation due
to error in the measured RSSI value. The trilatera-
tion method requires more than three anchor nodes
,whereas the proposed method uses only two nodes
to approach the TN. (b) Estimation of DoA based on
RSSI. Transmitter hunting is an activity in which par-
ticipants use radio-direction-finding techniques to lo-
cate one or more radio transmitters hidden within a
designated search area(Harker, 2008). Note that gen-
eral wireless devices supporting ad-hoc communica-
tion use non directional antennas. The hardware used
in transmitter hunting differs from that used in ad-hoc
communication. (c) Movement based on RSSI. We
review studies about using mobile robots for search
and rescue. Such mobile robots approach a TN us-
ing sensor nodes. The mobile robot moves randomly
from P
1
and stops at one of P
2
, P
3
, P
4
or P
5
that is
closer to the TN than P
1
. The movement tracking and
points P
2
· · · P
5
are defined by the initial distance d
to the TN, and the moving distance is (1/2)d. The
mobile robot moves to this node by heuristic move-
ment following RSSI-based distance estimation, and
which is repeated(Li et al., 2012). In the literature(Li
et al., 2012), the stopping of movement and change in
moving direction are determined by the difference in
RSSI-based distance estimation, however, no protec-
tion feature is used.
As described above, the related work is described
from three perspectives. These studies use trilatera-
tion for distance estimation, directional antennas to
determine radio direction, and heuristic movementac-
cording to RSSI-based distance estimation. There-
fore, these methods differsfrom the proposed method,
which employs the protection feature.
3 PROPOSAL METHOD
3.1 Overview
Since RSSI values vary with the environment, the
calibration of RSSI propagation model(Mao et al.,
2007) or filtering to remove unwanted components
(noise)(Pathirana et al., 2005) and the communica-
tion distance is required. This study employ an ap-
proaching method that uses approach/departuredeter-
mination based on varying RSSI values from wireless
devices with non directional antennas. The proposed
method does not use calibration or filtering to mea-
sure RSSI or estimate communication distance. It is
difficult to determine approach/departure depending
using RSSI strength. The PSN as a protection feature
is implemented for approach/departuredetermination.
When the protection feature is used and the departure
is determined N times in a row, the moving direction
changes. Approach/departure are determined by de-
creasing and increasing RSSI values, respectively, N
times of the PSN in a row, while the MN moves in
a straight line from a to c. Then, the moving direc-
tion is changed at b
′
when determining approach us-
ing approach/departure determination. An overview
is shown in Fig. 1. With this method, incorrect ap-
proach/departure determination is prevented and the
probability of determining an incorrect moving direc-
tion is reduced. We evaluate an MN approachinga TN
using the PSN according to approach/departuredeter-
mination through computer simulation. The notations
used in this paper are described in Table 1.
3.2 Assumption
The MN assumes a general wireless node that imple-
ments IEEE 802.11b and supports ad-hoc communi-
cation. It is assumed that a non directional antenna
is employed by the MN. In addition, the MN has the
following capabilities.
• RSSI measurement
• Moving distance measurement
• Moving direction control
Approaching a Target using a Protection Feature based on Received Signal Strength Indicator
171
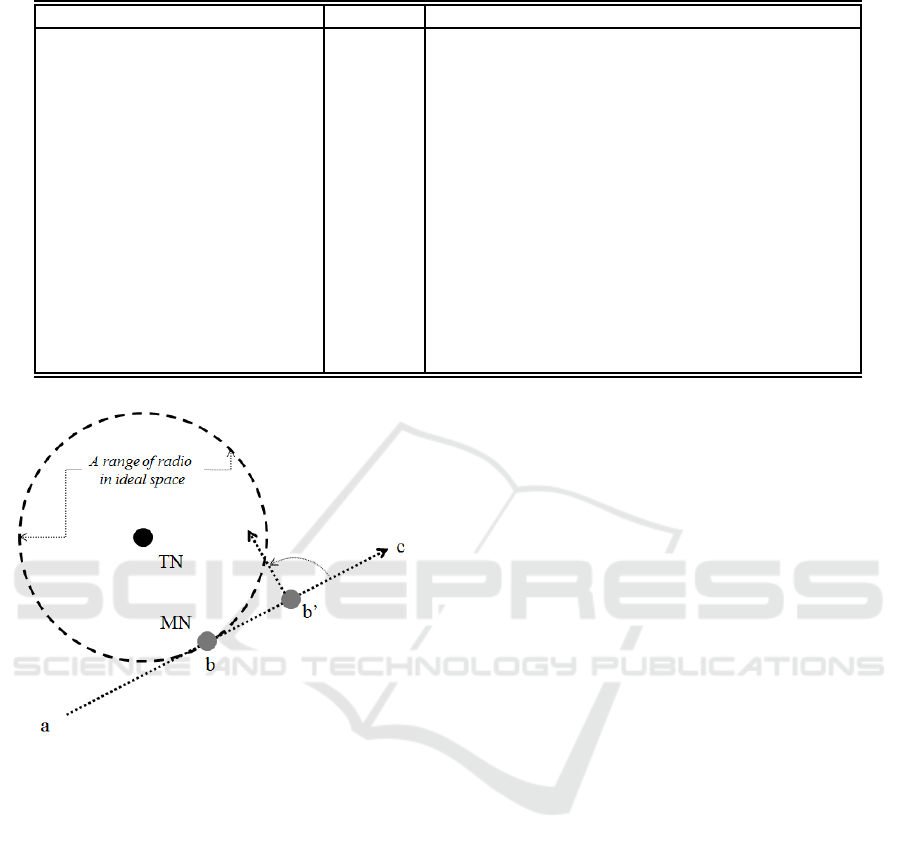
Table 1: Notations.
Name Notation Description
Mobile Node MN Node approaching TN
Target Node TN Node approached by MN
Step width sw Distance of one step
Maximum number of step times limax Maximum number of step times in one trial
RSSI P
i
RSSI at i (i = 0,1, 2, 3,···)
SRSSI SP
i
Smoothed RSSI at i
Reference value Ref
rssi
Value to compare with P
i
Moving direction control amount mangle Amount of change in the moving direction
Protection Step Number PSN Protection feature to determine
Threshold limen Distance from TN to end the approach
Decreasing counter Counter
D
Increment when P
i
is decreased compared to Ref
rssi
(Counter
D
= 0,1,2,3, · · ·)
Increasing counter Counter
I
Increment when P
i
is increased compared to Ref
rssi
(Counter
I
= 0,1,2,3, · · ·)
Significance level α Value for significance test
Figure 1: Overview of approach/departure determination.
The TN has the same functions and sends a beacon
signal to the MN periodically.
3.3 Details
Here, we describe the TN based on RSSI using ap-
proach/departure determination. The approach proce-
dure for the MN is described below. Fig. 2 shows a
flowchart that describes the approach process.
1. [i+ +] Update i.
2. [MeasureRSSI(P
i
)] The MN measures RSSI (P
i
)
at i from the TN.
3. [Set Re ference RSSI] When starting the approach,
P
i
becomes the reference value (Ref
rssi
).
4. [Define Protectionstepnumber] PSN (N) is set.
5. [Target Detection] Check whether the MN is
within limen. If the MN is within limen, the sim-
ulation ends.
6. [CompareRSSI] Compare P
i
to Ref
rssi
.
P
i
> Ref
rssi
(Approach) →
Counter
D
= 0
Counter
I
+ +
P
i
< Ref
rssi
(Departure) →
Counter
D
+ +
Counter
I
= 0
P
i
= Ref
rssi
(Unknown) →
Counter
D
= 0
Counter
I
= 0
7. [U pdateRef
rssi
] Compare each counter with N
of the PSN. When Count
D
≥ N or Count
I
≥ N,
Ref
rssi
is updated and both counters are reset as
follows.
Counter
D
= 0
Counter
I
= 0
Then, Re f
rssi
is selected as the minimum P
i
be-
tween the current location (t + N − 1) and the
location starting the counting (t) of Count
D
or
Count
I
. In order to prevent from occurring ap-
proach determination frequently, the minimum
RSSI is selected.
Ref
rssi
= min{P
t
,P
t+1
,...., P
t+N+1
} (1)
8. [Changedirection] Execute the change in moving
direction. The moving direction control amount
(mangle) is 0 when Count
D
< N or Count
I
< N.
mangle is π/2 when Count
D
≥ N. mangle is 0
when Count
I
≥ N because the MN is approach-
ing the TN. The MN moves in a counterclockwise
direction.
9. [Move] Move sw as a single step. One direction is
selected when the approach process begins.
10. Repeat 1).
ICORES 2016 - 5th International Conference on Operations Research and Enterprise Systems
172
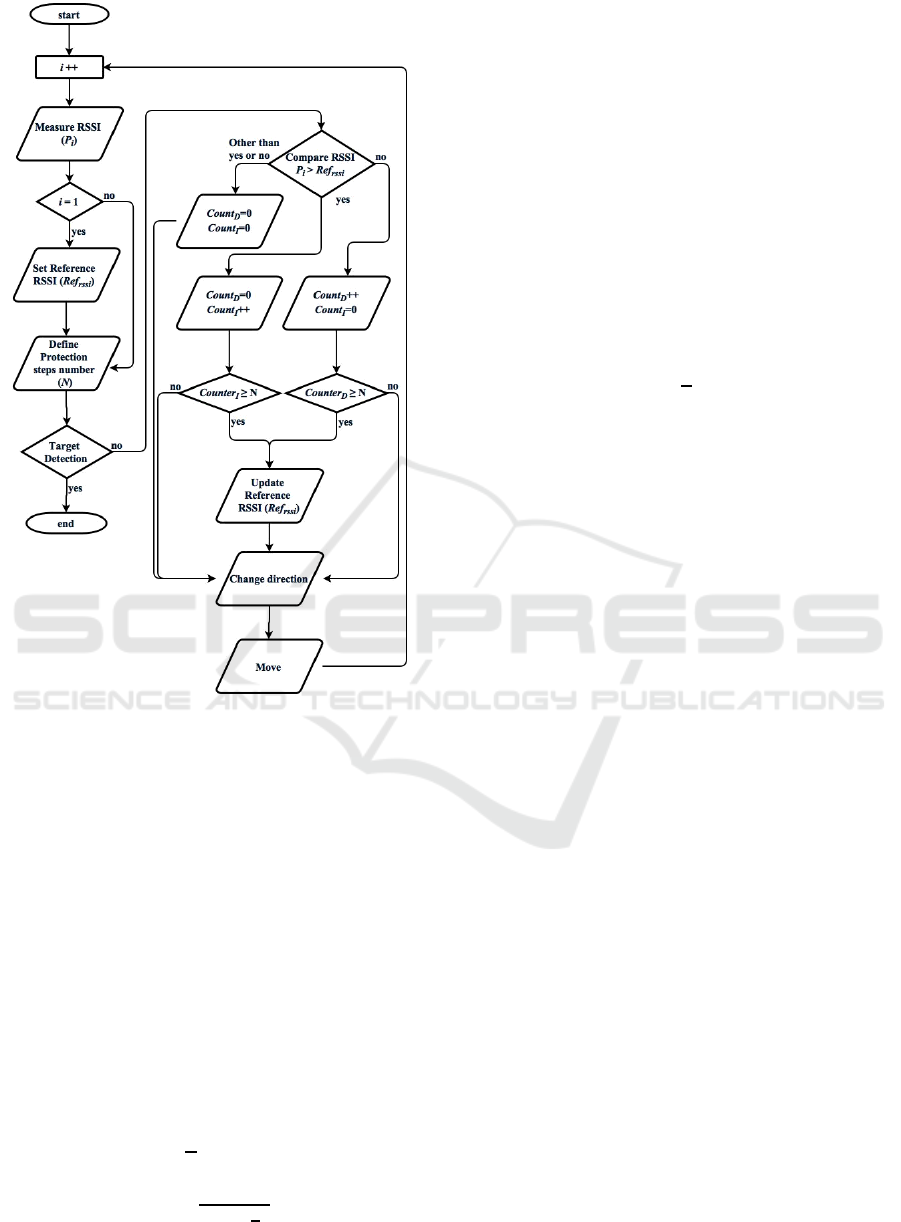
Figure 2: Flowchart of approach in processing for MN.
3.3.1 PSN in Approach/Departure
Determination
The purpose of approach/departure determination is
to determine whether the MN moving toward or away
from the TN according to the measured RSSI at each
step. The MN compares P
i
and Ref
rssi
to determine
the magnitude relation.
The MN moves a single step and the probability
of determining the MN is approaching or departing is
1/2 when comparing RSSI to Ref
rssi
. We assume that
the MN determines approach or departure N times se-
quentially and the PSN is N. The formula to calculate
probability is
1/2
N
, and the significance level (α)
is used, which is the probability of rejecting the null
hypothesis. Thus, N is the minimum integer value.
1
2
N
< α
N >
log
10
(α)
log
10
(
1
2
)
(2)
Note that α is set to 0.05 and then N becomes 5.
Due to varying RSSI values caused by environ-
mental conditions, we assume that the deviation of
RSSI is used for the PSN. This deviation is obtained
as the mean deviation while the MN moves. The
mean deviation (MD
i
) at i is obtained from P
i
and
the smoothed RSSI (SP
i
) at i. Then MD
i
is changed
to SD
i
because the mean deviation is nearly equal to
1.25× standarddeviation(Jacobson, 1988), SD
i
[dB]
can be obtained by MD
i
in mW which is converted
from dBm.
MD
i
[dB] = |P
i
[dBm] − SP
i
[dBm]| (3)
SD
i
[dB] = 10log
10
(0.8× MD
i
[mW]) (4)
SP
i
is obtained by the nth RSSI from P
i−n+1
to P
t
in
mW which is converted from dBm.
SP
i
[mw] =
1
n
i
∑
t=i−n+1
P
t
[mW] (5)
SP
i
[dBm] = 10log
10
(SP
i
[mw]) (6)
where n is the number of samples and i ≥ n − 1 is
satisfied. When i is less than n − 1, SP
i
= P
i
. In this
paper, the number of samples, n, is 3.
Here, we consider two PSNs. One is a fixed value,
which is calculated statistically, and the other is based
on the deviation of RSSI, which can be obtained while
the MN moves. Thus, the PSN is an integer value
selected as the maximum value of the two PSNs at i.
Note that the PSN is defined as N1 as follows.
N1 ← max{SD
i
,5} (7)
We determine the approach to the TN when P
i
in-
creases from Re f
rssi
N1 times in a row, and we deter-
mine departure from the TN when P
i
decreases from
Ref
rssi
N1 times in a row. It is expected that N1 pre-
vent incorrect determination from the varied P
i
, i.e.,
the measured RSSI value.
3.3.2 Moving Direction Control
The moving direction control controls the moving di-
rection according to the approach/departure determi-
nation. To increase the possibility of encountering the
TN, the movement trajectory of the MN is a spiral box
search, i.e., mangle is 0 or π/2 in a counterclockwise
direction.
4 RESULT
Here, we evaluate the performance of the proposed
method through computer simulation based on the
PSN (Eq.(7)). First, we compare the incorrect ap-
proach determination rate using the PSN (P
i
com-
pared to Ref
rssi
), not using the PSN (P
i
compared to
Approaching a Target using a Protection Feature based on Received Signal Strength Indicator
173
P
i−1
) and using the PSN (SP
i
compared to Ref
rssi
) to
evaluate the PSN of N1. For approaching using the
PSN with SP
i
, Ref
rssi
is selected as the minimum SP
i
rather than P
i
in Eq.(1). We then show the erroneous
decision rate of approaching, the average MN moving
distance, and the ratio between the average MN mov-
ing distance and the direct distance between the start
point and the target relative to the start point.
4.1 Computer Simulation
The proposed model is evaluated by computer simula-
tion which deals with the plane on which MN and TN
are allocated and move. In addition, RSSI, which can
be obtained during wireless communication, is simu-
lated. RSSI is measured at i and is denoted by P
i
.
4.1.1 Plane of Approach
The plane of approach is a two-dimensional lattice in
the x − y plane. The distance between the lattices is
0.5 [m]. The MN and TN are positioned on this x− y
plane, and it is assumed that there are no obstacles
between these nodes.
4.1.2 MN
The MN moves at a constant speed to adjacent lattice
points on the left, right, top or bottom of the x − y
plane. At each lattice point the MN determines P
i
from the TN.
4.1.3 TN
The TN is located on at the origin (0, 0) at x− y plane
and does not move.
4.1.4 Radio Propagation Model
The TN transmits signals such as a beacon sig-
nal, and the MN measures P
i
. The radio propaga-
tion model uses a generic model, i.e., the variations
in RSSI follow a log-normal distribution(Rappaport
et al., 1996)(Fall and Varadhan, ).
P
i
[dBm] ∼ N (
¯
P
i
[dBm],σ
2
i
) (8)
¯
P
i
[dBm] = P
0
[dBm] − 10· γ· log
10
d
d
0
(9)
Here, P
i
[dBm] is RSSI measured at i and
¯
P
i
[dBm]
is the average RSSI at i. σ
2
i
is the variance, i.e., the
varied measurements of RSSI, and N (
¯
P
i
[dBm],σ
2
i
)
indicates a log-normal distribution of
¯
P
i
and σ
2
i
. P
0
[dBm] is RSSI at reference distance d
0
[m], and d
0
[m] is 1 [m]. Thus, P
0
using a free space model(Friis,
1946) (frequency: 2.4 [GHz], transmitting power: 10
[mW](Porcino and Hirt, 2003), antenna gain: 1) as -
30.05 [dBm]. d [m] is communication distance, and
γ is the path loss exponent. It is assumed that d and
γ are unknown parameters in the MN and TN. The
parameters used in Eq.(8) are listed in Table 2.
Table 2: RSSI parameters.
σ
2
i
Variance 3
2
, 6
2
, 9
2
, 12
2
[dB]
P
0
RSSI -30.05 [dBm]
at reference distance
d
0
Reference distance 1 [m]
γ Path loss exponent 2
Table 3: Simulation parameters.
Parameter Using PSN Unused PSN
sw 0.5 [m] 0.5 [m]
limax 5000 [times] 5000 [times]
limen 5 [m] 5 [m]
N1 max(SD
i
,5) Not used
mangle 0 or π/2 0 or π/2
4.1.5 Threshold to Terminate Approaching
It is assumed that the TN can be confirmed visually
when the MN approaches it within a certain threshold.
When the MN approaches the TN within the thresh-
old, the approach is terminated.
4.2 Simulation Setup
The proposed method was evaluated using Visual
C++ 2013. In this simulation, an MN and a TN were
positioned on the plane of approaching. The MN
started from the following start points respectively:
in x− y plane, {x,y}={100,100}, {90,90}, {80,80},
{70, 70}, {60, 60}, {50,50}, {40, 40}, {30,30},
{20, 20}. This is a range that the MN can receive the
signal from the TN in roughly maximum -100 [dBm].
The TN is allocated at the origin (0, 0) at x − y
plane and the TN is fixed.
Table 3 used in the simulation. The simulation
was performed 100 times for each starting point.
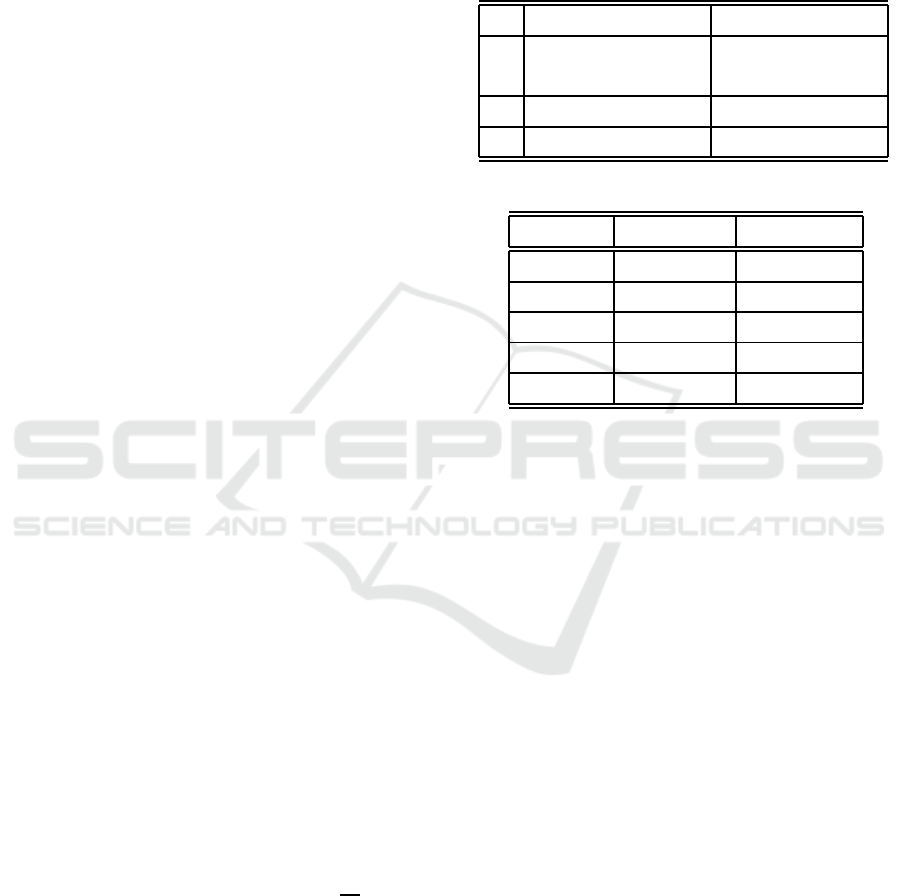
4.3 Results with and without PSN
The simulation was performed with and without the
PSN (Section 4). Figure 3 shows the erroneous de-
cision rate of approach with using the PSN (P
i
com-
pared to Re f
rssi
per σ
2
in Eq.(8)), and Fig. 4 shows
ICORES 2016 - 5th International Conference on Operations Research and Enterprise Systems
174
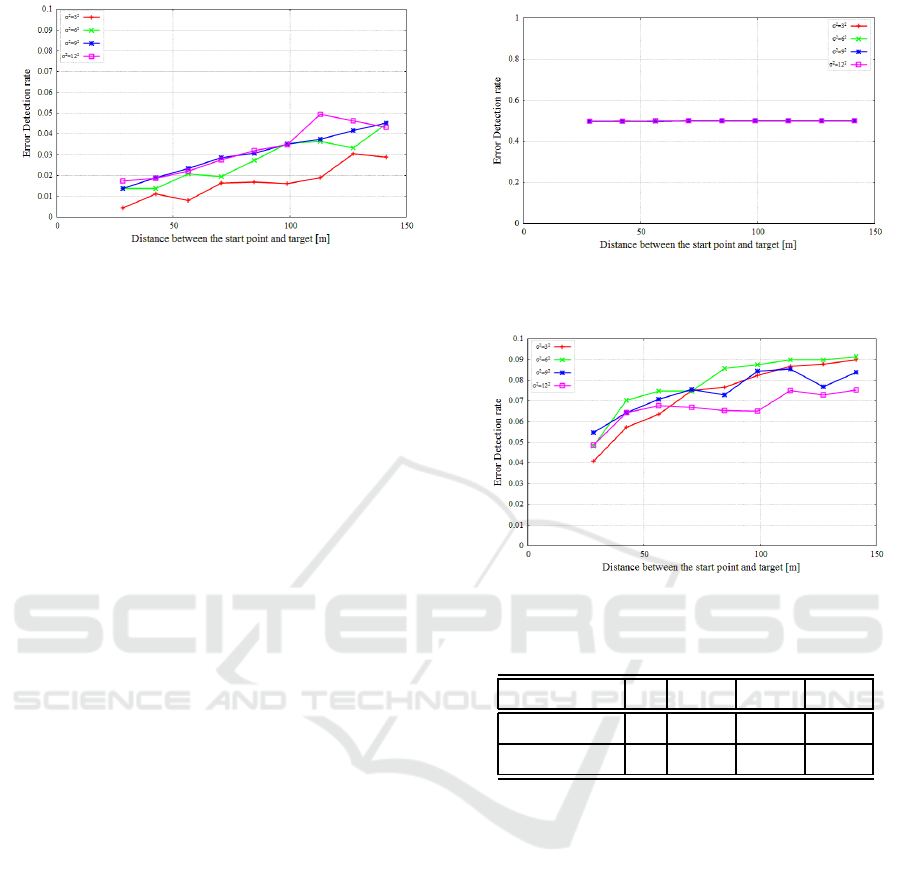
Figure 3: Erroneous decision rate of approach with the PSN
with P
i
compared to Ref
rssi
.
the erroneous decision rate of approach without the
PSN (P
i
compared to P
i−1
per σ
2
in Eq.(8)). Figure
5 shows the erroneous decision rate of approach us-
ing PSN (SP
i
compared to Ref
rssi
per σ
2
in Eq.(8)).
In these figures, the horizontal axis is the distance be-
tween the start point and the target [m] and the vertical
axis is the error determination rate. As can be seen,
the erroneous decision rate of approach using the PSN
with P
i
is less than 0.05. This result was expected
because the PSN was set to the maximum value in
this simulation, i.e., either SD
i
of the deviation or α
of significance level is 0.05. The erroneous decision
rate of approach without the PSN was approximately
0.5, and the erroneous decision rate of approach with
the PSN with SP
i
was approximately 0.05 to 0.1. Ap-
proaching without the PSN is whether the approach or
departure was determined by compared to P
i−1
mea-
sured at a previous step. For approaching using the
PSN with SP
i
rather than P
i
, the erroneous decision
rate increases. Next, the approach failure rate with
and without the PSN were compared. The results per
σ
2
in Eq.(8) are shown in Table 4. If the MN could
not enter limen within limax, the attempt was con-
sidered a failure. The failure rate was computed as
(failed attempts/total attempts) per σ
2
. All attempts
with the PSN were successful, and the failed attempts
occurred without the PSN.
This result indicates that the PSN of N1 prevented
incorrect determination for an MN when the determi-
nation is based on RSSI. Hereafter, approach with the
PSN using P
i
is considered and is referred to as ”ap-
proach with the PSN”.
In the next section, we evaluate the approach with
the PSN.
4.4 Average Moving Distance
The average MN moving distance is shown per σ
2
in
Eq.(8) in Fig. 6. In the figure, the horizontal axis is
the distance between the start point and the target [m]
and the vertical axis is error average moving distance
Figure 4: Erroneous decision rate of approach without the
PSN with P
i
compared to P
i−1
.
Figure 5: Erroneous decision rate of approach with the PSN
with SP
i
compared to Ref
rssi
.
Table 4: Failure rate of approach with and without the PSN.
σ
2
3
2
6
2
9
2
12
2
Using PSN 0 0 0 0
Unused PSN 7 24.67 39.78 47.89
Unit: [%]
[m]. As the start point becomes closer to the TN, the
moving distance decreases, and we can confirm that
the moving distances has a proportionate relationship
to the distance between the start point and the target.
In the next section, the relationship between mov-
ing distance and the distance between the start point
and the target is described.
4.5 Ratio between Moving Distance and
Distance between Start Point and
Target
The ratio of average moving distance to the distance
between the start point and the target is shown per σ
2
in Eq.(8) in Fig. 7. In the figure, the horizontal axis is
the distance between the start point and the target [m]
and the vertical axis is the ratio between the moving
distance and the distance between the start point and
Approaching a Target using a Protection Feature based on Received Signal Strength Indicator
175
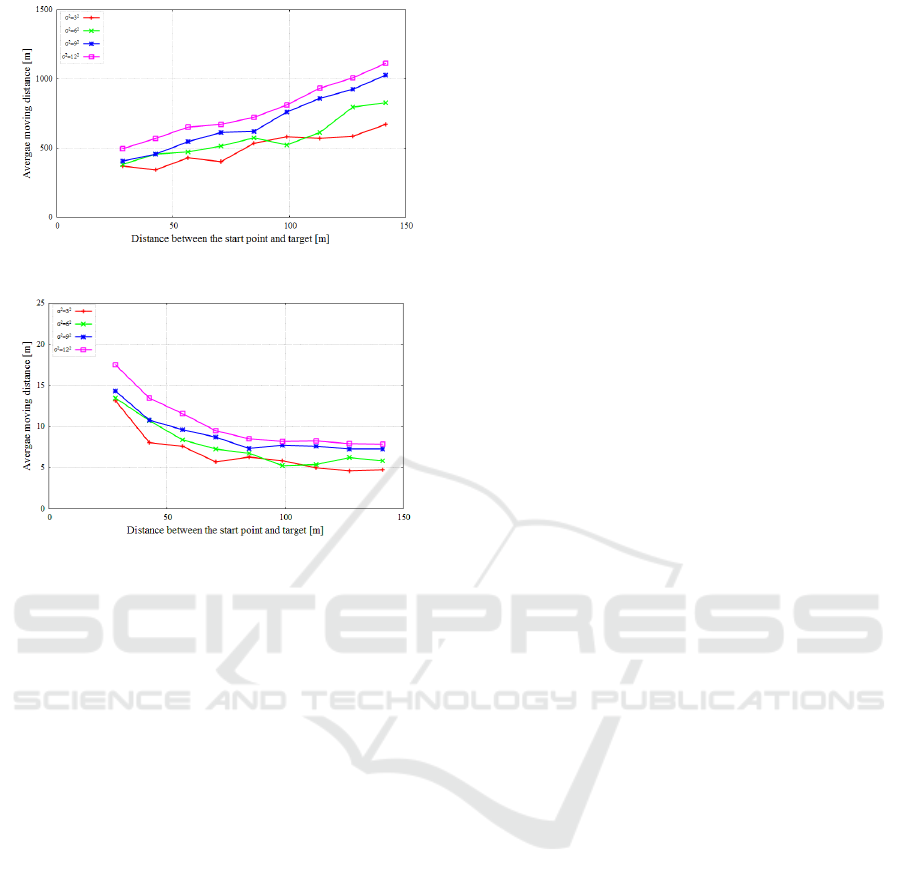
Figure 6: Average MN moving distance.
Figure 7: Ratio between moving distance and the distance
between the start point and target.
the target. As the start point comes closer to the TN,
this ratio increases to be greater than 10. As can be
seen, the MN could approach the TN efficiently when
the MN started at a point that was distant from the
TN.
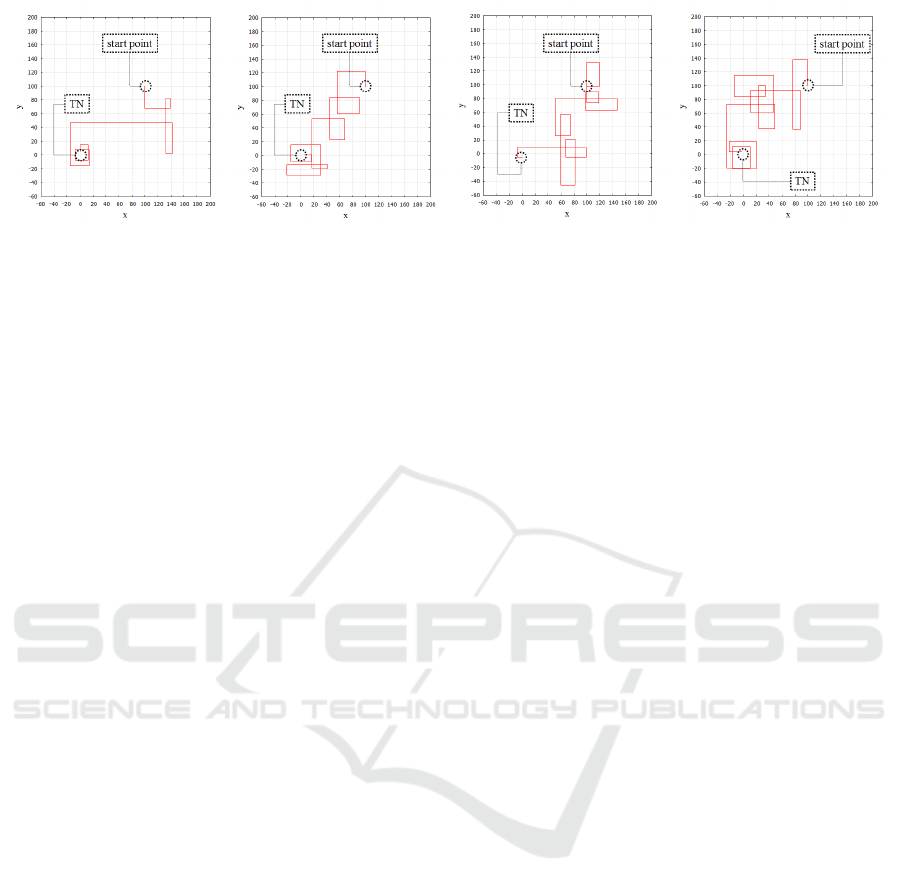
4.6 Movement Locus
Example of movement loci of the averagemoving dis-
tance when the MN approached per σ
2
in Eq.(8) are
shown in Fig. 8. In these samples, the MN started
from {x,y} = {100,100} on the x− y plane.
5 DISCUSSION
As shown in Table 4, the MN could enter limen and
approach the TN when the PSN is used. We identi-
fied that using PSN reduced the probability of incor-
rect approach determination (Fig 3 and 4). The PSN
was designed as a protection feature to determine the
approach to or departure from the TN. The value of
PSN varied depending on the environment. The PSN
should be small if the environment is favorable, e.g.,
σ
2
in Eq.(8). In fact, the failure rate of σ
2
equal to 3
2
was the least, which is confirmed in Table 4. There-
fore, the PSN was designed to use the value obtained
by testing α at 0.05 and SD
i
considering the environ-
ment, and the maximum PSN value was selected from
the two. Thus, the PSN of N1 was a variable value,
which chose the maximum value of 5 or SD
i
. The
MN could successfully approach the TN within limen
when using N1; thus, we can confirm that the moving
distances demonstrate a proportionate relationship to
the distance between the start point and the target, as
shown in Fig. 6. On the other hand, when the MN
approached the TN, the MN demonstrated a moving
distance of approximately 6 ∼ 7 times he distance
between the start point and the target when the start
point was more distant from the TN. However, the
MN demonstrated a moving distance approximately
10 times greater when the start point was close to the
TN than when the start point was distant from the
TN, as shown in Fig. 7. This is a limitation of us-
ing a PSN of N1; however, this result shows that ap-
proach/departure determination works well with the
PSN values based on varying RSSI value.
6 CONCLUSION
In this paper, we have proposed an ap-
proach/departure determination method based
on varying RSSI values. The proposed method was
evaluated using computer simulation. A key concept
of this method is the use of a PSN as a protection
feature. The PSN was implemented to determine
approach/departure and was set to a maximum value
of either SD
i
of the deviation or α of the significance
level as 0.05. In our evaluation, an MN and a TN were
positioned on an x − y plane with two-dimensional
lattice. The moving direction changed when de-
parture was determined, and remained unchanged
when approach was determined. As a result, we can
confirm that the MN could successfully enter into
limen (i.e., a distance threshold), which means that
the MN approached the TN when the PSN was used.
In the future, we plan to device a method for
approach/departure determination that considers ge-
ographical and environment conditions during a nat-
ural disaster. The primary study target is wireless de-
vices, which communicates directly; however, it can
be expected approach in the wide-area by using ad-
hoc communication because numerous wireless de-
vices can collaborate to increase the range of commu-
nication. In addition, a quicker approach can be ex-
pected because of collaboration among a greater num-
ber of wireless devices.
ICORES 2016 - 5th International Conference on Operations Research and Enterprise Systems
176
(a) σ
2
= 3
2
(b) σ
2
= 6
2
(c) σ
2
= 9
2
(d) σ
2
= 12
2
Figure 8: Examples of MN’s movement loci.
REFERENCES
ˇ
Capkun, S., Hamdi, M., and Hubaux, J.-P. (2002). Gps-
free positioning in mobile ad hoc networks. Cluster
Computing, 5(2):157–167.
Carr, J. J. (1993). Directional or omnidirectional antenna.
Joe Carr’s Receiving Antenna Handbook, Hightext.
Fall, K. and Varadhan, K. The ns manual. notes
and documentation on the software ns2-simulator.
https://www.isi.edu/nsnam/ns, 2002.
Friis, H. T. (1946). A note on a simple transmission for-
mula. proc. IRE, 34(5):254–256.
Harker, K. W. (2008). What You Need to Get Started in
ARDF. Amateur Radio Direction Finding in Texas,
http://www.texasardf.org/.
Jacobson, V. (1988). Congestion avoidance and control.
In ACM SIGCOMM computer communication review,
volume 18, pages 314–329. ACM.
Li, X., Mitton, N., Simplot-Ryl, I., and Simplot-Ryl, D.
(2012). Dynamic beacon mobility scheduling for sen-
sor localization. Parallel and Distributed Systems,
IEEE Transactions on, 23(8):1439–1452.
Mao, G., Anderson, B. D., and Fidan, B. (2007). Path loss
exponent estimation for wireless sensor network lo-
calization. Computer Networks, 51(10):2467–2483.
Mase, K. and Sakata, S. (2007). AdHoc Networks and
Mesh Networks. Corona publishing CO., LTD. (In
Japanese).
Niculescu, D. and Nath, B. (2001). Ad hoc positioning sys-
tem (aps). In Global Telecommunications Conference,
2001. GLOBECOM’01. IEEE, volume 5, pages 2926–
2931. IEEE.
Niculescu, D. and Nath, B. (2003). Ad hoc position-
ing system (aps) using aoa. In INFOCOM 2003.
Twenty-Second Annual Joint Conference of the IEEE
Computer and Communications. IEEE Societies, vol-
ume 3, pages 1734–1743. IEEE.
Pathirana, P. N., Bulusu, N., Savkin, A. V., and Jha, S.
(2005). Node localization using mobile robots in
delay-tolerant sensor networks. Mobile Computing,
IEEE Transactions on, 4(3):285–296.
Porcino, D. and Hirt, W. (2003). Ultra-wideband radio tech-
nology: potential and challenges ahead. Communica-
tions Magazine, IEEE, 41(7):66–74.
Priyantha, N. B., Miu, A. K., Balakrishnan, H., and Teller,
S. (2001). The cricket compass for context-aware mo-
bile applications. In Proceedings of the 7th annual in-
ternational conference on Mobile computing and net-
working, pages 1–14. ACM.
Rappaport, T. S. et al. (1996). Wireless communications:
principles and practice, volume 2. prentice hall PTR
New Jersey.
Stevens, S. S. (1946). On the theory of scales of measure-
ment.
Toh, C. K. (2001). Ad hoc mobile wireless networks: pro-
tocols and systems. Pearson Education.
Approaching a Target using a Protection Feature based on Received Signal Strength Indicator
177
