
SDfR - Service Discovery for Robots
Stefan-Gabriel Chitic
1
, Julien Ponge
2
and Olivier Simonin
1
1
Universit
´
e de Lyon, INSA-Lyon, INRIA, CITI, F-69621, Villeurbanne, France
2
Universit
´
e de Lyon, INSA-Lyon, CITI, F-69621, Villeurbanne, France
Keywords:
Robotic Fleet, Service Discovery, Service Oriented Architecture.
Abstract:
Multi-robots systems require dedicated tools and models for their design and the deployment. Our approach
proposes service-oriented architecture that can simplify the development and deployment. In order to solve
the problem of neighbors and service discovery in an ad-hoc network, the fleet robot needs a protocol that
is able to constantly discover new robots in its coverage area. To this end we propose a robotic middleware,
SDfR, that is able to provide service discovery. This protocol is an extension of the Simple Service Discovery
Protocol (SSDP) used in Universal Plug and Play (UPnP) to dynamic networks generated by the mobility of
the robots. Even if SDfR is platform independent, we propose a ROS (ROS, 2014) integration in order to
facilitate the usage. We evaluate a series of overhead benchmarking across static and dynamic scenarios. We
also present some use-cases where our proposal was successfully tested.
1 INTRODUCTION
Nowadays more and more robotic systems tend to be
composed of several robots moving and cooperating,
generally called fleets of robots. They are able to per-
form one or multiple tasks together and to share in-
formation about complex missions.
One of the problems in developing multi-robot ap-
plications is the communication inside the fleet. The
robots need to know the reachable peers in any type
of communication infrastructure. In an ad-hoc net-
work, this problem becomes challenging because the
robots are highly mobile. A fleet can easily partition
or merge with another fleet. Also single robots can
become isolated or join an existing fleet.
There is a great need of having a suitable middle-
ware that can abstract the neighbor and service dis-
covery layer and offer high-level application inter-
faces (APIs) to robotic applications. The challenge
is to provide an adapted system that can offer a suit-
able mechanism for network configuration. Second,
this mechanism needs to maintain a list of connected
peers and their services in a highly mobile scenario.
In this paper we propose a new service discov-
ery middleware, called SDfR (Service Discovery for
Robots), an extension of the Simple Service Discov-
ery Protocol (SSDP) used in Universal Plug and Play
(UPnP). SDfR is able to make an auto-configuration
for the connectivity to the fleet ad-hoc network, dis-
cover reachable neighbors and their services. We also
provide a ROS integration node, simplifying the us-
age of SDfR.
The paper is structured as follows: Section 2
presents the background of service orientated archi-
tecture and discovery in multi-robot systems, Sec-
tion 3 discusses the service discovery approaches in
middleware for robotics, Section 4 presents our pro-
posal for service discovery in a fleet context, Section
5 presents the arhitecture and the implementation of
SDfR, Section 6 presents the main results of over-
head benchmarking and Section 7 describes a couple
of use-cases. Section 8 concludes the paper.
2 MOTIVATION
One problem of robotic fleets is how functionalities
can be applied to make the collaboration between
peers easier. Robots in fleet system that perform
a mission together need to communicate with other
peers. The communication can be done using a cen-
tralized node or directly using an ad-hoc network.
Robotic Applications as Services. In our vision,
robots need to advertise their functionalities as ser-
vices in order to allow other members of the fleet to
interact with them. In network based applications,
236
Chitic, S-G., Ponge, J. and Simonin, O.
SDfR - Service Discovery for Robots.
DOI: 10.5220/0005755202360243
In Proceedings of the 8th International Conference on Agents and Artificial Intelligence (ICAART 2016) - Volume 1, pages 236-243
ISBN: 978-989-758-172-4
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

service-oriented programming is now a largely ac-
cepted principle (Issarny et al., 2011).
Service-oriented architecture greatly simplifies
the implementation of highly-adaptive, constantly-
evolving applications (Fr
´
enot et al., 2010). It also re-
duces the process of developing and deploying new
robotic applications. This architecture is very suit-
able to quickly cope with new developing models and
requirements.
In order to increase the mobility of the robots and
to distribute the communication without having a cen-
tral node, there is a need for the communication to be
decentralized using ad-hoc networks. In this case, the
robots do not have any image of their neighbors. Fur-
thermore, the communication across peers is suscep-
tible to route change and different peers can be used
to relay a data package. The ad-hoc network becomes
the sum of peer to peer network with 2 robots at least.
Fleet Service Discovery. In order to solve the prob-
lem of neighbors and service discovery in an ad-hoc
network, a fleet robot needs a protocol that is able to
constantly discover new robots in its coverage area,
while maintaining a neighbor connectivity quality in-
dicator. Since there is not any central node that can
manage IP address allocation, the protocol should be
able to negotiate an IP address inside the network
and to have a conflict management tool in case of
an IP collision. Our work focuses on ad-hoc multi-
robot systems communication, especially on a family
of middleware that accelerates the development and
the deployment of new robotic applications.
3 RELATED WORK
In this section we present some of the major middle-
wares in robotics as well as some of existing service
discovery protocols used in the field.
3.1 Middleware for Robotics
All aspects of communication, application deploy-
ment and configuration can be facilitated using a
proper middleware. The biggest difference between
a classical middleware that runs in a cloud central-
ized infrastructure and a robotic one, is the mobility
of the fleet and the decentralization of its components.
An exhaustive survey of the existing middlewares for
robot contexts is clearly impossible because of the
large number of existing middleware and frequent re-
leases of new ones. A detailed survey can be found
in (Chitic et al., 2014). Most of the middlewares are
designed for mono-robot with little applicability in
multi-robot systems.
One of the first middleware that emerged for
robotics is Player/Stage (Kranz et al., 2006) project
which is designed to provide an infrastructure, drivers
and a collection of dynamically loaded device-shared
libraries for robotic applications. It neither offers a
service orientated architecture, nor a discovery for
neighbors services system.
Another highly used middleware for robotics is
ROS (Robot operating system). It is a recent flexi-
ble middleware for robot applications (Quigley et al.,
2009; Cousins et al., 2010; ROS, 2014). It is a col-
lection of tools, libraries, and conventions that aim to
simplify the task of creating complex and robust robot
behavior across a wide variety of robotic platforms. It
provides hardware abstraction, device drivers, visual-
izers, message-passing, package management.
ROS (ROS, 2014) seems to be the emerging mid-
dleware for mono-robot with the most potential to
become the most used framework for robotic fleets.
However, it has no multi-robot coordination system
and no automated testing environment, but it has al-
ready the advantage of having a large community that
develops new packages for it.
To the best of our knowledge, none of the existing
middleware for robots provides a service discovery
mechanism. ROS internal repository is represented
as an internal node designed for internal service dis-
covery, but it does not support neighbors discovery.
3.2 Service Discovery and Robotics
Classical protocols and middlewares for service dis-
covery in distributed environments like data-grids,
clouds or even smart environments have a central-
ized or decentralized registry that manages service
description. Decentralized systems (e.g UPnP (Ahn
et al., 2005), Jini (Pereira et al., 2011) or SLP
(Romero et al., 2010)) can be a purely distributed so-
lution where each node stores its own service repos-
itories or a hybrid solution that includes super-nodes
that aggregate information from other peers.
Another way to see a fleet of robots is like a
service-oriented multi-agent system. Such environ-
ments like Peer-to-Peer (P2P), Multi-Agent Systems
(MAS) or Service-Oriented Environments (SOE) tend
to approach the problem of service discovery in a cen-
tralized, distributed or decentralized way. Central-
ized mechanisms like super-peers (Gummadi et al.,
2002), middle-agents (Klusch et al., 2006) or cen-
tral registries (Rompothong and Senivongse, 2003)
are limited in number of agents in the system and
in terms of the number of requests. They also use
SDfR - Service Discovery for Robots
237

a centralized node which can have serious impact if
the central point becomes unreachable. Distributed
approaches such as Distributed Hash Tables (DHT)
(Maymounkov and Mazieres, 2002) offer more scal-
ability and robustness by having multiple specific
nodes that can manage the resources. Decentralized
systems consider all the nodes to be equal. This ap-
proach provides more flexibility, but it has its down-
sides, since each node has only a partial view of the
entire system. As mentioned in (del Val et al., 2014),
an interesting way to discover service inside a decen-
tralized and self-organized multi-agent system is to
use homogeneity between agents.
In the robotic world, an approach for service dis-
covery in centralized networks is to use classical Uni-
versal Plug and Play (UPnP) protocol. Since the con-
cept of having the robotic tasks and processes as ser-
vices is not mature yet, the main focus of research on
service discovery in robotics is oriented towards the
integration with the environment, like smart homes or
smart cities. Reference (Borja et al., 2013) provides a
case study of integration of service robots and smart-
homes via UPnP. In these cases, the authors are not
referring to a robot as part of a specific fleet, but as
part of an environment, in which the robot is consid-
ered as an entity that can offer services.
The solutions presented above have their down-
sides when applied to ad-hoc multi-robot systems.
Firstly, due to the mobility of the robots, the network
connection is highly instable and robots can discon-
nect and reconnect very often. Existing protocols do
not perform the same way in a highly dynamic en-
vironment and in a static one. As mentioned in (Is-
sarny et al., 2011), the challenge is to set the trade-off
between physical mobility and scalability. Secondly,
existing protocols are not very adaptive. The discov-
ery protocol should be ready to be used at any time
and track its usage and failures. Existing protocols
like UPnP, have a limited memory factor and when the
connection is timed-out, the discovery process reini-
tializes itself at reconnection.
Next sections present our extension of SDP used
in UPnP in order to overcome the limitation of exist-
ing service discovery approaches.
4 SERVICE DISCOVERY FOR
ROBOTICS
Our main goal is to propose a mechanism that allows
highly mobile robots to keep track of the reachable
peers inside a fleet while using an ad-hoc infrastruc-
ture. This mechanism should also be able to provide a
list of services available on each peer. Another objec-
tive is to propose a network configuration negotiation
protocol. Due to the mobility of robots, classical peer
to peer network configuration techniques are not suit-
able.
In this section we present the general description
of our service discovery protocol for robotic applica-
tions, called SDfR (Service Discovery for Robots).
4.1 SDfR vs SSDP
We propose a protocol that does not flood the net-
work and provides an already seen memory feature
built-in. SDfR protocol aims to be a dynamic, adap-
tive and scalable protocol. For this purpose we based
our approach on Simple Service Discovery Proto-
col (Goland et al., ) (SSDP) from UPnP. SDfR also
aims to provide service discovery with the smart-
environment in which the robots are being deployed.
In order to limit the network usage for the service
discovery process, SDfR sends most of the internal
messages in multicast, avoiding the overhead gener-
ated by unicast transmission in order to propagate the
same message. In addition, to avoid failure in case
of a disconnection due to the movement of the robots
outside the coverage area, all the communications are
done using UDP (User Datagram Protocol). Further-
more, to limit the network flooding when the protocol
needs information from just one robot, a second trans-
mission is enabled in unicast mode. SDfR does not
need to reinitialize the entire discovery protocol when
the connection is lost, because it disposes of a history
map of all the already seen robots and their services.
In order to avoid services that are out of reach
(e.g. service of robots that are present in the history
map but are not present in the covered communica-
tion area), a connection indicator is computed for each
robot represented by the success rate of pinging the
connected peers.
The main similarities between SSDP and SDfR are:
Multicast Transmissions. In order to avoid the over-
head of retransmitting the same unicast message,
most of the internal messages are multicast.
HTTP-style Messages. The messages that are being
sent use an HTTP-style structure composed of
headers and a body.
The main differences between SSDP and SDfR are:
Limited Multicast Transmissions. To avoid failure
in case of a disconnection due to the movement of
the robots outside the coverage area, all the com-
munications in SDfR are done using UDP (User
Datagram Protocol) and only in request model.
Unicast Transmissions. To limit the network flood-
ing when the protocol needs information from just
ICAART 2016 - 8th International Conference on Agents and Artificial Intelligence
238

one robot, a second transmission mechanism is
enabled in unicast mode in SDfR.
History Map. SDfR does not need to reinitialize the
entire discovery protocol when the connection is
lost, because it disposes of a history map of all the
already seen robots and their services. In order to
avoid services that are out of reach (e.g service of
robots that are present in the history map but are
not present in the covered communication area), a
connection indicator is computed for each robot.
4.2 Protocol Description
We designed our protocol as a finite state timed au-
tomaton. A detailed description of the design process
and the model validation is out of the scope of this
paper.
Each protocol method has at least one type of mes-
sage that resides inside the request payload. A sample
execution of the communications is illustrated in Fig-
ure 1. Two methods representing the desired action
of a request are used in SDfR : M-SEARCH and NO-
TIFY.
The M-SEARCH method is used for discovery re-
quests to get the list of near by members and their ser-
vices. The message type associated with this method
is Discovery.
The other method, NOTIFY is used to respond
to a Discovery request or to inform the others about
changes in the current state of the robot. The message
types associated with this method are: Update, Alive
and Byebye.
• The Update message is sent as a response to a Dis-
covery request or when the current services or ca-
pacities of the robot change.
• The Alive message is sent recurrently, as a beacon,
in order to inform the others about the presence
of the robot. The beacon sending rate can be set
depending on the services need. The default value
is at 10s.
• The Byebye message is sent when the robot stops
gracefully, in order to inform the others about its
disappearance.
5 ARCHITECTURE OF SDFR
In this section we zoom in on the architecture and fea-
tures embedded in SDfR by presenting its implemen-
tation as a service.
5.1 SDfR Architecture
Service Discovery for Robots is developed as a ser-
vice itself. The service-oriented architecture ap-
proach for robotic software development is not very
widely used in the robotic community. The practice
in this community is to develop built-in libraries in
order to extend software features.
R1 R2 Rn
…
Discovery
Discovery
Update
Update
Alive
Alive
Alive
Byebye
Byebye
……
………
Figure 1: Sample execution of SDfR communications.
The main advantage of having a service-oriented
architecture is the compatibility with other robotic
services developed in different programming lan-
guages and running over different operating systems.
This is a critical feature for a heterogeneous robotic
fleet.
Furthermore, SDfR service can run separately of
the other processes on the robot and all the messages
are consumed by instances of the service on multiple
robots. If it fails, it would not affect the other services
running on the robot. This sand-boxing also ensures
that the information sent by the protocol is not cor-
rupted by any other third-parties.
SDfR service is composed of two layers as shown
in Figure 2: an API layer that communicates with
other services and a Discovery Protocol layer. Each
layer has an independent life-cycle and communi-
cates internally via a shared memory. The API layer
responds to requests independently from the lower
layer, using the information from the shared mem-
ory. The lower discovery protocol layer is in charge of
communication with the other SDfR nodes on an elas-
tic number of robots in order to discover the reachable
peers and their services.
RESTful Communication API. A Representa-
tional State Transfer (Fielding, 2000) (RESTful) web-
service was chosen for the API. It lets other services
communicate with SDfR service because it is based
on normal HTTP requests which enables intent to
be inferred from the type of request being made and
is completely stateless. All the responses are JSON
messages.
SDfR - Service Discovery for Robots
239

API
Discovery protocol
Internal data
Applications
Other SDfR nodes on an
elastic number of robots
Independent lifecycles
n robotic services
m peers
Figure 2: SDfR service architecture.
Ad-hoc Configuration Management. Since the
fleet is operating in an ad-hoc infrastructure, the peers
need to be able to negotiate and auto-configure their
network configuration. A robotic fleet ad-hoc net-
work is different from a classic ad-hoc hot-spot be-
cause the robots are highly dynamic and the network
can be partitioned or merged. The mobility of the
peers needs to be taken into consideration in the ne-
gotiation protocol of the configuration. SDfR service,
based on a simple configuration file, is able to au-
tomatically connect to an ad-hoc network. The se-
cured WiFi SSID network is composed using the fleet
id. This mechanism allows to have multiple fleets
of robots in the same network space. Moreover, the
robots can auto assign IP addresses. The standard net-
work space is 10.<fleet id>.<x>.<y>, where x and
y are computed by each robot from its internal MAC
address in order to avoid IP conflict (Thomson et al.,
2007). Furthermore, if an IP conflict happens, the ser-
vice has a mechanism to trigger an IP change on the
robots. This mechanism is available all the time since
an IP conflict can be triggered by a merge of 2 sub-
networks.
5.2 ROS Integration
In order to make SDfR service user friendly, we have
created a ROS node that communicates with SDfR
service and can be used by other nodes via topics and
services. When the node starts, it launches a instance
of SDfR if it is not running and then it provides sup-
port for other ROS nodes to publish or unpublish their
services and their capacities. Furthermore, our ROS
node provides the neighbors list of services and is ca-
pable of allowing other ROS applications to search for
a specific service with a specific configuration.
A producer node can publish its services or capac-
ities in an asynchronous way using ROS topics be-
cause we consider that the registration is not highly
bound to time. The same concept applies for the un-
publish commands and for getting the list of neigh-
bors. On the other hand, the search command for a
specific neighbor and their services needs to be done
in synchronous way using ROS services because the
behaviors of the consumer node is depending on it.
6 EVALUATION
In the evaluation we want to measure what is the over-
load generated by the usage of SDfR in a robotic fleet
context. Another objective is to see the impact of us-
ing text-plain protocol in the upper and the lower layer
of the SDfR service. In this section we present the
main results of resource overhead for SDfR.
Figure 3: Turtlebots in the experimentation hall of CITI-
Lab.
SDfR was benchmarked in two types of contexts:
• a static scenario where the robots do not move to
evaluate the overhead in an ideal Wi-Fi communi-
cation scheme
• a real dynamic scenario (see Figure 3) where
robots are moving and transmission can drop.
In both scenarios all peers should discover their
neighbors and in the the second one, the neighbors
discovery depends on the distance between peers.
The benchmarks were performed on Turtlebot 2
robots equipped with an Intel Core 2 Duo, 2.1 GHz
CPU, 4Gb of Ram PC running on Ubuntu 13.04
Each test run was given 5 minutes to collect the
data. In our test runs we used simulated services that
try to register/subscribe into SDfR. We simulate three
type of actions:
1. Publish. We simulate new service providers that
try to publish with a delay time of 10 seconds. In
order to simulate publishers, we used an Apache
server on each robot that responds to the auto-
discovery URL of each publisher.
2. Unpublish. Each of the already published service
providers could be unpublished with a random de-
lay between 5 seconds.
3. Subscribe. We generate separated threads for
each consumer. Each thread will constantly re-
ICAART 2016 - 8th International Conference on Agents and Artificial Intelligence
240

quest the table of neighbors from SDfR, in order
to stress at maximum our protocol.
In the static scenario we considered different num-
bers of robots: 2, 4, 6. Each robot had a total number
of service providers and service consumers equal to
100 simulated services. For each number of robots
we used different ratios between providers and con-
sumers: 30%, 50% and 70% publishers.
In the dynamic test-case we used for each variant
of SDfR 6 robots with a number of 100 simulated ser-
vices per robot. 70% of the services on each robot
were publishers. The robots moved randomly in a
200 square meters room with poles and other obsta-
cles. The room (see Figure 3) was exposed to Wi-Fi
interferences from other networks that occupy all of
the 2.4Ghz channels.
Figure 4: Average request time in SDfR.
6.1 Overhead Evaluation
A robotic application that provides a service for the
fleet needs to register with SDfR. This must be done
as fast as possible in order to avoid blocking the ser-
vice when it starts. Another important overhead mea-
sure is the time of unregister request. This happens
whenever a producer wants to remove itself from the
SDfR registry. One of the most important metric for
robotics application from a latency point of view is
the time to request the list of neighbors and their ser-
vices. In a real scenario, a producer registers once for
its life-time cycle, but a consumer may request multi-
ple times the list of reachable neighbors and services.
The subscription response time can have a impact on
the time to complete a fleet task.
Figure 4 reveals the resulting time consumed by a
service to publish or unpublish its service or get the
neighbors services in the static and dynamic scenar-
ios. In the dynamic scenario (Figure 4), the latency
is higher but the difference from the static scenario is
less than 30%. This can be explained by the increase
in computation load on robots generated by the mo-
bility of the fleet. All the request times remain in a
certain variation interval even if the number of robots
increases. The publish request takes from 95ms to
130ms, the unpublish request varies between 98ms to
122ms and the subscribe request is less than 5ms.
Figure 5: CPU and Memory usage.
6.2 CPU and Memory Usage Evaluation
In robotic applications, the computation power is crit-
ical. Fleet of robots are heterogeneous and can in-
clude different types of robots with different compu-
tational factor. Having a low CPU consumption dis-
covery service, benefits the other processes involved
in performing the fleet mission. Besides the CPU us-
age, another critical resource in fleets of robots is the
memory. As an example, robotic fleets may include
visual sensors like 3D cameras which are in high de-
mand of memory. A service discovery protocol needs
to have a low usage of the robot memory.
Figure 5 presents our results for % of CPU and
Memory used. CPU consumption varies between
2.2% to 2.8% of CPU usage. We observe that the CPU
usage is higher for the dynamic scenario because the
CPU time is consumed by the mobility management
and the number of CPU slots is less for other pro-
cesses. We can also say that the CPU usage increases
with the number of robots in the fleet with a rate of
maximum 1% per robot. The memory usage is less
than 0.3% (out of 4GB) and seems to remain constant
even if the number of robots increases.
6.3 Latency Evaluation
In a fleet context the communication between peers in
ad-hoc network are very sensitive. The transmissions
can be unreliable due to the mobility of the robots.
This is why the network overhead needs to be as lim-
ited as possible in order to allow services to exchange
information. Our measurements include the average
of transmitted and received bytes per robot in a test
run of 5 minutes. To increase the quality of our mea-
SDfR - Service Discovery for Robots
241
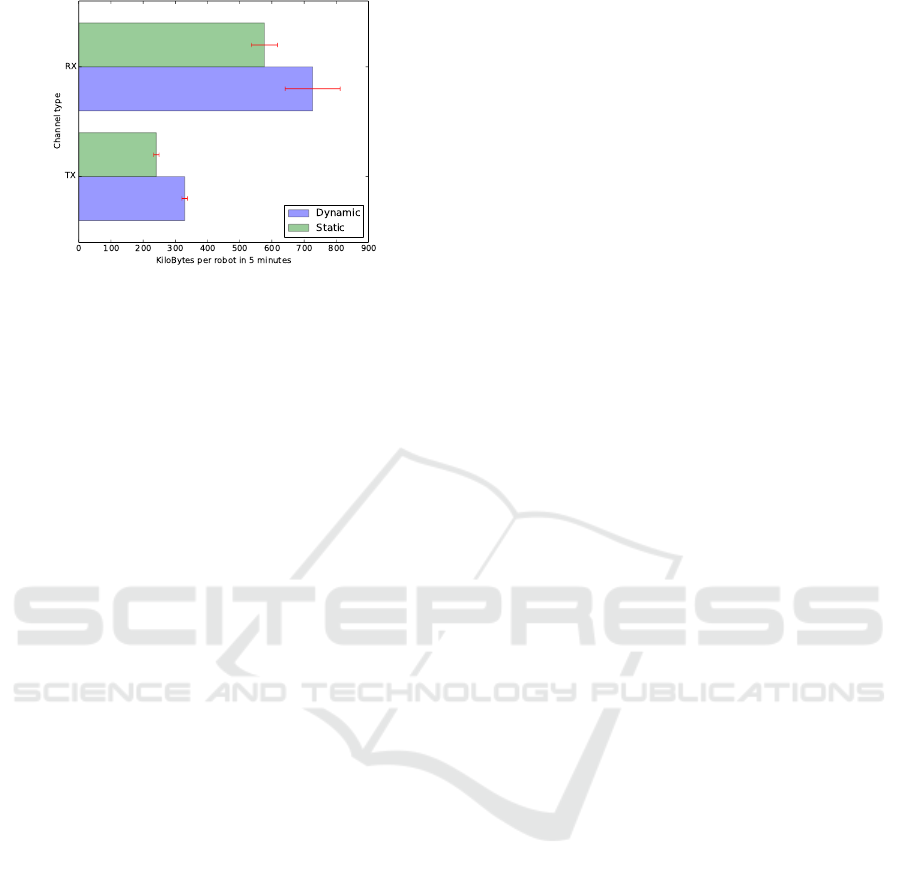
Figure 6: Transmitted and Received bytes per robot in 5
min.
surements we use intermediary check-points for each
metric at each 10 seconds.
Figure 6 presents the quantity of transmitted (TX)
and received (RX) kilobytes per robot. The number
of bytes varies from 220 kilobytes to 320 kilobytes
for the transmitted bytes and from 540 kilobytes to
850 kilobytes for received bytes. This remains very
limited considering the time of 5 minutes.
Conclusion. Our results show that SDfR is low la-
tency brick, with a small overhead on CPU and mem-
ory that has a low network consumption. Moreover,
the increase in number of robots in a fleet do not
have a big impact on SDfR overhead. Being inte-
grated with ROS makes SDfR a good asset in man-
aging neighbors and service in multi-robot context.
7 USE-CASES
This section presents use-cases where SDfR and ser-
vice oriented architecture were applied. These two
use-cases are being studied in an ongoing project:
‘CROME - Multi-view multi-robot scene understand-
ing and fleet coordination’ (Matignon et al., 2014).
But the applicability of SoA and SDfR is larger than
the examples presented below.
In general, we can use services in any robotic ap-
plication that need to perform one or multiple tasks at
once by having multiple nodes that manage different
pars of hardware layers. In multi-robot context, SDfR
can be used to simply discover the peers in our com-
munication zone and avoid overloading the network
with broadcasts or messages for unreachable robots.
Furthermore SDfR provides a list of available services
on each peer, thus a robot can decide if it can relay on
a peer to perform together a task.
7.1 Peer-to-Peer Monitoring in a Fleet
This scenario consists in having a fleet of robots per-
forming a mission in a decentralized network. The
environment is big enough to make direct communi-
cation between all peers impossible.
In these condition, a monitor station cannot have
a global image of what is happening in the fleet. In
order to provide the monitor with information about
each robot status, status messages and alerts need to
be routed in a peer to peer context to the monitoring
station.
In this case, on each robot inside the fleet, ser-
vices are represented by the nodes that manage the
hardware elements of each robot and that expose their
status. In addition, a peer to peer monitoring service
is present. It collects the data from other nodes and
analyzes it in order to trigger alarms if necessary.
SDfR is used for all the hardware nodes to register
in order to be discovered by the monitoring service.
The monitoring service first registers itself into SDfR
and then it gets constantly the lists of available service
on the robot. In addition, this service uses SDfR to
discover the peers that are in the communication area.
The peer-to-peer monitoring service searches for
the neighbors with an instance of this same service.
If it finds one, it routes in a state-less connection all
the data from its nodes to the neighbor. It also tries
to build a communication route for alert to get in a
state-full environment to the monitoring station.
7.2 Complex Scene Observation by
Robotic Fleet
This scenario consists in having a fleet of robots ob-
serving a complex scene using multiple sensors in or-
der to have a better observation. Combing the percep-
tion of each robot, the fleet has a better vision of the
scene. The robots need to move in order to maximize
the observation of the scene. In a particular case, the
fleet observe the pose of a human and his joints.
In this case, on each robot we have a node that
gets the sensor perception, a node that manages the
movement of the robot and a upper AI layer service
that decides if the robot needs to move in order to
maximize the vision.
SDfR is used by the AI layer to discover the move-
ment node and the perception node. Furthermore,
SDfR is used to search for the other reachable peers
in the fleet. Using SDfR allows an elastic number of
robots to participate in the fleet in this type of mission.
ICAART 2016 - 8th International Conference on Agents and Artificial Intelligence
242

8 CONCLUSION
In this paper we presented the challenges to make a
service discovery protocol for robot fleet systems. We
discussed the limited applicability of existing service
discovery protocols in the context of robot fleets and
then, we proposed a new protocol called SDfR that
is suitable for service discovery inside an ad-hoc net-
worked fleet.
The evaluation results shows that SDfR API gen-
erates a small latency and the SDfR service has a
small impact on the CPU and memory used. Further-
more, SDfR has a low bandwidth consumption in both
static and dynamic scenarios. Base on our bench-
marking, we believe that SDfR can provide neigh-
bor and service discovery for multi-robot applications
without stressing the system. ROS integration and ad-
hoc network auto-connect features facilitate the usage
of SDfR.
We intend to further use SDfR in our current
approach of improving the families of middleware
to facilitate the development of multi-robot systems.
SDfR can be used as part of bigger systems like re-
mote application deployment environment in ad-hoc
robotic network where robots can be dynamically pro-
visioned with new applications while remaining in
operation environment. SDfR can also be used to
monitor the running services on each robot. We are
also interested in opportunities for SDfR not just for
robotics but also in other fields like mobile wireless
sensor networks.
REFERENCES
Ahn, S. C., Kim, J. H., Lim, K., Ko, H., Kwon, Y.-M., and
Kim, H.-G. (2005). Upnp approach for robot middle-
ware. In Robotics and Automation, 2005. ICRA 2005.
Proceedings of the 2005 IEEE International Confer-
ence on, pages 1959–1963. IEEE.
Borja, R., de la Pinta, J.,
´
Alvarez, A., and Maestre, J.
(2013). Integration of service robots in the smart home
by means of UPnP: A surveillance robot case study.
Robotics and Autonomous Systems, 61(2):153 – 160.
Chitic, S., Ponge, J., and Simonin, O. (2014). Are middle-
wares ready for multi-robots systems? In Simulation,
Modeling, and Programming for Autonomous Robots
- 4th International Conference, SIMPAR 2014, Berg-
amo, Italy, October 20-23, 2014, pages 279–290.
Cousins, S., Gerkey, B., Conley, K., and Garage, W. (2010).
Sharing software with ros [ros topics]. Robotics &
Automation Magazine, IEEE, 17(2):12–14.
del Val, E., Rebollo, M., and Botti, V. (2014). Enhanc-
ing decentralized service discovery in open service-
oriented multi-agent systems. Autonomous Agents and
Multi-Agent Systems, 28(1):1–30.
Fielding, R. (2000). Representational state transfer. Ar-
chitectural Styles and the Design of Netowork-based
Software Architecture, pages 76–85.
Fr
´
enot, S., Le Mou
¨
el, F., Ponge, J., and Salagnac, G. (2010).
Various Extensions for the Ambient OSGi framework.
In Adamus Workshop in ICPS, Berlin, Allemagne.
Goland, Y. Y., Cai, T., Leach, P., and Albright, S. Simple
service discovery protocol. RFC 2026.
Gummadi, P. K., Saroiu, S., and Gribble, S. D. (2002). A
measurement study of napster and gnutella as exam-
ples of peer-to-peer file sharing systems. ACM SIG-
COMM Computer Communication Review, 32(1):82–
82.
Issarny, V., Georgantas, N., Hachem, S., Zarras, A., Vas-
siliadist, P., Autili, M., Gerosa, M. A., and Hamida,
A. B. (2011). Service-oriented middleware for the
future internet: state of the art and research direc-
tions. Journal of Internet Services and Applications,
2(1):23–45.
Klusch, M., Fries, B., and Sycara, K. (2006). Automated
semantic web service discovery with owls-mx. In
Proc. of the fifth international joint conference on Au-
tonomous agents and multiagent systems, pages 915–
922. ACM.
Kranz, M., Rusu, R. B., Maldonado, A., Beetz, M.,
and Schmidt, A. (2006). A player/stage system for
context-aware intelligent environments.
Matignon, L., Chitic, S., and Simonin, O. (2014). Cooperat-
ing in a group of mobile robots to identify the human
skeleton model. http://youtu.be/5kmxIgLEerQ.
Maymounkov, P. and Mazieres, D. (2002). Kademlia: A
peer-to-peer information system based on the xor met-
ric. In Peer-to-Peer Systems, pages 53–65. Springer.
Pereira, A., Costa, N., and Ser
ˆ
odio, C. (2011). Peer-to-peer
Jini for truly service-oriented WSNs. International
Journal of Distributed Sensor Networks, 2011.
Quigley, M., Conley, K., Gerkey, B., Faust, J., Foote, T.,
Leibs, J., Wheeler, R., and Ng, A. Y. (2009). Ros: an
open-source robot operating system. In ICRA work-
shop on open source software, volume 3.
Romero, D., Rouvoy, R., Seinturier, L., and Carton, P.
(2010). Service discovery in ubiquitous feedback con-
trol loops. In Distributed Applications and Interoper-
able Systems, pages 112–125. Springer.
Rompothong, P. and Senivongse, T. (2003). A query fed-
eration of uddi registries. In Proc. 1st international
symposium on Information and communication tech-
nologies, pages 561–566. Trinity College Dublin.
ROS (2014). Robot operating system. http://www.ros.org/.
Thomson, S., Narten, T., and Jinmei, T. (2007). Ipv6 state-
less address autoconfiguration. RFC 4862.
SDfR - Service Discovery for Robots
243
