
Learning Models of Human Behaviour from Textual Instructions
Kristina Yordanova and Thomas Kirste
University of Rostock, 18051 Rostock, Germany
Keywords:
Precondition-effect Rules, Models of Human Behaviour, Natural Language Processing, Activity Recognition.
Abstract:
There are various activity recognition approaches that rely on manual definition of precondition-effect rules to
describe human behaviour. These rules are later used to generate computational models of human behaviour
that are able to reason about the user behaviour based on sensor observations. One problem with these ap-
proaches is that the manual rule definition is time consuming and error prone process. To address this problem,
in this paper we propose an approach that learns the rules from textual instructions. In difference to existing
approaches, it is able to learn the causal relations between the actions without initial training phase. Further-
more, it learns the domain ontology that is used for the model generalisation and specialisation. To evaluate
the approach, a model describing cooking task was learned and later applied for explaining seven plans of
actual human behaviour. It was then compared to a hand-crafted model describing the same problem. The re-
sults showed that the learned model was able to recognise the plans with higher overall probability compared
to the hand-crafted model. It also learned a more complex domain ontology and was more general than the
hand-crafted model. In general, the results showed that it is possible to learn models of human behaviour from
textual instructions which are able to explain actual human behaviour.
1 INTRODUCTION
Assistive systems support the daily activities and al-
low even people with impairments to continue their
independent life (Hoey et al., 2010). Such systems
have to recognise the user actions and intentions,
track the user interactions with a variety of objects,
detect errors in the user behaviour, and find the best
way of assisting them (Hoey et al., 2010). This can
be done by activity recognition (AR) approaches that
utilise human behaviour models (HBM) in the form
of rules. These rules are used to generate probabilistic
models with which the system can infer the user ac-
tions and goals (Kr
¨
uger et al., 2014; Hiatt et al., 2011;
Ramirez and Geffner, 2011). Such types of models
are also known as computational state space mod-
els (CSSM) (Kr
¨
uger et al., 2014). They treat activ-
ity recognition as a plan recognition problem, where
given an initial state, a set of possible actions, and a
set of observations, the executed actions and the user
goals have to be recognised (Ramirez and Geffner,
2011). These approaches rely on prior knowledge
to obtain the context information needed for building
the user actions and the problem domain. The prior
knowledge is provided in the form of precondition-
effect rules by a domain expert or by the model de-
signer. This knowledge is then used to manually build
a CSSM. The manual modelling is however time con-
suming and error prone (Nguyen et al., 2013; Kr
¨
uger
et al., 2012).
To address this problem, different works propose
the learning of models from sensor data (Zhuo and
Kambhampati, 2013; Okeyo et al., 2011). One prob-
lem these approaches face is that sensor data is ex-
pensive (Ye et al., 2014). Furthermore, sensors are
sometimes unable to capture fine-grained activities
(Chen et al., 2012), thus, they might potentially not
be learned.
To reduce the need of domain experts and / or sen-
sor data, one can substitute them with textual data
(Philipose et al., 2004). More precisely, one can
utilise the knowledge encoded in textual instructions
to learn the model structure. Textual instructions
specify tasks for achieving a given goal without ex-
plicitly stating all the required steps. On the one
hand, this makes them a challenging source for learn-
ing a model (Branavan et al., 2010). On the other
hand, they are usually written in imperative form,
have a simple sentence structure, and are highly or-
ganised. Compared to rich texts, this makes them a
better source for identifying the sequence of actions
needed for reaching the goal (Zhang et al., 2012).
According to (Branavan et al., 2012), to learn a
model of human behaviour from textual instructions,
Yordanova, K. and Kirste, T.
Learning Models of Human Behaviour from Textual Instructions.
DOI: 10.5220/0005755604150422
In Proceedings of the 8th International Conference on Agents and Artificial Intelligence (ICAART 2016) - Volume 2, pages 415-422
ISBN: 978-989-758-172-4
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
415

the system has to: 1. extract the actions’ semantics
from the text, 2. learn the model semantics through
language grounding, 3. and, finally, to translate it
into computational model of human behaviour for
planning problems. To address the problem of learn-
ing models of human behaviour for AR, we extend
the steps proposed by (Branavan et al., 2012). We add
the need of 4. learning the domain ontology that is
used to abstract and / or specialise the model. Further-
more, we consider computational models for activ-
ity recognition as the targeted model format, as they
represent the problem in the form of a planning prob-
lem and are able to reason about the human behaviour
based on observations (Hiatt et al., 2011; Ramirez and
Geffner, 2011).
In this work we concentrate on the problem of (1)
learning the precondition-effect rules that describe the
human behaviour; (2) learning the domain ontology
that describes the context information and its seman-
tic structure; and (3) the ability of the learned models
to explain real human behaviour in the form of plans.
2 RELATED WORK
There are various approaches to learning models of
human behaviour from textual instructions: through
grammatical patterns that are used to map the sen-
tence to a machine understandable model of the sen-
tence (Zhang et al., 2012; Branavan et al., 2012);
through machine learning techniques (Sil and Yates,
2011; Chen and Mooney, 2011; Kollar et al., 2014); or
through reinforcement learning approaches that learn
language by interacting with an external environment
(Branavan et al., 2012; Branavan et al., 2010; Kollar
et al., 2014).
Models learned through model grounding have
been used for plan generation (Li et al., 2010; Brana-
van et al., 2012), for learning the optimal sequence
of instruction execution (Branavan et al., 2010), for
learning navigational directions (Chen and Mooney,
2011), and for interpreting human instructions for
robots to follow them (Kollar et al., 2014; Tenorth
et al., 2010). To our knowledge, any attempts to ap-
ply language grounding to learning models for AR
rely on identifying objects from textual data and do
not build a computational model of human behaviour
(Perkowitz et al., 2004; Ye et al., 2014). This, how-
ever, suggests that models learned from text could
be used for AR tasks. AR here is treated as a plan
recognition problem, thus the plan elements have to
be learned. Existing approaches that learn human
behaviour from text make simplifying assumptions
about the learning problem, making them unsuitable
for more general AR problems. More precisely, the
preconditions and effects are learned through explicit
causal relations, that are grammatically expressed in
the text (Li et al., 2010; Sil and Yates, 2011). They
however, either rely on initial manual definition to
learn these relations (Branavan et al., 2012), or on
grammatical patterns and rich texts with complex sen-
tence structure (Li et al., 2010). They do not address
the problem of discovering causal relations between
sentences, but assume that all causal relations are ex-
pressed within the sentence (Tenorth et al., 2010).
They also do not identify implicit relations. However,
to find causal relations in instructions without a train-
ing phase, one has to rely on alternative methods, such
as time series analysis (Yordanova, 2015a). Further-
more, they rely on manually defined ontology, or do
not use one. However, one needs an ontology to deal
with model generalisation problems and as a means
for expressing the semantic relations between model
elements.
Moreover, there have been previously no attempts
at learning CSSMs from textual instructions. Exist-
ing CSSM approaches rely on manual rules defini-
tion to build the preconditions and effects of the mod-
els. For example, (Hiatt et al., 2011) use the cog-
nitive architecture ACT-R, a sub-symbolic produc-
tion system. It allows the manual description of ac-
tions in terms of preconditions and effects, while the
state of the world is modelled as information chunks
that can be retrieved from the memory of the system.
Other approaches rely on a PDDL
1
-like notations to
describe the possible actions (Ramirez and Geffner,
2011; Kr
¨
uger et al., 2013). Then, based on a set of
observations, the agent’s actions and goals are recog-
nised.
In this work we represent the learned CSSM in
a PDDL-like notation and use the learned model to
explain plans that describe actual human behaviour.
3 APPROACH
3.1 Identifying Text Elements of
Interest
To extract the text elements that describe the user ac-
tions, their causal relations to other entities and the
environment have to be identified. This is achieved
through assigning each word in a text the correspond-
ing part of speech (POS) tag. Furthermore, the depen-
dencies between text elements are identified through
dependencies parser.
1
Planning Domain Definition Language
ICAART 2016 - 8th International Conference on Agents and Artificial Intelligence
416

To identify the human actions, the verbs from the
POS-tagged text are extracted. We are interested in
present tense verbs, as textual instructions are usually
written in present tense, imperative form.
After identifying the actions, we extract any nouns
that are direct objects to the actions. These will be the
objects in the environment with which the human can
interact. Furthermore, we extract any nouns that are in
conjunction to the identified objects. These will have
dependencies to the same actions, to which the objects
with which they are in conjunction are dependent.
Moreover, any preposition relations such as in, on,
at, etc. between the objects and other elements in
the text are identified. These provide spacial or di-
rectional information about the action of interest. For
example, in the sentence “Put the apple on the table.”
our action is put, while the object on which the action
is executed is apple. The action is executed in the
location table identified through the on preposition.
Finally, we extract “states” from the text. The
state of an object is the adjectival modifier or the nom-
inal subject of an object. As in textual instructions
the object is often omitted (e.g. “Simmer (the sauce)
until thickened.”), we also investigate the relation be-
tween an action and past tense verbs or adjectives that
do not belong to an adjectival modifier or to nominal
subject, but that might still describe this relation. The
states give us information about the state of the envi-
ronment before and after an action is executed.
3.2 Extracting Causal Relations from
Textual Instructions
To identify causal relations between the actions, and
between states and actions, we use an approach pro-
posed in (Yordanova, 2015a). It transforms every
word of interest in the text into a time series and then
applies time series analysis to identify any causal re-
lations between the series. More precisely, each sen-
tence is treated as a time stamp in the time series.
Then, for each word of interest, the number of occur-
rences it appears in the sentence is counted and stored
as element of the time series with the same index as
the sentence index.
Generally, we can generate a time series for each
kind of word, as well as for each tuple of words. Here
we concentrate on those describing or causing change
in a state. That means we generate time series for all
actions and for all states that change an object.
To discover causal relations based on the gener-
ated time series, we apply the Granger causality test.
It is a statistical test for determining whether one
time series is useful for forecasting another. More
precisely, Granger testing performs statistical signifi-
cance test for one time series, “causing” the other time
series with different time lags using auto-regression
(Granger, 1969). The causality relationship is based
on two principles. The first is that the cause hap-
pens prior to the effect, while the second states that
the cause has a unique information about the fu-
ture values of its effect. Based on these assump-
tions, given two sets of time series x
t
and y
t
, we can
test whether x
t
Granger causes y
t
with a maximum
p time lag. To do that, we estimate the regression
y
t
= a
o
+ a
1
y
t−1
+ ... + a
p
y
t−p
+ b
1
x
t−1
+ ... + b
p
x
t−p
.
An F-test is then used to determine whether the lagged
x terms are significant.
3.3 Building the Domain Ontology
The domain ontology is divided into argument (ob-
ject) and action ontology. The argument ontology de-
scribes the objects, locations, and any other elements
in the environment that are taken as arguments in the
actions and predicates. The action ontology repre-
sents the actions with their arguments and abstraction
levels.
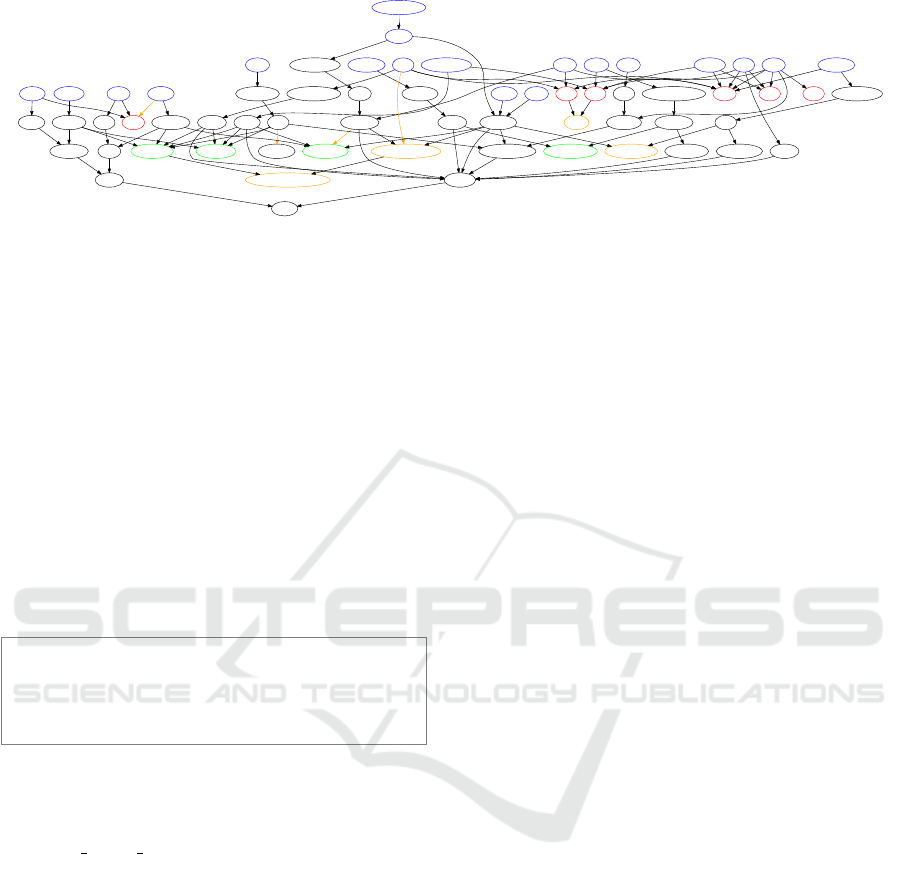
To learn the argument ontology, a semantic lex-
icon (e.g. WordNet (Miller, 1995)) is used to build
the initial ontology. As the initial ontology does not
contain some types that unify arguments applied to
the same action (see Fig. 1), the ontology has to be
extended. To do that, the prepositions with which
actions are connected to indirect objects are also ex-
tracted (e.g. in, on, etc.). They are then added to the
arguments ontology as parents of the arguments they
connect. In that manner the locational properties of
the arguments are described (e.g. water has the prop-
erty to be in something). During the learning of the
action templates and their preconditions and effects
(see Section 3.4), additional parent types are added
to describe objects used in actions that have the same
preconditions. Furthermore, types that are not present
in the initial ontology, but which objects are used only
in a specific action, are combined in a common par-
ent type. Fig. 1 shows an example of an argument
ontology and the learning process.
To learn the action ontology, the process for
building action ontology proposed in (Yordanova and
Kirste, 2015) is adapted for learning from textual
data. More precisely, based on the argument ontology,
the actions are abstracted by replacing the concrete ar-
guments with their corresponding types from an upper
abstraction level. In that manner, the uppermost level
will represent the most abstract form of the action.
For example, the sentence “Put the apple on the ta-
ble.” will yield the concrete action put apple table,
and the abstract action put object location. This
Learning Models of Human Behaviour from Textual Instructions
417
cutting-board
board
on
water-tap
regulatorsponge
material
soup
dish with
bottle
container
spoon
eating-utensil
glass
plate
tableware
fromin
cupboard
storage-space
wooden-spoon
stove
kitchen-appliance
pot
kitchen utensil
container-tableware
knife
cutting toolwater
liquid
carrot
vegetable
chair
seat
table
furniture
atto
counter sink
fixture
artefact
wash-objecttake-object put-object
entity
device
turn_on-objectsubstance
matter
food instrumentation container-area
ware
area
construction
appliance
commodity
utensil tool
wash-obj
on-in
container-tableware-take
Figure 1: Learning the argument ontology. Step 1 (blue): objects identified through POS-tagging and dependencies; step 2
(black): hierarchy identified through WordNet; step 3 (red): types identified through the relations of objects to prepositions;
step 4 (green): types identified based on similar preconditions; step 5 (yellow): types identified through action abstraction.
representation will later be used as a basis for the
precondition-effect rules that describe the actions.
3.4 Generating Precondition-effect
Rules
Having identified the actions, their causal relations,
and the domain ontology, the last step is the genera-
tion of precondition-effect rules that describe the ac-
tions and the way they change the world. The basis
for the rules is the action ontology. Each abstract ac-
tion from the ontology is taken and converted to an
action template that has the form shown in Fig. 2. Ba-
(:action pu t
:parameters (? o - ob j ect ? to - lo ca t i o n )
:precondition (and
(not ( e x e c u t e d - pu t ? o ? t o ) ) )
:effect (and
( e x e c u t e d - p ut ? o ?t o ) )
)
Figure 2: Example of an action template put in the PDDL
notation.
sically, the action name is the first part of the abstract
entity put object location, while the two parameters
are the second and the third part of the entity. Further-
more, the default predicate (executed-action) is added
to both the precondition and the effect, whereas in the
precondition it is negated.
Now the causal relations extracted from the text
are used to extend the actions. The execution of each
action that was identified to cause another action is
added as a precondition to the second action. For ex-
ample, to execute the action put, the action take has
to take place. That means that the predicate executed-
take ?o has to be added to the precondition of the ac-
tion put.
Furthermore, any states that cause the action are
also added in the precondition. For example, imag-
ine the example sentence is extended in the following
manner: “If the apple is ripe, put the apple on the ta-
ble.” In that case the state ripe causes the action put.
For that reason the predicate (state-ripe) will also be
added to the precondition.
This procedure is repeated for all available ac-
tions. The result is a set of candidate rules that de-
scribe a given behaviour.
As it is possible that some of the rules contradict
each other, a refinement step is added. This is done by
converting the argument ontology to the correspond-
ing PDDL format to represent the type hierarchy of
the problem. Then a concrete problem is manually
provided. It describes the initial state of the world
and the goal state to be reached. Later, the problem
as well as the rules and the type hierarchy are fed to a
general purpose planner and any predicates that pre-
vent the reaching of the goal are removed from the
preconditions.
4 EXPERIMENTAL SETUP
To evaluate the approach, textual instructions de-
scribing a kitchen experiment were used to generate
precondition-effect rules. The instructions were ob-
tained from the annotation of an activity recognition
experiment where a person prepares a carrot soup,
then serves the meal, has lunch, then cleans the table
(Kr
¨
uger et al., 2015; Kr
¨
uger et al., 2014). The instruc-
tions consisted of 80 sentences, with an average sen-
tence length of 6.1 words, and an average of 1 action
per sentence. The instructions were parsed with the
Stanford Parser to obtain the POS-tags and the depen-
dencies. They were then used as an input for identi-
fying the model elements and for generating the time
series. The time series were then tested for station-
arity by using the Augmented Dickey–Fuller (ADF)
t-statistic test. It showed that the series are already
stationary. The generated time series are available at
the University Library of the University of Rostock
(Yordanova, 2015b). Using the Granger causality test,
18 causal relations were discovered. They were then
used as an input for building the precondition-effect
ICAART 2016 - 8th International Conference on Agents and Artificial Intelligence
418

rules. Furthermore, WordNet was used to build the
initial argument ontology. It was later extended by
the proposed process and resulted in the ontology in
Fig. 1. The initial state and the goal were manually
defined and a planner (Yordanova et al., 2012) was
used to identify any rules that contradict each other.
The resulting model CSSM
l
was compared to a
hand-crafted model developed for the same problem
CSSM
m
. The reason for that was to evaluate the model
complexity in comparison to that of a model built by
a human expert.
Later, the models were used to recognise seven
plans, based on the video log from the cooking
dataset. Landmarks were used as action selection
heuristic (Richter and Westphal, 2010). This allowed
the computation of the approximate goal distance to
the goal. The actions in the plans were represented
according to the action schema learned in each of the
models. The plans were between 67 and 86 steps
long. Cohen’s kappa was calculated to determine the
plans’ similarity. The mean kappa was 0.18, which
indicates that the overlapping of the plans was low.
5 RESULTS
Table 1 provides information about the model dimen-
sions of both CSSM
l
and CSSM
m
. The model designer
in CSSM
m
identified 16 action classes. The learning
method in CSSM
l
discovered 15 action classes. That
is due to the fact that the action wait was introduces in
CSSM
m
. As this action was not present in the textual
instructions, it was not discovered in CSSM
l
. The ac-
tion wait, however, is causally unrelated to any of the
other actions so its presence did not change the causal
structure of the model.
Furthermore, CSSM
l
discovered 18 arguments in
the textual instructions, while the designer modelled
17 in CSSM
m
. This is due to the fact that in the tex-
tual instructions after the carrots are cooked, they are
transformed into a soup. Thus, soup is also an argu-
ment in the model. On the other hand, the system
designer decided to use the argument carrots also for
describing the soup. This shows that the approach is
able to learn also context information that is discarded
in the manual model.
CSSM
l
learned less operator (action) templates
and predicates than those modelled in CSSM
m
. On
the other hand, the rules resulted in smaller number
of ground operators and predicates in CSSM
m
than in
CSSM
l
. This indicates that CSSM
l
is more general
than CSSM
m
. This can be explained by the fact that
there are less restrictions in the form of predicates in
CSSM
l
than in CSSM
m
.
Table 1: Model parameters of CSSM
m
and CSSM
l
.
parameters CSSM
l
CSSM
m
action classes 15 16
operator templates 22 28
predicate templates 17 36
ground operators 189 110
ground predicates 204 160
arguments 18 17
max. arg. per template 2 3
ontology elements 66 41
ontology levels 7 5
states 46, 845, 389 10, 312
The model designer implemented action templates
with maximum of three arguments in CSSM
m
. On
the other hand, in CSSM
l
templates with maximum of
two arguments were learned. This indicates that the
learned templates in CSSM
l
are of lower complexity
than those in CSSM
m
. Furthermore, the model de-
signer in CSSM
m
introduced several additional predi-
cates aiming at reducing the model size and increas-
ing the action probability. This made the precondi-
tions and effects in CSSM
m
more complex than those
in CSSM
l
2
. Moreover, the proposed approach was
0 20 40
Branching factor
plan 1
plan 2
plan 3
plan 4
plan 5
plan 6
plan 7
0 20 40
Branching factor
plan 1
plan 2
plan 3
plan 4
plan 5
plan 6
plan 7
Figure 3: Median number of possible actions in CSSM
l
given the plan (top), and in CSSM
m
(bottom).
able to learn an argument ontology with seven levels
of abstraction and with 66 elements in total (See Fig.
1). The model designer in CSSM
m
modelled a sim-
pler ontology with five levels of abstraction and with
41 elements in total. This indicates that the learning
approach is able to discover more complex semantic
structures, given the same problem domain. Further-
more, an iteratively deepening depth first search with
maximum depth of seven was applied to analyse the
2
For example, the action wash in CSSM
l
consists of
three rules in the form of predicates in the precondition and
one rule in the effect clause. On the other hand, the same
action in CSSM
m
consists of seven rules in the precondition
and three rules in the effect.
Learning Models of Human Behaviour from Textual Instructions
419

state space graph. It discovered over 46 million states
in CSSM
l
and 10,312 states in CSSM
m
. Due to the
size of the models, the complete state space graphs
were not traversed. The larger number of discovered
states in CSSM
l
once again stands to show that the
learned model is more general than the manually de-
veloped one. The number of plans in both models was
not computed because the whole state space was not
completely explored.
CSSM
l
and CSSM
m
were also applied to seven
plans produced by observing the video log of the
kitchen experiment and by using the action schema
from the corresponding model. Fig. 3 shows the me-
dian branching factor in each plan. There the number
of possible actions from a given state in CSSM
l
(Fig.
3 (top)) was relatively high (between 30 and 55 exe-
cutable actions). This is explained by the model gen-
erality. In other words, CSSM
l
does not have many
restrictions which results in high behaviour variabil-
ity. It can also be seen that the first plan had a slightly
smaller branching factor than the rest of the plans.
This is due to the fact that the instructions describing
the experiment were compiled based on the execution
sequence in the first experiment. This means that the
learned model was overfitted for the first plan. Still, it
was able to successfully interpret the remaining plans.
In comparison, CSSM
m
had a median branching factor
of 10 (Fig. 3 (bottom)). This is due to the additional
modelling mechanisms applied by the designer to re-
duce the model complexity (Yordanova et al., 2014).
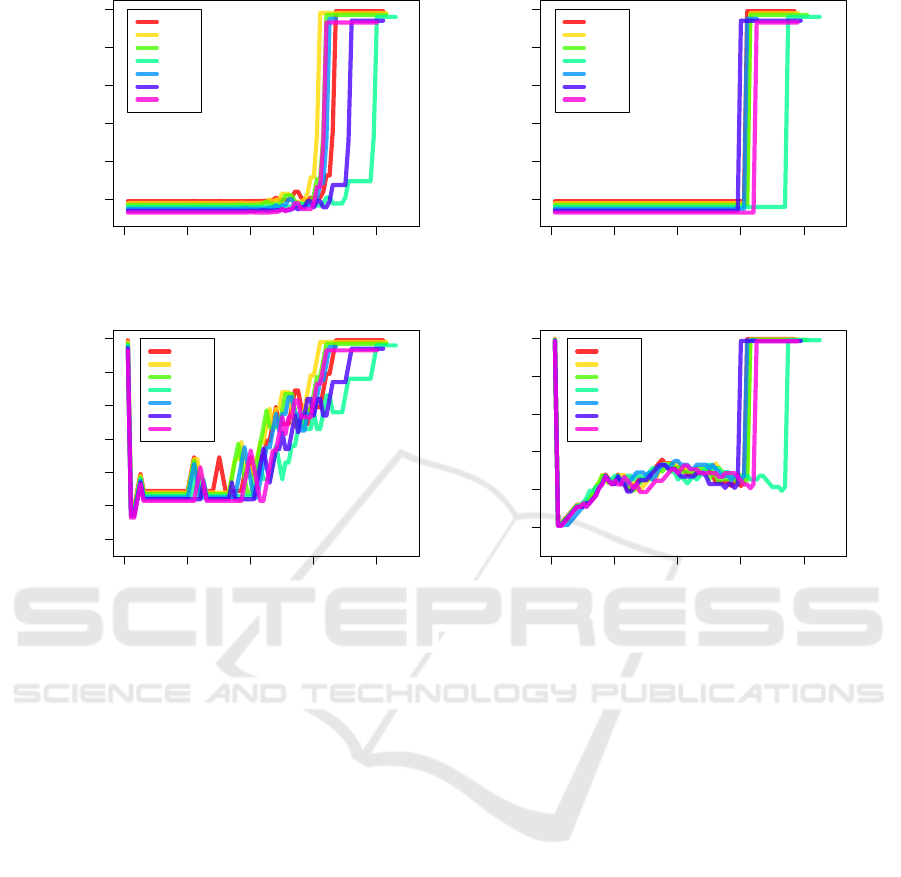
Regardless of the lower branching factor, having
ten choices from a given state reduced the action prob-
ability. This was reflected in the probability of ex-
ecuting an action in the plan given the model. Fig.
4 (top) shows that the probability was very low for
both models. Surprisingly, with nearing the goal state,
the probability in CSSM
l
increased (Fig. 4 (top left)),
while the probability in CSSM
m
stayed low until the
goal state was reached (Fig. 4 (top right)). This can
be explained by the shorter goal distance in CSSM
l
(Fig. 4 (bottom left)) compared to that in CSSM
m
(Fig. 4 (bottom right)). The distance to the goal in
CSSM
l
starts with 11 states to the goal and generally
decreases with each executed action. On the other
hand, the goal distance in CSSM
m
is 50 at the begin-
ning of the problem and it stays relatively long during
the execution of the plan. As the estimated goal dis-
tance is used as an action selection heuristic, the long
distance decreased the action probability in CSSM
m
.
6 DISCUSSION
In this paper we presented an approach to learning
models of human behaviour from textual instructions.
The results showed that the approach is able to learn
a causally correct model of human behaviour. The
model was able to explain the behaviour of seven ex-
periment participants that executed kitchen tasks.
In difference to existing approaches, the proposed
method was able to learn a complex domain ontology.
It was then used for generalising the model. This was
reflected in the large state space and branching factor
of the resulting model.
It also applied a new method for causal relation
discovery, that was previously not applied to model
learning problems. The method yielded good results
without the need of a learning phase.
The model was compared to a hand-crafted CSSM
model. The results showed that the learned model is
more general than the hand-crafted model. On the
other hand, they also showed that the learned model
has smaller estimated goal distance. This resulted in
the higher action probability when executing a plan,
compared to the hand-crafted model.
Some of the limitations, the learned model had,
are as follows. The model was able to learn actions
with simple predicates. This resulted in the model
generalisation. However, if applied to activity recog-
nition, general models tend to decrease the model per-
formance due to the high branching factor. This can
be solved through reliable action selection heuristics,
or through strategies for reducing the model complex-
ity trough more complex predicates (Yordanova et al.,
2014). In the future, we intend to include mechanisms
for utilising these strategies during the learning pro-
cess.
The model was unable to learn repeating actions,
such as repetitively eating or drinking. This is due to
the fact that the model learned that the precondition
for executing the action is that it still has not been
executed
3
. Then to repeat the action, the precondition
that the action was not executed is violated. To solve
this problem, a mechanism has to be introduced for
identifying repeating actions in the text.
Another aspect of model learning is how to learn
the initial and goal states. In this work we defined
them manually. In the future we intend to investigate
methods for learning the initial and goal state based
on possible predicate combinations and reinforcement
learning techniques.
Furthermore, in this work we only addressed the
problem of learning the model structure through its
domain ontology and the preconditions and effects
3
This is not a problem for action pairs like open and
close as they negate each other’s effects. However, for ac-
tions that do not have negating action, the executed predi-
cate cannot be negated, rendering the action impossible.
ICAART 2016 - 8th International Conference on Agents and Artificial Intelligence
420
0 20 40 60 80
0.0 0.2 0.4 0.6 0.8 1.0
Time step
Action probability
plan 1
plan 2
plan 3
plan 4
plan 5
plan 6
plan 7
0 20 40 60 80
0.0 0.2 0.4 0.6 0.8 1.0
Time step
Action probability
plan 1
plan 2
plan 3
plan 4
plan 5
plan 6
plan 7
0 20 40 60 80
−12 −8 −6 −4 −2 0
Time step
Estimated distance to goal
plan 1
plan 2
plan 3
plan 4
plan 5
plan 6
plan 7
0 20 40 60 80
−50 −40 −30 −20 −10 0
Time step
Estimated distance to goal
plan 1
plan 2
plan 3
plan 4
plan 5
plan 6
plan 7
Figure 4: Probability of selecting the action in the plan, given CSSM
l
(top left) and given CSSM
m
(top right), and estimated
distance to goal, given the action executed in the plan for CSSM
l
(bottom left) and for CSSM
m
(bottom right). To improve the
visibility of overlapping lines, each line was shifted with 1% from the preceding.
describing the actions. However, if we want to ap-
ply the models to activity recognition tasks, the model
needs to be optimised to increase the probability of
selecting the correct action. This can be done by em-
ploying reinforcement learning techniques based on
observations similar to those proposed in (Branavan
et al., 2012).
In the future, we intend to extend our approach
to learning models for AR problems based on sensor
observations. To achieve that, methods for optimising
the model structure will be investigated.
REFERENCES
Branavan, S. R. K., Kushman, N., Lei, T., and Barzilay, R.
(2012). Learning high-level planning from text. In
Proceedings of the 50th Annual Meeting of the Asso-
ciation for Computational Linguistics: Long Papers -
Volume 1, ACL ’12, pages 126–135, Stroudsburg, PA,
USA. Association for Computational Linguistics.
Branavan, S. R. K., Zettlemoyer, L. S., and Barzilay, R.
(2010). Reading between the lines: Learning to map
high-level instructions to commands. In Proceed-
ings of the 48th Annual Meeting of the Association
for Computational Linguistics, ACL ’10, pages 1268–
1277, Stroudsburg, PA, USA. Association for Compu-
tational Linguistics.
Chen, D. L. and Mooney, R. J. (2011). Learning to in-
terpret natural language navigation instructions from
observations. In Proceedings of the 25th AAAI Con-
ference on Artificial Intelligence (AAAI-2011), pages
859–865.
Chen, L., Hoey, J., Nugent, C., Cook, D., and Yu, Z. (2012).
Sensor-based activity recognition. IEEE Transactions
on Systems, Man, and Cybernetics, Part C: Applica-
tions and Reviews, 42(6):790–808.
Granger, C. W. J. (1969). Investigating Causal Relations
by Econometric Models and Cross-spectral Methods.
Econometrica, 37(3):424–438.
Hiatt, L. M., Harrison, A. M., and Trafton, J. G. (2011).
Accommodating human variability in human-robot
teams through theory of mind. In Proceedings of
the Twenty-Second International Joint Conference on
Artificial Intelligence, IJCAI’11, pages 2066–2071,
Barcelona, Spain. AAAI Press.
Hoey, J., Poupart, P., Bertoldi, A. v., Craig, T., Boutilier, C.,
and Mihailidis, A. (2010). Automated handwashing
assistance for persons with dementia using video and
a partially observable markov decision process. Com-
Learning Models of Human Behaviour from Textual Instructions
421

puter Vision and Image Understanding, 114(5):503–
519.
Kollar, T., Tellex, S., Roy, D., and Roy, N. (2014). Ground-
ing verbs of motion in natural language commands
to robots. In Khatib, O., Kumar, V., and Sukhatme,
G., editors, Experimental Robotics, volume 79 of
Springer Tracts in Advanced Robotics, pages 31–47.
Springer Berlin Heidelberg.
Kr
¨
uger, F., Hein, A., Yordanova, K., and Kirste, T. (2015).
Recognising the actions during cooking task (cooking
task dataset). University Library, University of Ros-
tock. http://purl.uni-rostock.de/rosdok/id00000116.
Kr
¨
uger, F., Nyolt, M., Yordanova, K., Hein, A., and Kirste,
T. (2014). Computational state space models for activ-
ity and intention recognition. a feasibility study. PLoS
ONE, 9(11):e109381.
Kr
¨
uger, F., Yordanova, K., Hein, A., and Kirste, T. (2013).
Plan synthesis for probabilistic activity recognition. In
Filipe, J. and Fred, A. L. N., editors, Proceedings of
the 5th International Conference on Agents and Ar-
tificial Intelligence (ICAART 2013), pages 283–288,
Barcelona, Spain. SciTePress.
Kr
¨
uger, F., Yordanova, K., K
¨
oppen, V., and Kirste, T.
(2012). Towards tool support for computational causal
behavior models for activity recognition. In Proceed-
ings of the 1st Workshop: ”Situation-Aware Assistant
Systems Engineering: Requirements, Methods, and
Challenges” (SeASE 2012) held at Informatik 2012,
pages 561–572, Braunschweig, Germany.
Li, X., Mao, W., Zeng, D., and Wang, F.-Y. (2010). Auto-
matic construction of domain theory for attack plan-
ning. In IEEE International Conference on Intelli-
gence and Security Informatics (ISI), 2010, pages 65–
70.
Miller, G. A. (1995). Wordnet: A lexical database for en-
glish. Commun. ACM, 38(11):39–41.
Nguyen, T. A., Kambhampati, S., and Do, M. (2013).
Synthesizing robust plans under incomplete domain
models. In Burges, C., Bottou, L., Welling, M.,
Ghahramani, Z., and Weinberger, K., editors, Ad-
vances in Neural Information Processing Systems 26,
pages 2472–2480. Curran Associates, Inc.
Okeyo, G., Chen, L., Wang, H., and Sterritt, R. (2011).
Ontology-based learning framework for activity assis-
tance in an adaptive smart home. In Chen, L., Nugent,
C. D., Biswas, J., and Hoey, J., editors, Activity Recog-
nition in Pervasive Intelligent Environments, volume 4
of Atlantis Ambient and Pervasive Intelligence, pages
237–263. Atlantis Press.
Perkowitz, M., Philipose, M., Fishkin, K., and Patterson,
D. J. (2004). Mining models of human activities from
the web. In Proceedings of the 13th International
Conference on World Wide Web, WWW ’04, pages
573–582, New York, NY, USA. ACM.
Philipose, M., Fishkin, K. P., Perkowitz, M., Patterson,
D. J., Fox, D., Kautz, H., and Hahnel, D. (2004). In-
ferring activities from interactions with objects. IEEE
Pervasive Computing, 3(4):50–57.
Ramirez, M. and Geffner, H. (2011). Goal recognition over
pomdps: Inferring the intention of a pomdp agent. In
Proceedings of the Twenty-Second International Joint
Conference on Artificial Intelligence, volume 3 of IJ-
CAI’11, pages 2009–2014, Barcelona, Spain. AAAI
Press.
Richter, S. and Westphal, M. (2010). The lama planner:
Guiding cost-based anytime planning with landmarks.
Journal of Artificial Intelligence Research, 39(1):127–
177.
Sil, A. and Yates, E. (2011). Extracting strips representa-
tions of actions and events. In Recent Advances in
Natural Language Processing, pages 1–8.
Tenorth, M., Nyga, D., and Beetz, M. (2010). Understand-
ing and executing instructions for everyday manipu-
lation tasks from the world wide web. In IEEE In-
ternational Conference on Robotics and Automation
(ICRA), pages 1486–1491.
Ye, J., Stevenson, G., and Dobson, S. (2014). Usmart:
An unsupervised semantic mining activity recogni-
tion technique. ACM Trans. Interact. Intell. Syst.,
4(4):16:1–16:27.
Yordanova, K. (2015a). Discovering causal relations in tex-
tual instructions. In Recent Advances in Natural Lan-
guage Processing, pages 714–720, Hissar, Bulgaria.
Yordanova, K. (2015b). Time series from textual instruc-
tions for causal relations discovery (causal relations
dataset). University Library, University of Rostock.
http://purl.uni-rostock.de/rosdok/id00000117.
Yordanova, K. and Kirste, T. (2015). A process for sys-
tematic development of symbolic models for activity
recognition. ACM Transactions on Interactive Intelli-
gent Systems, 5(4).
Yordanova, K., Kr
¨
uger, F., and Kirste, T. (2012). Tool sup-
port for activity recognition with computational causal
behaviour models. In Proceedings of the 35th German
Conference on Artificial Intelligence, pages 561–573,
Saarbr
¨
ucken, Germany.
Yordanova, K., Nyolt, M., and Kirste, T. (2014). Strategies
for reducing the complexity of symbolic models for
activity recognition. In Agre, G., Hitzler, P., Kris-
nadhi, A., and Kuznetsov, S., editors, Artificial In-
telligence: Methodology, Systems, and Applications,
volume 8722 of Lecture Notes in Computer Science,
pages 295–300. Springer International Publishing.
Zhang, Z., Webster, P., Uren, V., Varga, A., and Ciravegna,
F. (2012). Automatically extracting procedural knowl-
edge from instructional texts using natural language
processing. In Calzolari, N., Choukri, K., Declerck,
T., Do
˘
gan, M. U., Maegaard, B., Mariani, J., Moreno,
A., Odijk, J., and Piperidis, S., editors, Proceedings of
the International Conference on Language Resources
and Evaluation (LREC’12), Istanbul, Turkey. Euro-
pean Language Resources Association.
Zhuo, H. H. and Kambhampati, S. (2013). Action-model
acquisition from noisy plan traces. In Proceedings
of the 23rd International Joint Conference on Artifi-
cial Intelligence (IJCAI), pages 2444–2450, Beijing,
China. AAAI.
ICAART 2016 - 8th International Conference on Agents and Artificial Intelligence
422
