
Eco-routing: An Ant Colony based Approach
Ahmed Elbery
1
, Hesham Rakha
2
, Mustafa Y. ElNainay
3
,
Wassim Drira
4
and Fethi Filali
4
1
Dept. of Computer Science, Virginia Tech, Blacksburg, VA, U.S.A.
2
Civil and Environmental Engineering, Virginia Tech, 3500 Transportation Research Plaza, 24061, Blacksburg, VA, U.S.A.
3
Dept. of Computer and Systems Eng, Alexandria University, Alexandria, Egypt
4
Qatar Mobility Innovations Center, PO Box 210531, Qatar Science and Technology Park, Doha, Qatar
Keywords: Eco-routing, Ant Colony, Fuel Consumption, Emissions, Travel Time, Vehicle Routing, ITS.
Abstract: Global warming, environmental pollution, and fuel shortage are currently major worldwide challenges. Eco-
routing is one of several tools that attempt to address this challenge by minimizing network-wide vehicle fuel
consumption and emission levels. Eco-routing systems select the most environmentally friendly route. The
subpopulation feedback eco-routing (SPF-ECO) algorithm that is implemented in the INTEGRATION
software can produce a reduction in fuel consumption levels by approximately 17%. However, in some cases,
due to delayed updates or the lack for updates, its performance degrades. In this paper, we propose the ant
colony based eco-routing technique (ACO-ECO), which is a novel feedback eco-routing and cost updating
algorithm to overcome these shortcomings. In the ACO-ECO algorithm, real-time performance measures on
various roadway links are shared. Vehicles build their minimum path routes using the latest real-time
information to minimize their fuel consumption and emission levels. ACO-ECO is also able to capture
randomness in route selection, pheromone updating, and pheromone evaporation. The results show that the
ACO-ECO algorithm and SPF-ECO have similar performances in normal cases. However, in the case of link
blocking, the ACO-ECO algorithm reduces the network-wide fuel consumption and CO
2
emission levels in
the range of 2.3% to 6.0%. It also reduces the average trip time by approximately 3.6% to 14.0%.
1 INTRODUCTION
The environmental and economic impact of the
transportation sector has necessitated research in
recent years because the transportation sector is an
important source of the major current challenges,
including: global warming, energy and fuel shortage,
and environmental pollution. In 2008, the U.S.
Department of Energy mentioned in (U.S. Dept.
Energy 2008) that approximately 30% of the fuel
consumption in the U.S. is consumed by vehicles
moving on the roadways. In addition, about one-third
of the U.S. carbon dioxide (
) emissions comes
from vehicles (U.S. E.P Agency 2006). The 2011
McKinsey Global Institute report estimated savings
of “about $600 billion annually by 2020” in terms of
fuel and time saved by helping vehicles avoid
congestion and reduce idling at red lights or left turns.
From the drivers’ perspective, drivers usually
select routes that minimize their costs such as travel
time or travel distance. However, the minimum time
or distance routes do not necessarily minimize the
fuel consumption or emission levels (Barth,
Boriboonsomsin et al. 2007, Ahn and Rakha 2008).
There are many cases where the minimum time routes
result in higher fuel consumption levels such as high-
speed routes; despite the time reduction that could be
achieved, the higher speed routes may produce higher
fuel consumption levels due to the higher vehicle
speeds, route grades or longer distance. Also, shorter
distance routes can result in higher fuel consumption
if the speed is too low or if the route has many
intersections that result in numerous deceleration and
acceleration manoeuvres. Selecting the minimum time
or minimum distance routes is simple compared to
finding the minimum fuel consumption routes. The
fuel consumption depends on many parameters such as
distance, travel time, route grades, congestion level,
vehicle characteristics, and the driving behaviour.
Researchers have proposed several models for the
estimation of vehicle fuel consumption and emission
levels. These models can be classified into two
classes; macroscopic models (Brzezinski 1999, ARB
2007) and microscopic models (Barth 2000, Rakha,
Ahn et al. 2004). In macroscopic models, the average
link speeds are used to estimate the fuel consumption
and emission levels for each link. This class is
Elbery, A., Rakha, H., ElNainay, M., Drira, W. and Filali, F.
Eco-routing: An Ant Colony based Approach.
In Proceedings of the International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2016), pages 31-38
ISBN: 978-989-758-185-4
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
31

characterized by its simplicity but has a limited
accuracy because it ignores the speed and the
acceleration impacts on fuel consumption levels.
Meanwhile, microscopic models overcome this
limitation using instantaneous speed and acceleration
levels to estimate the fuel consumption and emission
levels. Consequently, microscopic models provide
higher accuracy at the cost of model complexity.
Eco-routing (Ericsson, Larsson et al. 2006) was
developed to select the route that minimizes vehicle
fuel consumption levels between an origin and
destination. In a feedback system, Eco-routing
depends on the vehicle and route characteristics as
well as its ability to report this information to a traffic
management center (TMC) that updates the routing
information, rebuilds the routes, and sends the new
routes to vehicles traversing the network.
Eco-routing is a promising navigation technique
because it results in a significant reduction in fuel
consumption and emission levels. However, through
some improvements, the Eco-routing system can be
further enhanced to produce additional fuel
consumption and emission savings.
In this paper, we first study the Eco-routing
performance and show that in some cases its
performance may not be optimum. Subsequently,
based on this, we propose an ant colony Eco-routing
(ACO-ECO) algorithm that employs the ant colony
optimization algorithms (Dorigo and Birattari 2010).
Due to the major differences between the ant colony
and the transportation network, the ant colony
algorithms are not directly applied to select the best
routes, however, they are used to optimize the route
selection process by optimizing the route selection
updating. Finally, we compare the proposed approach
to the subpopulation feedback Eco-routing algorithm
(SPF-ECO) (Rakha, Ahn et al. 2012).
The remainder of this paper is organized as
follows. An overview of the Eco-routing literature
and the subpopulation feedback assignment Eco-
routing (SPF-ECO) algorithm is introduced. This is
followed by outlining the main problems with the
SPF-ECO algorithm. Subsequently, an overview of
the ant colony optimization is presented. After that,
the proposed approach (ACO-ECO) is described.
Subsequently, the simulation results that compare the
ACO-ECO to the SPF-ECO are presented and
discussed. Finally, the study conclusions are presented
together with recommendations for further research.
2 ECO-ROUTING LITERATURE
In 2006, Ericsson et al. proposed the Eco-routing in
(Ericsson, Larsson et al. 2006) where they presented
a comprehensive study that provides optimal route
choices for lowest fuel consumption. The fuel
consumption measurements are made through the
extensive deployment of sensing devices in the street
network in the city of Lund, in Sweden. This study
showed that about 46% of the trips were not made on
the most fuel-efficient route. And approximately 8%
of the fuel consumption could be saved on average
using the most fuel-efficient routes. In 2007, Barth et
al. (Barth, Boriboonsomsin et al. 2007) combined
sophisticated mobile-source energy and emission
models with route minimization algorithms to
develop navigation techniques that minimize energy
consumption and pollutant emissions. They
developed a set of cost functions that include the fuel
consumption and the emission levels for the road
links. In 2007, Ahn and Rakha (Ahn and Rakha 2007)
showed the importance of route selection on the fuel
consumption and environmental pollution reduction,
by demonstrating through field tests that an emission
and energy optimized traffic assignment could reduce
emissions by 14 to 18%, and fuel consumption
by 17 to 25% over the standard user equilibrium and
system optimum assignment. Later in 2012, Rakha et
al. (Rakha, Ahn et al. 2012), introduced a stochastic,
multi-class, dynamic traffic assignment framework
for simulating Eco-routing using the
INTEGRATION software (Rakha Last Access Feb.
2016). They demonstrated that fuel savings of
approximately 15% using two scenarios were
achievable. In (Boriboonsomsin, Barth et al. 2012),
the authors developed an Eco-routing navigation
system that selects the fuel-efficient routes based on
both historical and real-time traffic information.
2.1 Subpopulation Feedback
Eco-routing
In this section, we will describe in details the
subpopulation feedback assignment Eco-Routing
SPF-ECO (Rakha, Ahn et al. 2012) implemented in
the INTEGRATION software. INTEGRATION uses
the VT-Micro model (Rakha, Ahn et al. 2004) for
calculating the fuel consumption rate
(
)
in / for
each vehicle as shown in Equation (1).
(
)
=
,
≥0
,
<0
(1)
VEHITS 2016 - International Conference on Vehicle Technology and Intelligent Transport Systems
32

Here
,
are model regression coefficients at
speed exponent and acceleration exponent,
,
are model regression coefficients at speed exponent
and acceleration exponent, is the instantaneous
vehicle speed in (km/h), and is the instantaneous
vehicle acceleration (km/h/s).
An important characteristic of INTEGRATION is
its time granularity which is a deci-second resolution.
This granularity enables it to accurately calculate the
fuel consumption and emissions based on
instantaneous speed and acceleration levels.
In SPF-ECO, when the vehicle enters a new link.
The vehicle’s fuel consumption and emission levels
are reset to zero for the new link. Subsequently, the
SPF-ECO algorithm periodically calculates the fuel
consumption and emissions for each vehicle using
Equation (1). For each vehicle, the estimated fuel
consumption and emission levels are accumulated
until the vehicle traverses the link. When a vehicle
leaves a link, it submits its fuel consumption cost for
this link to the traffic management center (TMC),
which updates the link fuel consumption using some
smoothing techniques. Subsequently,
INTEGRATION periodically rebuilds the routes for
each origin-destination pair at a frequency specified
by the user. Subsequently, vehicles use the latest
paths when looking identifying the next link along the
route. This mechanism has three main shortcomings
that are discussed in this section.
2.1.1 Fixed Cost for Empty Links
Assume that a link
was loaded with a high traffic
flow that resulted in congestion on this link. This
congestion will result in a lower speed and increasing
the acceleration/deceleration noise. Consequently,
increasing the fuel consumption and emission levels
on this link. At a certain time, the SPF-ECO system
will re-route vehicles to another route that reduces the
route cost. Since the vehicles on
have been exposed
to the congestion, the link fuel consumption will be
very high after these vehicles leave the link. As the
system re-routes vehicles to other routes, the link will
not be loaded by vehicles until the routing
information changes. Consequently, the cost of
will continue to be high while it is actually
decreasing. This lag in the system is typical of any
feedback control system and will result in vehicles
using sub-optimal routes. Consequently, increasing
the network-wide fuel consumption levels.
2.1.2 Fixed Cost for Blocked Links
A reverse situation can take place in case of blocking
a link (for example due to an incident). In this case
the vehicles that were not blocked will have a low fuel
consumption level, and will report it when leaving the
link. The SPF-ECO will maintain a low cost for this
link as long as the link is blocked since there is no
vehicle leaving the link to update the information on
this link. Consequently, the SPF-ECO will continue
to use this route and load more vehicles to this link
resulting in higher fuel consumption and emission
levels.
2.1.3 Delayed Updates
The third point is that the updates are only sent when
a vehicle leaves a link. For long links and/or low-
speed links, the link travel time is relatively long.
Consequently, the information used to update the
SPF-ECO routing might be obsolete and may not
reflect the current state of the link. This inaccurate
routing information might result in incorrect routing
decisions and hence increase the fuel consumption
level.
In the proposed approach, we solve these
problems by utilizing ant colony techniques to update
the link cost function (the fuel consumption level in
this application).
3 ANT COLONY OPTIMIZATION
Ant colony optimization (Dorigo and Birattari 2010)
is a branch of the larger field of swarm intelligence
(Blum and Li 2008). Swarm intelligence studies the
behavioural patterns of social insects such as bees,
termites, and ants in order to simulate these processes.
Ant colony optimization is a meta-heuristic iterative
technique inspired from the foraging behaviour of
some ant species. In the ant colony, ants walking to
and from a food source deposit a substance called
pheromone on the ground. In this way, ants mark the
path to be followed by other members of the colony.
The shorter the path, the higher the pheromone on that
route, and consequently, the preferable this route is.
The other ant colony members perceive the presence
of pheromone and tend to follow paths where
pheromone concentration is higher. Ant colony
optimization exploits a similar mechanism for solving
some optimization problems.
In this paper, we use the same ant colony concept
to optimize the fuel consumption and emission cost
for a transportation network. Vehicles are employed
as artificial ants, the pheromone is considered to be
the inverse of the fuel consumption cost for each link.
Each artificial ant periodically deposits the
Eco-routing: An Ant Colony based Approach
33

pheromone by updating the fuel consumption cost for
the link it is traversing.
There are many variants of ant colony
optimization. However, all of them share the same
idea described earlier. The main steps in each
iteration are: 1) construct the solutions, 2) conduct an
optional local search step, and 3) update pheromones.
The ant colony system does not specify how these
three steps are scheduled and synchronized, the
system leaves these decisions to the algorithm
designer (Blum 2005). In the solution construction
step, artificial ants construct a feasible solution and
add it to the solution space. The system starts with an
empty solution space, the ants start at the nest, and
each ant probabilistically chooses a solution
between a set of paths
,
,…
to reach the
food source. To choose between these paths, each ant
uses the probability
computed in Equation (2).
=
∑
(2)
Where
is the amount of pheromone on path
.
This probabilistic behavior for route selection
guarantees the exploration of more feasible solutions
and avoids converging to local ones.
The pheromone updating takes place while the
ants are moving, where they deposit the pheromone
on their paths. Also, as time passes, the pheromone
evaporates based on an evaporation factor.
Subsequently, after each iteration, the phenome is
updated according to Equation (3).
=
(
1−
)
+
(3)
Where is the number of ants that traverse a
link, and
is the amount of pheromone deposited
by ant. After the solution construction and before
the pheromone updating, the local search step can be
carried out to improve the solution. This step is
optional and problem specific.
In the proposed approach, we utilize these steps to
achieve our objective of minimizing the fuel
consumption and consequently the pollutant
emissions.
4 ANT COLONY BASED
ECO-ROUTING (ACO-ECO)
This section presents the proposed approach (ACO-
ECO) and describes its operation in details. In ACO-
ECO, the ant colony techniques will be applied to
optimize the fuel consumption and emissions in the
transportation network. The vehicles are the artificial
ants, and the pheromone is the inverse of the fuel
consumption. Because of the major differences
between the ant colony system and the transportation
network, we introduce some variations to ant colony
techniques to tailor it to the specific application. The
ACO-ECO uses a number of steps that are described
here.
4.1 Initialization
This phase initializes the cost associated with the
various links. Because initially the links are free, the
cost of each link is initialized to the free flow speed
fuel consumption using equation (1).
4.2 Route Construction
This phase starts directly after the initialization phase
and is repeated periodically and was defined to be 60
seconds in this application. In this phase, the ACO-
ECO builds the minimum path based on the cost of
each link. When the vehicle leaves a route link, it
searches the tree to find its next link.
The probabilistic route selection (introduced by
Equation (2)) is an important mechanism in ant
colony algorithms to search all the available routes.
However, this mechanism as described in Equation
(2) cannot be applied in vehicular route selection
because it is not realistic. As mentioned earlier,
drivers try to select routes that minimize their cost,
while this probabilistic selection assigns a random
route to each vehicle based on the route’s pheromone
level (route cost) relative to that for all other routes.
Using this equation, and due to the randomness, a
vehicle might be assigned a very high-cost route
which is not realistic, and is not consistent with the
driver behaviour when selecting routes.
Consequently, it will result in a higher fuel
consumption level. So, we use another technique to
introduce some limited randomness into the route
selection mechanism while maintaining the error
within a given predefined margin. An error factor is
configured for the network. This error factor (α) is
used to add some error to the cost of the links,
subsequently to the tree building and the route
selection algorithms. The error value added to the link
cost is a randomly selected point from the standard
normal distribution(0,σ), where σ is the standard
deviation andσ=α._. In this way, we
have a grantee that 95.45% of the link costs are
within
(
1±2α
)
._. Which means that by
controlling the error factor we can control the
VEHITS 2016 - International Conference on Vehicle Technology and Intelligent Transport Systems
34

randomness level within the route selection
algorithm.
4.3 Pheromone Update
In this phase, two updating processes take place.
Pheromone deposition where ants deposit pheromone
to indirectly communicate the route preference to the
following ants. And the pheromone evaporation,
where the pheromone level on each link decays with
time.
4.3.1 Pheromone Deposition
In the vehicular network, each vehicle sends the cost
it experienced on a link to the TMC, and
consequently, the link cost is updated in the routing
algorithm. In the SPF-ECO, the vehicles only submit
the link cost when leaving the link. The advantage of
this method is the small number of updates being sent
on the network and consequently the low network
overhead. But on the other hand, it results in delayed
updates and fixed cost for empty or blocked links as
mentioned earlier.
In contrast to the SPF-ECO, the ACO-ECO
overcomes these issues by enabling vehicles to
submit multiple updates while traveling the link.
These updates can be sent periodically either time-
based or distance-based. Using time-based updating,
the vehicles have a predefined maximum updating
interval. The vehicles should send their estimation
for the link cost each seconds. This cost updating
method can control the number of updates that are
sent over the network. However, it has an important
drawback; for low speed links or blocked links, the
vehicles will send many unnecessary updates.
Another drawback is for short length links and/or
high speed links, this time interval may be longer
than the link traversal time. Consequently, no updates
would be sent for these links. This drawback can be
overcome by setting to a value that is shorter than
the minimum link travel time in the network,
however, this will result in many unnecessary updates
for long links or low speed links.
Another way to submit the link cost updates is the
distance based updating, where the vehicles should
submit an update every distance it traverses on the
link. In contrast to the time based updating, the
distance based method limits the number of updates
for each link. But on the other hand, for blocked links,
the updates will not be sent and consequently, the cost
will be fixed for blocked links resulting in the same
problem as the SPF-ECO algorithm.
Consequently, a compromise approach is
proposed, which combines both the time- and
distance-based updating to take advantage of the
merits of each approach. Also, we used the end of the
link updating where the vehicle sends an update when
it leaves the link. To estimate the link fuel
consumption, the ACO-ECO algorithm defines the
maximum time interval and the maximum
distance to report conditions. When any of these
conditions is met, the vehicle submits a new update
quantifying its estimation for the overall link cost, and
then resetting its time and distance counter. To
calculate the fuel it consumed, the ACO-ECO
periodically estimates the fuel consumption rate using
the VT-Micro model in Equation (1). And then uses
Equation (4) to accumulate the total fuel consumed in
the previous interval.
=
(
)
.∆
(4)
Where
(
)
is the VT-Micro model instantaneous
fuel consumption rate, and ∆is the fuel consumption
calculation interval which is typically 0.1 seconds in
INTEGRATION. Whenever either or is reached,
the ACO-ECO estimates the overall link fuel
consumption
as shown in Equation (5).
=
.
(5)
Where is the distance traveled in the previous
period in meters(≤), and the link length in
meters. This calculation assumes that the conditions
on the remainder of the link will continue as was
observed by the vehicle.
4.3.2 Pheromone Evaporation
To overcome the fixed cost problem for empty links,
the cost of these links must be updated when the TMC
has not received updates for a period of time. In an
ant colony, if no pheromone is deposited for a long
time, the link pheromone level will decay towards
zero due to the evaporation, this is an indication of the
low preference for that route. In a transportation
network, not receiving an update about a link for a
long time, indicates that this link is empty.
Consequently, the cost of this link must be updated
toward the free flow speed cost(
). So, in this
case, the TMC updates the cost as follows. First, it
finds the minimum updating interval (
) for the link.
This value is the minimum of three parameters; the
updating interval (T), the link travel time at free-flow
speed, and the updating interval in case of distance
based updating. These parameters are shown in
Equation (6). The rationale is that after receiving an
Eco-routing: An Ant Colony based Approach
35
update, the next vehicle will send an update in case of
one of three situations; it reaches its updating
interval, it reaches its updating distance, or it ends
the link.
=,
,
(6)
Where is the updating interval, is the updating
distance,
is the link length and
is the free-flow
speed of the link.
Subsequently, the ACO-ECO algorithm estimates
the overall link cost
as shown in Equation (7). This
evaporation technique results in exponential
increasing or decreasing in the link cost towards the
free-flow speed cost.
=
−
∆
−
(7)
Where
is the free-flow speed fuel
consumption estimate for the link, and ∆ is the
evaporation interval after which the evaporation
process should be performed for the link cost if no
updates were received.
5 SIMULATION RESULTS
In this section, we compare the proposed approach
ACO-ECO to the SPF-ECO for different traffic rates
using the INTEGRATION software (Rakha Last
Access Feb. 2016). The network shown in Figure 1
is used for comparing the two approaches.
Figure 1: Road Network used in Simulation.
The network consists of 10 zones with the main
highway (center horizontal road) between zone 1 and
zone 2, and two arterial roads (side roads). The
network size is 3.5 km x 1.5 km. The free-flow speeds
are 110 and 60 km/h for the highway and arterial
roads, respectively. The highway has 3 lanes in each
direction while the other roads have only 2 lanes in
each direction. Regarding the origin-destination
traffic demands (O-D demands), we use 5 different
scenarios, as shown in Table 1. The main traffic
stream is the traffic between zone 1 and 2 for each
direction, the side traffic streams are between each
two other zone pairs. This traffic rate is generated for
half an hour, and the simulation runs for 4500 seconds
to ensure that all the vehicles complete their trips.
Table 1: Origin-Destination Traffic Demand Configuration.
Main
Demand
(Veh/h)
Secondary
Demand
(Veh/h)
Total no.
vehicles
(Veh)
1 500 50 1600
2 1000 75 2650
3 1500 100 3700
4 2000 125 4750
5 2500 150 5800
The comparison is done in two cases; the normal
operation (no incident) case where there is no link
blocking, and in the case of blocking due to an
incident (link blocking case). For each case, we run
each traffic assignment technique (ACO-ECO, and
SPF-ECO) 20 times with different seeds to consider
the output variability due to randomization. This is
repeated for each of the five O-D demand
configurations. The error factor is set for both
techniques to 1%. For the ACO-ECO parameters, the
maximum update interval is 180 seconds, and the
maximum update distance is 750 meter.
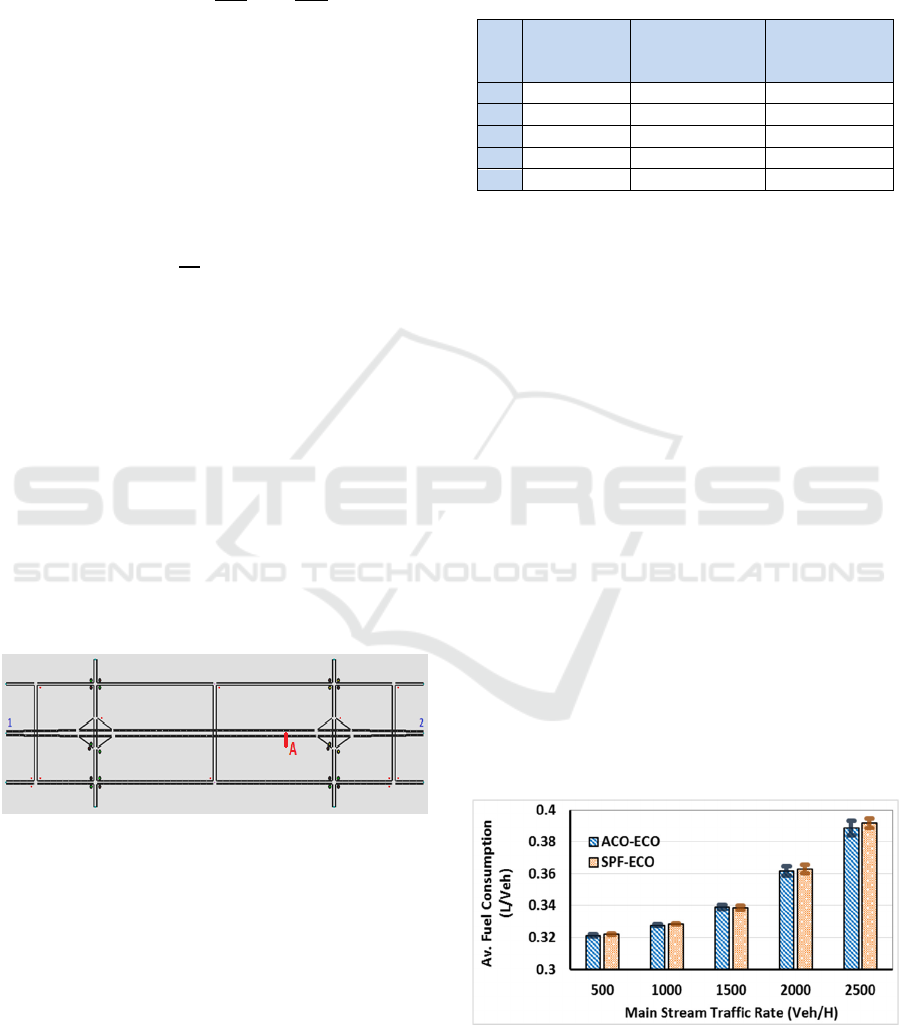
5.1 Normal Operation Scenarios
For the normal operation scenarios, the results show
no significant differences between the ACO-ECO and
the SPF-ECO for average fuel consumption levels, as
shown in Figure 2. The figure also shows that as the
traffic demand increases, the average fuel
consumption and the average trip time increases due
to the higher congestion levels. Moreover, the results
show the same behaviour for the average trip time,
theCO
and
emissions levels, where ACO-ECO
has no significant effect on any of them.
Figure 2: Average Fuel Consumption (L/Veh).
Regarding the emission, the ACO-ECO has a
higher emission level as shown in Figure 3.
VEHITS 2016 - International Conference on Vehicle Technology and Intelligent Transport Systems
36
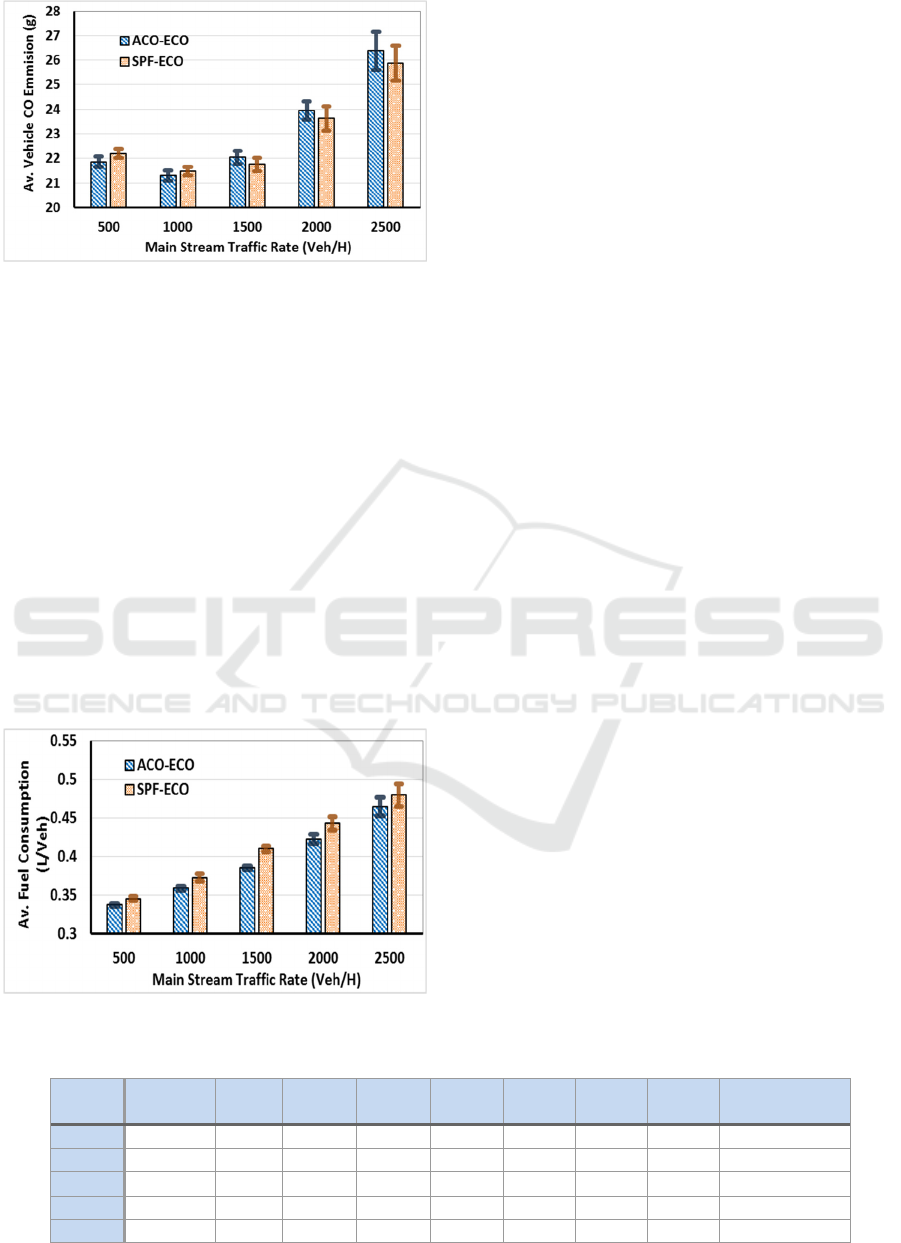
Figure 3: Average Vehicle CO Emission.
5.2 Incident Scenarios
To simulate the link blocking in the network, we
configured an incident on the highway from zone 1
and 2 at point (A) marked in Figure 1, the incident
does not affect the other direction from zone 2 to zone
1. This incident occurs 10 minutes after starting the
simulation and blocks 50% of the highway (1.5 lanes)
for 5 minutes. Then the blocking is reduced to 25% of
the highway for the next 10 minutes, then the incident
is completely removed and the highway works with
its full capacity.
Figure 4 shows the fuel consumption in case of an
incident. The figure demonstrates that the ACO-ECO
algorithm reduces the average fuel consumption level
for all traffic demands. The reduction ranges between
2.3% to 6% compared to the SPF-ECO.
Figure 4: The Average Fuel for the Link Blocking Scenario.
These results show the ability of ACO-ECO to
reduce the fuel consumption level and the trip time in
addition to all the time-related measurements. ACO-
ECO also succeeds in reducing the pollutant
emissions in most cases.
Table 2 shows the percentage reduction attributed
to the ACO-ECO for both fuel consumption, different
emissions, and different time-related measurements.
For instance, the fuel consumption is reduced by 6%
in the moderate traffic scenario and this reduction
ratio decreases as the traffic demand increases. This
also applies for the CO
emissions and the time-
related measurements. The reason is that as the traffic
demand increases, the congestion increases and thus
affects all the alternative routes, which limits the
ACO-ECO ability to recover from the congestion.
To find the significance of the reduction made by
ACO-ECO, analysis of variance (ANOVA) is
employed to compare means of ACO-ECO to that of
SPF-ECO.
The hypotheses are:-
• Null hypothesis: the means for both algorithms
are equal (
:
=
)
• The alternate hypothesis: the means are not
equal(
∶
).
We applied this ANOVA for the fuel consumption
results in the lowest traffic rate. Given this scenario
has the lowest reduction in fuel consumption. The
result shows that p-value is less than 0.0001. Which
gives a strong evidence to reject the null hypothesis.
And shows the significance of the reduction mad by
the ACO-ECO. And, since the lowest reduction level
is significant, we can conclude that the higher levels
for other configuration are also significant.
Table 2 also, shows some rare cases where the
some emissions increase in due to the use of ACO-
ECO. For instance, CO and NOx emissions increased
in case high traffic rates.
6 CONCLUSIONS
We propose an ACO-ECO traffic assignment
technique that is inspired from the ant colony
Table 2: Percent of Reduction Made by ACO-ECO over SPF-ECO in case of Link Blocking.
Traffic
rate
Fuel CO
2
CO HC NO
X
Trip
time
Stop
delay
Accel.
noise
Accel./Decel.
delay
500 2.37 2.29 3.75 3.71 1.60 3.64 4.04 1.87 12.02
1000 3.72 3.86 1.05 1.73 0.91 8.83 19.04 4.90 21.97
1500 6.06 6.42 -1.51 0.38 0.24 14.98 27.68 5.28 25.43
2000 4.57 4.75 0.49 2.19 0.11 12.66 19.75 4.91 16.84
2500 3.09 3.32 -2.10 -0.58 -0.75 7.11 15.39 1.61 11.34
Eco-routing: An Ant Colony based Approach
37

optimization algorithm. ACO-ECO attempts to
enhance the SPF-ECO algorithm that is currently
implemented in the INTEGRATION software. These
enhancements include cases in which the links are
blocked or no vehicles traverse the link. ACO-ECO
employs the ant colony techniques to minimize the
fuel consumption and emission levels. It uses the
route construction to build routes and assign them to
vehicles, it also applies pheromone deposition and
pheromone evaporation to update the route link costs.
These ant colony techniques are customized to be
suitable for transportation networks. In the case of
normal operation, the ACO-ECO performance is
similar to the SPF-ECO. While for link blocking
scenarios, the ACO-ECO reduces the fuel
consumption, average trip time, stopped delay, and
most of the emission levels. An important advantage
of the ACO-ECO is its flexibility; where its
parameters (error factor, maximum updating time,
maximum updating distance, and evaporation
interval) can be tuned in order to achieve better
performance. The fine tuning and testing of these
parameters are an important future extension of the
work presented in this paper.
Another future research is to study the effect of
each of the new updating methods on the network
traffic and studying the trade-off between the
reduction in the fuel consumption and emission levels
and the communication network traffic load. The
market penetration rate is an effective and important
parameter that should be studied. Also, it is important
to study the effect of the communication network on
the ACO-ECO performance.
ACKNOWLEDGEMENTS
This effort was jointly funded by the TranLIVE and
MATS University Transportation Centers and by
NPRP Grant 5-1272-1-214 from the Qatar National
Research Fund (a member of the Qatar Foundation).
REFERENCES
Ahn, K. and H. Rakha (2007). Field evaluation of energy
and environmental impacts of driver route choice
decisions. Intelligent Transportation Systems
Conference, 2007. ITSC 2007. IEEE, IEEE.
Ahn, K. and H. Rakha (2008). "The effects of route choice
decisions on vehicle energy consumption and
emissions." Transportation Research Part D: Transport
and Environment 13(3): 151-167.
ARB, C. A. R. B. (2007). " User’s Guide to EMFAC,
Calculating emission inventories for vehicles in
California.".
Barth, M., An, F., Younglove, T., Scora, G., Levine, C.,
Ross, M., and Wenzel, T. (2000). "Comprehensive
modal emission model (CMEM) version 2.0 user’s
guide. Riverside, Calif.".
Barth, M., et al. (2007). Environmentally-Friendly
Navigation. Intelligent Transportation Systems
Conference, 2007. ITSC 2007. IEEE.
Blum, C. (2005). "Ant colony optimization: Introduction
and recent trends." Physics of Life reviews 2(4): 353-
373.
Blum, C. and X. Li (2008). Swarm intelligence in
optimization, Springer.
Boriboonsomsin, K., et al. (2012). "Eco-Routing
Navigation System Based on Multisource Historical
and Real-Time Traffic Information." Intelligent
Transportation Systems, IEEE Transactions on 13(4):
1694-1704.
Brzezinski, D. J., Enns, P, and Hart, C. (1999). "Facility-
specific speed correction factors. MOBILE6
Stakeholder Review Document." U.S. Environmental
Protection Agency (EPA).
Dorigo, M. and M. Birattari (2010). Ant Colony
Optimization. Encyclopedia of Machine Learning. C.
Sammut and G. Webb, Springer US: 36-39.
Ericsson, E., et al. (2006). "Optimizing route choice for
lowest fuel consumption – Potential effects of a new
driver support tool." Transportation Research Part C:
Emerging Technologies 14(6): 369-383.
Rakha, H. ( Last Access Feb. 2016). INTEGRATION Rel.
2.40 for Windows - User's Guide, Volume I:
Fundamental Model Features. https://sites.google.com
/a/vt.edu/hrakha/.
Rakha, H., et al. (2004). Emission model development using
in-vehicle on-road emission measurements. Annual
Meeting of the Transportation Research Board,
Washington, DC.
Rakha, H., et al. (2012). "INTEGRATION Framework for
Modeling Eco-routing Strategies: Logic and
Preliminary Results." International Journal of
Transportation Science and Technology 1(3): 259-274.
U.S. Environ Protection Agency (2006). Inventory of U.S.
greenhouse gas emissions and sinks. 1990–2006,
Washington, DC, .
U.S. Dept. Energy (2008). Annual Energy Outlook 2008,
With Projection to 2030,. Energy Inf. Admin.,
Washington, DC, Rep. DOE/EIA-0383(2008),.
VEHITS 2016 - International Conference on Vehicle Technology and Intelligent Transport Systems
38
